
コース 初級 2985
コース紹介:質問がある場合は、WeChat を追加してください: Le-studyg; このコースは、コンピューター プログラミング言語の中核となる概念、原則、アイデアを徹底的に分析します。このコースを学習することで、学生はプログラミング言語の基本要素を習得し、さまざまなプログラミング パラダイムの長所と短所、およびプログラミング言語の哲学的な考え方を理解します。このコースは理論と実践の組み合わせに重点を置き、学生のプログラミング的思考と実践的な能力を養い、将来の学習とキャリアのための強固な基盤を築きます。

コース 上級 9980
コース紹介:このコースは、重慶のリーダーのソフトウェア開発における 10 年間の経験を統合したもので、ソフトウェア アーキテクチャに焦点を当て、Prism や ReactiveUI などのフレームワークを使用してモジュール式のリアクティブ プログラミング プロジェクトを作成するため、PC 開発に秘密はありません。このコースで説明するモジュールの内容は次のとおりです。 PC 開発モジュール: シェル モジュール (プログラム エントリ)、コア モジュール (ダイアログ ボックス、列挙、拡張タイプ、ヘルプ タイプ、IOC コンテナ、言語管理、インターフェイス)、UI 一般モジュール (テンプレート)スタイル、転送コンバータ、フォントライブラリ、画像、言語リソース)、システム構成モジュール、キャッシュモジュール、ログモジュール、ハードウェアモジュール(PLC、コントロールカード、カメラ(双海康ロボット)、光学機械、フラットパネル検出器、X線管、スキャナー コードガン) 、シリアルポート)、ビジネスモジュール(共有インターフェース)

コース 中級 38267
コース紹介:「PHP WeChat インターフェース開発実践プロジェクト チャットボット + WeChat Payment」 WeChat のアクティブ ユーザーは現在 8 億人です。WeChat マーケティングは過去 2 年間で最も注目されている WEB 開発アプリケーションです。どの企業も WeChat パブリック アカウントを開発する必要があります。WeChat 開発を学ぶなら、自分でアウトソーシング プロジェクトを引き受け、企業向けのマイクロ公式 Web サイト、マイクロ モール、マイクロ ディストリビューション、WeChat ゲームを開発し、富への道を歩み出すことができます。

コース 中級 11270
コース紹介:「独習 IT ネットワーク Linux ロード バランシング ビデオ チュートリアル」では、主に nagin の下で Web、lvs、Linux 上でスクリプト操作を実行することで Linux ロード バランシングを実装します。
2017-05-16 16:40:04 0 2 816
ブラウザのキャッシュをプログラムでクリアするにはどうすればよいですか?
2023-08-01 12:05:53 0 2 690
javascript - プログラミングの初心者として、エディターを使用して jQuery または thinkphp のソース コードをコピーする必要がありますか?
2017-06-05 11:07:36 0 3 590
2023-08-03 16:05:24 0 1 550
phpstudyはインターネットに接続していないと起動できないことが分かりました。
インターネットに接続されていないマシンでは phpstudy プログラムを起動できないことがわかりましたが、解決策はありますか?ありがとう
2018-07-12 09:50:17 0 4 1296
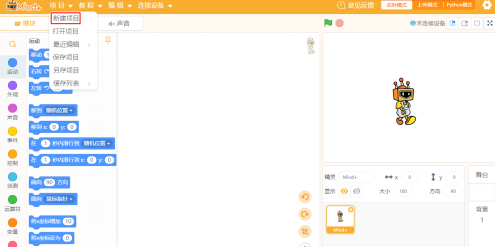
コース紹介:Mind+プログラミングは皆さんご存知かと思いますが、Mind+プログラミングを使って歩行ロボットを作る方法はご存知でしょうか?次の記事ではMind+プログラミングを使って歩行ロボットを作る操作方法を紹介していますので、興味のある方はぜひご覧ください。下に。 Mind+ を開き、マウスの左ボタンで [プロジェクト]-[新しいプロジェクト] をクリックし、新しいエルフを作成し、エルフ名を [Walking Robot] に変更します; [イベント] をクリックし、[リトル グリーン フラグ] をプログラミング インターフェイスにドラッグします。 [移動]をクリックし、[小さな緑の旗]の下に[右に(15)度回転]を接続し、[演算子]をクリックして、[(1)と(10)の間の乱数を取得する]をプログラミングインターフェイスにドラッグアンドドロップし、次に[右回転(15)度]に挿入し、[モーション]をクリックして[回転方法を次のように設定します]
2024-03-06 コメント 0 1055

コース紹介:「ロボット工学専攻」と「産業ロボット専攻」は一般に全く同じ専攻ではありませんが、一部重複する場合があります。それらの違いを見てみましょう: 1. ロボット工学専攻: これは、産業用ロボット、サービス ロボット、医療用ロボット、農業用ロボットなどを含む、さまざまな種類のロボット工学をカバーする幅広い分野です。ロボット工学専攻の授業内容には、機械設計、電子工学、自動制御、コンピュータプログラミング、人工知能などが含まれ、ロボットのさまざまな応用分野における学生のスキルを育成することを目的としています。 2. 産業用ロボット専攻: 製造および産業用途におけるロボット技術に重点を置いています。産業用ロボットのプロフェッショナル
2023-09-13 コメント 0 1514

コース紹介:目次: テレグラムボットとは何ですか? 前提条件 Telegram でボットを作成する Python環境のセットアップ ボットコードの作成 ボットの導入 結論 1. Telegram ボットとは何ですか? ボットは実行される小さなアプリケーションです。
2024-09-19 コメント 0 1121

コース紹介:C++ でロボット制御とロボット ナビゲーションを実装するにはどうすればよいですか?ロボットの制御とナビゲーションはロボット技術の非常に重要な部分です。 C++ プログラミング言語では、さまざまなライブラリとフレームワークを使用してロボットの制御とナビゲーションを実装できます。この記事では、C++ を使用してロボットを制御し、ナビゲーション機能を実装するためのコード例を作成する方法を紹介します。 1. ロボット制御 C++ではシリアル通信やネットワーク通信を利用してロボット制御を実現できます。以下は、シリアル通信を使用してロボットの動作を制御するサンプルコードです。
2023-08-25 コメント 0 1487
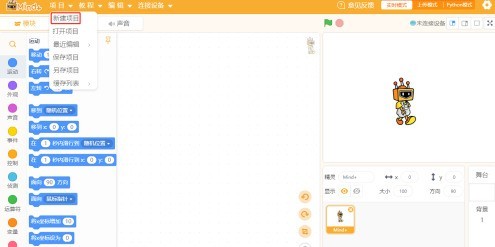
コース紹介:Mind+を開き、[プロジェクト]-[新規プロジェクト]を左クリックし、新規エルフを作成し、エルフ名を[Walking Robot]に変更します。 [Event] をクリックし、[Little Green Flag] をプログラミング インターフェイスにドラッグします。 [移動]をクリックし、[リトルグリーンフラッグ]の下に[右回転(15)度]を接続します。 [演算子]をクリックし、[(1)と(10)の間の乱数を取得]をプログラミングインターフェースにドラッグし、[右に(15)度]に挿入します。 [移動]をクリックし、[右に回って(1)と(10)の間でランダムな角度を取る]の下に[回転方法を左右反転に設定]をつなぎ合わせます。 [コントロール]をクリックし、[回転モードを左右反転に設定]の下にある[ループ実行]を接続します。 [移動]をクリックし、[ループ(10)ステップ]を繋ぎます。
2024-06-03 コメント 0 635
