
최근 네덜란드 델프트공과대학교에서 로봇공학 분야의 유명 학회인 RSS(Robotics: Science and Systems) 2024가 성공적으로 마무리되었습니다.
컨퍼런스 규모는 NeurIPS, CVPR 등 최고의 AI 컨퍼런스와 비교할 수 없지만 RSS는 지난 몇 년간 큰 발전을 이루었으며 올해는 거의 900명이 참가했습니다. 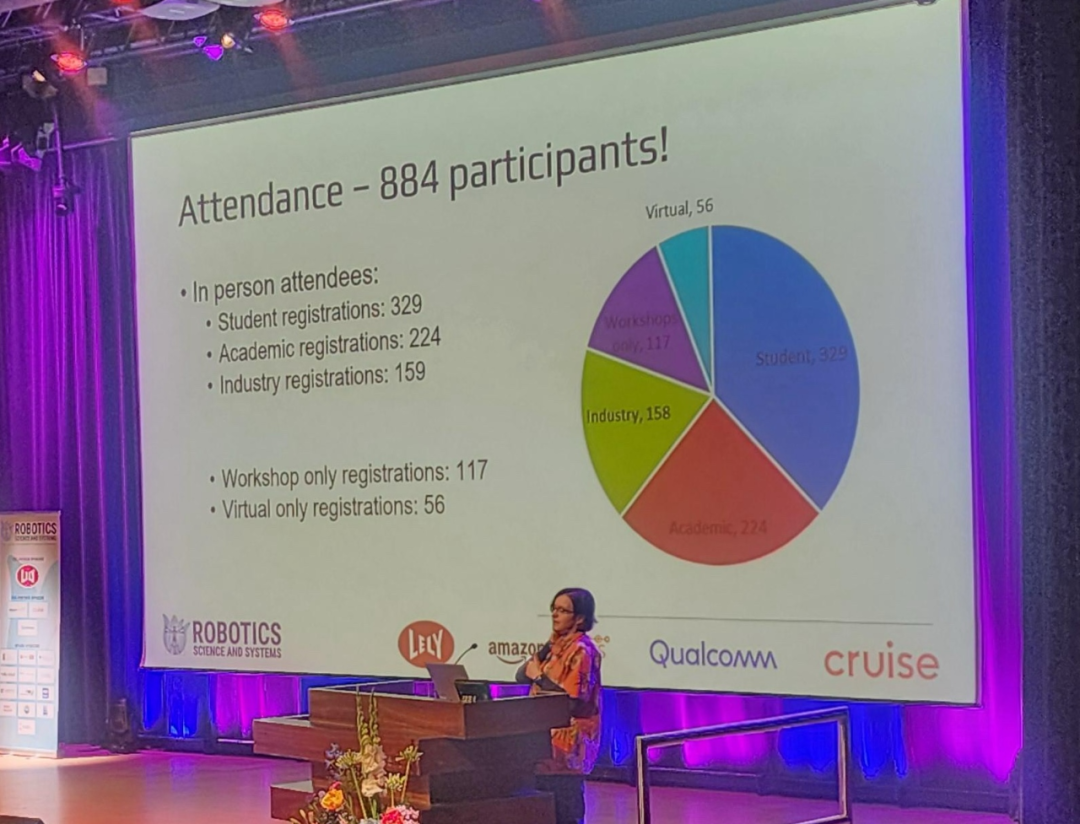
컨퍼런스 마지막 날에는 Best Paper, Best Student Paper, Best System Paper, Best Demo Paper 등 여러 상이 동시에 발표되었습니다. 또한 컨퍼런스에서는 'Early Career Spotlight Award'와 'Time Test Award'도 선정했습니다.
칭화대학교와 베이징 싱동 시대 과학 기술 유한 회사의 휴머노이드 로봇 연구가 최우수 논문상을 수상했으며, 중국 학자 Ji Zhang이 이번 시험상을 수상했다는 점은 주목할 만합니다.
다음은 수상 논문에 대한 정보입니다.
