

Gaussian-LIC: 初のマルチセンサー融合 3DGS-SLAM システム (浙江大学 & TUM)

マルチセンサーと 3DGS の組み合わせ
「3D 空間でのサンプリングに基づく計算集約型の SLAM タスクに必要なリアルタイム機能」を暗黙的に表現するには、次のことが必要です。 NeRFベースのSLAM方式に基づいています。 3DGS は、その高速なレンダリング速度と優れたビジュアル品質で際立っています。 3DGS は明確で解釈可能な表現として、シーンの編集をシンプルにし、多数の下流タスクの実行を容易にします。
既存の放射線場ベースの SLAM システムは、主に 明るい小規模屋内環境 でテストされ、シーケンシャル RGB-D または RGB 入力を使用して満足のいく結果が得られます。これらの方法を、困難な照明条件、乱雑な背景、非常に動的な自己の動きなど、制御されていない困難な大規模な屋外シーンに拡張すると、問題が発生します。
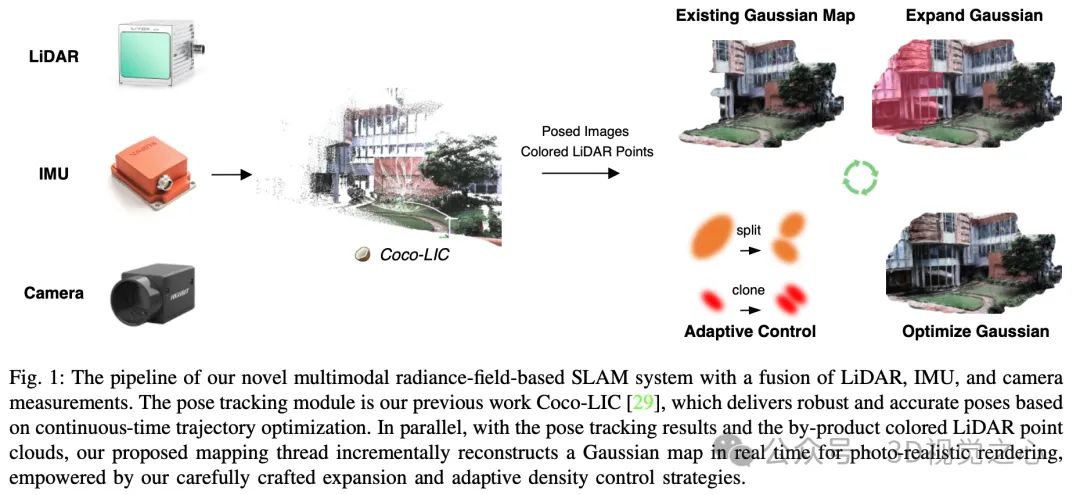
3D LIDAR、IMU、カメラ (ALIC と呼ばれる) を含む複数のセンサーからのデータを融合することで、制御されていない屋外シーンで Gaussian-LIC を使用する
- LIDAR に基づく初の 3DGS-SLAM システム慣性カメラフュージョンにより、高精度の姿勢追跡とリアルなオンラインマップ構築を実現します。
- オンライン方法でガウス マップを再構成するには、事前に色分けされた LIDAR 点群を事前分布として使用します。慎重に設計された一連の戦略を利用して、ガウス マップを徐々に拡張し、その密度を適応的に制御して、高い効率と精度を達成します。
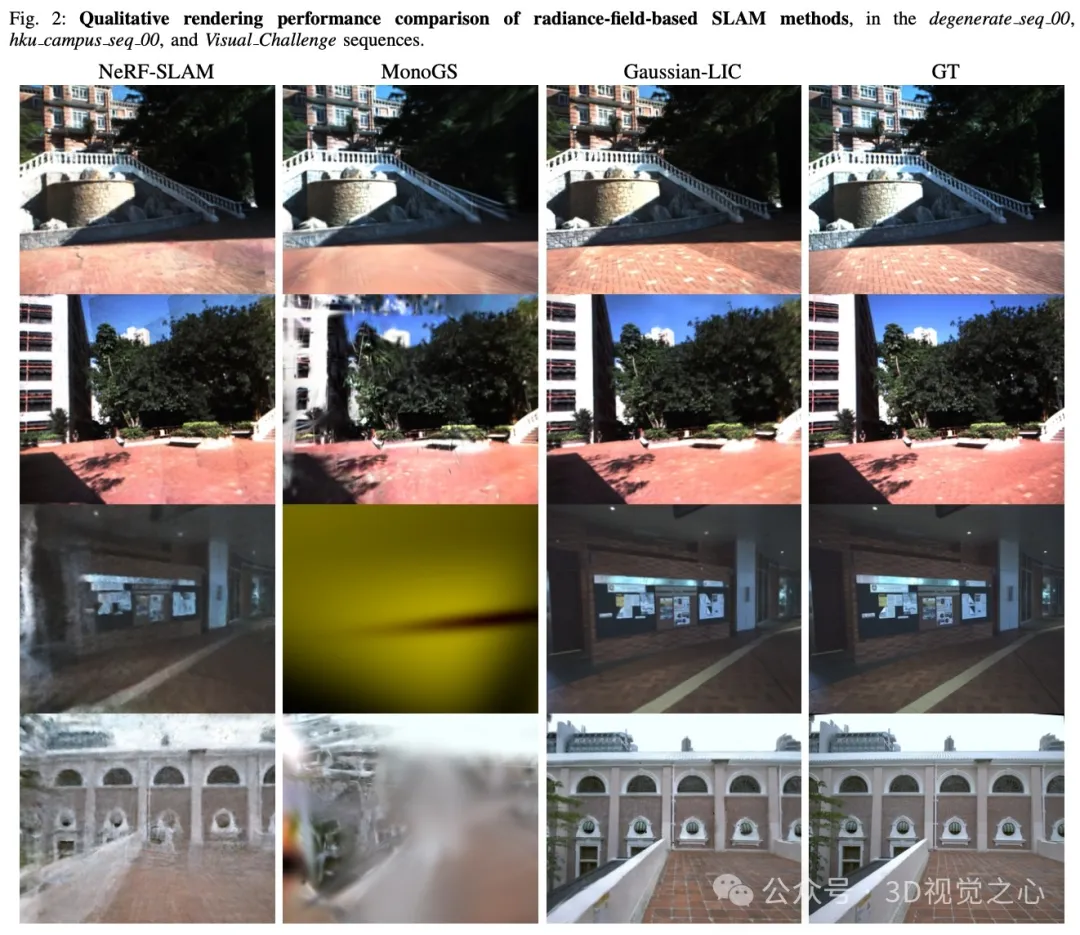
- 屋内および屋外のシーンで幅広く実証されており、フォトリアリスティックな地図作成における最新のパフォーマンスを実証しています。非常にダイナミックな動き、低照明、ジオメトリや視覚的テクスチャの欠如など、過酷な条件下でも堅牢性を実証しました。
具体的な方法
図 1 に示すのは、LIC-SLAM システム プロセスです。
3DGS の表現
シーンを異方性 3D ガウス コレクション、各ガウスの分散として表現します。

3D ガウスを画像平面に投影して 2D ガウス分布を取得します。
投影によって取得された 2D ガウスが渡されます。重み付け方程式は、不透明度を介してピクセルに影響します。

