合計 10000 件の関連コンテンツが見つかりました

Baidu Map API を使用して PHP で運転軌跡を追跡する方法
記事の紹介:Baidu Map API を使用して PHP で走行軌跡を追跡する方法 インターネットとモバイル インターネットの急速な発展に伴い、地図の位置確認と走行軌跡の追跡は多くの Web アプリケーションの重要な機能になりました。 Baidu Map API の強力な機能と使いやすさにより、Baidu Map API は多くの開発者の最初の選択肢となっています。この記事では、PHP 言語と Baidu Map API を組み合わせて使用し、運転軌跡追跡を実装する方法を紹介します。走行軌跡を追跡するには、まずユーザーの位置情報を取得し、その位置情報を地図上に描画する必要があります。
2023-07-29
コメント 0
1678
PHP と Amap API を使用して、地図のリアルタイム トラック追跡を作成します
記事の紹介:PHP と Amap API を使用して作成された地図のリアルタイム追跡追跡技術の発展と地理的位置情報に対する人々の需要の増加に伴い、地図は私たちの生活に欠かせないものになりました。リアルタイム軌跡追跡機能は、物流、交通管理などの多くの分野で広く使用されています。この記事では、PHP と Amap API を使用して、地図上にリアルタイムの軌跡追跡機能を作成する方法を紹介します。始める前に、必要なツールと環境を準備する必要があります。まず、AutoNavi を入手するには、AutoNavi 開発者アカウントが必要です。
2023-07-29
コメント 0
1485

予期せぬロストプレビュー: 「Bright Track Chasing」方向追跡作戦が始まろうとしています
記事の紹介:ロスト・イン・タイムは2月27日午前5時にアップデートされることが確認されており、ブライトレールは方向追跡作戦を遂行する予定で、イベント期間中は狂気レベルの収監者[エンフィールド][スターゲイザー]と高危険度の収監者[ 「プシラ」「マックィーン」 期間限定で追尾確率がアップしているので、欲しいキャラクターは見逃せない。予期せぬ紛失のお知らせ:指向性追跡作戦「明るい軌跡追跡」が始まります ■イベント時間:2月27日05:00~3月26日09:59 ■イベント内容:イベント期間中、狂気レベルの囚人【エンフィールド】【スターゲイザー】 』では、危険度の高い監禁者『プシラ』と『マックイーン』が期間限定で追跡確率アップ中!方向追跡では10回ごとにハイリスクまたは発狂レベルの収監者が必ず出現しますが、いつでもハイリスクまたは発狂レベルの収監者が出るとカウントがリセットされます。
2024-02-27
コメント 0
425
Keepで軌跡マップを生成する方法
記事の紹介:エクササイズの追跡をオンにし、携帯電話を接続したままにして、エクササイズ後にトラック マップのラベルを表示することで、トラック マップを生成できます。トラックグラフにはルート、時間、ペースが表示され、それらを共有できます。
2024-05-04
コメント 0
1079

自動運転と軌道予測についてはこの記事を読めば十分です!
記事の紹介:自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
2024-02-28
コメント 0
937

豊雲興で車両の軌跡を確認する方法 豊雲興で車両の軌跡を確認する方法
記事の紹介:Fengyunxing は走行軌跡を確認できますか? Fengyunxing 車の軌跡の表示に関するチュートリアル Fengyunxing アプリを開き、[サービス] をクリックします。サービスインターフェイスに入り、車の検索を選択し、ナビゲーションオプションをクリックします。最後に、カーナビゲーションインターフェイスを取得して、車の速度と軌跡を確認できます。
2024-06-19
コメント 0
438
キープ時にダイナミックなモーション軌跡を生成する方法
記事の紹介:Keep は、GPS 追跡、モーション センサー、アルゴリズム処理を統合することで動的なモーション軌跡を生成し、ユーザーがモーション データを正確に追跡し、スポーツ パフォーマンスを評価し、結果を共有し、モチベーションを高めて維持できるようにします。
2024-05-04
コメント 0
941

