
 テクノロジー周辺機器
AI
大規模な言語モデルで一般的に使用される回転位置エンコーディング RoPE の詳細な説明: なぜ絶対位置エンコーディングや相対位置エンコーディングよりも優れているのですか?
テクノロジー周辺機器
AI
大規模な言語モデルで一般的に使用される回転位置エンコーディング RoPE の詳細な説明: なぜ絶対位置エンコーディングや相対位置エンコーディングよりも優れているのですか?
大規模な言語モデルで一般的に使用される回転位置エンコーディング RoPE の詳細な説明: なぜ絶対位置エンコーディングや相対位置エンコーディングよりも優れているのですか?

2017 年に発表された「attention is all you need」論文以来、Transformer アーキテクチャは自然言語処理 (NLP) 分野の基礎となってきました。その設計は長年にわたってほとんど変わっておらず、2022 年にはロータリー ポジション エンコーディング (RoPE) の導入によりこの分野で大きな発展が見られました。
回転位置埋め込みは、最も高度な NLP 位置埋め込みテクノロジです。 Llama、Llama2、PaLM、CodeGen などの最も一般的な大規模言語モデルはすでにこれを使用しています。この記事では、回転位置エンコーディングとは何か、また、回転位置エンコーディングが絶対位置エンコーディングと相対位置エンコーディングの利点をどのようにうまく融合させるのかについて詳しく説明します。
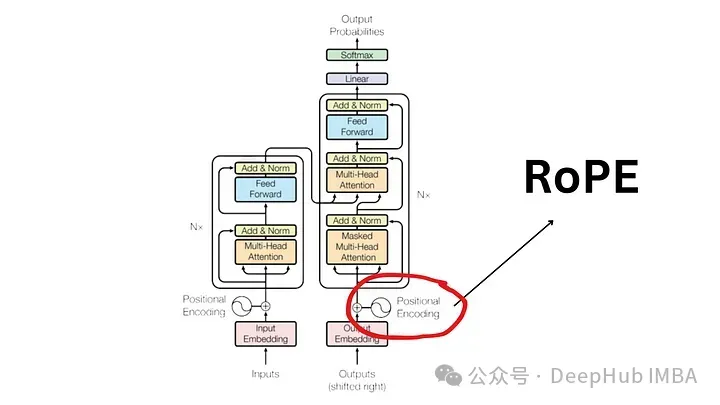
RoPE の重要性を理解するために、まず確認しましょう。位置エンコーディングが重要な理由 エンコーディングが重要です。 Transformer モデルは、その固有の設計により、入力トークンの順序を考慮しません。
たとえば、「犬が豚を追いかける」や「豚が犬を追いかける」などのフレーズは、意味は異なりますが、順序のないトークンのセットとして扱われるため、区別がつかないと見なされます。 シーケンス情報とその意味を維持するには、位置情報をモデルに統合するための表現が必要です。
絶対位置エンコード
文内の位置をエンコードするには、同じ次元のベクトルを使用する別のツールが必要です。各 A ベクトルは文内の位置を表します。たとえば、文内の 2 番目の単語に特定のベクトルを指定します。したがって、各文の位置には固有のベクトルがあります。次に、単語の埋め込みとそれらの対応する位置の埋め込みを組み合わせることによって、Transformer 層への入力が形成されます。
これらの埋め込みを生成するには、主に 2 つの方法があります:
- データから学習する:
- ここ 、位置ベクトルは、他のモデル パラメーターと同様に、トレーニング中に学習されます。位置ごとに一意のベクトルを学習します (例: 1 から 512)。これにより、シーケンスの最大長が制限されるという制限が生じます。モデルが位置 512 のみを学習する場合、その位置より長いシーケンスを表すことはできません。 サイン関数:
- この方法では、サイン関数を使用して各位置に一意の埋め込みを構築します。この構築の詳細は複雑ですが、基本的には配列内の各位置に一意の位置埋め込みが提供されます。実証研究により、データから正弦関数を学習して使用すると、現実世界のモデルで同等のパフォーマンスが得られることが示されています。 #絶対位置エンコーディングの制限
広く使用されていますが、絶対位置埋め込みには欠点がないわけではありません:
制限されたシーケンス長:
- 前述したように、モデルが特定の点の位置ベクトルを学習した場合、本質的にその制限を超える位置を表すことはできません。
- 位置埋め込みの独立性: 各位置埋め込みは、他の位置埋め込みから独立しています。これは、モデルの観点からは、位置 1 と 2 の差が位置 2 と 500 の差と同じであることを意味します。しかし実際には、位置 1 と位置 2 は、かなり離れている位置 500 よりも密接に関連しているはずです。この相対的な位置の欠如により、言語構造のニュアンスを理解するモデルの能力が妨げられる可能性があります。
- 相対位置エンコーディング
