

清華の最新作! RoadBEV: BEV で路面の再構築をどのように実現するか?

Original title: RoadBEV: Road Surface Reconstruction in Bird's Eye View
Paper link: https://arxiv.org/pdf/2404.06605.pdf
Code link: https ://github.com/ztsrxh/RoadBEV
Author affiliation: Tsinghua University, University of California, Berkeley
## Paper idea:
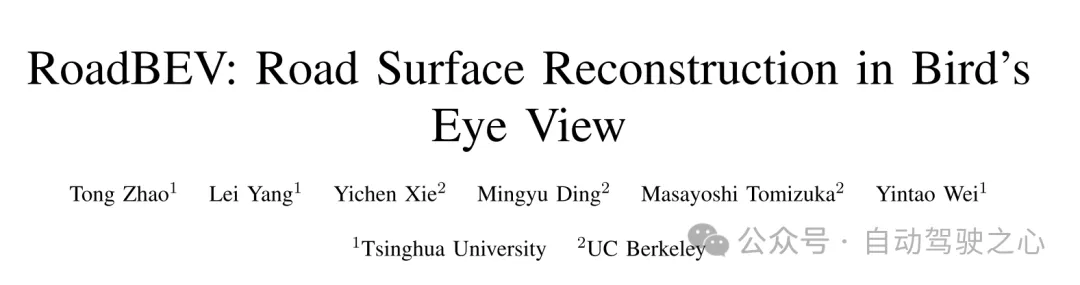
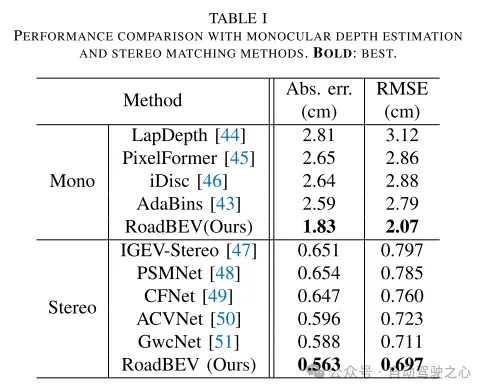
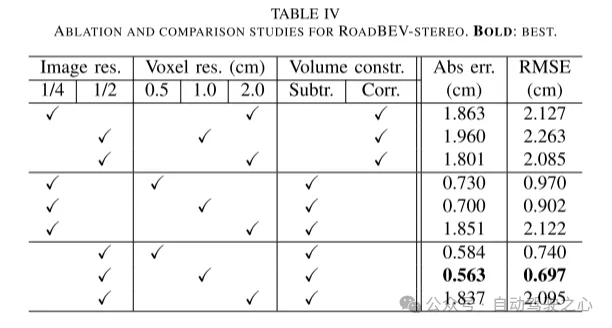
Road surface conditions, especially geometric contours, greatly affect the driving ability of autonomous vehicles. Vision-based online road reconstruction is expected to capture road information in advance. Existing solutions such as monocular depth estimation and stereo vision estimation have their limitations. Recent bird's-eye view (BEV) perception technology provides tremendous motivation for more reliable and accurate reconstruction. This paper uniformly proposes two effective BEV road elevation reconstruction models, named RoadBEV-mono and RoadBEV-stereo respectively, which are different from the use of monocular and binocular images for road elevation estimation. The former estimates road elevation directly from a single image, while the latter estimates road elevation using left and right volumetric views. In-depth analysis reveals their consistency and differences with the perspectives. Experiments on real-world datasets demonstrate the effectiveness and superiority of the model. The elevation errors of RoadBEV-mono and RoadBEV-stereo are 1.83 meters and 0.56 meters respectively. The performance of BEV estimation based on monocular images is improved by 50%. The model in this article is expected to provide a valuable reference in vision-based autonomous driving technology.Main contributions:
This paper demonstrates for the first time the necessity and superiority of road surface reconstruction from a bird's-eye perspective from both theoretical and experimental aspects. This article introduces two models, named RoadBEV-mono and RoadBEV-stereo. For monocular and stereo based schemes, this article explains their mechanisms in detail. This paper comprehensively tests and analyzes the performance of the proposed model, providing valuable insights and prospects for future research.Network Design:
In recent years, the rapid development of unmanned ground vehicles (UGVs) has put forward higher requirements for vehicle-mounted perception systems. Real-time understanding of the driving environment and conditions is crucial for accurate motion planning and control [1]-[3]. For vehicles, roads are the only medium of contact with the physical world. Road surface conditions determine many vehicle characteristics and drivability [4]. As shown in Figure 1(a), road irregularities, such as bumps and potholes, will exacerbate the riding experience of the vehicle, which is intuitively perceptible. Real-time road surface condition perception, especially geometric elevation, greatly helps improve ride comfort [5], [6]. Compared with other perception tasks in unmanned ground vehicles (UGVs) such as segmentation and detection, road surface reconstruction (RSR) is an emerging technology that has received increasing attention recently. Similar to existing perception processes, RSR typically utilizes onboard LiDAR and camera sensors to retain road surface information. LiDAR directly scans road contours and derives point clouds [7], [8]. Road elevation on vehicle trajectories can be extracted directly without complex algorithms. However, the high cost of lidar sensors limits their application in economical mass-produced vehicles. Unlike larger traffic objects such as vehicles and pedestrians, road irregularities are typically small in magnitude, so the accuracy of the point cloud is critical. Motion compensation and filtering are required on real-time road scanning, which further requires high-precision positioning at the centimeter level. Image-based road surface reconstruction (RSR), as a three-dimensional vision task, is more promising than LiDAR in terms of accuracy and resolution. It also retains the road surface texture, making the road perception more