Amapでトラックビデオを作成する方法 Amapでトラックビデオを作成するプロセスを共有します。
記事の紹介:AMAP トラック ビデオは走行軌跡を記録し、運転プロセスをリアルタイムで表示します。ユーザーが移動ルートを検討したり、正確なナビゲーション案内を提供したりするのに便利です。 Amapで軌跡ビデオを作成する方法を知りたい友達はたくさんいます。記事を読めばわかります。 Amapでトラックビデオを作成する方法 1. まず、Amapを開き、マイページのドロップダウンボタンをクリックして足跡機能を表示します。 2. 次に、新しいページで「マイレージ」をクリックします。 3. 最後に、上にスライドして走行距離ビデオを選択し、クリックします。
2024-07-11
コメント 0
1134
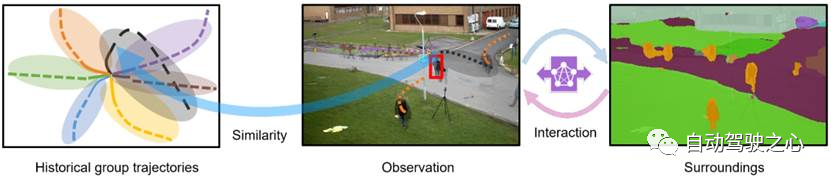
歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
記事の紹介:軌道予測はここ 2 年間で注目を集めていますが、そのほとんどは車両の軌道予測の方向に焦点を当てています。本日、自動運転ハートは、歩行者軌道予測のアルゴリズムを NeurIPS - SHENet で共有します。制限されたシーンでは、人間の行動パターンは通常、ある程度、限られたルールに従っています。この仮定に基づいて、SHENet は暗黙のシーン ルールを学習することで人の将来の軌道を予測します。この記事は自動運転ハート様よりオリジナル記事として認定されました!著者の個人的な理解では、人間の動きにはランダム性と主観性があるため、現時点では人の将来の軌道を予測することは依然として困難な問題です。ただし、制約のあるシーンでの人間の動きのパターンは、シーンの制約 (フロア プラン、道路、障害物など) や人間対人間、または人間対オブジェクトの対話性によって異なることがよくあります。
2023-10-17
コメント 0
1834

「オペレーションデルタ」スケアリークロー・マイ・シャオウェンのスキルガイド
記事の紹介:デルタ・オペレーション・スケアリー・クロー・マイ・シャオウェンは、多くのプレイヤーからスーパー・ラットマンと呼ばれるステルス活動と偵察活動を得意とするオペレーターですが、一部のプレイヤーはデルタ・オペレーション・スケアリー・クロー・マイ・シャオウェンのスキルをまだ知りません。見てみましょう 編集者が「オペレーション デルタ」のドレッドクロー マイ シャオウェンの詳細なスキル ガイドをお届けしました。 「オペレーション・デルタ」スケアリー・クロウ・マイ・シャオウェンのスキルガイド: 1. 信号解読者: 定期的に敵の電子信号をスキャンし、コンタクト レンズに追跡軌道ラインを表示します。追跡ラインの最大数は 6 です。 2. フラッシュ ホバークラフト: 遮るもののない敵目標を自動的にロックし、盲目にします。選択した軌道線に向かって投げると、ホバークラフトは自動的に敵の信号源の位置に向かって飛行します。 3. データ投げナイフ: データ投げナイフを投げて敵にダメージを与え、近くのローカル機器をハッキングすることができます。
2024-08-22
コメント 0
893

「オペレーションデルタ」スケアリークロー・マイ・シャオウェンのスキル紹介
記事の紹介:「オペレーション・デルタ」スケアリー・クロー・マイ・シャオウェンは、多くのプレイヤーからスーパー・ラットマンと呼ばれるステルスと偵察作戦を得意とするオペレーターですが、「デルタ・オペレーション」スケアリー・クロー・マイがどのようなスキルを持っているのかをまだ知らないプレイヤーもいます。シャオウェンはここにいくつかあります。編集者はプレイヤーにオペレーション デルタ クローのスキルを紹介します。マイ シャオウェンです。オペレーション デルタにおけるマイ シャオウェンのスキルは何ですか: 1. 信号解読装置: 敵の電子信号を定期的にスキャンし、コンタクト レンズに追跡軌道ラインを表示します。追跡ラインの最大数は 6 です。 2. フラッシュ ホバークラフト: 遮るもののない敵目標を自動的にロックし、盲目にします。選択した軌道線に向かって投げると、ホバークラフトは自動的に敵の信号源の位置に向かって飛行します。 3. データ投げナイフ: データ投げナイフを投げると敵にダメージを与え、近くの機器をハッキングして作業に影響を与える可能性があります。
2024-08-22
コメント 0
934

uniappでリアルタイム位置決めと軌跡再生を実装する方法
記事の紹介:uniapp でリアルタイム測位と軌跡再生を実装する方法 1. はじめに モバイル インターネットの発展に伴い、測位機能の需要が徐々に増加しています。シェア自転車、旅行ナビゲーション、物流追跡などの多くのアプリケーション シナリオでは、リアルタイムの測位機能と軌跡再生機能が非常に重要です。この記事では、uniapp でリアルタイム位置決めと軌跡再生を実装する方法と、具体的なコード例を紹介します。 2. リアルタイム測位機能を実装するための関連プラグインの導入 まず、uniapp プロジェクトに関連測位プラグインを導入します。一般的に使用される位置決めプラグインには、uni-
2023-10-19
コメント 0
1765