輪郭画像をレンダリングして、ピクセルにガウス マップからの十分な情報が含まれているかどうかを判断します。

LiDAR-IMU-カメラ走行距離計
走行距離計は、追跡フロントエンドとして以前の作品 Coco-LIC を採用しており、連続時間密結合 LiDAR 慣性カメラ測距システムです。 Gaussian-LIC は、3 つの相補的なセンサーを統合することにより、強力でリアルタイムかつ高精度の姿勢推定を実現し、SLAM システム全体の動作を容易にします。
最新の LIDAR 慣性カメラ データ (この記事では 0.1 秒) が蓄積されるたびに、その時間間隔内の軌道はファクター グラフに基づいて効率的に最適化されます。
- Lidar 点群マップする
- マップする画像の視覚係数
- IMU係数
- 偏差係数
時間間隔では、最新の画像のみを使用して最適化します。 。
Gaussian-LIC は、0.1 メートルの解像度でボクセルに保存されたグローバル LIDAR マップを維持します。現在の時間間隔内の軌道を最適化した後、効率を向上させるために、その期間内の LIDAR ポイントの 4 分の 1 のみがワールド座標に変換され、ボクセルに追加され、各ボクセル内の LIDAR ポイントの数が確実にそれらの間の距離になります。冗長性を減らすために、0.05 メートルより大きくする必要があります。正常にアタッチされた LIDAR ポイントについては、それらを最新の画像に投影し、ピクセル値をクエリして色付けします。その後、それらは、フレームとみなされる、推定されたカメラ ポーズの最新の画像とともにマッピング スレッドに送信されます。
3DGS に基づく現実的なマッピング
推定されたカメラの姿勢、歪みのない画像、色付きの LIDAR ポイントなどの継続的な入力により、マッピング モジュールが徐々に構築され、主にガウス マップの最適化が行われます。 4 つのステップに分かれています:
- 初期化: 最初の時間間隔で受信したすべての LIDAR ポイントを使用して、新しいガウス分布を作成します。エイリアシング アーティファクトを軽減するために、イメージ プレーンに近いガウスには小さなスケールを割り当て、イメージ プレーンから遠いガウスには大きなスケールを割り当てます。
