

BEVFormerを超えて! CR3DT: RV フュージョンは新しい SOTA (ETH) の 3D 検出と追跡を支援します

前書き&筆者の個人的理解
この記事では、3D ターゲット検出とマルチターゲット追跡のためのカメラとミリ波レーダーの融合法 (CR3DT) を紹介します。 LIDAR ベースの手法はこの分野に高い基準を設定していますが、その高いコンピューティング能力と高コストにより、カメラベースの 3D ターゲット検出および追跡ソリューションの自動運転分野でのこのソリューションの開発は制限されています。コストが比較的低く、多くの学者の注目を集めていますが、結果が芳しくないためです。そこで、カメラとミリ波レーダーの融合が有力な解決策となりつつあります。既存のカメラ フレームワーク BEVDet の下で、ミリ波レーダーの空間情報と速度情報を融合し、それを CC-3DT トラッキング ヘッドと組み合わせることで、3D ターゲットの検出と追跡の精度が大幅に向上し、性能とコストの矛盾が解消されます。
主な貢献
センサー フュージョン アーキテクチャ 提案された CR3DT は、BEV エンコーダの前後で中間フュージョン テクノロジを使用します。ミリ波レーダーデータ。追跡には、準高密度アピアランス埋め込みヘッドが使用され、ターゲット関連付けにミリ波レーダー速度推定が使用されます。
検出パフォーマンス評価 CR3DT は、nuScenes 3D 検出検証セットで 35.1% の mAP と 45.6% の nuScenes 検出スコア (NDS) を達成しました。レーダー データに含まれる豊富な速度情報を利用して、検出器の平均速度誤差 (mAVE) は、SOTA カメラ検出器と比較して 45.3% 削減されます。
追跡パフォーマンスの評価 nuScenes 追跡検証セットにおける CR3DT の追跡パフォーマンスは 38.1% AMOTA であり、カメラのみを使用した SOTA 追跡モデルと比較して AMOTA が向上しています。 14.9%、トラッカーでの速度情報の明示的な使用とさらなる改善により、IDS の数が約 43% 大幅に減少しました。
モデル アーキテクチャ
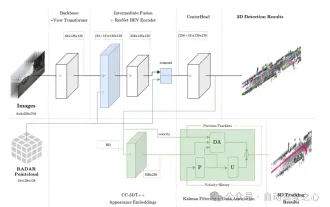
この方法は EV-Det フレームワークに基づいており、RADAR の空間情報と速度情報を統合し、付属の CC-3DT トラッキング ヘッドを組み合わせます。データ関連付けでは、改良されたミリ波レーダーを使用して検出器の速度推定を強化し、最終的に 3D ターゲットの検出と追跡を可能にします。
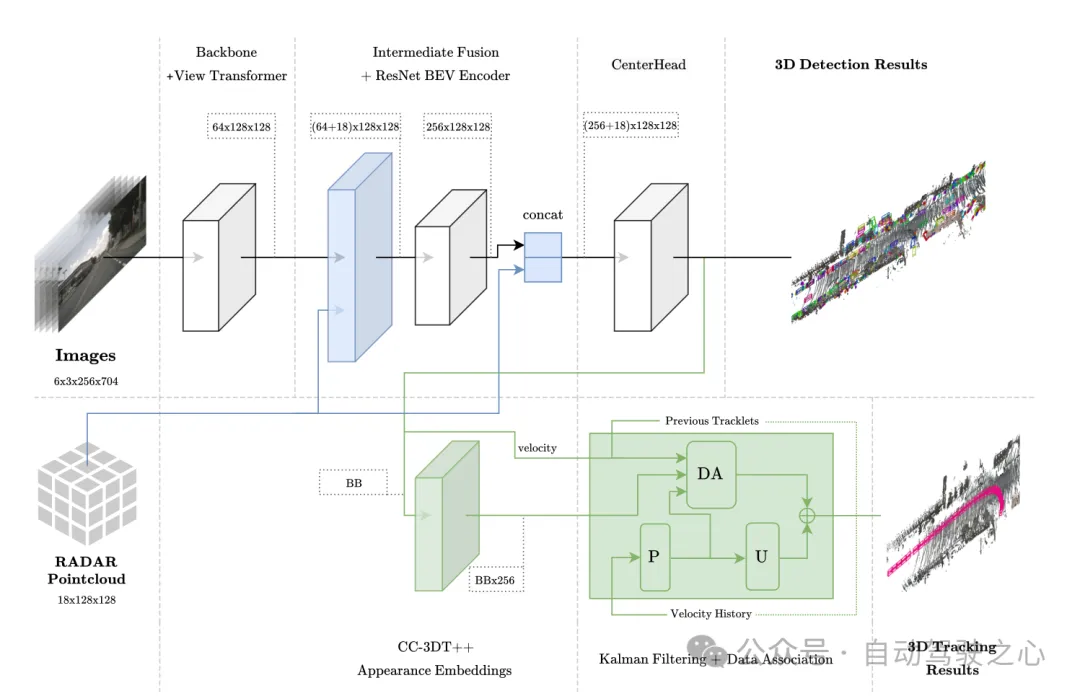 図 1 全体的なアーキテクチャ。検出と追跡はそれぞれ水色と緑色で強調表示されます。
図 1 全体的なアーキテクチャ。検出と追跡はそれぞれ水色と緑色で強調表示されます。
BEV 空間におけるセンサー融合
