

Photoshop鼠绘出非常可爱的3D圣诞雪人效果

制作实物之前,需要找相关的素材参考一下,了解清楚构造及局部的光感构成。这一步非常重要,将影响作品的好坏及真实感。有了充足的准备,后期的刻画就会容易很多。
最终效果
1、制作之前,我们先把雪人拆分一下,分为头、围巾、躯干三大部分,如下图。
<图1> 
<图2> 
<图3>
2、新建一个600 * 800像素的画布,背景选择白色。新建一个组,命名为帽子,如下图。
<图4>
3、新建一个图层,用钢笔勾出帽沿部分的轮廓,转为选区后由左边向右拉出图6所示径向渐变。
<图5> 
<图6>
4、新建一个图层,按Ctrl + Alt + G 创建剪贴蒙版,然后在当前图层下面新建一个图层,用钢笔勾出右边的高光部分,转为选区后羽化6个像素,填充红色:#D95734。
<图7>
5、新建一个图层,用钢笔勾出左边的暗部选区,羽化5个像素后填充暗红色。
<图8>
6、新建一个图层,用钢笔勾出顶部的高光选区,羽化5个像素后填充橙红色。
<图9>
7、新建一个图层,用钢笔勾出左上角高光部分,羽化3个像素后填充橙黄色。
<图10>
8、把当前图层复制一层,混合模式改为“强光”,按Ctrl + T 适当缩小一点,加强高光中心的亮度。
<图11>
9、新建一个图层,用钢笔勾出底部高光选区,羽化5个像素后填充橙红色,左侧再用减淡工具涂亮一点。
<图12>
10、新建一个图层,用钢笔勾出左侧底部高光选区,羽化3个像素后填充橙黄色。
<图13>
11、新建一个图层,用钢笔勾出底部暗部选区,羽化3个像素后填充暗红色。
<图14>
12、新建一个图层,用钢笔勾出顶部暗部选区,羽化3个像素后填充暗红色。
<图15>
13、在当前组的最下面新建一个图层,用钢笔勾出帽子顶部的选区,填充暗红色。
<图16>
14、新建一个图层,按Ctrl + Alt + G 创建剪贴蒙版,然后在当前图层下面新建一个图层,用钢笔勾出左侧的高光选区,羽化20个像素后填充红色。
<图17>
15、新建一个图层,同上的方法制作右侧及顶部的高光,过程如图18 - 20。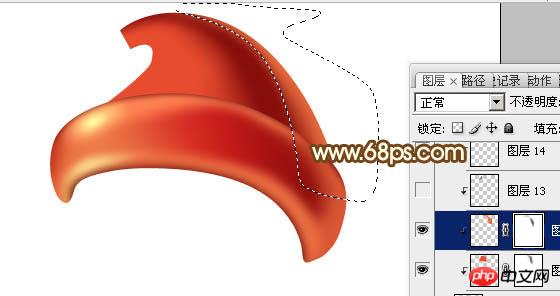
<图18> 
<图19> 
<图20>
16、在当前组的最上面新建一个图层,用椭圆选框工具拉一个小的正圆选区,拉上图22所示的径向渐变。然后再加上高光,效果如图23。
<图21> 
<图22> 
<图23>
17、在当前组下面新建一个组,命名为“头部”,然后在组里新建一个图层,用钢笔勾出脸部轮廓,转为选区后填充黄褐色,如下图。
<图24>
18、新建图层后按Ctrl + Alt + G 创建剪贴蒙版,然后同上的方法刻画高光和暗部,过程如图25 - 27。
<图25> 
<图26> 
<图27>
19、新建图层,同上的方法刻画嘴部,过程如图28 - 31。
<图28> 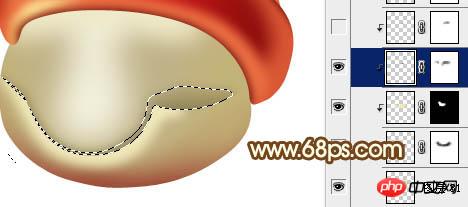
<图29> 
<图30> 
<图31>
20、新建图层,刻画五官部分,过程如图32,33。
<图32> 
<图33>
21、新建组,同上的方法制作围巾及躯干部分,如图34,35。
<图34> 
<图35>
最后调整一下细节和整体颜色,完成最终效果。
<图36>

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7510
7510
 15
1378
52
78
11
19
64
15
1378
52
78
11
19
64

 なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
上記と著者の個人的な理解 3 次元ガウシアンプラッティング (3DGS) は、近年、明示的な放射線フィールドとコンピューター グラフィックスの分野で出現した革新的なテクノロジーです。この革新的な方法は、数百万の 3D ガウスを使用することを特徴とし、主に暗黙的な座標ベースのモデルを使用して空間座標をピクセル値にマッピングする神経放射線場 (NeRF) 方法とは大きく異なります。明示的なシーン表現と微分可能なレンダリング アルゴリズムにより、3DGS はリアルタイム レンダリング機能を保証するだけでなく、前例のないレベルの制御とシーン編集も導入します。これにより、3DGS は、次世代の 3D 再構築と表現にとって大きな変革をもたらす可能性のあるものとして位置付けられます。この目的を達成するために、私たちは 3DGS 分野における最新の開発と懸念について初めて体系的な概要を提供します。
