合計 10000 件の関連コンテンツが見つかりました

SOTA をリアルタイムで追加すると、大幅に増加します。 FastOcc: より高速な推論と展開に適した Occ アルゴリズムが登場しました。
記事の紹介:上記と著者の個人的な理解は、自動運転システムにおいて、認識タスクは自動運転システム全体の重要な要素であるということです。認識タスクの主な目的は、自動運転車が道路を走行する車両、路側の歩行者、運転中に遭遇する障害物、道路上の交通標識などの周囲の環境要素を理解して認識できるようにすることで、それによって下流のシステムを支援できるようにすることです。モジュール 正しく合理的な決定と行動を行います。自動運転機能を備えた車両には、通常、サラウンドビューカメラセンサー、ライダーセンサー、ミリ波レーダーセンサーなど、さまざまな種類の情報収集センサーが装備されており、自動運転車が正確に認識し、認識できるようにします。周囲の環境要素を理解することで、自動運転車が自動運転中に正しい判断を下せるようになります。頭
2024-03-14
コメント 0
1039

トヨタの電気自動車は、模擬マニュアルギアボックスを追加して従来の運転体験を再構築
記事の紹介:6月15日のニュースによると、トヨタはドライバーにユニークな体験をもたらすために、将来の電気自動車に模擬マニュアルトランスミッションを導入する予定だという。トヨタ自動車工場部門の加藤武夫社長によると、この計画は2026年から実施される予定だという。トヨタは、従来のマニュアル運転の感覚と電気自動車の環境上の利点を組み合わせて、マニュアルトランスミッション車を好む消費者により多くの選択肢を提供したいと考えている。シミュレートされたマニュアル トランスミッションには、従来の内燃機関車両の運転体験をシミュレートするためのさまざまな機能が含まれます。マニュアルシフトやエンジン音などにより、ドライバーは本当の運転の歓びを感じることができます。トヨタの広報担当者は、このシステムはクラッチが不適切に操作された場合にエンジンを停止させるおなじみの機能も提供するが、最終量産モデルからは廃止される可能性があると明らかにした。トヨタは以前にXiong氏を特定していた
2023-06-16
コメント 0
770

ReSimAD: 仮想データを通じて知覚モデルの汎化パフォーマンスを向上させる方法
記事の紹介:上記および著者の個人的な理解は、自動運転車のセンサー レベルでのドメインの変化は非常に一般的な現象であるということです。たとえば、さまざまなシーンや場所、さまざまな照明や気象条件にある自動運転車には、さまざまなセンサーが装備されています。自動運転車の場合、上記は自動運転領域における典型的な違いと考えることができます。このドメインの違いが自動運転に課題をもたらします。その主な理由は、古いドメインの知識に依存する自動運転モデルは、追加コストなしでこれまで見たことのない新しいドメインに直接展開することが難しいためです。したがって、この論文では、ドメイン移行のための新しい視点と方法を提供する再構築シミュレーション認識 (ReSimAD) スキームを提案します。具体的には、陰的再構成手法を利用してドライビングレンジを取得します。
2024-01-17
コメント 0
1325

キャッシュを使用して Golang で自動運転データを処理するためのヒント。
記事の紹介:自動運転技術の発展により、大量のデータ処理が必要になります。特に車載機器では、安全な運転を確保するために、データの送信と処理がタイムリーかつ効率的に行われる必要があります。 Golang は、大規模なデータの同時実行と効率的な処理を特徴とする軽量のオープンソース プログラミング言語です。この記事では、キャッシュを使用して Golang で自動運転データを処理し、データ処理の効率を向上させる方法を紹介します。 1. キャッシュの役割 自動運転車のデータ処理プロセスでは、大量のデータを収集、処理、保存、送信する必要があります。右
2023-06-21
コメント 0
1046

Baidu Apollo、L4自動運転に対応した世界初の大型モデル「Apollo ADFM」を発売
記事の紹介:5月15日、Baidu Apolloは武漢Baidu キャロット Auto Robot Zhixing Valleyで2024年アポロデーを開催し、過去10年間におけるBaiduの自動運転における大きな進歩を包括的に実証し、大型モデルと乗客の安全性の新たな定義に基づいた技術的飛躍をもたらした。世界最大の自動運転ネットワークである百度は、自動運転を人間の運転よりも安全なものにしました。このおかげで、より安全、より快適、環境に優しい、低炭素の旅行方法が理想から現実へと変わりつつあります。百度グループ副社長兼インテリジェント・ドライビング・ビジネス・グループ社長の王雲鵬氏はその場で「自動運転車を開発するという私たちの本来の目的は、より良い旅行への人々の高まる切望を満たすことだ。人々の満足こそが私たちの原動力である。なぜなら安全性、とても美しいので、見ることができて嬉しいです
2024-06-04
コメント 0
1267