このモジュールは、内部の集約と接続を含む、PointPillars と同様の融合手法を採用しています。 BEV グリッドは、解像度 0.8 で [-51.2, 51.2] に設定され、(128×128) フィーチャ グリッドになります。画像特徴を BEV 空間に直接投影すると、各グリッド ユニットのチャネル数は 64 になり、画像 BEV 特徴は同様に各 In に集約されます。グリッド単位。これにはポイントの x、y、z 座標が含まれます。レーダー データには拡張は行われません。著者は、レーダー点群にはすでに LiDAR 点群よりも多くの情報が含まれていることを確認したため、レーダー BEV 特徴は (18×128×128) になります。最後に、画像 BEV 特徴 (64×128×128) とレーダー BEV 特徴 (18×128×128) は、BEV 特徴符号化層の入力として直接接続されます ((64 18)×128×128)。その後のアブレーション実験では、(256×128×128) の寸法で BEV 特徴エンコード層の出力に残留接続を追加すると有益であることが判明しました。その結果、CenterPoint 検出ヘッドの最終入力サイズは ( (256 18)×128×128)。

図 2 核融合操作のために BEV 空間に集約されたレーダー点群の視覚化
追跡モジュールのアーキテクチャ
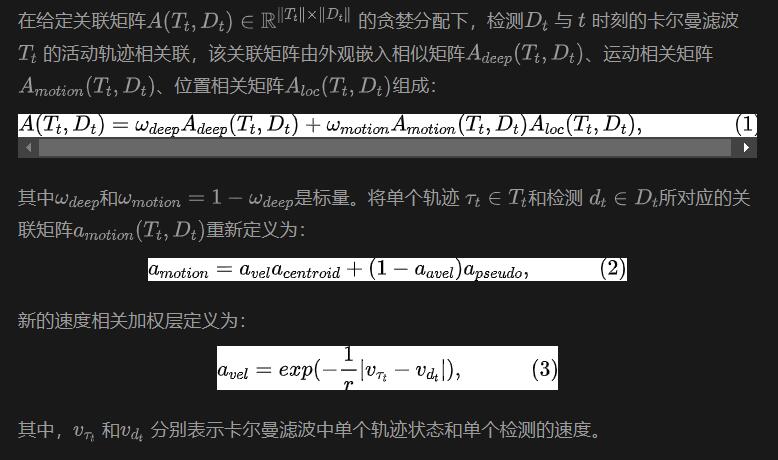
追跡動きの相関性と視覚的特徴の類似性に基づいて、2 つの異なるフレーム内のターゲットを関連付けます。トレーニング プロセス中に、準高密度多変量ポジティブ コントラスト学習を通じて 1 次元の視覚特徴埋め込みベクトルが取得され、CC-3DT の追跡段階で検出と特徴埋め込みが同時に使用されます。データ関連付けステップ (図 1 の DA モジュール) は、改良された CR3DT 位置検出と速度推定を利用するように変更されました。詳細は次のとおりです:
実験と結果
は nuScenes データセットに基づいて完了しましたが、すべてのトレーニングが完了したわけではありません。 CBGSを使用します。
制限付きモデル
作成者は 3090 グラフィックス カードを搭載したコンピューターでモデル全体を実行したため、これは制限付きモデルと呼ばれます。このモデルのターゲット検出部分は検出ベースラインとして BEVDet を使用し、画像エンコード バックボーンは ResNet50 に設定され、画像入力は (3×256×704) に設定されます。モデルでは過去または未来の時間画像情報は使用されません。バッチサイズは 8 に設定されます。レーダー データのまばらさを軽減するために、5 回のスキャンを使用してデータを強化します。融合モデルでは追加の時間情報は使用されません。
ターゲット検出の場合は、mAP、NDS、および mAVE のスコアを使用して評価し、追跡の場合は、AMOTA、AMOTP、および IDS を使用して評価します。
オブジェクト検出結果
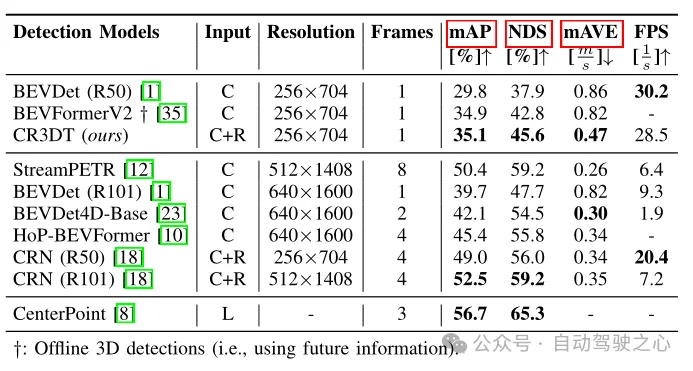
表 1 nuScenes 検証セットの検出結果