 Microsoft Teams の 3D Fluent 絵文字について学ぶ
Apr 24, 2023 pm 10:28 PM
Microsoft Teams の 3D Fluent 絵文字について学ぶ
Apr 24, 2023 pm 10:28 PM
特に Teams ユーザーの場合は、Microsoft が仕事中心のビデオ会議アプリに 3DFluent 絵文字の新しいバッチを追加したことを覚えておく必要があります。 Microsoft が昨年 Teams と Windows 向けの 3D 絵文字を発表した後、その過程で実際に 1,800 を超える既存の絵文字がプラットフォーム用に更新されました。この大きなアイデアと Teams 用の 3DFluent 絵文字アップデートの開始は、公式ブログ投稿を通じて最初に宣伝されました。 Teams の最新アップデートでアプリに FluentEmojis が追加 Microsoft は、更新された 1,800 個の絵文字を毎日利用できるようになると発表
 カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
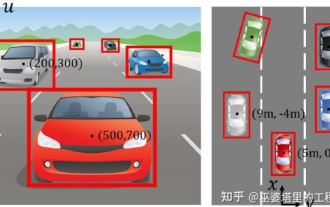
0.前面に書かれています&& 自動運転システムは、さまざまなセンサー (カメラ、ライダー、レーダーなど) を使用して周囲の環境を認識し、アルゴリズムとモデルを使用することにより、高度な知覚、意思決定、および制御テクノロジーに依存しているという個人的な理解リアルタイムの分析と意思決定に。これにより、車両は道路標識の認識、他の車両の検出と追跡、歩行者の行動の予測などを行うことで、安全な運行と複雑な交通環境への適応が可能となり、現在広く注目を集めており、将来の交通分野における重要な開発分野と考えられています。 。 1つ。しかし、自動運転を難しくしているのは、周囲で何が起こっているかを車に理解させる方法を見つけることです。これには、自動運転システムの 3 次元物体検出アルゴリズムが、周囲環境にある物体 (位置を含む) を正確に認識し、記述することができる必要があります。
 CLIP-BEVFormer: BEVFormer 構造を明示的に監視して、ロングテール検出パフォーマンスを向上させます。
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer: BEVFormer 構造を明示的に監視して、ロングテール検出パフォーマンスを向上させます。
Mar 26, 2024 pm 12:41 PM
上記および筆者の個人的な理解: 現在、自動運転システム全体において、認識モジュールが重要な役割を果たしている。道路を走行する自動運転車は、認識モジュールを通じてのみ正確な認識結果を得ることができる。下流の規制および制御モジュール自動運転システムでは、タイムリーかつ正確な判断と行動決定が行われます。現在、自動運転機能を備えた自動車には通常、サラウンドビューカメラセンサー、ライダーセンサー、ミリ波レーダーセンサーなどのさまざまなデータ情報センサーが搭載されており、さまざまなモダリティで情報を収集して正確な認識タスクを実現しています。純粋な視覚に基づく BEV 認識アルゴリズムは、ハードウェア コストが低く導入が容易であるため、業界で好まれており、その出力結果はさまざまな下流タスクに簡単に適用できます。
 Windows 11 のペイント 3D: ダウンロード、インストール、および使用ガイド
Apr 26, 2023 am 11:28 AM
Windows 11 のペイント 3D: ダウンロード、インストール、および使用ガイド
Apr 26, 2023 am 11:28 AM