 #
#
- 拡張機能: 通常、受信した各フレームは、新しい表示領域のジオメトリと外観をキャプチャします。重複や非常に類似した情報の冗長性を避けるために、まず式 (6) に従って現在の画像ビューから等高線画像 をレンダリングし、現在のガウス信頼性の低いガウスを選択するためのマスク を生成します。マップ内にピクセルが存在し、新しいエリアを観察する傾向があるため、選択したピクセルに投影できる LIDAR ポイントのみが利用されます:

- 最適化: 最適化受信したすべての画像を使用することは、オンライン インクリメンタル マッピング システムでは計算上実行不可能であるため、5 つおきの画像フレームがキーフレームとみなされます。計算の複雑さを制限して効率を高めるために、最初と最後のキーフレームを含む アクティブなキーフレームを選択してガウス マップを最適化し、その他のランダムに選択された キーフレームを使用して、致命的な忘却の問題を回避します。地球地図の幾何学的一貫性を維持します。選択した キーフレームをランダムにシャッフルし、各キーフレームを 1 つずつ繰り返し、再レンダリングの損失を最小限に抑えてマップを最適化します。

- 適応制御: 特に境界のない屋外環境では、LiDAR スキャンがシーン全体をカバーできない場合があります。したがって、単位体積内のガウスマップを高密度化するための適応制御を実行する必要があります。元の戦略は大きな勾配を持つガウスを固定間隔で処理しますが、インクリメンタル モードでは、まだ収束していないことが多いため、最近追加されたガウスは勾配が大きいために誤って複製または分割される可能性があります。解決策は、既存のガウス分布を安定なカテゴリと不安定なカテゴリに分類し、安定したガウス分布のみを高密度化することです。 ############実験#####################################
##要約とディスカッション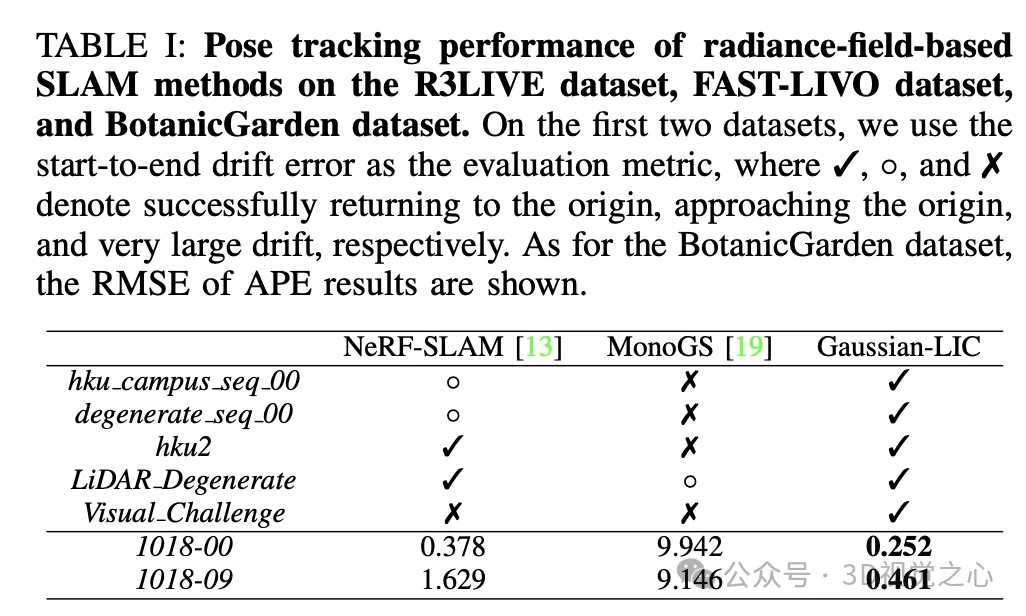
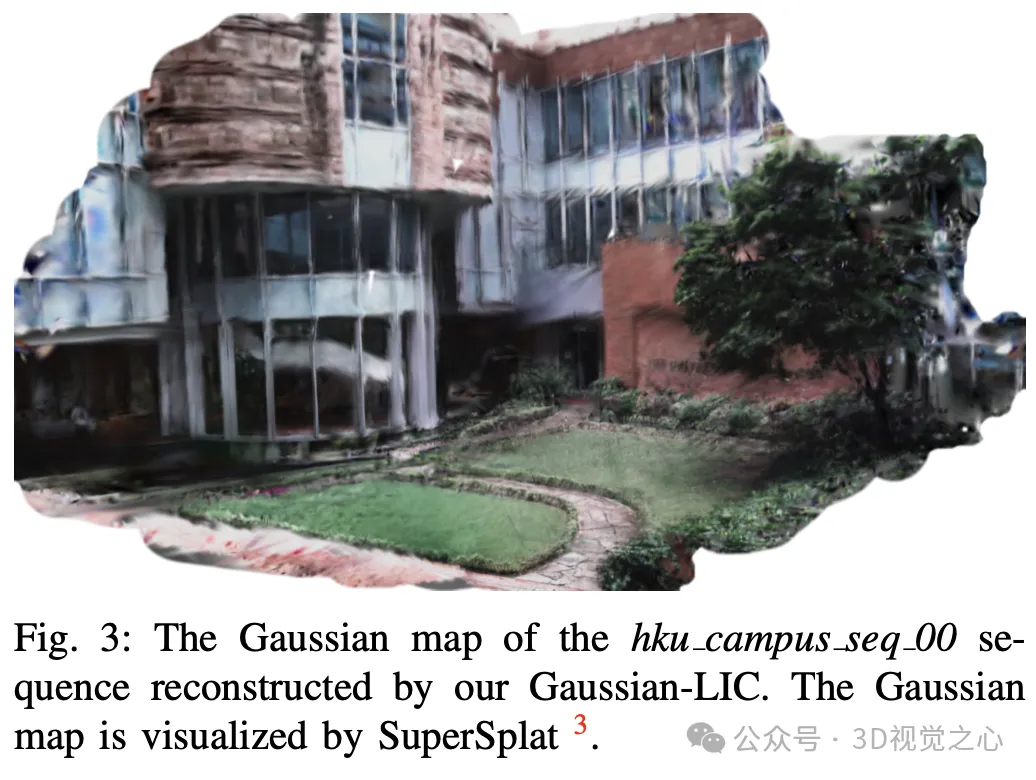
Gaussian-LIC は、新しい LiDAR 慣性カメラ放射場 SLAM システムです。高精度のトラッキングと 3D ガウス スプラッターによるリアルなオンライン再構成の 2 つの機能を備えています。効率的な LiDAR 慣性カメラ オドメトリによって生成された世界座標内のシェーディングされた LiDAR ポイントは、屋内および屋外シーンでの一般化が大幅に改善されたガウス マップの増分構築を支援するための良好な事前分布として使用されます。 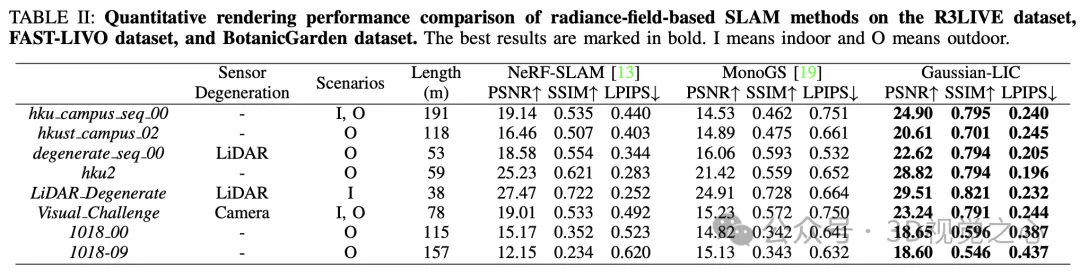