comprehensive. Vision-based road elevation reconstruction is actually a depth estimation problem. For monocular cameras, monocular depth estimation can be implemented based on a single image, or multi-view stereo (MVS) can be implemented based on sequences to directly estimate depth [9]. For binocular cameras, binocular matching regresses disparity maps, which can be converted to depth [10], [11]. Given the camera parameters, the road point cloud in the camera coordinate system can be recovered. Through a preliminary post-processing process, road structure and elevation information are finally obtained. Under the guidance of ground-truth (GT) labels, high-precision and reliable RSR can be achieved.However, road surface reconstruction (RSR) from the image perspective has inherent shortcomings. The depth estimation for a specific pixel is actually to find optimal bins along the direction perpendicular to the image plane (shown as the orange point in Figure 1(b)). There is a certain angular deviation between the depth direction and the road surface. Changes and trends in road profile features are inconsistent with changes and trends in the search direction. Information cues about road elevation changes are sparse in the depth view. Furthermore, the depth search range is the same for each pixel, causing the model to capture global geometric hierarchy rather than local surface structure. Due to the global but coarse depth search, fine road elevation information is destroyed. Since this paper focuses on elevation in the vertical direction, the effort in the depth direction is wasted. In perspective views, texture details at long distances are lost, which further poses challenges for efficient depth regression unless further a priori constraints are introduced [12].
Estimating road elevation from a top view (i.e., bird's eye view, BEV) is a natural idea because elevation essentially describes vibrations in the vertical direction. Bird's eye view is an effective paradigm for representing multi-modal and multi-view data in unified coordinates [13], [14]. Recent state-of-the-art performance on 3D object detection and segmentation tasks was achieved by approaches based on bird's-eye views [15], as opposed to perspective views, which are performed by introducing estimated heads on view-transformed image features. Figure 1 illustrates the motivation for this paper. Instead of focusing on the global structure in the image view, the reconstruction in the bird's-eye view directly identifies road features within a specific small range in the vertical direction. Road features projected in a bird's-eye view densely reflect structural and contour changes, facilitating efficient and refined searches. The influence of perspective effects is also suppressed because roads are represented uniformly on a plane perpendicular to the viewing angle. Road reconstruction based on bird's-eye view features is expected to achieve higher performance.
This paper reconstructs the road surface under BEV to solve the problems identified above. In particular, this paper focuses on road geometry, namely elevation. In order to utilize monocular and binocular images and demonstrate the broad feasibility of bird's-eye view perception, this paper proposes two sub-models named RoadBEV-mono and RoadBEV-stereo. Following the paradigm of a bird's eye view, this paper defines voxels of interest covering potential road relief. These voxels query pixel features through 3D-2D projection. For RoadBEV-mono, this paper introduces a height estimation head on the reshaped voxel features. The structure of RoadBEV-stereo is consistent with binocular matching in image views. Based on the left and right voxel features, a 4D cost volume is constructed in the bird's-eye view, which is aggregated through 3D convolution. Elevation regression is considered as a classification of predefined bins to enable more efficient model learning. This paper validates these models on a real-world dataset previously published by the authors, showing that they have huge advantages over traditional monocular depth estimation and stereo matching methods.