Best Demo Paper Award

논문 제목: CropFollow++ 시연: 키포인트를 사용한 강력한 캐노피 아래 탐색
저자: Arun Narenthiran Siv 아쿠마르 , Mateus Valverde Gasparino, Michael McGuire, Vitor Akihiro Hisano Higuti, M. Ugur Akcal, Girish Chowdhary
기관: UIUC, Earth Sense
논문 링크: https://enriquecoronadozu.github.io/rssproceedings2024/rss20/ p023.pdf
본 논문에서 연구자들은 의미론적 핵심 포인트를 사용하여 농작물 캐노피 농업 로봇을 위한 경험 기반의 강력한 시각적 탐색 시스템을 제안합니다.
작물 캐노피 아래에서 자동 탐색은 작은 작물 행 간격(~0.75미터), 다중 경로 오류로 인한 RTK-GPS 정확도 감소, 과도한 혼란으로 인한 LiDAR 측정 소음으로 인해 어렵습니다. CropFollow라는 초기 작업에서는 학습 기반의 엔드 투 엔드 지각 시각적 탐색 시스템을 제안하여 이러한 문제를 해결했습니다. 그러나 이 접근 방식에는 해석 가능한 표현이 부족하고 신뢰도가 부족하여 폐색 중 이상치 예측에 대한 민감도가 부족하다는 한계가 있습니다.
이 기사의 CropFollow++ 시스템은 모듈식 인식 아키텍처와 학습된 의미론적 핵심 포인트 표현을 소개합니다. CropFollow에 비해 CropFollow++는 더 모듈화되고 해석이 더 쉬우며 폐색 감지에 더 큰 신뢰도를 제공합니다. CropFollow++는 각각 1.9km에 걸쳐 13번 대 33번의 충돌이 필요한 까다로운 후기 시즌 현장 테스트에서 CropFollow보다 훨씬 더 나은 성능을 보였습니다. 또한 다양한 현장 조건에서 여러 개의 작물 아래 캐노피 덮개 자르기 로봇(총 길이 25km)에 CropFollow++를 대규모로 배포하여 배운 주요 교훈에 대해서도 논의합니다.
논문 제목: 상태 추정 없이 픽셀에서 민첩한 비행 시연
저자: smail Geles, Leonard Bauersfeld, Angel Romero, Jiaxu Xing, Davide Scaramuzza
논문 링크: https://enriquecoron 아도즈 .github.io/rssproceedings2024/rss20/p082.pdf
쿼드콥터 드론은 가장 민첩한 비행 로봇 중 하나입니다. 최근 일부 연구에서 학습 기반 제어 및 컴퓨터 비전이 발전했지만 자율 드론은 여전히 명시적인 상태 추정에 의존합니다. 반면에 인간 조종사는 드론에 탑재된 카메라가 제공하는 1인칭 비디오 스트림에만 의존하여 플랫폼을 한계까지 밀어붙이고 보이지 않는 환경에서도 꾸준히 비행할 수 있습니다.
이 기사에서는 픽셀을 제어 명령에 직접 매핑하면서 고속으로 일련의 문을 자율적으로 탐색할 수 있는 최초의 비전 기반 쿼드콥터 드론 시스템을 보여줍니다. 전문 드론 레이서와 마찬가지로 시스템은 명시적인 상태 추정을 사용하지 않고 대신 인간과 동일한 제어 명령(집단 추력 및 신체 속도)을 사용합니다. 연구원들은 최대 40km/h의 속도와 최대 2g의 가속도에서 민첩한 비행을 시연했습니다. 이는 강화 학습(RL)을 통해 비전 기반 정책을 교육함으로써 달성됩니다. 비대칭 Actor-Critic을 사용하면 특권적인 정보를 얻고 훈련을 용이하게 할 수 있습니다. 이미지 기반 RL 훈련 중 계산 복잡성을 극복하기 위해 게이트의 내부 가장자리를 센서 추상화로 사용합니다. 이 간단하면서도 강력한 작업 관련 표현은 훈련 중에 이미지를 렌더링하지 않고도 시뮬레이션할 수 있습니다. 배포 과정에서 연구원들은 Swin Transformer를 기반으로 한 도어 감지기를 사용했습니다.