 さまざまな LIDAR をサポートしていますが、現在はソリッドステート LIDAR のみを使用しようとしています。
さまざまな LIDAR をサポートしていますが、現在はソリッドステート LIDAR のみを使用しようとしています。
カメラの自動露出とモーション ブラーは、リアルなマップの視覚的な品質に影響します。 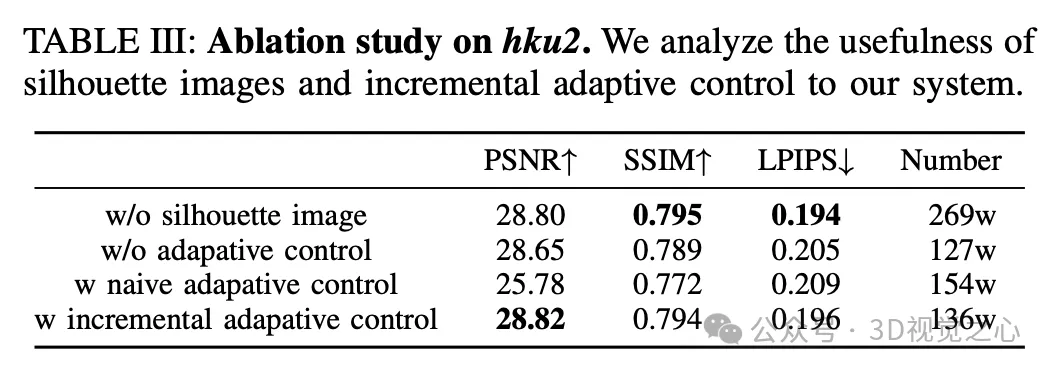
以上がGaussian-LIC: 初のマルチセンサー融合 3DGS-SLAM システム (浙江大学 & TUM)の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7513
7513
 15
1378
52
79
11
19
64
15
1378
52
79
11
19
64

 うわ〜すごい! Samsung Galaxy Ring体験:2999元の本物のスマートリング
Jul 19, 2024 pm 02:31 PM
うわ〜すごい! Samsung Galaxy Ring体験:2999元の本物のスマートリング
Jul 19, 2024 pm 02:31 PM
サムスンは7月17日にSamsung Galaxy Ringの国内版を正式にリリースし、価格は2,999元となった。 Galaxy Ring の実際の電話は、まさに「WowAwesome、これは私だけの特別な瞬間です」の 2024 年バージョンです。 AppleのVision Proを除けば、近年で最も新鮮さを感じさせる(フラグっぽいですが)電子製品です。 (写真では左右のリングがGalaxy Ring↑) Samsung Galaxy Ringの仕様(データは中国銀行公式サイトより):ZephyrRTOSシステム、8MBストレージ、10ATM防水+IP68、バッテリー容量18mAh~23.5 mAh (さまざまなサイズ
 フルスクリーンにアップグレードしてください! iPhone SE4は9月に進みました
Jul 24, 2024 pm 12:56 PM
フルスクリーンにアップグレードしてください! iPhone SE4は9月に進みました
Jul 24, 2024 pm 12:56 PM
