

cvKMeans2均值聚类分析+代码解析+灰度彩色图像聚类

1 K-均聚类算法的基本思想 K-均聚类算法 是著名的划分聚类分割方法。划分方法的基本思想是:给定一个有N个元组或者纪录的数据集,分裂法将构造K个分组,每一个分组就代表一个聚类,KN。而且这K个分组满足下列条件:(1) 每一个分组至少包含一个数据纪录;(
1 K-均值聚类算法的基本思想
K-均值聚类算法是著名的划分聚类分割方法。划分方法的基本思想是:给定一个有N个元组或者纪录的数据集,分裂法将构造K个分组,每一个分组就代表一个聚类,K K-means算法的工作原理:算法首先随机从数据集中选取 K个点作为初始聚类中心,然后计算各个样本到聚类中心的距离,把样本归到离它最近的那个聚类中心所在的类。计算新形成的每一个聚类的数据对象的平均值来得到新的聚类中心,如果相邻两次的聚类中心没有任何变化,说明样本调整结束,聚类准则函数 已经收敛。本算法的一个特点是在每次迭代中都要考察每个样本的分类是否正确。若不正确,就要调整,在全部样本调整完后,再修改聚类中心,进入下一次迭代。这个过程将不断重复直到满足某个终止条件,终止条件可以是以下任何一个: (1)没有对象被重新分配给不同的聚类。 (2)聚类中心再发生变化。 (3)误差平方和局部最小。 K-means聚类算法的一般步骤: (1)从 n个数据对象任意选择 k 个对象作为初始聚类中心; (2)循环(3)到(4)直到每个聚类不再发生变化为止; (3)根据每个聚类对象的均值(中心对象),计算每个对象与这些中心对象的距离;并根据最小距离重新对相应对象进行划分; (4)重新计算每个(有变化)聚类的均值(中心对象),直到聚类中心不再变化。这种划分使得下式最小 K-均值聚类法的缺点: (1)在 K-means 算法中 K 是事先给定的,这个 K 值的选定是非常难以估计的。 (2)在 K-means 算法中,首先需要根据初始聚类中心来确定一个初始划分,然后对初始划分进行优化。 (3) K-means算法需要不断地进行样本分类调整不断地计算调整后的新的聚类中心因此当数据量非常大时算法的时间开销是非常大的。 (4)K-means算法对一些离散点和初始k值敏感,不同的距离初始值对同样的数据样本可能得到不同的结果。
2 OpenCV中K均值函数分析:
CV_IMPL int
cvKMeans2( const CvArr* _samples, intcluster_count, CvArr* _labels,
CvTermCriteria termcrit, int attempts, CvRNG*,
intflags, CvArr* _centers, double* _compactness )
_samples:输入样本的浮点矩阵,每个样本一行,如对彩色图像进行聚类,每个通道一行,CV_32FC3
cluster_count:所给定的聚类数目
_labels:输出整数向量:每个样本对应的类别标识,其范围为0- (cluster_count-1),必须满足以下条件:
cv::Mat data = cv::cvarrToMat(_samples),labels = cv::cvarrToMat(_labels);
CV_Assert(labels.isContinuous() && labels.type() == CV_32S &&
(labels.cols == 1 || labels.rows == 1)&&
labels.cols + labels.rows - 1 ==data.rows );
termcrit:指定聚类的最大迭代次数和/或精度(两次迭代引起的聚类中心的移动距离),其执行 k-means 算法搜索 cluster_count 个类别的中心并对样本进行分类,输出 labels(i) 为样本i的类别标识。其中CvTermCriteria为OpenCV中的迭代算法的终止准则,其结构如下:
#define CV_TERMCRIT_ITER 1
#define CV_TERMCRIT_NUMBER CV_TERMCRIT_ITER
#define CV_TERMCRIT_EPS 2
typedef struct CvTermCriteria
{
int type; int max_iter; double epsilon;
} CvTermCriteria;
max_iter:最大迭代次数。 epsilon:结果的精确性 。
attempts:
flags: 与labels和centers相关
_centers: 输出聚类中心,可以不用设置输出聚类中心,但如果想输出聚类中心必须满足以下条件:
CV_Assert(!centers.empty() );
CV_Assert( centers.rows == cluster_count );
CV_Assert( centers.cols ==data.cols );
CV_Assert( centers.depth() == data.depth() );
聚类中心的获得方式:(以三类为例)
double cent0 = centers->data.fl[0];
double cent1 = centers->data.fl[1];
double cent2 = centers->data.fl[2];
CV_IMPL int
cvKMeans2( const CvArr* _samples,int cluster_count,CvArr* _labels,
CvTermCriteriatermcrit, intattempts, CvRNG*,
int flags, CvArr* _centers, double* _compactness )
{
cv::Mat data = cv::cvarrToMat(_samples), labels= cv::cvarrToMat(_labels), centers;
if( _centers )
{
centers= cv::cvarrToMat(_centers);
// 将centers和data转换为行向量
centers= centers.reshape(1);
data= data.reshape(1);
// centers必须满足的条件
CV_Assert(!centers.empty());
CV_Assert(centers.rows== cluster_count );
CV_Assert(centers.cols== data.cols);