表 1 は、CR3DT と CR3DT の違いを示しています。カメラを使用したベースライン BEVDet (R50) アーキテクチャと比較した検出パフォーマンスのみ。 Radar を追加すると、検出性能が大幅に向上することは明らかです。小さな解像度と時間枠の制約の下で、CR3DT はカメラのみの BEVDet と比較して 5.3% の mAP と 7.7% の NDS の向上に成功しました。しかし、計算能力の限界により、この論文では高解像度、マージ時間情報などの実験結果は得られませんでした。さらに、推論時間も表 1 の最後の列に示されています。
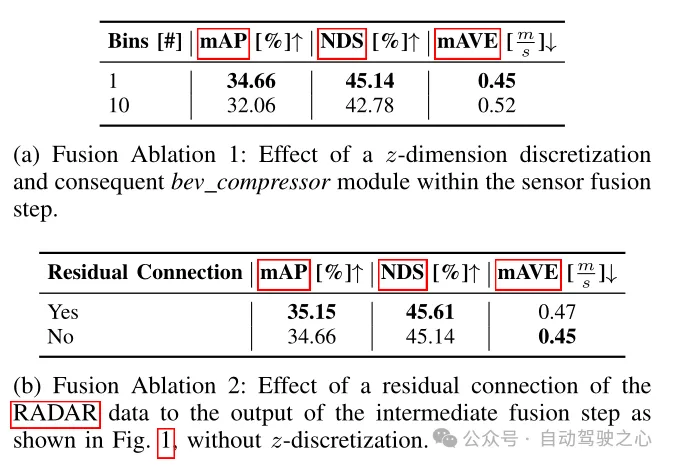
表 3 ベースライン BEVDet および CR3DT のさまざまな構成に基づく nuScenes 検証セットでの追跡結果 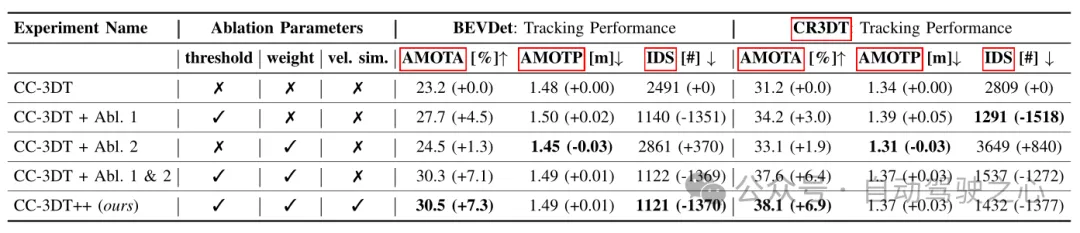
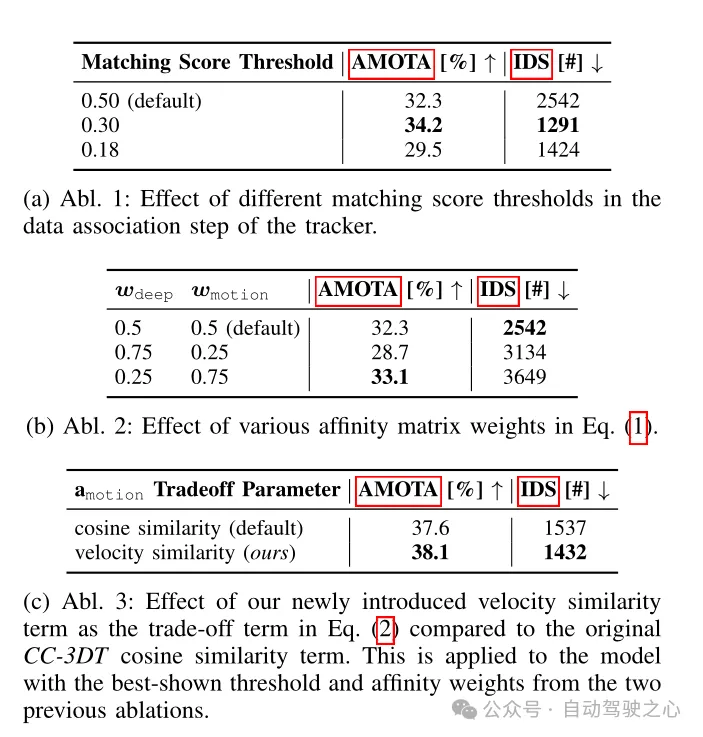 #表 4 CR3DT 検出バックボーンの追跡アーキテクチャ アブレーション実験
#表 4 CR3DT 検出バックボーンの追跡アーキテクチャ アブレーション実験
この研究では、特に 3D ターゲット検出とマルチターゲット追跡のための、効率的なカメラとレーダーの融合モデル CR3DT を提案します。レーダー データをカメラ専用の BEVDet アーキテクチャに統合し、CC-3DT 追跡アーキテクチャを導入することにより、CR3DT は 3D ターゲットの検出と追跡の精度を大幅に向上させ、mAP と AMOTA がそれぞれ 5.35% と 14.9% 増加しました。
カメラとミリ波レーダーの融合ソリューションは、純粋な LiDAR または LiDAR とカメラの融合ソリューションと比較して低コストという利点があり、現在の自動運転車の開発に近いものです。さらに、ミリ波レーダーには悪天候にも強いという利点があり、さまざまな応用シナリオに対応できます。現在の大きな問題は、ミリ波レーダーの点群がまばらであり、高さ情報を検出できないことです。しかし、4D ミリ波レーダーの継続的な開発により、将来的にはカメラとミリ波レーダー ソリューションの統合がより高いレベルに達し、さらに良い結果が得られると信じています。
以上がBEVFormerを超えて! CR3DT: RV フュージョンは新しい SOTA (ETH) の 3D 検出と追跡を支援しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7564
7564
 15
1386
52
87
11
28
100
15
1386
52
87
11
28
100

 4K HD映像がわかりやすい!この大規模なマルチモーダル モデルは、Web ポスターのコンテンツを自動的に分析するため、作業者にとって非常に便利です。
Apr 23, 2024 am 08:04 AM
4K HD映像がわかりやすい!この大規模なマルチモーダル モデルは、Web ポスターのコンテンツを自動的に分析するため、作業者にとって非常に便利です。