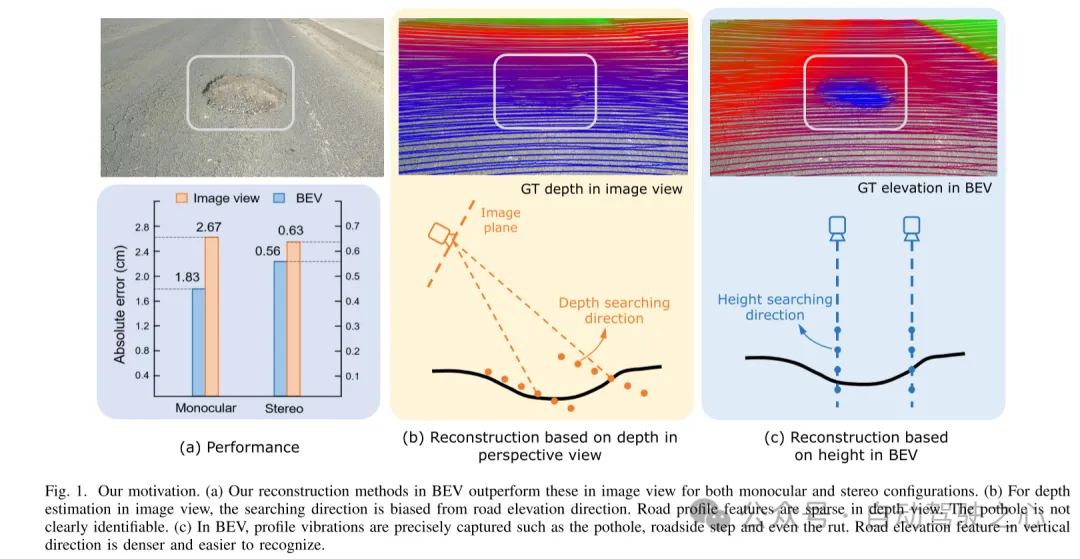
Figure 1. Motivation for this article. (a) Regardless of monocular or binocular configuration, our reconstruction method in bird's-eye view (BEV) outperforms the method in image view. (b) When performing depth estimation in the image view, the search direction is biased from the road elevation direction. In the depth view, road outline features are sparse. Potholes are not easily identified. (c) In a bird's-eye view, contour vibrations such as potholes, curb steps and even ruts can be accurately captured. Road elevation features in the vertical direction are denser and easier to identify.
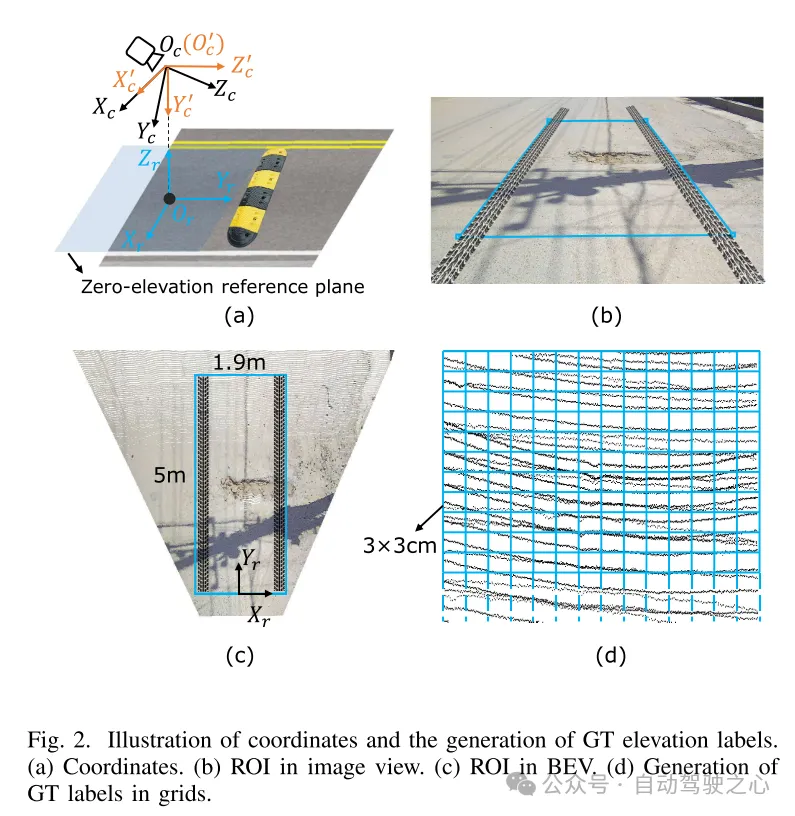