CV_Assert(centers.depth()== data.depth());
}
// labels必须满足的条件
CV_Assert(labels.isContinuous()&& labels.type()== CV_32S &&
(labels.cols == 1 || labels.rows == 1) &&
labels.cols + labels.rows - 1 == data.rows );
// 调用kmeans实现聚类,如果定义了输出聚类中心矩阵,那么输出centers
double compactness = cv::kmeans(data, cluster_count, labels,termcrit, attempts,
flags, _centers? cv::_OutputArray(centers) : cv::_OutputArray() );
if( _compactness )
*_compactness= compactness;
return 1;
}
double cv::kmeans( InputArray_data, int K,
InputOutputArray_bestLabels,
TermCriteriacriteria, intattempts,
intflags, OutputArray_centers )
{
const int SPP_TRIALS =3;
Mat data = _data.getMat();
// 判断data是否为行向量
bool isrow = data.rows == 1 && data.channels() > 1;
int N = !isrow ? data.rows : data.cols;
int dims = (!isrow? data.cols: 1)*data.channels();
int type = data.depth();
attempts= std::max(attempts, 1);
CV_Assert(data.dimstype == CV_32F && K> 0 );
CV_Assert(N >= K);
_bestLabels.create(N, 1, CV_32S, -1, true);
Mat _labels, best_labels = _bestLabels.getMat();
// 使用已初始化的labels
if( flags & CV_KMEANS_USE_INITIAL_LABELS)
{
CV_Assert((best_labels.cols== 1 || best_labels.rows== 1) &&
best_labels.cols*best_labels.rows == N&&
best_labels.type() == CV_32S&&
best_labels.isContinuous());
best_labels.copyTo(_labels);
}
else
{
if( !((best_labels.cols== 1 || best_labels.rows== 1) &&
best_labels.cols*best_labels.rows == N&&
best_labels.type() == CV_32S&&
best_labels.isContinuous()))
best_labels.create(N, 1, CV_32S);
_labels.create(best_labels.size(), best_labels.type());
}
int* labels = _labels.ptrint>();
Mat centers(K, dims, type), old_centers(K, dims, type), temp(1, dims, type);
vectorint> counters(K);
vectorVec2f> _box(dims);
Vec2f* box = &_box[0];
double best_compactness = DBL_MAX,compactness = 0;
RNG&rng = theRNG();
int a, iter, i, j, k;
// 对终止条件进行修改
if( criteria.type& TermCriteria::EPS)
criteria.epsilon = std::max(criteria.epsilon, 0.);
else
criteria.epsilon = FLT_EPSILON;
criteria.epsilon *= criteria.epsilon;
if( criteria.type& TermCriteria::COUNT)
criteria.maxCount = std::min(std::max(criteria.maxCount, 2), 100);
else
criteria.maxCount = 100;
// 聚类数目为1类的时候
if( K == 1 )
{
attempts= 1;
criteria.maxCount = 2;
}
const float* sample = data.ptrfloat>(0);
for( j = 0; j dims; j++ )
box[j] = Vec2f(sample[j], sample[j]);
for( i = 1; i N; i++ )
{
sample= data.ptrfloat>(i);
for( j = 0; j dims; j++ )
{
floatv = sample[j];
box[j][0] = std::min(box[j][0], v);
box[j][1] = std::max(box[j][1], v);
}
}
for( a = 0; a attempts; a++ )
{
double max_center_shift = DBL_MAX;
for( iter = 0;; )
{
swap(centers, old_centers);
/*enum
{
KMEANS_RANDOM_CENTERS=0, // Chooses random centers for k-Meansinitialization
KMEANS_PP_CENTERS=2, // Usesk-Means++ algorithm for initialization