最近、iPhone SE4に関する新しいニュースがWeiboで明らかになりました。iPhone SE4の背面カバーのプロセスはiPhone 16の標準バージョンとまったく同じであると言われています。つまり、iPhone SE4はガラスの背面パネルとストレートスクリーン&ストレートエッジデザイン。 iPhone SE4は今年9月に前倒しして発売されると報じられており、iPhone 16と同時に発表される可能性が高い。 1. 公開されたレンダリングによると、iPhone SE4の前面デザインはiPhone 13と似ており、ノッチスクリーンに前面カメラとFaceIDセンサーが搭載されています。背面はiPhoneXrと同様のレイアウトを採用していますが、カメラは1つだけで、全体的なカメラモジュールはありません。
 携帯電話の 1 インチセンサーはどれくらいの大きさですか? 実はカメラの 1 インチセンサーよりも大きいのです。
May 08, 2024 pm 06:40 PM
携帯電話の 1 インチセンサーはどれくらいの大きさですか? 実はカメラの 1 インチセンサーよりも大きいのです。
May 08, 2024 pm 06:40 PM
昨日の記事では「センサーサイズ」について言及していませんでしたが、ここまで誤解が多いとは思いませんでした…1インチってどれくらいですか?歴史的な問題*により、カメラでも携帯電話でも、センサーの対角長の「1インチ」は25.4mmではありません。 ※真空管に関して言えば、ここでは膨張はありません。線路の幅を決めるのは馬のお尻のようなものです。誤解を避けるために、より厳密に書くと、「タイプ 1.0」または「タイプ 1.0」となります。また、センサーサイズが1/2型未満の場合はタイプ1=18mm、センサーサイズが1/2型以上の場合はタイプ1=18mmとなります。
 カメラとライダーはどのように調整されますか?業界のすべての主流の校正ツールの概要
Mar 22, 2024 pm 02:01 PM
カメラとライダーはどのように調整されますか?業界のすべての主流の校正ツールの概要
Mar 22, 2024 pm 02:01 PM
カメラやライダーのキャリブレーションは多くの作業において重要な基礎作業であり、キャリブレーションの精度はその後のソリューションフュージョンの効果の上限に直接影響します。多くの自動運転およびロボット企業は、キャリブレーションの精度を継続的に向上させるために多くの人的資源と物的リソースを投資しています。今日は、一般的なカメラとライダーのキャリブレーション ツールボックスをいくつか紹介します。これらを収集することをお勧めします。 1.Libcbdetect は複数のチェッカーボードをワンショットで検出します: https://www.cvlibs.net/software/libcbdetect/MATLAB を使用して記述されたアルゴリズムは、コーナー ポイントを自動的に抽出してサブピクセル レベルまで正確にし、これらのコーナー ポイントを組み合わせることができます。長方形の市松模様に。数えるべきだ
