

オンライン マッピングと軌道予測を緊密に統合するにはどうすればよいですか?

原題: Producing and Leveraging Online Map Uncertainty in Trajectory Prediction
論文リンク: https://arxiv.org/pdf/2403.16439.pdf
コードリンク: https ://github.com/alfredgu001324/MapUncertaintyPrediction
著者の所属: Vector Institute NVIDIA Research、トロント大学、スタンフォード大学
#論文のアイデア:
高精細 (HD) マップは、これに関連する注釈とメンテナンスのコストが高いにもかかわらず、最新の自動運転車 (AV) 技術スタックの開発において不可欠な役割を果たしてきました。したがって、最近の多くの研究では、センサー データから HD マップをオンラインで推定する方法が提案されており、自動運転技術スタックへの統合が複雑になっています。特に、不確実性や信頼度の推定値は生成されません。この論文では、複数の最先端のオンライン地図推定方法を拡張して、不確実性の追加推定を可能にし、実世界の nuScenes 走行データセットの予測力を最大 15% 向上させます。その過程で、不確実性を組み込むことでトレーニングの収束が最大 50% 向上し、現実世界の nuScenes 運転データセットの予測力が最大 15% 向上することがわかりました。
主な貢献:
この論文では、一般的なベクトル化された地図の不確実性の説明を紹介し、多くの最先端のオンライン地図推定方法を拡張して出力の不確実性を追加します。純粋なマッピングのパフォーマンスを低下させることなく推定します。
この論文は、地図の不確実性の潜在的な原因を実証的に分析し、現在の地図推定方法に対する信頼性の欠如を確認し、将来の研究の方向性のための情報を提供します。