新しい Windows 11 が開発中であるというゴシップが広まり始めたとき、すべての Microsoft ユーザーは、新しいオペレーティング システムがどのようなもので、何をもたらすのかに興味を持ちました。憶測を経て、Windows 11が登場しました。オペレーティング システムには新しい設計と機能の変更が加えられています。いくつかの追加に加えて、機能の非推奨と削除が行われます。 Windows 11 に存在しない機能の 1 つは Paint3D です。描画、落書き、落書きに適したクラシックなペイントは引き続き提供していますが、3D クリエイターに最適な追加機能を提供する Paint3D は廃止されています。追加機能をお探しの場合は、最高の 3D デザイン ソフトウェアとして Autodesk Maya をお勧めします。のように
 カード1枚で30秒でバーチャル3D嫁をゲット! Text to 3D は、毛穴の詳細が明確な高精度のデジタル ヒューマンを生成し、Maya、Unity、その他の制作ツールとシームレスに接続します
May 23, 2023 pm 02:34 PM
カード1枚で30秒でバーチャル3D嫁をゲット! Text to 3D は、毛穴の詳細が明確な高精度のデジタル ヒューマンを生成し、Maya、Unity、その他の制作ツールとシームレスに接続します
May 23, 2023 pm 02:34 PM
ChatGPT は AI 業界に鶏の血を注入し、かつては考えられなかったすべてのことが今日では基本的な慣行になりました。進化を続ける Text-to-3D は、AIGC 分野において Diffusion(画像)、GPT(テキスト)に次ぐホットスポットとされ、前例のない注目を集めています。いいえ、ChatAvatar と呼ばれる製品が控えめなパブリック ベータ版として公開され、すぐに 700,000 回を超えるビューと注目を集め、Spacesoftheweek で特集されました。 △ChatAvatarは、AIが生成した単一視点/多視点の原画から3Dの様式化されたキャラクターを生成するImageto3D技術にも対応しており、現在のベータ版で生成された3Dモデルは広く注目を集めています。
 オックスフォード大学の最新情報!ミッキー:2D画像を3D SOTAでマッチング! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
オックスフォード大学の最新情報!ミッキー:2D画像を3D SOTAでマッチング! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
前に書かれたプロジェクトのリンク: https://nianticlabs.github.io/mickey/ 2 枚の写真が与えられた場合、それらの写真間の対応関係を確立することで、それらの間のカメラのポーズを推定できます。通常、これらの対応は 2D 対 2D であり、推定されたポーズはスケール不定です。いつでもどこでもインスタント拡張現実などの一部のアプリケーションでは、スケール メトリクスの姿勢推定が必要なため、スケールを回復するために外部深度推定器に依存します。この論文では、3D カメラ空間でのメトリックの対応を予測できるキーポイント マッチング プロセスである MicKey を提案します。画像全体の 3D 座標マッチングを学習することで、相対的なメトリックを推測できるようになります。
 自動運転のための 3D 視覚認識アルゴリズムの詳細な解釈
Jun 02, 2023 pm 03:42 PM
自動運転のための 3D 視覚認識アルゴリズムの詳細な解釈
Jun 02, 2023 pm 03:42 PM
自動運転アプリケーションの場合、最終的には 3D シーンを認識することが必要になります。理由は簡単で、車両は画像から得られる知覚結果に基づいて運転することはできませんし、人間のドライバーであっても画像に基づいて運転することはできません。物体までの距離やシーンの奥行き情報は2D認識結果に反映できないため、自動運転システムが周囲の環境を正しく判断するための鍵となります。一般に、自動運転車の視覚センサー(カメラなど)は、車体上部または車内のバックミラーに設置されます。どこにいても、カメラが取得するのは、現実世界を透視図 (PerspectiveView) (世界座標系から画像座標系) に投影したものです。この視点は人間の視覚システムに非常に似ており、