Figure 2. Coordinate representation and generation of true value (GT) elevation labels. (a) Coordinates (b) Region of interest (ROI) in image view (c) Region of interest (ROI) in bird's eye view (d) Generating ground truth (GT) labels in grid
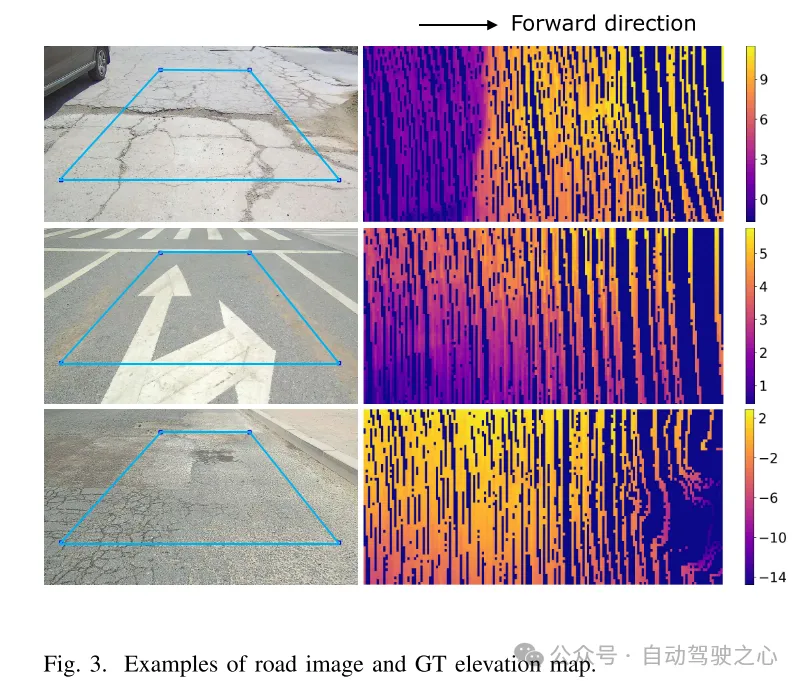
Figure 3. Example of road image and ground truth (GT) elevation map.
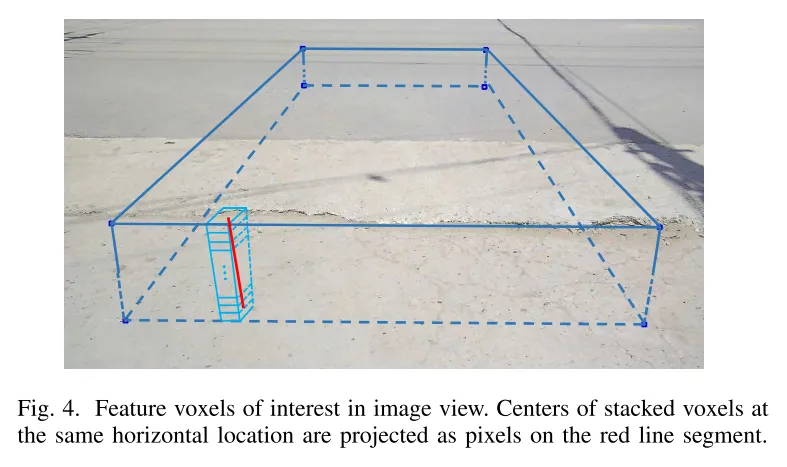
Figure 4. Feature voxels of interest in image view. The centers of stacked voxels located at the same horizontal position are projected to pixels on the red line segment.
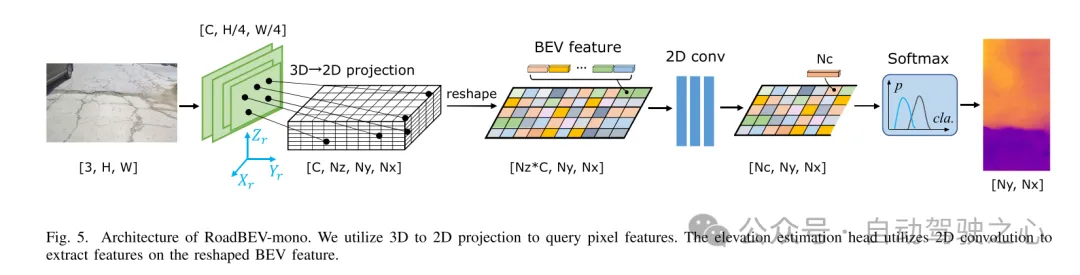
Figure 5. Architecture of RoadBEV-mono. This paper uses 3D to 2D projection to query pixel features. The elevation estimation head uses 2D convolution to extract features on the reshaped Bird's Eye View (BEV) features.