이 문서의 방법은 표준 기성 하드웨어를 사용하여 자율적이고 민첩한 비행을 달성할 수 있습니다. 이번 시연은 드론 경주에 중점을 두었지만, 이 접근 방식은 경쟁을 넘어서는 의미를 가지며 구조화된 환경에서 실제 응용 프로그램에 대한 향후 연구의 기반이 될 수 있습니다.
최고 시스템 논문상
논문 제목: 범용 조작 인터페이스: 야생 로봇 없이 야생 로봇 교육
Cheng Chi, Zhenjia Xu, Chuer Pan, Eric Cousineau, Benjamin Burchfiel, Siyuan Feng, Russ Tedrake, Shuran Song
기관: 스탠포드 대학교, 컬럼비아 대학교, 도요타 연구소
논문 링크: https://arxiv.org/pdf/2402.10329
이 기사에서는 Universal Manipulation Interface(UMI)를 소개합니다. 인간이 현장에서 입증한 기술을 배포 가능한 로봇 정책으로 직접 전달하는 데이터 수집 및 정책 학습 프레임워크입니다. UMI는 휴대용 그리퍼와 세심한 인터페이스 설계를 활용하여 까다로운 듀얼 암 및 동적 조작 시연을 위한 휴대 가능하고 저렴하며 풍부한 정보의 데이터 수집을 제공합니다. 배포 가능한 정책 학습을 촉진하기 위해 UMI는 추론 시간 지연 일치 및 상대 궤적 작업 표현 기능을 갖춘 신중하게 설계된 정책 인터페이스를 사용합니다. 학습된 정책은 하드웨어 독립적이며 여러 로봇 플랫폼에 배포될 수 있습니다. 이러한 기능을 통해 UMI 프레임워크는 새로운 로봇 조작 기능을 잠금 해제하여 각 작업에 대한 훈련 데이터를 간단히 변경함으로써 동적, 이중 팔, 정확하고 긴 시야 동작의 제로 샷 일반화를 가능하게 합니다. 연구원들은 UMI Zero RF로 학습된 정책이 다양한 인간 시연에 대한 훈련을 받을 때 새로운 환경과 물체에 일반화되는 포괄적인 실제 실험을 통해 UMI의 다양성과 효율성을 입증했습니다.

논문 제목: Khronos: A Unified Approach for Spatio-Temporal Metric-Semantic SLAM in Dynamic Environments
저자: Lukas Schmid, Marcus Abate, Yun Chang, Luca Carlone
논문 링크: https://arxiv.org/pdf/2402.13817
매우 역동적이고 변화하는 환경을 인식하고 이해하는 것은 로봇 자율성의 핵심 역량입니다. 로봇 자세를 정확하게 추정할 수 있는 동적 SLAM 방법을 개발하는 데 상당한 진전이 있었지만, 로봇 환경의 조밀한 시공간 표현을 구축하는 데는 관심이 부족했습니다. 시나리오와 시간에 따른 진화에 대한 자세한 이해는 로봇의 장기적인 자율성을 위해 매우 중요하며, 인간 및 다른 에이전트와 공유되는 환경에서 효과적으로 작동하는 등 장기적인 추론이 필요한 작업에도 중요합니다. 따라서 단기 및 장기 제약이 적용됩니다. 동적 변화의 영향.
이러한 문제를 해결하기 위해 본 연구에서는 시공간적 의미론적 SLAM(SMS) 문제를 정의하고, 문제를 효과적으로 분해하고 해결하기 위한 프레임워크를 제안합니다. 제안된 인수분해는 빠른 프로세스가 활성 시간 창에서 단기 역학을 추적하는 반면, 또 다른 느린 프로세스는 요인 그래프를 사용하여 환경의 장기적인 변화에 대한 반응을 표현하는 시공간 인식 시스템의 자연스러운 구성을 제안하는 것으로 나타났습니다. 추론을 해보세요. 연구자들은 효율적인 시공간 인식 방법인 크로노스(Khronos)를 제공하고, 이것이 단기 및 장기 역학에 대한 기존 설명을 통합하고 조밀한 시공간 지도를 실시간으로 구축할 수 있음을 보여줍니다.