この記事では、複数の最先端の軌道予測手法と組み合わせた最近のオンライン地図推定モデルについて説明し、オンライン マッピングの不確実性を組み込むことで下流予測モデルのパフォーマンスとトレーニング特性がどのように大幅に改善されるかを示します。トレーニングの収束を最大 50% 加速し、オンライン予測精度を最大 15% 向上させます。
ネットワーク設計:
自動運転の重要な要素は、自動運転車 (AV) の周囲の道路レイアウトや交通状況などの静的環境を理解することです。したがって、道路境界線、車線分割線、センチメートルレベルの道路標示などの意味情報を含む、そのような情報を取得して提供する高精度 (HD) 地図が開発されました。近年、HD マップは自動運転車の開発と展開に不可欠であることが証明され、現在広く使用されています [35]。ただし、HD マップは、時間の経過とともに注釈を付けて維持するのに費用がかかり、ジオフェンスで囲まれたエリアでのみ使用できるため、自動運転車の拡張性が制限されます。 ”.
これらの問題に対処するために、最近の研究の多くは、センサー データからの高精度 (HD) 地図のオンライン推定に注目しています。大まかに言えば、それらは、通常は地図要素の位置とカテゴリを予測することを目的としています。多角形またはポリラインの形式は、すべてカメラ画像とライダー (LiDAR) スキャンから得られます。しかし、現在のオンライン地図推定方法では、関連する不確実性や信頼性情報が生成されません。これは、下流のユーザー (消費者) が暗黙のうちに仮定することになるため、問題があります。推論された地図コンポーネントは決定論的であり、マッピング エラー (地図要素の不適切な移動や配置など) は下流での誤った動作につながる可能性があるということを目的として、この論文では、オンライン地図推定方法の違いを明らかにすることを提案しています。具体的には、この論文では、地図の不確実性を軌道予測に組み込み、地図の不確実性を組み込んだマッパー予測システム (図 1) が、そうでないシステムよりも優れていることを示しています。