7 つの豪華な HTML5 読み込みアニメーション効果の詳細な紹介
記事の紹介:大きなデータを送信しているとき、または複雑な操作を待っているときは、ユーザーに思い出させるために小さな読み込みアニメーションを表示するのが最善です。この記事では、HTML5 に基づいた非常に豪華な読み込みアニメーション効果をいくつか紹介します。気に入っていただければ幸いです。 1. HTML5 Canvas は非常にクールなローディング アニメーションを実装しています。今回は、純粋な CSS3 で実装されているギアのローディング アニメーションに似たアニメーションです。回転と同様の効果。 オンラインデモ ソースコードダウンロード 2.HT..
2017-03-07
コメント 0
1970

知能運転知覚システムの試験技術を詳しく解説した記事
記事の紹介:はじめに 人工知能とそのソフトウェアおよびハードウェア技術の進歩により、自動運転は近年急速に発展しています。自動運転システムは、民間車両運転支援システム、自律物流ロボット、ドローンなどの分野で活用されています。認識コンポーネントは自動運転システムの中核であり、車両が内部および外部の交通環境に関する情報を分析および理解できるようにします。しかし、他のソフトウェア システムと同様に、自動運転認識システムもソフトウェアの欠陥に悩まされています。さらに、自動運転システムは安全性が重要なシナリオで動作するため、そのソフトウェアの欠陥が壊滅的な結果を招く可能性があります。近年、自動運転システムの不具合による死傷事故が多発しています。自動運転システムの試験技術は、学界や産業界から広く注目を集めています。企業や研究機関は、仮想シミュレーションテスト、現実の道路を含む一連のテストを提案しています。
2023-04-11
コメント 0
1737

Crazy Racing Crazy でバイクを作る方法 Crazy Racing Crazy でバイクを作る方法
記事の紹介:Crazy Racing は、自分で作った探査車に乗って遠くの惑星の丘を冒険しながら、エキサイティングなアーケードの旅にあなたを招待します。自分だけの車をデザインして銀河の王になろう! Baoshuang Crazy Racing でバイクを作成する方法: 1. まず、Baoshuang Crazy Racing ゲームを開きます。 2. 次に、メイン ゲーム ページに入り、レーシング オプションをクリックします。 3. 最後に、自分のニーズとゲームのプロンプトに従って車を組み立てます。 Crazy Racing は楽しいドライビング シミュレーション モバイル ゲームです。このゲームの画質は非常に優れており、あらゆる種類のレーシングカーがあり、プレイヤーはレーシングカーの前後の動きをシミュレートし、実際の操作感を感じ、さまざまな難易度のトラックを通過できます。
2024-09-25
コメント 0
748

スマートカードライバー監視システムを 1 つの記事で読む
記事の紹介:Driver Monitoring System、略してDMSとは、英語のDriver Monitor System、つまりドライバーモニタリングシステムの略称です。主にドライバーの識別、ドライバーの疲労運転、危険行為の検出などの機能を実現します。 Ford DMS System 01 法規制の後押しを受けて、DMS は開発の高速レーンに入っていますが、現段階で量産が開始されている L2 ~ L3 自動運転では、実際には特定の条件下でしか実現できません。ドライバーは廃棄に間に合うように車両を引き取る必要があります。したがって、ドライバーが自動運転を信頼しすぎて、運転プロセスの制御を放棄したり弱めたりすると、特定の事故が発生する可能性があります。 DMS ドライバー監視システムの導入により、この問題を効果的に軽減できます。マグナDMSシステム、
2023-04-11
コメント 0
1976
テスラの完全自動運転車は子供のダミー人形に3回衝突し、衝突後も止まらずに加速した
記事の紹介:ダン・オダウド氏は組み込み開発会社Green Hills Softwareの最高経営責任者(CEO)で、テスラの自動運転ソフトウェアのテストなど、セキュリティシステムでの安全でないソフトウェアの使用を禁止する「The Dawn Project」と呼ばれる取り組みを昨年立ち上げた。実際に道路を横断する子供に遭遇したときの自動運転車の反応をシミュレートするために、The Dawn Project は最近新しいテストを実施し、その結果、Model 3 には FSD Beta 10.12.2 自動運転ソフトウェアが搭載されていることがわかりました。子供の人型モデルに衝突する可能性があります: テスト中、モデル 3 はモデルに激しく衝突し、モデルのコンポーネントが分離しました。
2023-04-09
コメント 0
1748