논문에 제공된 시뮬레이션과 실제 결과는 Khronos가 구축한 시공간 지도가 3차원 장면의 시간적 변화를 정확하게 반영할 수 있으며, 여러 지표에서 Khronos가 기준선을 능가한다는 것을 보여줍니다.
우수 학생 논문상
논문 제목: Dynamic On-Palm Manipulation via Controlled Sliding
저자: William Yang, Michael Posa
기관: University of Pennsylvania
논문 링크: https://arxiv.org/pdf/2405.08731
현재 잡기 동작을 수행하지 않는 로봇에 대한 연구는 미끄러짐으로 인해 발생할 수 있는 문제를 피하기 위해 주로 정적 접촉에 초점을 맞추고 있습니다. 그러나 '손 미끄러짐' 문제가 근본적으로 해소된다면, 즉 접촉 시 미끄러짐을 제어할 수 있다면 로봇이 할 수 있는 새로운 행동 영역이 열릴 것이다.
본 논문에서 연구자들은 다양한 혼합 접촉 모드를 종합적으로 고려해야 하는 도전적인 동적 비파지 작업 작업을 제안합니다. 연구원들은 최신 암시적 접촉 모델 예측 제어(MPC) 기술을 사용하여 로봇이 다양한 작업을 완료하기 위한 다중 모드 계획을 수행할 수 있도록 지원했습니다. 이 문서에서는 MPC용 단순화된 모델을 하위 수준 추적 컨트롤러와 통합하는 방법과 암시적 접촉 MPC를 동적 작업의 요구 사항에 맞게 조정하는 방법을 자세히 살펴봅니다.

인상적으로 마찰 및 강체 접촉 모델은 종종 부정확한 것으로 알려져 있지만 이 논문의 접근 방식은 작업을 신속하게 완료하면서 이러한 부정확성에 민감하게 대응할 수 있습니다. 또한 연구원들은 로봇이 작업을 완료하는 데 도움을 주기 위해 참조 궤적이나 모션 프리미티브와 같은 일반적인 보조 도구를 사용하지 않았으며 이는 방법의 다양성을 더욱 강조합니다. 암시적 접촉 MPC 기술이 3차원 공간의 동적 조작 작업에 적용된 것은 이번이 처음입니다.

논문 제목: 민첩하지만 안전함: 충돌 없는 고속 다리 이동 학습
저자: Tairan He, Chong Zhang, Wenli Xiao, Guanqi He, Changliu Liu, Guanya Shi
기관 : CMU, ETH Zurich, Switzerland
논문 링크: https://arxiv.org/pdf/2401.17583
4족 로봇이 복잡한 환경을 이동할 때는 유연성과 안전성이 모두 필요합니다. 사람이나 장애물과의 충돌을 피하면서 신속하게 작업을 완료할 수 있어야 합니다. 그러나 기존 연구는 안전을 위해 1.0m/s 이하의 속도로 보수적인 컨트롤러를 설계하거나 유연성을 추구하지만 치명적인 충돌 문제를 무시하는 한 가지 측면에만 초점을 맞추는 경우가 많습니다.
본 논문에서는 "Agile and Secure"라는 제어 프레임워크를 제안합니다. 이 프레임워크를 통해 4족 로봇은 유연성을 유지하면서 장애물과 사람을 안전하게 피하고 충돌 없는 보행을 달성할 수 있습니다.
ABS에는 두 가지 전략 세트가 포함되어 있습니다. 하나는 로봇에게 장애물 사이를 유연하고 민첩하게 이동하는 방법을 가르치는 것이고, 다른 하나는 로봇이 넘어지지 않거나 문제가 발생하는 경우 신속하게 회복하는 방법을 로봇에게 가르치는 것입니다. 뭔가를 쳤다. 두 가지 전략은 서로를 보완합니다.