相対位置は、文内のメモの絶対位置ではなく、メモの位置に焦点を当てます。ノートペア間の関係、距離。この方法では、位置ベクトルを単語ベクトルに直接追加しません。代わりに、相対位置情報を組み込むようにアテンション メカニズムが変更されます。
T5 (Text-to-Text Transfer Transformer) は、相対位置埋め込みを利用するよく知られたモデルです。 T5 は、位置情報を処理する微妙な方法を導入しています:
位置オフセットのバイアス:
- T5 は、バイアス (浮動小数点数) を使用して、可能な各位置オフセットを表します。 。たとえば、バイアス B1 は、文内の絶対位置に関係なく、1 位置離れた 2 つのトークン間の相対距離を表す場合があります。
- セルフアテンション層での統合: この相対位置バイアス行列は、セルフアテンション層のクエリ行列とキー行列の積に追加されます。注目層。これにより、シーケンス内の位置に関係なく、同じ相対距離にあるマーカーが常に同じバイアスで表されることが保証されます。
- スケーラビリティ: このアプローチの大きな利点は、そのスケーラビリティです。これは任意の長さのシーケンスに拡張でき、絶対位置の埋め込みに比べて明らかな利点があります。
- 相対位置エンコーディングの制限
尽管它们在理论上很有吸引力,但相对位置编码得问题很严重
- 计算效率低下:必须创建成对的位置编码矩阵,然后执行大量张量操作以获得每个时间步的相对位置编码。特别是对于较长的序列。这主要是由于自注意力层中的额外计算步骤,其中位置矩阵被添加到查询键矩阵中。
- 键值缓存使用的复杂性:由于每个附加令牌都会改变每个其他令牌的嵌入,这使得 Transformer 中键值缓存的有效使用变得复杂。使用 KV 缓存的一项要求是已经生成的单词的位置编码, 在生成新单词时不改变(绝对位置编码提供)因此相对位置编码不适合推理,因为每个标记的嵌入会随着每个新时间步的变化而变化。
由于这些工程复杂性,位置编码未得到广泛采用,特别是在较大的语言模型中。
旋转位置编码 (RoPE)?
RoPE 代表了一种编码位置信息的新方法。传统方法中无论是绝对方法还是相对方法,都有其局限性。绝对位置编码为每个位置分配一个唯一的向量,虽然简单但不能很好地扩展并且无法有效捕获相对位置;相对位置编码关注标记之间的距离,增强模型对标记关系的理解,但使模型架构复杂化。
RoPE巧妙地结合了两者的优点。允许模型理解标记的绝对位置及其相对距离的方式对位置信息进行编码。这是通过旋转机制实现的,其中序列中的每个位置都由嵌入空间中的旋转表示。RoPE 的优雅之处在于其简单性和高效性,这使得模型能够更好地掌握语言语法和语义的细微差别。
旋转矩阵源自我们在高中学到的正弦和余弦的三角性质,使用二维矩阵应该足以获得旋转矩阵的理论,如下所示!
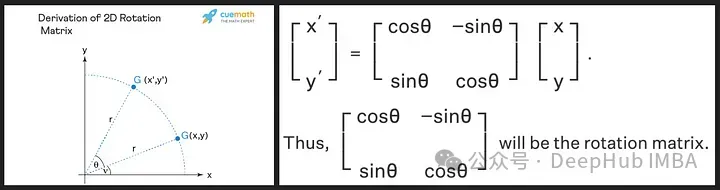
我们看到旋转矩阵保留了原始向量的大小(或长度),如上图中的“r”所示,唯一改变的是与x轴的角度。
RoPE 引入了一个新颖的概念。它不是添加位置向量,而是对词向量应用旋转。旋转角度 (θ) 与单词在句子中的位置成正比。第一个位置的向量旋转 θ,第二个位置的向量旋转 2θ,依此类推。这种方法有几个好处:
- 向量的稳定性:在句子末尾添加标记不会影响开头单词的向量,有利于高效缓存。
- 相对位置的保留:如果两个单词在不同的上下文中保持相同的相对距离,则它们的向量将旋转相同的量。这确保了角度以及这些向量之间的点积保持恒定
RoPE 的矩阵公式

RoPE的技术实现涉及到旋转矩阵。在 2D 情况下,论文中的方程包含一个旋转矩阵,该旋转矩阵将向量旋转 Mθ 角度,其中 M 是句子中的绝对位置。这种旋转应用于 Transformer 自注意力机制中的查询向量和键向量。
对于更高维度,向量被分成 2D 块,并且每对独立旋转。这可以被想象成一个在空间中旋转的 n 维。听着这个方法好好像实现是复杂,其实不然,这在 PyTorch 等库中只需要大约十行代码就可以高效的实现。