CLIP-BEVFormer: BEVFormer 構造を明示的に監視して、ロングテール検出パフォーマンスを向上させます。
記事の紹介:上記および筆者の個人的な理解: 現在、自動運転システム全体において、認識モジュールが重要な役割を果たしている。道路を走行する自動運転車は、認識モジュールを通じてのみ正確な認識結果を得ることができる。下流の規制および制御モジュール自動運転システムでは、タイムリーかつ正確な判断と行動決定が行われます。現在、自動運転機能を備えた自動車には通常、サラウンドビューカメラセンサー、ライダーセンサー、ミリ波レーダーセンサーなどのさまざまなデータ情報センサーが搭載されており、さまざまなモダリティで情報を収集して正確な認識タスクを実現しています。純粋な視覚に基づく BEV 認識アルゴリズムは、ハードウェア コストが低く導入が容易であるため、業界で好まれており、その出力結果はさまざまな下流タスクに簡単に適用できます。
2024-03-26
コメント 0
665

何暁鵬氏がテスラFSDとロボタクシーについて語る:エンドツーエンド+大型モデルでL4レベルの自動運転を実現可能
記事の紹介:7月25日のニュースによると、Xpeng MotorsのAIインテリジェント運転技術カンファレンスと1024 Technology Dayが7月30日火曜日に開催される。このイベントは、小鵬汽車の何小鵬会長も微博でテスラの新バージョンのFSD(完全自動運転)とロボタクシー(自動運転タクシー)についての見解を表明し、大きな注目を集めた。何暁鵬氏は、今年のFSDは能力の点でこれまでのテスラの自動運転とは全く異なっており、それを非常に高く評価していると述べた。 1. 同時に、同氏は、「エンドツーエンド」関連の問題について最近数人の L4 プロジェクト リーダーと議論した結果、業界では一般的に「エンドツーエンド」テクノロジーが L2 または L3 により適していると考えていることが判明したことにも言及しました。自動運転レベル、L4レベルではない。しかし、He Xiaopeng 氏は異なる見解を持っており、大型モデルを組み合わせた「エンドツーエンド」テクノロジーを強く信じています。
2024-07-25
コメント 0
927

Beauty Cameraで写真を切り出す方法_Beauty Cameraで写真を切り出す詳しいチュートリアル
記事の紹介:アプリを開いて「ビューティー」に入り、変更する写真を選択します。背景には人、車、一般的に街路の風景など、多くのものがあることが最適です。 *ソフトフォーカスの選択は、切り抜きを汚したり塗りつぶしたりするために使用されます。歩行者や移動する車両など、特殊な効果が必要な部分を消しゴムで消します。エフェクトのダイナミックブラーを選択して、自分の気分に合わせてぼかしの程度を調整してください。
2024-06-05
コメント 0
382
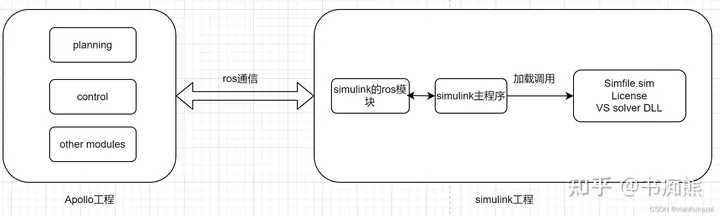
Apollo は共同シミュレーションのために Carsim/TruckSim と提携
記事の紹介:1. バックグラウンドシミュレーションは自動運転の研究開発において重要な役割を果たしており、研究開発の効率を大幅に向上させ、アルゴリズムの信頼性を保証することができます。 Baidu Apollo システムは、優れたオープンソース プラットフォームなので、自動運転の学習に興味がある友人による研究に非常に適しています。さらに、Carsim/Trucksim は、高く評価されている古典的な車両ダイナミクス シミュレーション ツールです。本稿では、ApolloとTrucksimを組み合わせてローカルリアルタイムシミュレーションを実現する方法を紹介します。初心者がシミュレーション プラットフォームを構築し、Apollo システムを学習するのに適しています。 2. アーキテクチャ設計 Apollo プロジェクトのコア コードは C++ で実装されています。 Trucksim の一般的なインターフェイスには、simulink、Python、C 言語などがあります。
2024-01-13
コメント 0
1311