 AirPods Pro および AirPods 3: 力センサーのコントロールを変更する方法
Apr 13, 2023 am 11:43 AM
AirPods Pro および AirPods 3: 力センサーのコントロールを変更する方法
Apr 13, 2023 am 11:43 AM
AirPods Pro には、インイヤーデザインのノイズキャンセリングや透明モードなどの優れた機能が備わっています。これらの機能と他の機能を切り替えるには、AirPods Pro (および AirPods 3) ステムにある力センサーを使用して簡単に制御できます。押す速度、押す時間、左右の力センサーの動作など、AirPods のコントロールを変更する方法については、この記事を読んでください。 AirPods 第 1 世代および第 2 世代では、イヤフォンをダブルタップして制御します。ただし、AirPods Pro と AirPods 3 は、各イヤホンのステムに組み込まれた圧力センサーを使用します。ノイズリダクション、透明性、オフを切り替える 3 つの方法と、力センサーをカスタマイズする方法について説明します。
 国産センサー天井! OV50K40センサーの詳しい説明
Mar 20, 2024 am 09:56 AM
国産センサー天井! OV50K40センサーの詳しい説明
Mar 20, 2024 am 09:56 AM
国内メーカーのHoweは、新しいCMOS-OV50K40センサーをリリースしました。このセンサーは、TheiaCelテクノロジーを採用した世界初のスマートフォン用イメージセンサーで、独自の設計により1回の露光で人間の目の高さに近いダイナミックレンジを実現します。 OV50K40 センサーは 5,000 万ピクセルのネイティブ解像度を持ち、1/1.3 インチの大きなベース領域を使用し、各ピクセルの面積は 1.2 ミクロンに達します。さらに、4 in 1 ピクセル出力もサポートしています。これは、4 つのピクセルを 1 つに結合して 1,250 万ピクセルの画像を出力することを意味し、より強力な光感度をもたらします。センサーのフレーム レートは、フル 50 メガピクセル B で 120 フレーム/秒および 60 フレーム/秒 (HDR) をサポートします。