Apr 23, 2024 am 08:04 AM
PDF、Web ページ、ポスター、Excel グラフの内容を自動的に分析できる大型モデルは、アルバイトにとってはあまり便利ではありません。上海 AILab、香港中文大学、その他の研究機関が提案した InternLM-XComposer2-4KHD (略称 IXC2-4KHD) モデルは、これを実現します。解像度制限が 1500x1500 以下である他のマルチモーダル大型モデルと比較して、この作業ではマルチモーダル大型モデルの最大入力画像が 4K (3840x1600) 解像度を超え、任意のアスペクト比と 336 ピクセルをサポートし、 4K 動的解像度の変更。発売から3日後、このモデルはHuggingFaceのビジュアル質疑応答モデルの人気ランキングで1位となった。扱いやすい
 CVPR 2024 | フォトリアルなシーン生成のための LiDAR 拡散モデル
Apr 24, 2024 pm 04:28 PM
CVPR 2024 | フォトリアルなシーン生成のための LiDAR 拡散モデル
Apr 24, 2024 pm 04:28 PM
原題: TowardsRealisticSceneGenerationwithLiDARDiffusionModels 論文リンク: https://hancyran.github.io/assets/paper/lidar_diffusion.pdf コードリンク: https://lidar-diffusion.github.io 著者の所属: CMU Toyota Research Institute 南カリフォルニア大学論文アイデア : 拡散モデル (DM) はフォトリアリスティックな画像合成に優れていますが、これを LIDAR シーン生成に適応させるには大きな課題が生じます。これは主に、ポイント空間で運用する DM が困難であるためです。
 RVフュージョンのパフォーマンスがすごい! RCBEVDet: レーダーにも春、最新の SOTA があります!
Apr 02, 2024 am 11:49 AM
RVフュージョンのパフォーマンスがすごい! RCBEVDet: レーダーにも春、最新の SOTA があります!
Apr 02, 2024 am 11:49 AM
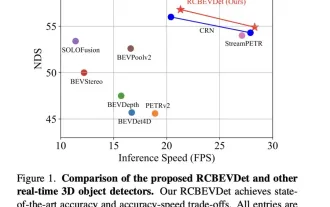
上記と著者の個人的な理解は、このディスカッションペーパーが焦点を当てている主な問題は、自動運転のプロセスにおける 3D ターゲット検出テクノロジーの応用であるということです。環境ビジョンカメラ技術の開発により、3D オブジェクト検出のための高解像度のセマンティック情報が提供されますが、この方法は、深度情報を正確にキャプチャできないことや、悪天候や低照度条件でのパフォーマンスの低下などの問題によって制限されます。この問題に対応して、議論ではサラウンドビューカメラと経済的なミリ波レーダーセンサーを組み合わせた新しいマルチモード3D目標検出方法RCBEVDetが提案されました。この方法は、複数のセンサーからの情報を総合的に使用することで、より豊富なセマンティック情報を提供し、悪天候や低照度条件でのパフォーマンスの低下などの問題の解決策を提供します。この問題を解決するために、議論ではサラウンドビューカメラを組み合わせる方法が提案されました。