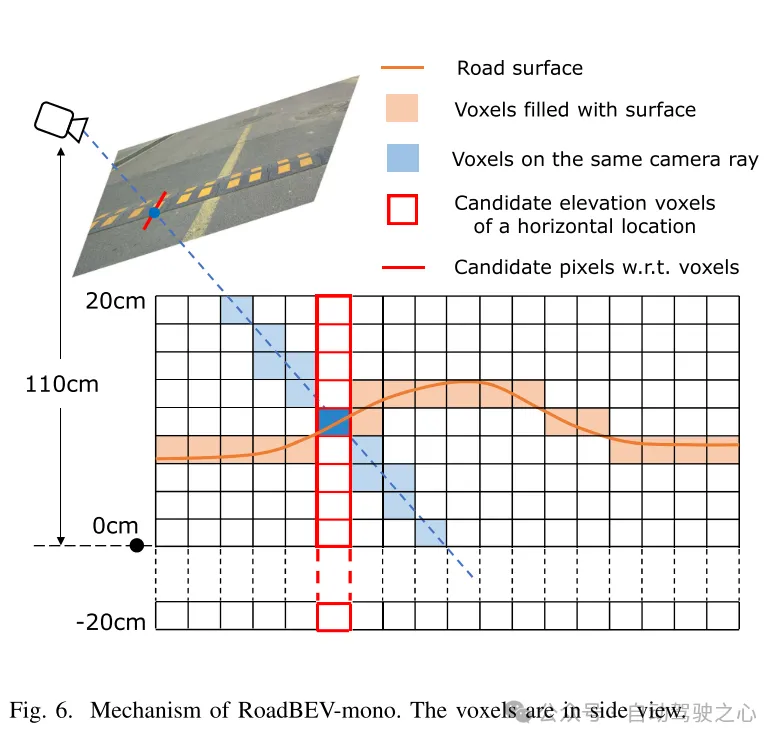
図6. RoadBEV-monoの仕組み。ボクセルは側面図で表示されます。
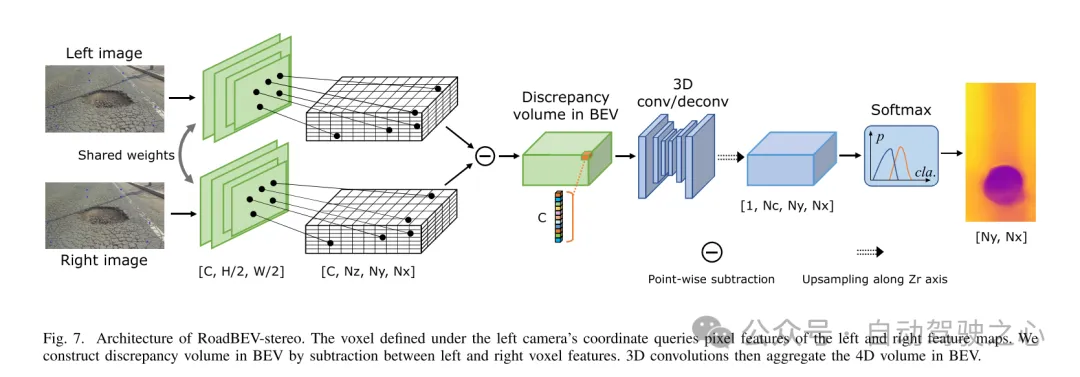
図 7. RoadBEV ステレオ アーキテクチャ。左カメラ座標系で定義されたボクセルは、左右の特徴マップのピクセル特徴を照会します。この論文では、左右のボクセル特徴間の減算を通じて鳥瞰図 (BEV) の差分ボリュームを構築します。次に、3D コンボリューションにより、鳥瞰図で 4D ボリュームが集約されます。
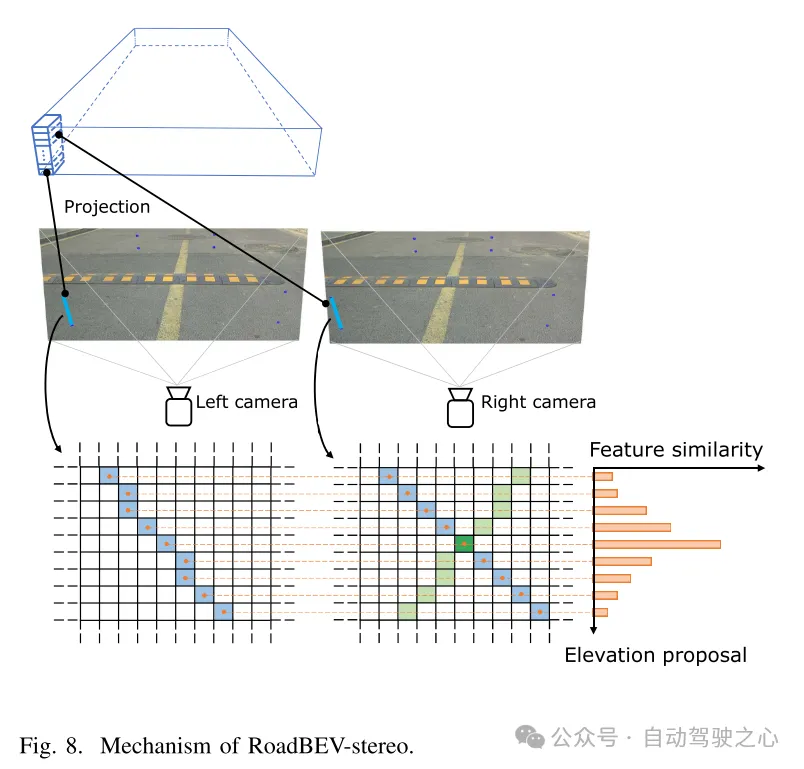
図 8. RoadBEV ステレオのメカニズム。
実験結果:
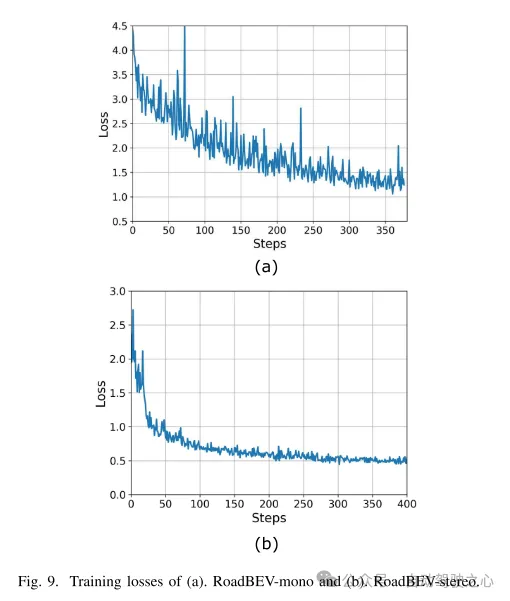
図 9. (a) RoadBEV モノラルと (b) RoadBEV ステレオのトレーニング損失。
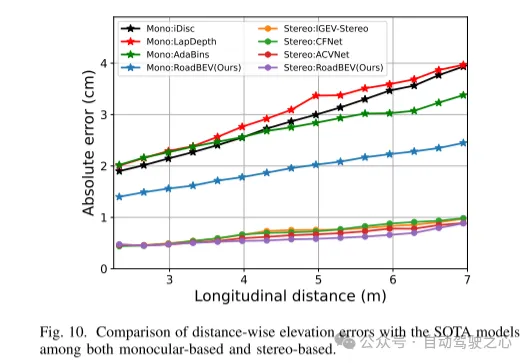
図 10. 単眼と両眼に基づく SOTA モデルとの距離方向の標高誤差の比較。
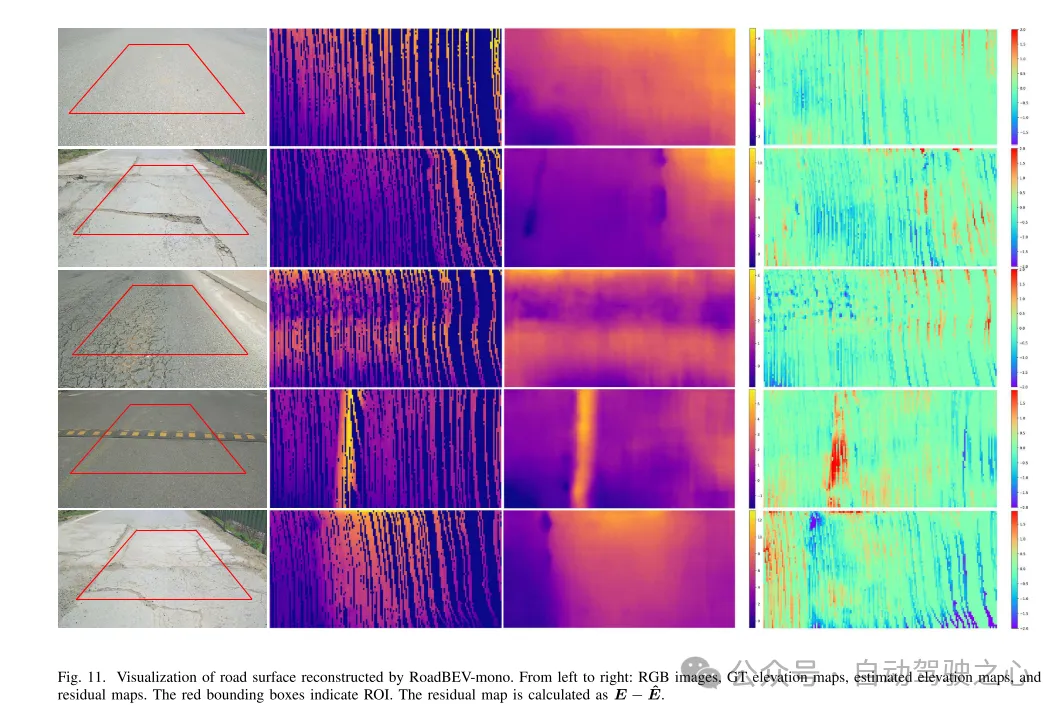
図 11. RoadBEV-mono によって再構築された路面の可視化。
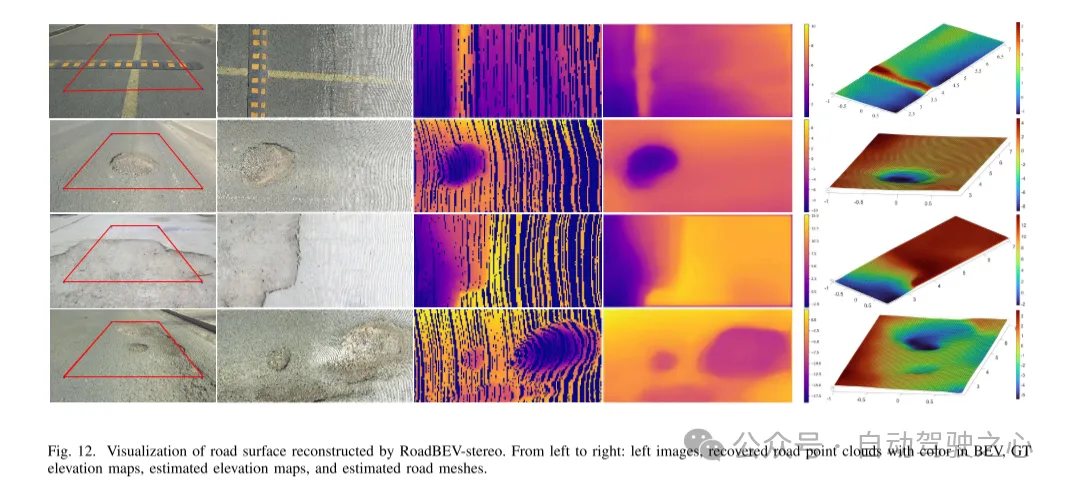
図 12. RoadBEV ステレオによって再構築された路面の視覚化。
要約:
本稿では初めて路面の高さを鳥瞰図で再現しました。この論文では、それぞれ RoadBEV-mono と RoadBEV-stereo と名付けられた、単眼画像と両眼画像に基づく 2 つのモデルを提案し、分析します。この論文では、BEV における単眼推定と両眼マッチングは透視図と同じメカニズムであり、探索範囲を狭め、標高方向に直接特徴をマイニングすることで改善されることを発見しました。