ABS 시스템에서 전략 전환은 학습 제어 이론을 기반으로 한 충돌 회피 가치 네트워크에 의해 제어됩니다. 이 네트워크는 전략 전환 시기를 결정할 뿐만 아니라 복구 전략을 위한 객관적인 기능을 제공하여 로봇이 폐쇄 루프 제어 시스템에서 항상 안전하게 유지되도록 보장합니다. 이런 방식으로 로봇은 복잡한 환경의 다양한 상황에 유연하게 대응할 수 있습니다.
이러한 전략과 네트워크를 훈련하기 위해 연구자들은 민첩한 전략, 충돌 회피 가치 네트워크, 복구 전략, 외부 인식 표현 네트워크 등을 포함한 시뮬레이션 환경에 대한 광범위한 교육을 수행했습니다. 이러한 훈련된 모듈은 로봇 자체의 인식 및 컴퓨팅 기능을 통해 로봇이 실내에 있든 제한된 실외 공간에 있든 움직이지 않거나 움직일 수 없는 장애물에 직면하든 관계없이 현실 세계 내에서 빠르고 안전하게 행동할 수 있습니다. ABS 프레임워크.
더 자세한 내용을 알고 싶으시면 본 사이트에서 본 논문에 대한 이전 소개를 참고하실 수 있습니다. 

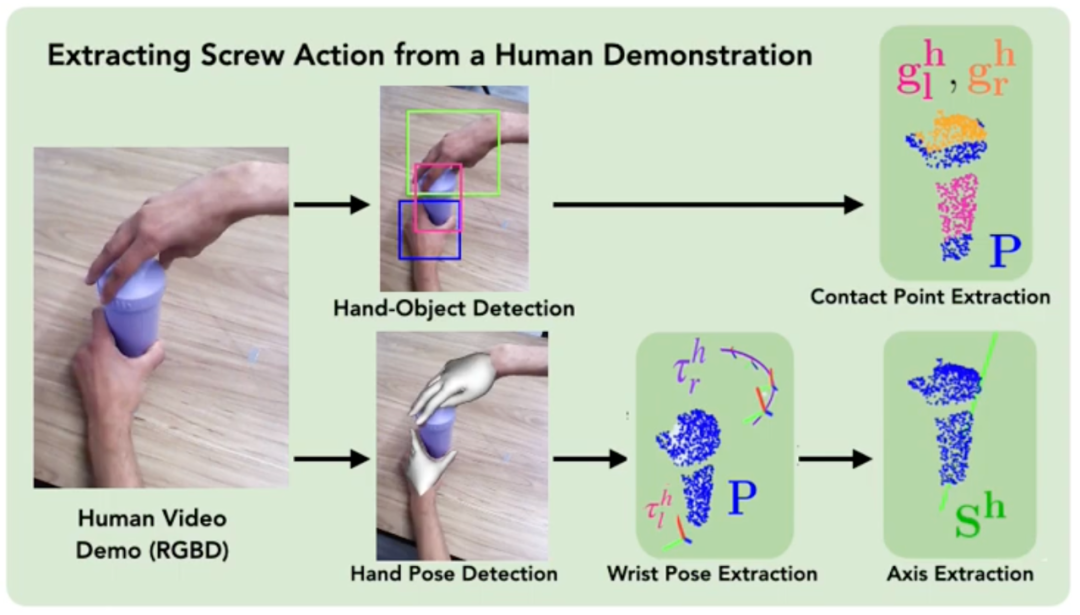
논문 제목: ScrewMimic: 나사 공간 투영을 사용한 인간 비디오의 이중 수동 모방
저자: Arpit Bahety, Priyanka Mandikal, Ben Abbatematteo, Roberto Martín-Martín
기관: 텍사스 University of Austin
논문 링크: https://arxiv.org/pdf/2405.03666
학교에서 상자를 여는 등 두 손으로 동시에 작업하는 방법을 로봇에게 가르치고 싶다면 동시에 실제로는 매우 어려운 난이도입니다. 로봇은 동시에 많은 관절을 제어해야 하기 때문에 두 손의 움직임이 조화를 이루는지도 확인해야 합니다. 인간은 다른 사람을 관찰하면서 새로운 행동을 배우고, 스스로 시도하며 지속적으로 개선해 나갑니다. 본 논문에서 연구자들은 로봇이 영상을 보면서 새로운 기술을 학습하고 실제로 이를 향상시킬 수 있도록 인간의 학습 방법을 언급합니다.