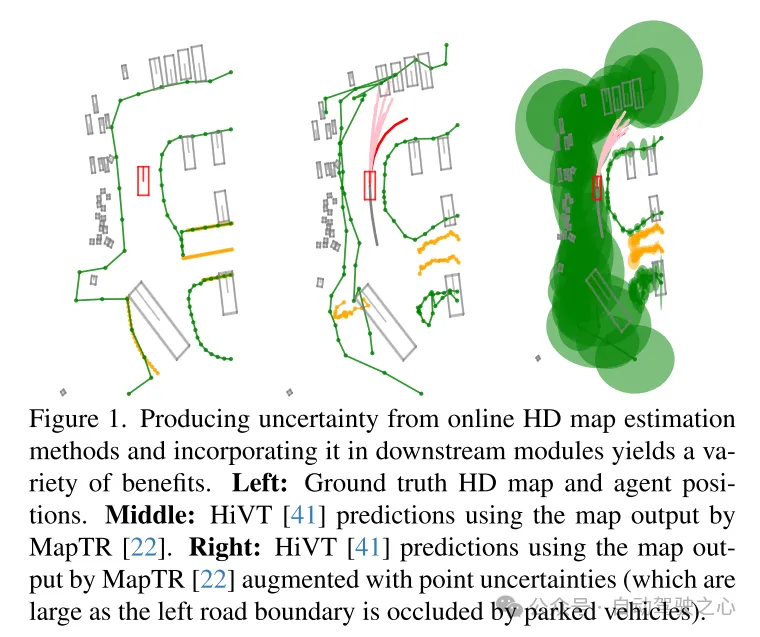
図 1. オンライン高精度 (HD) 地図推定手法から不確実性が生成され、それを下流モジュールに組み込むことでさまざまな利点がもたらされます。リアル HD マップとエージェントの位置 中央: MapTR[22] 出力マップを使用した HiVT[41] 予測 右: MapTR[22] 出力を使用したマップとポイント不確実性を追加した HiVT[41] 予測 (不確実性が大きいため)
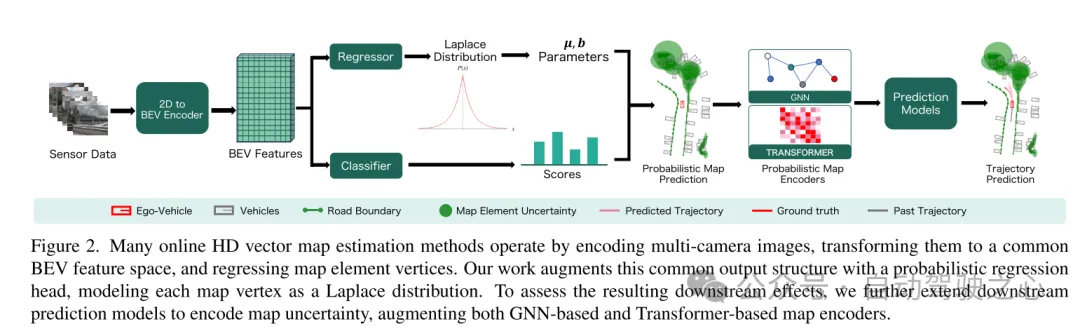
図 2. 多くのオンライン高精度ベクトル地図推定手法は、マルチカメラ画像をエンコードして変換することによって機能します。共通の鳥瞰図 (BEV) 特徴空間に変換し、マップ要素の頂点を回帰します。私たちの研究では、確率回帰ヘッドを追加することでこれを行います。この共通の出力構造は、各マップの頂点をラプラシアン分布としてモデル化することによって強化されます。結果として生じる下流の影響に対処するため、この論文では下流の予測モデルをさらに拡張してマップの不確実性をエンコードし、グラフ ニューラル ネットワーク (GNN) とトランスフォーマー ベースのマップ エンコーダを強化します。
実験結果:
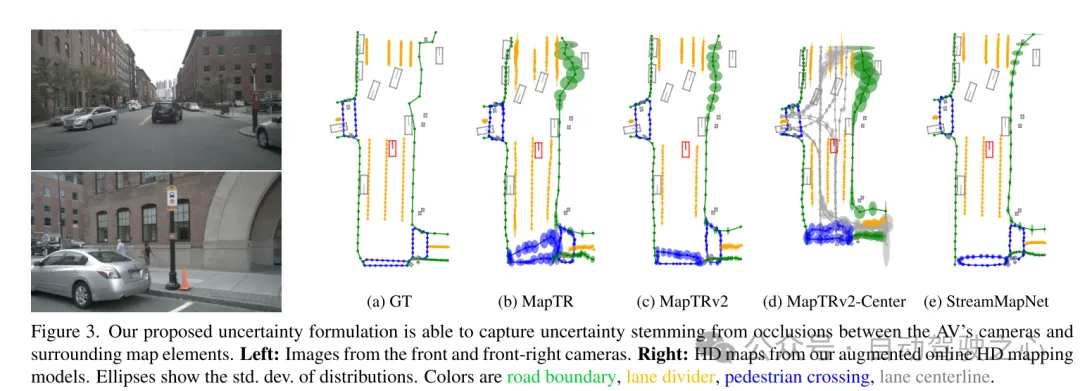
図 3. この記事で提案する不確実性表現は、自動運転車 (AV) のカメラ間の違いを捉えることができます。 ) と周囲の環境 マップ要素間のオクルージョンによる不確実性。左: フロントカメラとフロント右カメラからの画像。右: この記事で強化されたオンライン高精度地図モデルによって生成された HD 地図。楕円は分布の標準偏差を表します。色は、道路の境界、車線分離帯、横断歩道、車線の中心線を表します。
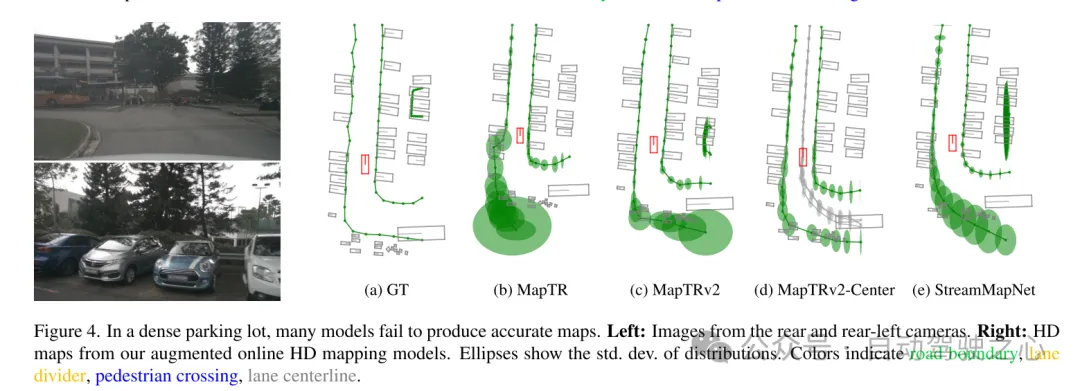