現実世界のデータセットでの包括的な実験により、提案された BEV ボリューム、推定ヘッド、パラメーター設定の実現可能性と優位性が検証されます。単眼カメラの場合、BEV での再構成パフォーマンスは、透視図と比較して 50% 向上します。同時に、BEVでは、双眼カメラを使用した場合の性能が単眼カメラの3倍になります。この記事では、モデルに関する詳細な分析とガイダンスを提供します。この記事の画期的な探求は、BEV 知覚、3D 再構成、および 3D 検出に関連するさらなる研究と応用のための貴重な参考資料も提供します。
以上が清華の最新作! RoadBEV: BEV で路面の再構築をどのように実現するか?の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7814
7814
 15
1646
14
1402
52
1300
25
1238
29
15
1646
14
1402
52
1300
25
1238
29

 gitでコードを更新する方法
Apr 17, 2025 pm 04:45 PM
gitでコードを更新する方法
Apr 17, 2025 pm 04:45 PM
GITコードを更新する手順:コードをチェックしてください:gitクローンhttps://github.com/username/repo.git最新の変更を取得:gitフェッチマージの変更:gitマージオリジン/マスタープッシュ変更(オプション):gitプッシュオリジンマスター
 Gitプロジェクトをローカルにダウンロードする方法
Apr 17, 2025 pm 04:36 PM
Gitプロジェクトをローカルにダウンロードする方法
Apr 17, 2025 pm 04:36 PM
gitを介してローカルにプロジェクトをダウンロードするには、次の手順に従ってください。gitをインストールします。プロジェクトディレクトリに移動します。次のコマンドを使用してリモートリポジトリのクローニング:git clone https://github.com/username/repository-name.git
