合計 10000 件の関連コンテンツが見つかりました

サーボモーターとは
記事の紹介:サーボモーターは、サーボシステム内の機械部品の動作を制御するエンジンを指します。モーターを補助する間接伝達装置です。サーボモーターは、速度を制御でき、位置精度が非常に正確です。電圧信号を変換できます。受け取った電気信号は、制御対象を駆動するためのトルクと速度に変換され、モータ軸の角変位または角速度出力に変換されます。
2022-07-15
コメント 0
20971
Xiaomi 499 サーボモーターとは何ですか?
記事の紹介:Xiaomi 499 サーボ モーターは、高性能マイクロ サーボ モーター製品です。サーボモーターは、入力信号に基づいて制御および調整できるモーターであり、産業オートメーション、ロボット工学、航空宇宙などの分野で一般的に使用されています。 Xiaomi 499 サーボ モーターは、高度な制御アルゴリズムとセンサー技術を使用して、高精度の位置と速度制御を実現します。高いトルク出力能力を持ち、大きな負荷でも安定した動作を維持できます。素早い応答特性を持ち、さまざまな作業ニーズなどに合わせて出力トルクと速度を素早く調整できます。
2023-09-22
コメント 0
1697
ステッピングモーターとサーボモーターの違い
記事の紹介:ステッピング モーターとサーボ モーターの主な違いは次のとおりです。 動作原理: ステッピング モーターはパルスによって回転しますが、サーボ モーターはフィードバック制御によって正確に回転します。制御モード: ステッピング モーターはパルス信号に依存し、サーボ モーターは閉ループ制御に依存します。特徴: サーボ モーターは高精度、大きなトルク、スムーズな速度を備えています。ステッピング モーターはステップ精度に限界があり、トルクが低く、速度が遅く、明らかな振動音が発生します。
2024-04-25
コメント 0
1180
サーボモーターの動作原理
記事の紹介:動作原理: 1. 信号を受信; 2. 信号処理; 3. エネルギーを変換; 4. モーターを駆動; 5. フィードバックシステム。
2024-01-17
コメント 0
2562
サーボモーターとは何ですか?
記事の紹介:サーボ モーターは、位置、速度、加速度を正確に制御する機能を備えた特殊なタイプのモーターです。サーボモータは、通常のモータと異なり、入力された制御信号に応じて動作状態を調整し、正確な位置制御を実現することができ、産業オートメーションや航空宇宙などの分野で広く使用されています。
2023-08-22
コメント 0
4035
Xiaomi の高性能サーボ モーターは何をするのですか?
記事の紹介:Xiaomi の高性能サーボ モーターは、産業オートメーション、ロボット工学、医療機器、航空宇宙などの分野で重要な役割を果たしています。詳細な紹介: 1. 産業オートメーションは正確な位置制御と速度調整を実現し、機器がさまざまなタスクを効率的に完了できるようにします; 2. ロボット技術、サーボモーターは、正確な位置と速度制御を通じてロボットの動きをより正確かつ正確にすることができます。サーボモーターが手術用ロボットの関節を駆動し、低侵襲手術や精密な手術を可能にする装置、4. 航空宇宙分野など
2023-09-26
コメント 0
1119

サーボドライブの問題のトラブルシューティングガイド
記事の紹介:サーボドライブの問題について教えてください。 Siemens 200PLC 出力トランジスタの電流は約 0.2A です。サーボの電流はいくらですか? 200PLC は 24V 電圧出力パルスです。サーボはどのような電圧を受け入れますか? PLC のパルス出力ポートを直接使用してモーターを接続すると、モーター回転時の電流は通常 0.2A 未満と非常に小さく、瞬時の始動しか実現できません。また、この接続方法では、パルス信号を受信して位置決めを行うことができるサーボモーターやステッピングモーターのように、位置決め機能を実現することはできません。サーボモーター、ステッピングモーターともにドライバー制御が必要で、ドライバーはシーメンス200からのパルス信号を受けてモーターを制御することで位置決め機能を実現します。したがって、モーターを制御するドライバーを使用する必要があります。
2024-01-20
コメント 0
601
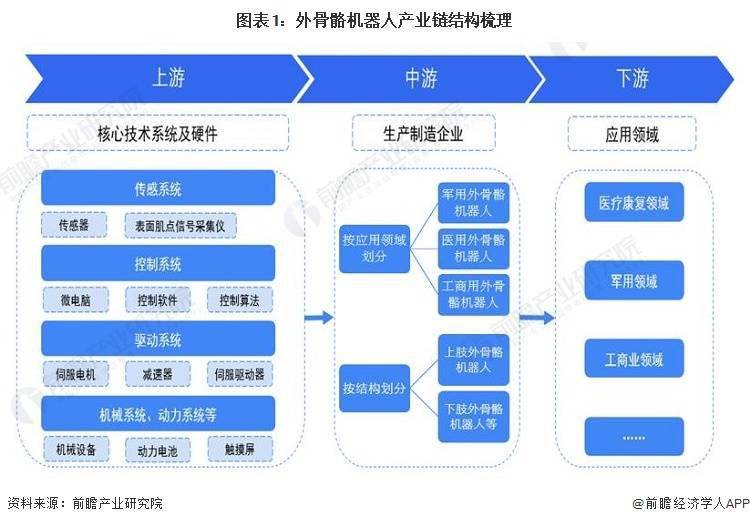
新しいタイトル: 中国の外骨格ロボット産業: 2023 年の産業チェーンと市場競争パターンの現状分析 (中国東部の沿岸地域における企業の分布)
記事の紹介:業界の主要上場企業: (300024)、(688580)、(836163) など この記事のコアデータ: 産業チェーンのパノラマ、地域ヒートマップ、合併と再編の傾向 外骨格ロボット産業の産業チェーンのパノラマレビュー: 広範囲外骨格ロボット産業の上流と下流のレイアウト 中流の外骨格ロボットメーカーを中心として、上流は主にコア技術システムとハードウェアを含み、下流はその応用分野です。上流の観点から見ると、センシングシステム、制御システム、駆動システムの 3 つのシステムがキーシステムとなり、機械システムと電力システムはサポート装置として機能します。上流のコア製品には、制御センサー、表筋点信号コレクター、制御ソフトウェア、サーボモーター、サーボドライブ、減速機などが含まれます。中流では、外骨格ロボットは応用分野に応じて軍事用外骨格ロボットに分類できます。
2023-10-26
コメント 0
917