 LiDAR シミュレーションの新しいアイデア | LidarDM: 4D ワールドの生成に役立ち、シミュレーションキラー~
Apr 12, 2024 am 11:46 AM
LiDAR シミュレーションの新しいアイデア | LidarDM: 4D ワールドの生成に役立ち、シミュレーションキラー~
Apr 12, 2024 am 11:46 AM
原題: LidarDM: GenerativeLiDARSimulationinaGeneratedWorld 論文リンク: https://arxiv.org/pdf/2404.02903.pdf コードリンク: https://github.com/vzyrianov/lidardm 著者の所属: イリノイ大学、マサチューセッツ工科大学 論文のアイデア:この記事の紹介 LidarDM は、現実的で、レイアウトを認識し、物理的に信憑性があり、時間的に一貫性のある LIDAR ビデオを生成できる新しい LIDAR 生成モデルです。 LidarDM には、LIDAR 生成モデリングにおいて前例のない 2 つの機能があります。(1)
 BEVFormerを超えて! CR3DT: RV フュージョンは新しい SOTA (ETH) の 3D 検出と追跡を支援します
Apr 24, 2024 pm 06:07 PM
BEVFormerを超えて! CR3DT: RV フュージョンは新しい SOTA (ETH) の 3D 検出と追跡を支援します
Apr 24, 2024 pm 06:07 PM
上記と筆者の個人的な理解 この記事では、3D ターゲット検出とマルチターゲット追跡のためのカメラとミリ波レーダーの融合手法 (CR3DT) を紹介します。 LIDAR ベースの手法はこの分野に高い基準を設定していますが、その高いコンピューティング能力と高コストにより、カメラベースの 3D ターゲット検出および追跡ソリューションの自動運転分野でのこのソリューションの開発は制限されています。コストが比較的低く、多くの学者の注目を集めていますが、結果が芳しくないためです。そこで、カメラとミリ波レーダーの融合が有力な解決策となりつつあります。既存のカメラ フレームワーク BEVDet の下で、ミリ波レーダーの空間情報と速度情報を融合し、それを CC-3DT++ 追跡ヘッドと組み合わせることで、3D ターゲットの検出と追跡の精度が大幅に向上しました。
 「詳細な分析」: 自動運転における LiDAR 点群セグメンテーション アルゴリズムの調査
Apr 23, 2023 pm 04:46 PM
「詳細な分析」: 自動運転における LiDAR 点群セグメンテーション アルゴリズムの調査
Apr 23, 2023 pm 04:46 PM
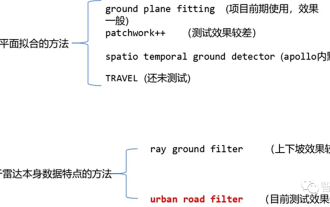