 gitコミットの使用方法
Apr 17, 2025 pm 03:57 PM
gitコミットの使用方法
Apr 17, 2025 pm 03:57 PM
GITコミットは、プロジェクトの現在の状態のスナップショットを保存するために、ファイルの変更をGITリポジトリに記録するコマンドです。使用方法は次のとおりです。一時的なストレージエリアに変更を追加する簡潔で有益な提出メッセージを書き込み、送信メッセージを保存して終了して送信を完了します。
 Gitダウンロードがアクティブでない場合はどうすればよいですか
Apr 17, 2025 pm 04:54 PM
Gitダウンロードがアクティブでない場合はどうすればよいですか
Apr 17, 2025 pm 04:54 PM
解決:gitのダウンロード速度が遅い場合、次の手順を実行できます。ネットワーク接続を確認し、接続方法を切り替えてみてください。 GIT構成の最適化:ポストバッファーサイズ(Git Config -Global HTTP.Postbuffer 524288000)を増やし、低速制限(GIT Config -Global HTTP.LowsPeedLimit 1000)を減らします。 Gitプロキシ(Git-ProxyやGit-LFS-Proxyなど)を使用します。別のGitクライアント(SourcetreeやGithubデスクトップなど)を使用してみてください。防火を確認してください
 gitでコードをマージする方法
Apr 17, 2025 pm 04:39 PM
gitでコードをマージする方法
Apr 17, 2025 pm 04:39 PM
gitコードマージプロセス:競合を避けるために最新の変更を引き出します。マージするブランチに切り替えます。マージを開始し、ブランチをマージするように指定します。競合のマージ(ある場合)を解決します。ステージングとコミットマージ、コミットメッセージを提供します。