HaoMo Zhixing CEO、Gu Weihao氏: 都市シナリオにおいてMANAが直面する6つの大きな課題と新たなアップグレード
記事の紹介:「データドリブンの自動運転 3.0 の時代が到来しました。知覚、認知、モード、データの 4 つの技術的条件が並行して確立されて初めて、真の自動運転の新時代に入ることができます。私たちが行うすべてのことは、 「データ主導の意思決定を行うためのチャネルとコンピューティングセンター。データをより効率的に取得して知識に変換できるようにするためのチャネルとコンピューティングセンター。Haomoは自動運転3.0時代に向けて全力で疾走します!」 9月13日に開催された第6回HAOMO AI DAYでは、 Haomo Zhixing CEOのGu Dr. Wei Hao氏は「自動運転と自動運転の3.0時代」をテーマに講演し、業界で初めて「自動運転はデータドリブンの時代に入った」という業界の判断を提起した。 3.0時代」についても紹介し、最先端のデータを基にしたMANAデータインテリジェンスシステムについても紹介した。
2023-04-14
コメント 0
1168

Xiaomi SU7 Pro および Max アップグレード: よりスマートなエンドツーエンド駐車を実現
記事の紹介:5月14日のニュースによると、Xiaomi Motorsは最近、車両システムが最新バージョンにアップグレードされ、Xiaomi SU7 ProとMaxがより高度なエンドツーエンドのバレーパーキング機能を実装したことを明らかにしました。この機能の導入により駐車効率が向上し、最高速度は23km/hまで向上しました。この新機能では、スペースが限られている場合でも、実際のユーザーの反転および回避動作をシミュレートすることができ、ユーザーが独立して反転および移動操作を実行できるようになります。編集者の理解によれば、このアップグレードの核心は、これまで認識、意思決定、計画に使用されていた複数の独立したモジュールを置き換える、エンドツーエンドの大規模モデルの採用にあります。現在、インテリジェント運転システムは、画像入力端から直接運転軌跡を生成できます。この大規模なエンドツーエンド モデルは、これまで人間の思考をシミュレートする最も奥深いインテリジェント運転アルゴリズムです。中間モジュールが省略されているため、
2024-06-01
コメント 0
984
クラウドベースおよび車ベースの MapNeXt がすべて完了しました。次世代オンライン高精度地図の構築
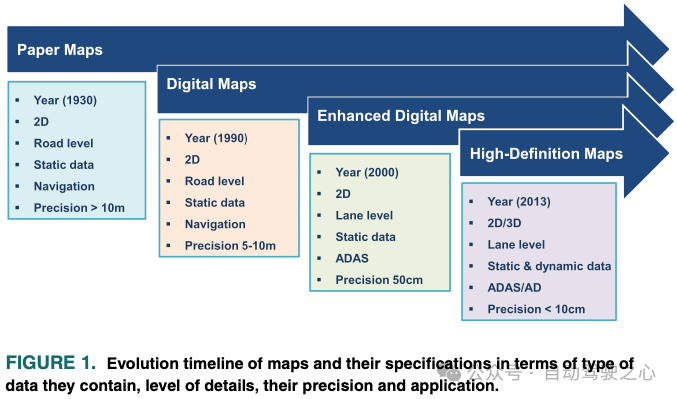
記事の紹介:上記および著者の個人的な理解 協調的で接続された自動化されたモビリティ (CCAM) では、インテリジェント運転車両が周囲の環境を認識、モデル化、分析する能力が強化されるほど、車両はより認識し、理解して意思決定を行うことができます。複雑な運転シナリオを安全かつ効率的に実行できます。高精度 (HD) マップは、センチメートルレベルの精度と車線レベルのセマンティック情報で道路環境を表現し、インテリジェント モビリティ システムの中核コンポーネントであり、CCAM テクノロジーを実現する重要な要素となっています。これらのマップは、自動運転車両が周囲の状況を理解する上で強力な利点を提供します。 HD マップは、物理センサー (マップ)、つまり LIDAR、カメラ、GPS、IMU からの知識を統合して道路環境のモデルを構築するため、隠れセンサーまたは仮想センサーともみなされます。 HDマップ
2024-01-31
コメント 0
874
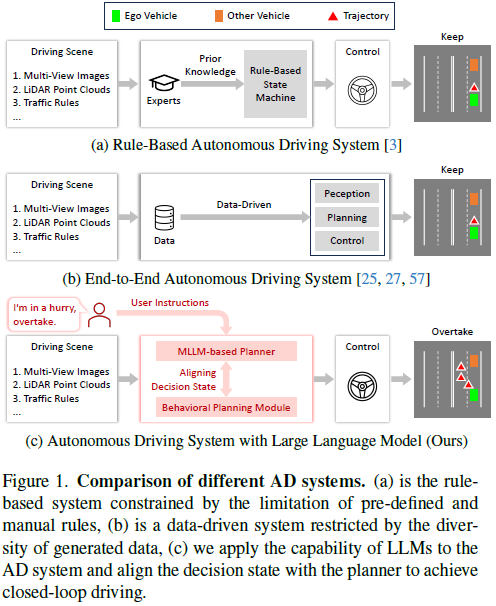
ループを閉じるために全力を尽くしてください! DriveMLM: LLM と自動運転行動計画を完全に組み合わせます。
記事の紹介:上記と著者の個人的な理解は、大規模な言語モデルがインテリジェントな運転のための新しい世界を切り開き、人間のような思考と認知能力をもたらしたというものです。この記事では、自動運転 (AD) における大規模言語モデル (LLM) の可能性について詳しく説明します。そこでシミュレーション環境で閉ループ自動運転を実現できるLLMベースのADフレームワークであるDriveMLMが提案されている。具体的には、(1) この論文は、既製の動作計画モジュールに基づいて決定状態を標準化することで、言語決定と車両制御コマンドの間のギャップを埋める、(2) マルチモーダル LLM (MLLM) を使用して AD をモデル化する、という点です。システム 行動計画モジュールがモデル化されており、このモジュール AD システムは、運転ルール、ユーザー コマンド、およびさまざまなセンサー (カメラ、レーザーなど) からの情報を使用します。
2024-01-05
コメント 0
1235