KMEANS_USE_INITIAL_LABELS=1 // Uses the user-provided labels for K-Meansinitialization
};*/
if(iter == 0 && (a > 0 || !(flags& KMEANS_USE_INITIAL_LABELS)) )
{
if(flags & KMEANS_PP_CENTERS)
generateCentersPP(data, centers, K, rng, SPP_TRIALS);
else
{
for(k = 0; kK; k++)
generateRandomCenter(_box, centers.ptrfloat>(k), rng);
}
}
else
{
if(iter == 0 && a == 0 && (flags& KMEANS_USE_INITIAL_LABELS) )
{
for(i = 0; iN; i++)
CV_Assert( (unsigned)labels[i] unsigned)K);
}
//compute centers
centers= Scalar(0);
for(k = 0; kK; k++)
counters[k] = 0;
for(i = 0; iN; i++)
{
sample= data.ptrfloat>(i);
k= labels[i];
float*center = centers.ptrfloat>(k);
j=0;
#ifCV_ENABLE_UNROLLED
for(;j dims- 4; j += 4 )
{
float t0 = center[j] + sample[j];
float t1 = center[j+1] + sample[j+1];
center[j] = t0;
center[j+1] = t1;
t0 = center[j+2] + sample[j+2];
t1 = center[j+3] + sample[j+3];
center[j+2] = t0;
center[j+3] = t1;
}
#endif
for(; j dims;j++ )
center[j] += sample[j];
counters[k]++;
}
if(iter > 0 )
max_center_shift= 0;
for(k = 0; kK; k++)
{
if(counters[k]!= 0 )
continue;
// if somecluster appeared to be empty then:
// 1. find the biggest cluster
// 2. find the farthest from the center pointin the biggest cluster
// 3. exclude the farthest point from thebiggest cluster and form a new 1-point cluster.
intmax_k = 0;
for(int k1 = 1; k1 K; k1++ )
{
if( counters[max_k] counters[k1] )
max_k = k1;
}
doublemax_dist = 0;
intfarthest_i = -1;
float*new_center = centers.ptrfloat>(k);
float*old_center = centers.ptrfloat>(max_k);
float*_old_center = temp.ptrfloat>();// normalized
floatscale = 1.f/counters[max_k];
for(j = 0; jdims; j++)
_old_center[j] = old_center[j]*scale;
for(i = 0; iN; i++)
{
if(labels[i]!= max_k )
continue;
sample = data.ptrfloat>(i);
double dist = normL2Sqr_(sample,_old_center, dims);
if( max_dist dist )
{
max_dist = dist;
farthest_i = i;
}
}
counters[max_k]--;
counters[k]++;
labels[farthest_i] = k;
sample= data.ptrfloat>(farthest_i);
for(j = 0; jdims; j++)
{
old_center[j] -= sample[j];
new_center[j] += sample[j];
}
}
for(k = 0; kK; k++)
{
float*center = centers.ptrfloat>(k);
CV_Assert(counters[k]!= 0 );
floatscale = 1.f/counters[k];
for(j = 0; jdims; j++)
center[j] *= scale;
if(iter > 0 )
{
double dist = 0;
const float* old_center = old_centers.ptrfloat>(k);
for( j = 0; j dims; j++ )
{
double t = center[j] - old_center[j];
dist += t*t;
}
max_center_shift= std::max(max_center_shift, dist);
}
}
}
if(++iter == MAX(criteria.maxCount,2) || max_center_shift criteria.epsilon)
break;
// assignlabels
Matdists(1, N,CV_64F);
double*dist = dists.ptrdouble>(0);
parallel_for_(Range(0, N),
KMeansDistanceComputer(dist,labels, data,centers));
compactness= 0;
for(i = 0; iN; i++)
{
compactness+= dist[i];
}
}
if( compactness best_compactness)
{