# 図 4. 密集した駐車場では、多くのモデルが正確なマップを生成できません。左: リアおよびリア左カメラの画像。右: この記事で強化されたオンライン高精度地図モデルによって生成された HD 地図。楕円は分布の標準偏差を示します。色は、道路の境界線、車線分割線、横断歩道、車線の中心線を表します。
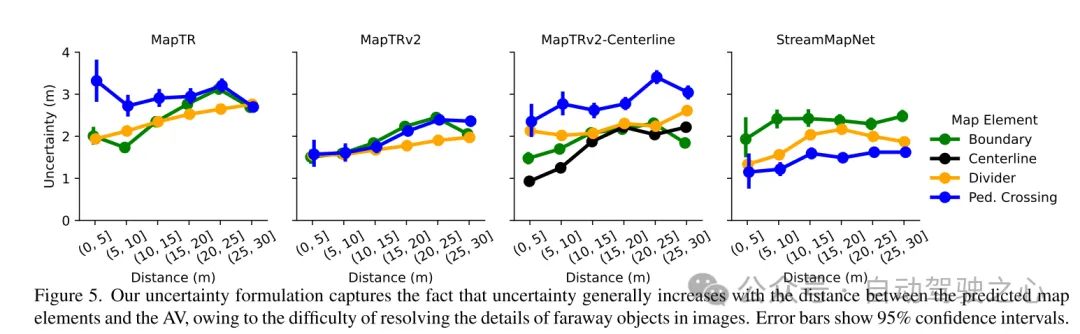
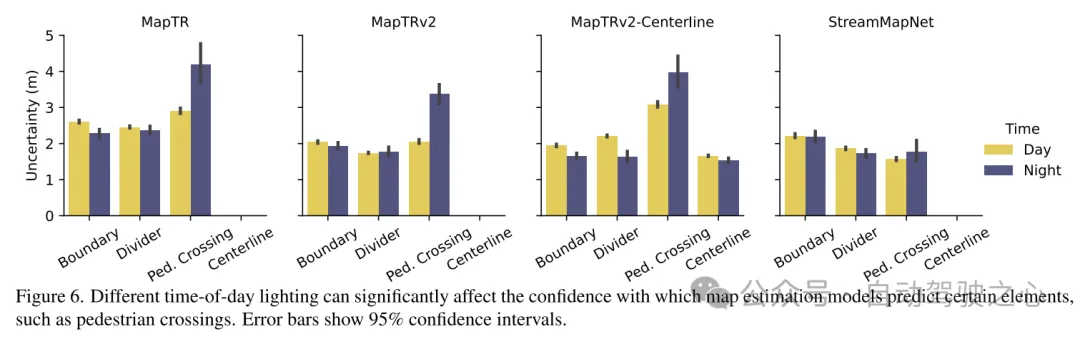
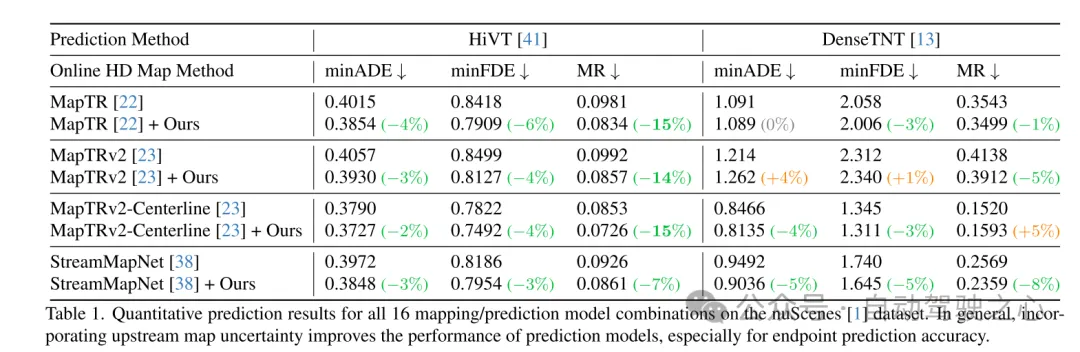
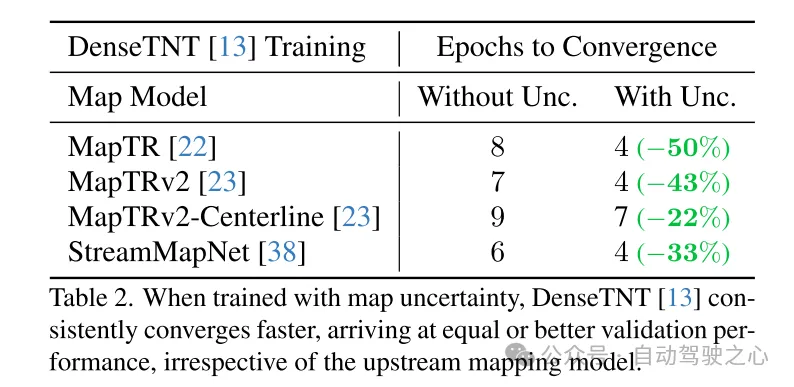
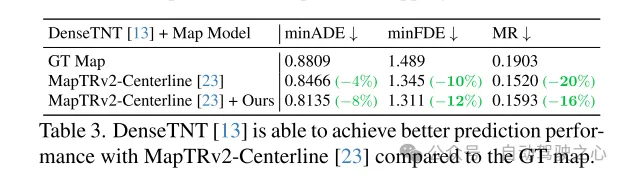
この論文では、一般的なベクトル化された地図の不確実性公式を提案し、MapTR [22]、MapTRv2 [23]、StreamMapNet [38] などのさまざまな最新のオンライン地図推定方法を拡張します。不確実性をさらに出力できるようになります。私たちは結果として生じる不確実性を体系的に分析し、私たちのアプローチが多くの不確実性の原因 (オクルージョン、カメラからの距離、時刻、天候) を捉えていることを発見しました。最後に、この論文は、これらのオンライン地図推定モデルを最先端の軌道予測方法 (DenseTNT [13] および HiVT [41]) と組み合わせ、オンライン地図の不確実性を組み込むことで予測モデルのパフォーマンスとトレーニング特性が大幅に向上することを示します。それぞれ、最大 15% と 50%。将来の興味深い研究の方向性は、これらの不確実性出力を使用して地図モデルの校正を測定することです ([16] と同様)。ただし、このタスクは、ファジー点セットのマッチングが必要なため複雑になり、それ自体が困難な問題です。
引用:Gu X、Song G、Gilitschenski I 他、軌道予測におけるオンライン マップの不確実性の生成と活用[J]. arXiv プレプリント arXiv:2403.16439 、2024.