import torch import torch.nn as nn class RotaryPositionalEmbedding(nn.Module): def __init__(self, d_model, max_seq_len): super(RotaryPositionalEmbedding, self).__init__() # Create a rotation matrix. self.rotation_matrix = torch.zeros(d_model, d_model, device=torch.device("cuda")) for i in range(d_model): for j in range(d_model): self.rotation_matrix[i, j] = torch.cos(i * j * 0.01) # Create a positional embedding matrix. self.positional_embedding = torch.zeros(max_seq_len, d_model, device=torch.device("cuda")) for i in range(max_seq_len): for j in range(d_model): self.positional_embedding[i, j] = torch.cos(i * j * 0.01) def forward(self, x): """Args:x: A tensor of shape (batch_size, seq_len, d_model). Returns:A tensor of shape (batch_size, seq_len, d_model).""" # Add the positional embedding to the input tensor. x += self.positional_embedding # Apply the rotation matrix to the input tensor. x = torch.matmul(x, self.rotation_matrix) return x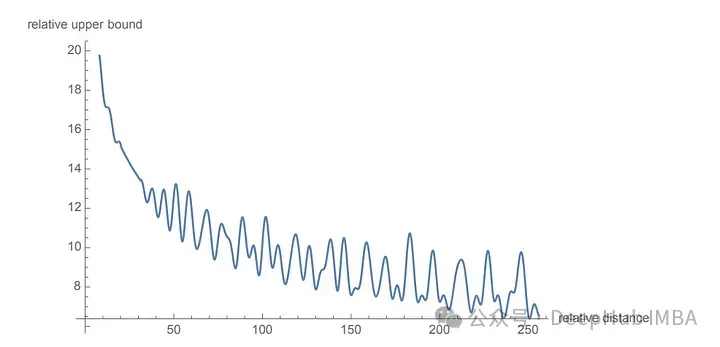
为了旋转是通过简单的向量运算而不是矩阵乘法来执行。距离较近的单词更有可能具有较高的点积,而距离较远的单词则具有较低的点积,这反映了它们在给定上下文中的相对相关性。
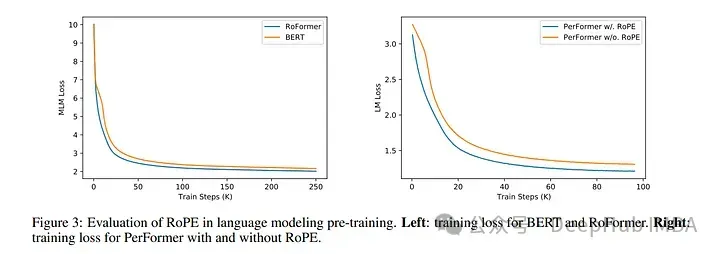
使用 RoPE 对 RoBERTa 和 Performer 等模型进行的实验表明,与正弦嵌入相比,它的训练时间更快。并且该方法在各种架构和训练设置中都很稳健。
最主要的是RoPE是可以外推的,也就是说可以直接处理任意长的问题。在最早的llamacpp项目中就有人通过线性插值RoPE扩张,在推理的时候直接通过线性插值将LLAMA的context由2k拓展到4k,并且性能没有下降,所以这也可以证明RoPE的有效性。
代码如下:
import transformers old_init = transformers.models.llama.modeling_llama.LlamaRotaryEmbedding.__init__ def ntk_scaled_init(self, dim, max_position_embeddings=2048, base=10000, device=None): #The method is just these three linesmax_position_embeddings = 16384a = 8 #Alpha valuebase = base * a ** (dim / (dim-2)) #Base change formula old_init(self, dim, max_position_embeddings, base, device) transformers.models.llama.modeling_llama.LlamaRotaryEmbedding.__init__ = ntk_scaled_init
总结
旋转位置嵌入代表了 Transformer 架构的范式转变,提供了一种更稳健、直观和可扩展的位置信息编码方式。
RoPE不仅解决了LLM context过长之后引起的上下文无法关联问题,并且还提高了训练和推理的速度。这一进步不仅增强了当前的语言模型,还为 NLP 的未来创新奠定了基础。随着我们不断解开语言和人工智能的复杂性,像 RoPE 这样的方法将有助于构建更先进、更准确、更类人的语言处理系统。