best_compactness= compactness;
if(_centers.needed())
centers.copyTo(_centers);
_labels.copyTo(best_labels);
}
}
return best_compactness;
}
3 采用cvKMeans2对灰度图像进行聚类分析
//灰度图像聚类分析
BOOL GrayImageSegmentByKMeans2(const IplImage* pImg, IplImage*pResult, intsortFlag)
{
assert(pImg != NULL&& pImg->nChannels== 1);
//创建样本矩阵,CV_32FC1代表位浮点通道(灰度图像)
CvMat*samples = cvCreateMat((pImg->width)* (pImg->height),1, CV_32FC1);
//创建类别标记矩阵,CV_32SF1代表位整型通道
CvMat*clusters = cvCreateMat((pImg->width)* (pImg->height),1, CV_32SC1);
//创建类别中心矩阵
CvMat*centers = cvCreateMat(nClusters, 1, CV_32FC1);
// 将原始图像转换到样本矩阵
{
intk = 0;
CvScalars;
for(int i = 0; i pImg->width; i++)
{
for(int j=0;j pImg->height; j++)
{
s.val[0] = (float)cvGet2D(pImg, j, i).val[0];
cvSet2D(samples,k++, 0, s);
}
}
}
//开始聚类,迭代次,终止误差.0
cvKMeans2(samples, nClusters,clusters, cvTermCriteria(CV_TERMCRIT_ITER + CV_TERMCRIT_EPS,100, 1.0), 1, 0, 0, centers);
// 无需排序直接输出时
if (sortFlag == 0)
{
intk = 0;
intval = 0;
floatstep = 255 / ((float)nClusters - 1);
CvScalars;
for(int i = 0; i pImg->width; i++)
{
for(int j = 0;j pImg->height; j++)
{
val = (int)clusters->data.i[k++];
s.val[0] = 255- val * step;//这个是将不同类别取不同的像素值,
cvSet2D(pResult,j, i, s); //将每个像素点赋值
}
}
returnTRUE;
}
4 利用OpenCV对彩色图像进行颜色聚类:
BOOL ColorImageSegmentByKMeans2(const IplImage* img, IplImage* pResult, int sortFlag)
{
assert(img != NULL&& pResult != NULL);
assert(img->nChannels== 3 && pResult->nChannels == 1);
int i,j;
CvMat*samples=cvCreateMat((img->width)*(img->height),1,CV_32FC3);//创建样本矩阵,CV_32FC3代表位浮点通道(彩色图像)
CvMat*clusters=cvCreateMat((img->width)*(img->height),1,CV_32SC1);//创建类别标记矩阵,CV_32SF1代表位整型通道
int k=0;
for (i=0;iimg->width;i++)
{
for(j=0;jimg->height;j++)
{
CvScalars;
//获取图像各个像素点的三通道值(RGB)
s.val[0]=(float)cvGet2D(img,j,i).val[0];
s.val[1]=(float)cvGet2D(img,j,i).val[1];
s.val[2]=(float)cvGet2D(img,j,i).val[2];
cvSet2D(samples,k++,0,s);//将像素点三通道的值按顺序排入样本矩阵
}
}
cvKMeans2(samples,nClusters,clusters,cvTermCriteria(CV_TERMCRIT_ITER,100,1.0));//开始聚类,迭代次,终止误差.0
k=0;
int val=0;
float step=255/(nClusters-1);
for (i=0;iimg->width;i++)
{
for(j=0;jimg->height;j++)
{
val=(int)clusters->data.i[k++];
CvScalars;
s.val[0]=255-val*step;//这个是将不同类别取不同的像素值,
cvSet2D(pResult,j,i,s); //将每个像素点赋值
}
}
cvReleaseMat(&samples);
cvReleaseMat(&clusters);
return TRUE;
}

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)



 Oracle 오류 3114에 대한 자세한 설명: 신속하게 해결하는 방법
Mar 08, 2024 pm 02:42 PM
Oracle 오류 3114에 대한 자세한 설명: 신속하게 해결하는 방법
Mar 08, 2024 pm 02:42 PM
Oracle 오류 3114에 대한 자세한 설명: 이를 신속하게 해결하는 방법, 구체적인 코드 예제가 필요합니다. Oracle 데이터베이스를 개발 및 관리하는 동안 다양한 오류가 발생하는 경우가 많으며 그중 오류 3114는 비교적 일반적인 문제입니다. 오류 3114는 일반적으로 네트워크 오류, 데이터베이스 서비스 중지 또는 잘못된 연결 문자열 설정으로 인해 발생할 수 있는 데이터베이스 연결 문제를 나타냅니다. 이 문서에서는 오류 3114의 원인과 이 문제를 신속하게 해결하는 방법을 자세히 설명하고 특정 코드를 첨부합니다.