연구원들은 심리학과 생체역학 연구에서 영감을 얻었으며, 두 손의 움직임을 나사처럼 회전할 수 있는 특별한 사슬로 상상했는데, 이를 '나선형 동작'이라고 합니다. 이를 바탕으로 ScrewMimic이라는 시스템을 개발했습니다. 이 시스템은 로봇이 인간의 시연을 더 잘 이해하고 자기 감독을 통해 행동을 개선하는 데 도움을 줄 수 있습니다. 실험을 통해 연구원들은 ScrewMimic 시스템이 로봇이 비디오에서 복잡한 양손 조작 기술을 배우는 데 도움이 될 수 있으며 원래 행동 공간에서 직접 학습하고 개선하는 시스템의 성능을 능가할 수 있음을 발견했습니다. ㅋㅋ 방법 다이어그램 발전하는 휴머노이드 운동: 소음 제거 세계 모델 학습을 통해 어려운 지형 마스터하기
기관: 청화대학교 북경성동시대과기유한공사
Link zum Papier: https://enriquecoronadozu.github.io/rssproceedings2024/rss20/p058.pdf
Mit der aktuellen Technologie können humanoide Roboter nur auf flachem Boden und so einfachem Gelände laufen. Allerdings ist es immer noch schwierig, sie in komplexen Umgebungen, wie beispielsweise echten Außenszenen, frei bewegen zu lassen. In diesem Artikel schlagen Forscher eine neue Methode namens Denoising World Model Learning (DWL) vor.
DWL ist ein durchgängiges Reinforcement-Learning-Framework für die Bewegungssteuerung humanoider Roboter. Dieser Rahmen ermöglicht es dem Roboter, sich an eine Vielzahl unebener und anspruchsvoller Gelände wie Schnee, Hänge und Treppen anzupassen. Erwähnenswert ist, dass diese Roboter nur einen Lernprozess erfordern und ohne zusätzliches Spezialtraining vielfältige Geländeherausforderungen in der realen Welt bewältigen können.

Diese Forschung wurde gemeinsam von Beijing Xingdong Era Technology Co., Ltd. und der Tsinghua-Universität durchgeführt. Xingdong Era wurde 2023 gegründet und ist ein vom Cross-Information Research Institute der Tsinghua University gegründetes Technologieunternehmen, das verkörperte Intelligenz und allgemeine humanoide Robotertechnologien und -produkte entwickelt. Der Gründer ist Chen Jianyu, Assistenzprofessor und Doktorvater am Cross-Information Research Institute der Tsinghua University Das Unternehmen konzentriert sich auf die hochmoderne Anwendung allgemeiner künstlicher Intelligenz (AGI) und widmet sich der Entwicklung universeller humanoider Roboter, die sich an ein breites Spektrum von Bereichen, mehrere Szenarien und hohe Intelligenz anpassen können.