以上が大規模な言語モデルで一般的に使用される回転位置エンコーディング RoPE の詳細な説明: なぜ絶対位置エンコーディングや相対位置エンコーディングよりも優れているのですか?の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック



 Groq Llama 3 70B をローカルで使用するためのステップバイステップ ガイド
Jun 10, 2024 am 09:16 AM
Groq Llama 3 70B をローカルで使用するためのステップバイステップ ガイド
Jun 10, 2024 am 09:16 AM
翻訳者 | Bugatti レビュー | Chonglou この記事では、GroqLPU 推論エンジンを使用して JanAI と VSCode で超高速応答を生成する方法について説明します。 Groq は AI のインフラストラクチャ側に焦点を当てているなど、誰もがより優れた大規模言語モデル (LLM) の構築に取り組んでいます。これらの大型モデルがより迅速に応答するためには、これらの大型モデルからの迅速な応答が鍵となります。このチュートリアルでは、GroqLPU 解析エンジンと、API と JanAI を使用してラップトップ上でローカルにアクセスする方法を紹介します。この記事では、これを VSCode に統合して、コードの生成、コードのリファクタリング、ドキュメントの入力、テスト ユニットの生成を支援します。この記事では、独自の人工知能プログラミングアシスタントを無料で作成します。 GroqLPU 推論エンジン Groq の概要
 大規模モデルは時系列予測にも非常に強力です。中国チームがLLMの新機能を有効にし、従来のモデルを超えたSOTAを達成
Apr 11, 2024 am 09:43 AM
大規模モデルは時系列予測にも非常に強力です。中国チームがLLMの新機能を有効にし、従来のモデルを超えたSOTAを達成
Apr 11, 2024 am 09:43 AM
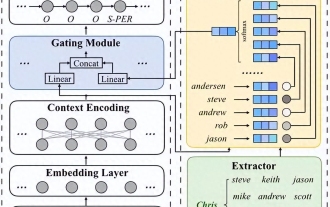
大規模な言語モデルの可能性が刺激され、大規模な言語モデルをトレーニングすることなく高精度の時系列予測を達成でき、従来のすべての時系列モデルを上回ります。モナシュ大学、Ant、IBM Research は共同で、モダリティ全体で配列データを処理する大規模言語モデルの機能を促進する一般的なフレームワークを開発しました。このフレームワークは重要な技術革新となっています。時系列予測は、都市、エネルギー、交通、リモート センシングなどの典型的な複雑なシステムにおける意思決定に役立ちます。それ以来、大規模モデルは時系列/時空間データ マイニングに革命をもたらすと期待されています。一般大規模言語モデル再プログラミング フレームワーク研究チームは、トレーニングなしで一般的な時系列予測に大規模言語モデルを簡単に使用するための一般的なフレームワークを提案しました。主に 2 つの主要なテクノロジが提案されています: タイミング入力再プログラミング、プロンプト プレフィックス。時間-
 GenAI および LLM の技術面接に関する 7 つのクールな質問
Jun 07, 2024 am 10:06 AM
GenAI および LLM の技術面接に関する 7 つのクールな質問
Jun 07, 2024 am 10:06 AM
AIGC について詳しくは、51CTOAI.x コミュニティ https://www.51cto.com/aigc/Translator|Jingyan Reviewer|Chonglou を参照してください。これらの質問は、インターネット上のどこでも見られる従来の質問バンクとは異なります。既成概念にとらわれずに考える必要があります。大規模言語モデル (LLM) は、データ サイエンス、生成人工知能 (GenAI)、および人工知能の分野でますます重要になっています。これらの複雑なアルゴリズムは人間のスキルを向上させ、多くの業界で効率とイノベーションを推進し、企業が競争力を維持するための鍵となります。 LLM は、自然言語処理、テキスト生成、音声認識、推奨システムなどの分野で幅広い用途に使用できます。 LLM は大量のデータから学習することでテキストを生成できます。
 固定的な配置はドキュメント フローから切り離されますか?
Feb 20, 2024 pm 05:24 PM
固定的な配置はドキュメント フローから切り離されますか?