 Copilot을 사용하여 코드를 생성하는 방법
Mar 23, 2024 am 10:41 AM
Copilot을 사용하여 코드를 생성하는 방법
Mar 23, 2024 am 10:41 AM
프로그래머로서 저는 코딩 경험을 단순화하는 도구에 흥미를 느낍니다. 인공 지능 도구의 도움으로 데모 코드를 생성하고 요구 사항에 따라 필요한 수정 작업을 수행할 수 있습니다. Visual Studio Code에 새로 도입된 Copilot 도구를 사용하면 자연어 채팅 상호 작용을 통해 AI 생성 코드를 만들 수 있습니다. 기능을 설명함으로써 기존 코드의 의미를 더 잘 이해할 수 있습니다. Copilot을 사용하여 코드를 생성하는 방법은 무엇입니까? 시작하려면 먼저 최신 PowerPlatformTools 확장을 가져와야 합니다. 이를 위해서는 확장 페이지로 이동하여 "PowerPlatformTool"을 검색하고 설치 버튼을 클릭해야 합니다.
 웜홀 NTT 구문 분석: 모든 토큰을 위한 개방형 프레임워크
Mar 05, 2024 pm 12:46 PM
웜홀 NTT 구문 분석: 모든 토큰을 위한 개방형 프레임워크
Mar 05, 2024 pm 12:46 PM
Wormhole은 블록체인 상호 운용성의 선두주자로서 소유권, 통제 및 무허가형 혁신을 우선시하는 탄력적이고 미래 지향적인 분산 시스템을 만드는 데 중점을 두고 있습니다. 이 비전의 기초는 단순성, 명확성 및 광범위한 다중 체인 솔루션 제품군으로 상호 운용성 환경을 재정의하기 위한 기술 전문 지식, 윤리적 원칙 및 커뮤니티 조정에 대한 헌신입니다. 영지식 증명, 확장 솔루션 및 풍부한 기능의 토큰 표준이 등장하면서 블록체인은 더욱 강력해지고 상호 운용성은 점점 더 중요해지고 있습니다. 이 혁신적인 애플리케이션 환경에서 새로운 거버넌스 시스템과 실용적인 기능은 네트워크 전반의 자산에 전례 없는 기회를 제공합니다. 프로토콜 빌더는 이제 이 새로운 멀티체인에서 어떻게 기능할지 고민하고 있습니다.
 PHP에서 중간점의 의미와 사용법 분석
Mar 27, 2024 pm 08:57 PM
PHP에서 중간점의 의미와 사용법 분석
Mar 27, 2024 pm 08:57 PM
[PHP 중간점의 의미와 사용법 분석] PHP에서 중간점(.)은 두 개의 문자열이나 객체의 속성이나 메소드를 연결하는 데 사용되는 일반적으로 사용되는 연산자입니다. 이 기사에서는 구체적인 코드 예제를 통해 PHP에서 중간점의 의미와 사용법을 자세히 살펴보겠습니다. 1. 문자열 중간점 연산자 연결 PHP에서 가장 일반적인 사용법은 두 문자열을 연결하는 것입니다. 두 문자열 사이에 .을 배치하면 두 문자열을 이어붙여 새 문자열을 만들 수 있습니다. $string1=&qu
 Linux '.a' 파일 생성 및 실행
Mar 20, 2024 pm 04:46 PM
Linux '.a' 파일 생성 및 실행
Mar 20, 2024 pm 04:46 PM
Linux 운영 체제에서 파일을 작업하려면 개발자가 파일, 코드, 프로그램, 스크립트 및 기타 항목을 효율적으로 생성하고 실행할 수 있도록 하는 다양한 명령과 기술을 사용해야 합니다. Linux 환경에서는 확장자가 ".a"인 파일이 정적 라이브러리로서 매우 중요합니다. 이러한 라이브러리는 소프트웨어 개발에서 중요한 역할을 수행하므로 개발자는 여러 프로그램에서 공통 기능을 효율적으로 관리하고 공유할 수 있습니다. Linux 환경에서 효과적인 소프트웨어 개발을 위해서는 ".a" 파일을 생성하고 실행하는 방법을 이해하는 것이 중요합니다. 이번 글에서는 리눅스 ".a" 파일을 포괄적으로 설치하고 구성하는 방법을 소개한다. 리눅스 ".a" 파일의 정의, 목적, 구조, 생성 및 실행 방법을 살펴보자. L은 무엇입니까?