現在、一般的なレーザー点群セグメンテーション アルゴリズムには、平面フィッティングに基づく方法とレーザー点群データの特性に基づく方法の 2 つがあります。詳細は以下のとおりです。 点群地面分割アルゴリズム 01 平面フィッティングに基づく手法 - GroundPlaneFitting アルゴリズムの考え方: 簡単な処理方法は、空間を x 方向 (車の頭の方向) に沿っていくつかのサブ平面に分割し、次に、Ground Plane Fitting Algorithm (GPF) を使用すると、急な傾斜を処理できる地面セグメンテーション方法が得られます。この方法は、グローバル平面を単一フレームの点群に当てはめる方法であり、点群の数が多い場合に効果的ですが、点群がまばらな場合、16 ラインなどの検出漏れや誤検出が発生しやすくなります。ライダー。アルゴリズム擬似コード: 擬似コード アルゴリズム プロセスは、特定の点群 P のセグメンテーションの最終結果です。
 厳しい気象条件下でのLiDARセンシング技術ソリューション
May 10, 2023 pm 04:07 PM
厳しい気象条件下でのLiDARセンシング技術ソリューション
May 10, 2023 pm 04:07 PM
01概要 自動運転車は、さまざまなセンサーを利用して周囲の環境に関する情報を収集します。車両の動作は環境への配慮に基づいて計画されているため、安全上の理由からその信頼性が非常に重要です。アクティブ LIDAR センサーはシーンの正確な 3D 表現を作成できるため、自動運転車の環境認識に価値を加えることができます。 LiDAR の性能は、霧、雪、雨などの悪天候下では、光の散乱や遮蔽により変化します。この制限により、最近、知覚パフォーマンスの低下を軽減する方法に関する多大な研究が促進されています。このペーパーでは、悪天候に対処するための LiDAR ベースの環境センシングのさまざまな側面を収集、分析、および議論します。また、適切なデータの利用可能性、生の点群処理とノイズ除去、堅牢な知覚アルゴリズム、およびノイズを軽減するためのセンサー フュージョンなどのトピックについて説明します。
 Javaで実装されたレーダー信号処理技術の紹介
Jun 18, 2023 am 10:15 AM
Javaで実装されたレーダー信号処理技術の紹介
Jun 18, 2023 am 10:15 AM
はじめに: 現代の科学技術の継続的な発展に伴い、レーダー信号処理技術はますます広く使用されるようになりました。現在最も人気のあるプログラミング言語の 1 つである Java はレーダー信号処理アルゴリズムの実装に広く使用されており、この記事では Java で実装されたレーダー信号処理技術について紹介します。 1. レーダー信号処理技術の紹介 レーダー信号処理技術は、レーダーシステム開発の根幹とも言える技術であり、レーダーシステムの自動化・デジタル化を実現するためのキーテクノロジーです。レーダー信号処理技術には、波形処理、フィルタリング、パルス圧縮、適応ビーム整形が含まれます。