Feb 20, 2024 pm 05:24 PM
固定配置はドキュメント フローから切り離されますか? 特定のコード例が必要です。Web 開発では、レイアウトは非常に重要なトピックです。その中でも、ポジショニングはよく使われるレイアウト手法の 1 つです。 CSS には、静的配置、相対配置、および絶対配置という 3 つの一般的な配置方法があります。これら 3 つの位置決め方法に加えて、スティッキー位置決めという、より特殊な位置決め方法もあります。では、スティッキーな配置はドキュメント フローから切り離されるのでしょうか?以下で詳しく説明し、理解を助けるためにいくつかのコード例を示します。まず、ドキュメント フローとは何かを理解する必要があります
 OpenHarmony で大規模な言語モデルをローカルにデプロイする
Jun 07, 2024 am 10:02 AM
OpenHarmony で大規模な言語モデルをローカルにデプロイする
Jun 07, 2024 am 10:02 AM
この記事は、第 2 回 OpenHarmony テクノロジー カンファレンスで実証された「OpenHarmony での大規模言語モデルのローカル デプロイメント」の結果をオープンソース化します。オープンソースのアドレス: https://gitee.com/openharmony-sig/tpc_c_cplusplus/blob/master/thirdparty。 /InferLLM/docs/hap_integrate.md。実装のアイデアと手順は、軽量 LLM モデル推論フレームワーク InferLLM を OpenHarmony 標準システムに移植し、OpenHarmony 上で実行できるバイナリ製品をコンパイルすることです。 InferLLM はシンプルで効率的な L
 自然言語処理: コンピューターが人間の言語を理解して処理できるようにする
Sep 21, 2023 pm 03:53 PM
自然言語処理: コンピューターが人間の言語を理解して処理できるようにする
Sep 21, 2023 pm 03:53 PM
自然言語処理 (NLP) は、人工知能の分野における重要かつ刺激的なテクノロジーであり、その目標は、コンピューターが人間の言語を理解し、解析し、生成できるようにすることです。 NLP の開発は目覚ましい進歩を遂げ、コンピューターが人間とより適切に対話できるようになり、より広範囲のアプリケーションを実現できるようになりました。この記事では、自然言語処理の概念、テクノロジ、アプリケーション、および将来の展望について説明します。自然言語処理の概念. 自然言語処理は、コンピューターが人間の言語を理解して処理できるようにする方法を研究する学問です。人間の言語の複雑さと曖昧さにより、コンピューターは理解と処理において大きな課題に直面しています。 NLP の目標は、コンピューターがテキストから情報を抽出できるようにするアルゴリズムとモデルを開発することです。
 宏蒙スマートトラベルS9とフルシナリオ新製品発売カンファレンス、多数の大ヒット新製品が一緒にリリースされました
Aug 08, 2024 am 07:02 AM
宏蒙スマートトラベルS9とフルシナリオ新製品発売カンファレンス、多数の大ヒット新製品が一緒にリリースされました
Aug 08, 2024 am 07:02 AM
今日の午後、Hongmeng Zhixingは新しいブランドと新車を正式に歓迎しました。 8月6日、ファーウェイはHongmeng Smart Xingxing S9およびファーウェイのフルシナリオ新製品発表カンファレンスを開催し、パノラマスマートフラッグシップセダンXiangjie S9、新しいM7ProおよびHuawei novaFlip、MatePad Pro 12.2インチ、新しいMatePad Air、Huawei Bisheng Withを発表しました。レーザー プリンタ X1 シリーズ、FreeBuds6i、WATCHFIT3、スマート スクリーン S5Pro など、スマート トラベル、スマート オフィスからスマート ウェアに至るまで、多くの新しいオールシナリオ スマート製品を開発し、ファーウェイは消費者にスマートな体験を提供するフル シナリオのスマート エコシステムを構築し続けています。すべてのインターネット。宏孟志興氏:スマートカー業界のアップグレードを促進するための徹底的な権限付与 ファーウェイは中国の自動車業界パートナーと提携して、
 大規模言語モデルの空間推論能力を刺激する: 思考の視覚化のヒント
Apr 11, 2024 pm 03:10 PM
大規模言語モデルの空間推論能力を刺激する: 思考の視覚化のヒント
Apr 11, 2024 pm 03:10 PM
大規模言語モデル (LLM) は、言語理解とさまざまな推論タスクにおいて優れたパフォーマンスを示します。しかし、人間の認知の重要な側面である空間推論におけるそれらの役割は、依然として十分に研究されていません。人間には、心の目として知られるプロセスを通じて、目に見えない物体や行動の精神的なイメージを作成する能力があり、目に見えない世界を想像することが可能になります。この認知能力に触発されて、研究者らは「思考の視覚化」(VoT)を提案しました。 VoT は、LLM の推論の兆候を視覚化することで LLM の空間推論をガイドし、それによって後続の推論ステップをガイドすることを目的としています。研究者は、自然言語ナビゲーション、視覚などのマルチホップ空間推論タスクに VoT を適用します。