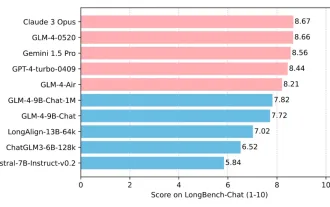 칭화대학교와 Zhipu AI 오픈 소스 GLM-4: 자연어 처리의 새로운 혁명 시작
Jun 12, 2024 pm 08:38 PM
칭화대학교와 Zhipu AI 오픈 소스 GLM-4: 자연어 처리의 새로운 혁명 시작
Jun 12, 2024 pm 08:38 PM
2023년 3월 14일 ChatGLM-6B가 출시된 이후 GLM 시리즈 모델은 광범위한 관심과 인정을 받았습니다. 특히 ChatGLM3-6B가 오픈소스로 공개된 이후 개발자들은 Zhipu AI가 출시하는 4세대 모델에 대한 기대감이 가득합니다. 이러한 기대는 마침내 GLM-4-9B의 출시로 완전히 충족되었습니다. GLM-4-9B의 탄생 소형 모델(10B 이하)에 더욱 강력한 기능을 제공하기 위해 GLM 기술팀은 약 반년 만에 새로운 4세대 GLM 시리즈 오픈 소스 모델인 GLM-4-9B를 출시했습니다. 탐구. 이 모델은 정확성을 보장하면서 모델 크기를 크게 압축하고 추론 속도가 더 빠르고 효율성이 높습니다. GLM 기술팀의 탐색은 아직 이루어지지 않았습니다.
 Apache2는 PHP 파일을 올바르게 구문 분석할 수 없습니다.
Mar 08, 2024 am 11:09 AM
Apache2는 PHP 파일을 올바르게 구문 분석할 수 없습니다.
Mar 08, 2024 am 11:09 AM
공간 제한으로 인해 다음은 간략한 기사입니다. Apache2는 일반적으로 사용되는 웹 서버 소프트웨어이고 PHP는 널리 사용되는 서버측 스크립팅 언어입니다. 웹 사이트를 구축하는 과정에서 Apache2가 PHP 파일을 올바르게 구문 분석할 수 없어 PHP 코드가 실행되지 않는 문제가 발생하는 경우가 있습니다. 이 문제는 일반적으로 Apache2가 PHP 모듈을 올바르게 구성하지 않거나 PHP 모듈이 Apache2 버전과 호환되지 않기 때문에 발생합니다. 이 문제를 해결하는 방법은 일반적으로 두 가지가 있는데, 그 중 하나는
 DreamWeaver CMS의 보조 디렉토리를 열 수 없는 이유 분석
Mar 13, 2024 pm 06:24 PM
DreamWeaver CMS의 보조 디렉토리를 열 수 없는 이유 분석
Mar 13, 2024 pm 06:24 PM
제목: DreamWeaver CMS의 보조 디렉터리를 열 수 없는 이유와 해결 방법 분석 Dreamweaver CMS(DedeCMS)는 다양한 웹 사이트 구축에 널리 사용되는 강력한 오픈 소스 콘텐츠 관리 시스템입니다. 그러나 때로는 웹사이트를 구축하는 과정에서 보조 디렉토리를 열 수 없는 상황이 발생할 수 있으며, 이로 인해 웹사이트의 정상적인 작동에 문제가 발생할 수 있습니다. 이 기사에서는 보조 디렉터리를 열 수 없는 가능한 이유를 분석하고 이 문제를 해결하기 위한 구체적인 코드 예제를 제공합니다. 1. 예상 원인 분석: 의사 정적 규칙 구성 문제: 사용 중