以上がオンライン マッピングと軌道予測を緊密に統合するにはどうすればよいですか?の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7465
7465
 15
1376
52
77
11
18
19
15
1376
52
77
11
18
19

 なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
上記と著者の個人的な理解 3 次元ガウシアンプラッティング (3DGS) は、近年、明示的な放射線フィールドとコンピューター グラフィックスの分野で出現した革新的なテクノロジーです。この革新的な方法は、数百万の 3D ガウスを使用することを特徴とし、主に暗黙的な座標ベースのモデルを使用して空間座標をピクセル値にマッピングする神経放射線場 (NeRF) 方法とは大きく異なります。明示的なシーン表現と微分可能なレンダリング アルゴリズムにより、3DGS はリアルタイム レンダリング機能を保証するだけでなく、前例のないレベルの制御とシーン編集も導入します。これにより、3DGS は、次世代の 3D 再構築と表現にとって大きな変革をもたらす可能性のあるものとして位置付けられます。この目的を達成するために、私たちは 3DGS 分野における最新の開発と懸念について初めて体系的な概要を提供します。
 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
0.前面に書かれています&& 自動運転システムは、さまざまなセンサー (カメラ、ライダー、レーダーなど) を使用して周囲の環境を認識し、アルゴリズムとモデルを使用することにより、高度な知覚、意思決定、および制御テクノロジーに依存しているという個人的な理解リアルタイムの分析と意思決定に。これにより、車両は道路標識の認識、他の車両の検出と追跡、歩行者の行動の予測などを行うことで、安全な運行と複雑な交通環境への適応が可能となり、現在広く注目を集めており、将来の交通分野における重要な開発分野と考えられています。 。 1つ。しかし、自動運転を難しくしているのは、周囲で何が起こっているかを車に理解させる方法を見つけることです。これには、自動運転システムの 3 次元物体検出アルゴリズムが、周囲環境にある物体 (位置を含む) を正確に認識し、記述することができる必要があります。
 座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
最初のパイロットおよび重要な記事では、主に自動運転技術で一般的に使用されるいくつかの座標系と、それらの間の相関と変換を完了し、最終的に統合環境モデルを構築する方法を紹介します。ここでの焦点は、車両からカメラの剛体への変換 (外部パラメータ)、カメラから画像への変換 (内部パラメータ)、および画像からピクセル単位への変換を理解することです。 3D から 2D への変換には、対応する歪み、変換などが発生します。要点:車両座標系とカメラ本体座標系を平面座標系とピクセル座標系に書き換える必要がある 難易度:画像の歪みを考慮する必要がある 歪み補正と歪み付加の両方を画面上で補正する2. はじめに ビジョンシステムには、ピクセル平面座標系 (u, v)、画像座標系 (x, y)、カメラ座標系 ()、世界座標系 () の合計 4 つの座標系があります。それぞれの座標系には関係性があり、
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
原題: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving 論文リンク: https://arxiv.org/pdf/2402.02519.pdf コードリンク: https://github.com/HKUST-Aerial-Robotics/SIMPL 著者単位: 香港科学大学DJI 論文のアイデア: この論文は、自動運転車向けのシンプルで効率的な動作予測ベースライン (SIMPL) を提案しています。従来のエージェントセントとの比較
 nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
先頭と開始点に書かれている エンドツーエンドのパラダイムでは、統一されたフレームワークを使用して自動運転システムのマルチタスクを実現します。このパラダイムの単純さと明確さにも関わらず、サブタスクにおけるエンドツーエンドの自動運転手法のパフォーマンスは、依然としてシングルタスク手法に比べてはるかに遅れています。同時に、以前のエンドツーエンド手法で広く使用されていた高密度鳥瞰図 (BEV) 機能により、より多くのモダリティやタスクに拡張することが困難になります。ここでは、スパース検索中心のエンドツーエンド自動運転パラダイム (SparseAD) が提案されています。このパラダイムでは、スパース検索は、高密度の BEV 表現を使用せずに、空間、時間、タスクを含む運転シナリオ全体を完全に表します。具体的には、統合されたスパース アーキテクチャが、検出、追跡、オンライン マッピングなどのタスク認識のために設計されています。さらに、重い
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