 Gitでローカルコードを更新する方法
Apr 17, 2025 pm 04:48 PM
Gitでローカルコードを更新する方法
Apr 17, 2025 pm 04:48 PM
ローカルGitコードを更新する方法は? Git Fetchを使用して、リモートリポジトリから最新の変更を引き出します。 Git Merge Origin/<リモートブランチ名>を使用して、地元のブランチへのリモート変更をマージします。合併から生じる競合を解決します。 Git Commit -M "Merge Branch< Remote Branch Name>"を使用してください。マージの変更を送信し、更新を適用します。
 PHPプロジェクトで効率的な検索問題を解決する方法は?タイプセンスはあなたがそれを達成するのに役立ちます!
Apr 17, 2025 pm 08:15 PM
PHPプロジェクトで効率的な検索問題を解決する方法は?タイプセンスはあなたがそれを達成するのに役立ちます!
Apr 17, 2025 pm 08:15 PM
eコマースのウェブサイトを開発するとき、私は困難な問題に遭遇しました:大量の製品データで効率的な検索機能を達成する方法は?従来のデータベース検索は非効率的であり、ユーザーエクスペリエンスが低いです。いくつかの調査の後、私は検索エンジンタイプセンスを発見し、公式のPHPクライアントタイプセンス/タイプセンス-PHPを通じてこの問題を解決し、検索パフォーマンスを大幅に改善しました。
 GITでリポジトリを削除する方法
Apr 17, 2025 pm 04:03 PM
GITでリポジトリを削除する方法
Apr 17, 2025 pm 04:03 PM
gitリポジトリを削除するには、次の手順に従ってください。削除するリポジトリを確認します。リポジトリのローカル削除:RM -RFコマンドを使用して、フォルダーを削除します。倉庫をリモートで削除する:倉庫の設定に移動し、「倉庫の削除」オプションを見つけて、操作を確認します。