 Android の写真が Apple に勝てると考える人がいるのはなぜですか?答えはとても直接的です
Mar 25, 2024 am 09:50 AM
Android の写真が Apple に勝てると考える人がいるのはなぜですか?答えはとても直接的です
Mar 25, 2024 am 09:50 AM
Android スマートフォンのカメラ機能について議論すると、ほとんどのユーザーは肯定的なフィードバックを返し、Apple スマートフォンと比較して Android スマートフォンのカメラ性能が優れていると一般的に信じています。この見解には根拠がないわけではなく、実際的な理由は明らかです。ハイエンドの Android スマートフォンは、ハードウェア構成、特にカメラ センサーの点で大きな競争上の優位性を持っています。多くのハイエンド Android スマートフォンは、最新の最高級カメラ センサーを使用しており、ピクセル数、絞りサイズ、光学ズーム機能の点で、同時期にリリースされた iPhone よりも優れていることがよくあります。この利点により、Android スマートフォンは写真撮影やビデオ録画時に高品質の画像効果を提供することができ、写真やビデオ撮影に対するユーザーのニーズに応えます。したがって、ハードウェア構成の競争力が Android スマートフォンの魅力となっています。
 Xiaomi 15シリーズの完全なコードネームが明らかに:Dada、Haotian、Xuanyuan
Aug 22, 2024 pm 06:47 PM
Xiaomi 15シリーズの完全なコードネームが明らかに:Dada、Haotian、Xuanyuan
Aug 22, 2024 pm 06:47 PM
Xiaomi Mi 15シリーズは10月に正式リリースされる予定で、その全シリーズのコードネームが海外メディアのMiCodeコードベースで公開されている。その中でもフラッグシップモデルであるXiaomi Mi 15 Ultraのコードネームは「Xuanyuan」(「玄源」の意味)です。この名前は中国神話に登場する高貴さを象徴する黄帝に由来しています。 Xiaomi 15のコードネームは「Dada」、Xiaomi 15Proのコード名は「Haotian」(「好天」の意味)です。 Xiaomi Mi 15S Proの内部コード名は「dijun」で、「山と海の古典」の創造神である淳皇帝を暗示しています。 Xiaomi 15Ultra シリーズのカバー