カリフォルニア州民は深く後悔:自動運転の信頼性は本当に不安であり、無人タクシーの拷問は非常に苦痛である
記事の紹介:8月11日、米国で最も保守的な地域であるカリフォルニア州で、無人タクシーが合法的に道路を走行できるかどうかを議論する公聴会が開催された。クルーズの最高経営責任者(CEO)カイル・フォークト氏は、6時間の討論の末、自動運転支持派が3対1の投票で地滑り的な勝利を収めたとサンフランシスコで発表、L4自動運転技術をサポートするタクシー数千台が今後6か月以内に発売され、あらゆるサービスを提供する予定だ。地元住民への気象サービス(出典:クルーズ) しかし、カリフォルニア州陸運局が無人タクシーの禁止を解除した1週間後、同氏は自分の決定を後悔し、ただちに厳格な規制措置を発動した。自動運転タクシーがわずか 1 週間で成し遂げたことは驚くべきものです
2023-08-29
コメント 0
1281

L3は遅くとも来年上半期に発売される予定:理想的なエンドツーエンド自動運転と大幅に向上した性能
記事の紹介:最近、生成 AI 技術の台頭により、多くの新しい自動車製造勢力が視覚言語モデルと世界モデルの新しい方法を模索しており、エンドツーエンドのインテリジェント運転新技術が共通の研究方向になっているようです。先月、Li Autoはエンドツーエンド+VLMビジュアル言語モデル+ワールドモデルの第3世代自動運転技術アーキテクチャをリリースした。このアーキテクチャは、インテリジェントな運転動作を体現し、AI の情報処理効率を向上させ、複雑な道路状況を理解して対応する能力を強化します。 Li Xiang 氏はかつて、ほとんどのアルゴリズムでは識別して処理することが難しい稀な運転環境に直面しても、視覚言語モデルである VLM (Visual Language Model) が理論的に自動運転の能力を体系的に向上させることができると公開共有で述べました。
2024-08-07
コメント 0
586