Amapでドライブルートを記録する方法
記事の紹介:Amap ソフトウェアはリアルタイムで更新され、ナビゲーションに出かけるときに交通情報をタイムリーにブロードキャストすることができます。また、よくわからない場合は、急いで編集者に従ってください。 PHP へ 中国語の Web サイトをチェックしてください。 Amap で走行ルートを記録する手順のリスト 1. Amap APP を開き、右下隅の [My] オプションをクリックします。 2. パーソナルセンターページで、右上隅の[設定]ボタンを選択してクリックします。 3. 設定ページに入り、[足跡とよく行く場所の管理] 機能を見つけます。 4. 管理ページの[フットプリント設定]を選択して開きます。 5. フットプリント設定インターフェースで [フットプリントを有効にする] ボタンをクリックすると、Amap が移動トラックの記録を開始します。
2024-06-19
コメント 0
969

自動運転のためのエンドツーエンドの計画手法のレビュー
記事の紹介:この記事は自動運転の心臓公開アカウントの許可を得て転載しています. 転載については、出典元にご連絡ください. 1. WovenPlanet (トヨタ子会社) の計画: UrbanDriver2021 この記事は 21 年前の記事ですが、多くの新しい記事は比較のベースラインとして使用するため、メソッドを理解して検討する必要があります。主に、PolicyGraradients を使用して、State->Recent Action のマッピング関数を学習します。このマッピング関数により、実行全体が軌道は段階的に推定できます。最終的な損失は、この推定によって与えられる軌道です。できるだけエキスパートの軌道に近づけてください。当時の効果はかなり良好だったはずなので、新しいアルゴリズムのベースラインになる可能性があります。 2. 南洋理工大学計画 1 コンディ
2023-10-30
コメント 0
843

幾何学スケッチパッド上で中点の軌跡をなぞる具体的な操作方法
記事の紹介:1. [円ツール]を選択して 2 つの別々の円を描き、ラベルを変更して、2 つの円上の任意の点 E と F をそれぞれ選択します。 2. 点E、Fを選択し、[作図]-[線分]コマンドを選択し、線分EFを選択し、[作図]-[中点]コマンドを選択して、線分EFの中点Gを描画します。 3. E点とF点を選択し、[編集]-[操作ボタン]-[アニメーション]コマンドを選択します。点 E と F を同じ方向 (反時計回りまたは時計回り) に移動させることも、点 E と F を反対方向 (双方向) に移動させることもできます。 4. 点 G を選択し、[表示]-[中点トラッキング]コマンドを選択します。 E と F が同じ方向に移動した場合の最終的な効果を図に示します。 5. 点 E と F は逆の動きで示されています。線分の中点を変えるとより美しい絵が描ける
2024-04-17
コメント 0
1046
AMAP マップの対向車に対するカーブ リマインダーの原理は何ですか?
記事の紹介:Amapのカーブにおける対向車リマインダーの原理は、車両の位置、速度、方向などの情報をリアルタイムで取得し、道路状況と車両の走行軌跡を分析し、起こり得る対向車の状況を予測し、車両に早期警告を発することです。道路交通の安全とドライバーの安全。カーブでの対向車リマインダー機能の実装には主に、1. 衛星測位、2. データ収集、3. インテリジェント アルゴリズム、4. 早期警告リマインダー、5. データ フィードバックが含まれます。
2023-09-22
コメント 0
5740
清華大学とアイデアルは、自動運転機能を向上させるための視覚的な大規模言語モデルである DriveVLM を提案しました。
記事の紹介:自動運転の分野では、研究者らはGPT/Soraなどの大型モデルの方向性も模索している。自動運転は、生成型AIと比較して、最近のAIにおいて最も研究開発が盛んな分野の一つでもあります。完全自動運転システムを構築するために人々が直面する主な課題は、悪天候、複雑な道路レイアウト、予測不可能な人間の行動など、複雑で予測不可能なシーンを含む AI のシーン理解です。現在の自動運転システムは通常、3D 認識、動作予測、計画の 3 つの部分で構成されます。具体的には、3D 認識は主に身近な物体の検出と追跡に使用されますが、珍しい物体とその属性を識別する能力には限界があります。一方、動作予測と計画は主に物体の軌道動作に焦点を当てますが、通常、物体と車両の関係は無視されます。 。 間
2024-02-24
コメント 0
733
Amapで航行記録を見つける方法
記事の紹介:Amap で航海記録を検索する方法: Amap を開き、「マイ」をクリックし、「航海記録」を見つけて航海記録を表示します。特定の記録をクリックすると、ナビゲーション ルート、時間、停止地点、走行軌跡が表示されます。また、地図を拡大/縮小して記録を共有することもできます。レコードを管理して、レコードをクリアまたはエクスポートします。
2024-05-05
コメント 0
648