win7オペレーティングシステムをコンピュータにインストールする方法
記事の紹介:コンピュータオペレーティングシステムの中で、WIN7システムは非常に古典的なコンピュータオペレーティングシステムです。では、Win7システムをインストールするにはどうすればよいですか?以下のエディタでは、コンピュータに win7 システムをインストールする方法を詳しく紹介します。 1. まず、Xiaoyu システムをダウンロードし、デスクトップ コンピュータにシステム ソフトウェアを再インストールします。 2. win7 システムを選択し、「このシステムをインストールする」をクリックします。 3. 次に、win7 システムのイメージのダウンロードを開始します。 4. ダウンロード後、環境をデプロイし、完了後に「今すぐ再起動」をクリックします。 5. コンピュータを再起動すると、[Windows Manager] ページが表示されるので、2 番目のページを選択します。 6. コンピュータのインターフェイスに戻って、インストールを続行します。 7. 完了後、コンピューターを再起動します。 8. 最後にデスクトップが表示され、システムのインストールが完了します。 win7システムのワンクリックインストール
2023-07-16
コメント 0
1220
php挿入ソート
記事の紹介::この記事では主に php-insertion sort について紹介します。PHP チュートリアルに興味がある学生は参考にしてください。
2016-08-08
コメント 0
1077
PHP 構成ファイル php.ini のパスを見つけるグラフィカルな方法、_PHP チュートリアル
記事の紹介:PHP 設定ファイル php.ini のパスを確認する方法を図解で示します。 PHP 設定ファイル php.ini のパスを見つけるためのグラフィカルな方法。最近、一部のブロガーから、php.ini がどのディレクトリに存在するかという質問がありました。または、php.ini を変更しても有効にならないのはなぜですか?上記2つの質問を踏まえると、
2016-07-13
コメント 0
827
ファーウェイ、1,200万IOPSパフォーマンスをサポートする2つの新しい商用AI大型モデルストレージ製品を発売
記事の紹介:IT Houseは7月14日、ファーウェイが最近新しい商用AIストレージ製品「OceanStorA310ディープラーニングデータレイクストレージ」と「FusionCubeA3000トレーニング/プッシュハイパーコンバージドオールインワンマシン」をリリースしたと報じた。 AI モデル」、業界モデルのトレーニング、セグメント化されたシナリオ モデルのトレーニングと推論が新たな勢いをもたらします。」 ▲ 画像ソース Huawei IT Home が編集および要約: OceanStorA310 深層学習データ レイク ストレージは、主に基本/業界の大規模モデル データ レイク シナリオを対象としています。収集と前処理からモデルのトレーニングと推論の適用まで、AI プロセス全体で大規模なデータ管理からのデータ回帰を実現します。 OceanStorA310 シングルフレーム 5U は業界最高の 400GB/s をサポートすると公式に発表
2023-07-16
コメント 0
1557
PHP関数コンテナ化...
記事の紹介::この記事では主に PHP 関数コンテナーについて紹介します。PHP チュートリアルに興味のある学生は参考にしてください。
2016-08-08
コメント 0
1115

HTMLページでのJSを使用したパラメータ取得メソッドのサンプルコード共有
記事の紹介:ここでは、QUESTRING パラメーターを使用して URL を取得するための JAVASCRIPT クライアント ソリューションを示します。これは、ASP の request.querystring および PHP の $_GET に相当します。
2017-04-24
コメント 0
4148