Papiertitel: Echtzeit-Anomalieerkennung und reaktive Planung mit großen Sprachmodellen
Autoren: Rohan Sinha, Amine Elhafsi, Christopher Agia, Matt Foutter, Edward Schmerling, Marco Pavone
Institution :Stanford University
Link zum Papier: https://arxiv.org/pdf/2407.08735
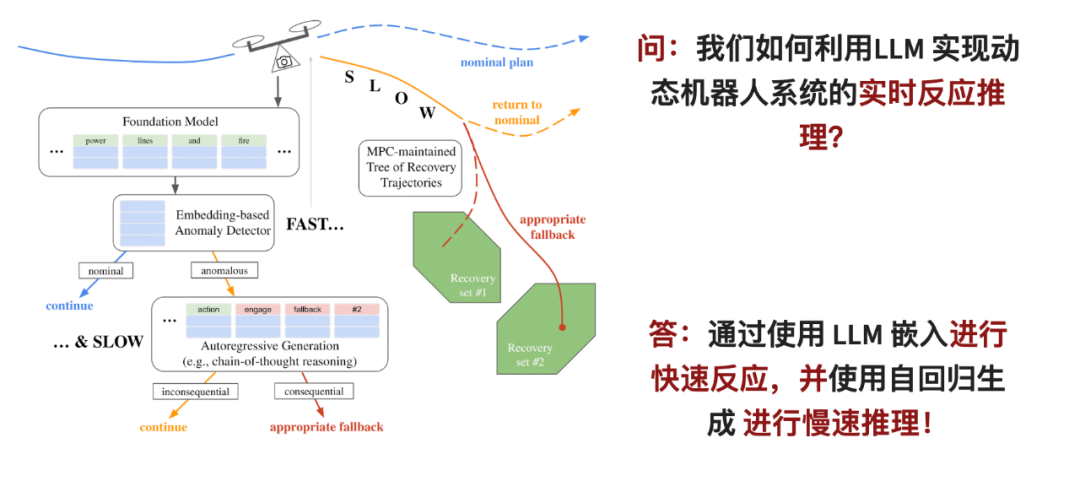
Große Sprachmodelle (LLM) mit Zero-Shot-Generalisierungsfähigkeiten, was sie vielversprechend für Techniken zur Erkennung und Ausgrenzung von Robotern macht Ausfall von Systemen außerhalb der Verteilung. Damit groß angelegte Sprachmodelle wirklich funktionieren, müssen jedoch zwei Probleme gelöst werden: Erstens erfordert LLM eine große Menge an Rechenressourcen, die online angewendet werden müssen, und zweitens muss die Beurteilung von LLM in das Sicherheitssteuerungssystem des Roboters integriert werden.
In diesem Artikel schlugen die Forscher ein zweistufiges Argumentationsgerüst vor: Für die erste Stufe entwarfen sie einen schnellen Anomaliedetektor, der die Beobachtungen des Roboters im Verständnisraum von LLM schnell analysieren kann; Die alternative Auswahlstufe wird betreten. In dieser Phase werden die Inferenzfähigkeiten von LLM genutzt, um eine tiefergehende Analyse durchzuführen.
Die eingegebene Stufe entspricht dem Verzweigungspunkt in der modellprädiktiven Kontrollstrategie, mit der verschiedene alternative Pläne gleichzeitig verfolgt und bewertet werden können, um das Latenzproblem langsamer Denker zu lösen. Sobald das System eine Anomalie oder ein Problem erkennt, wird diese Strategie sofort aktiviert, um sicherzustellen, dass die Aktionen des Roboters sicher sind.
Der schnelle Anomalieklassifikator in diesem Artikel übertrifft die autoregressive Inferenz unter Verwendung modernster GPT-Modelle, selbst wenn relativ kleine Sprachmodelle verwendet werden. Dies ermöglicht es dem in der Arbeit vorgeschlagenen Echtzeitmonitor, die Zuverlässigkeit dynamischer Roboter bei begrenzten Ressourcen und Zeit zu verbessern, beispielsweise in Quadcoptern und selbstfahrenden Autos.

Papiertitel: Configuration Space Distance Fields for Manipulation Planning
Autor: Yiming Li, Eidgenössische Technische Hochschule der Schweiz, Zhejiang-Universität
Link zum Papier: https://arxiv.org/pdf/2406.01137
Signed Distance Field (SDF) ist eine beliebte implizite Formdarstellung in der Robotik, die geometrische Informationen über liefert Objekte und Hindernisse und können problemlos mit Kontroll-, Optimierungs- und Lerntechniken kombiniert werden. SDF wird im Allgemeinen zur Darstellung von Entfernungen im Aufgabenraum verwendet, was dem Konzept der von Menschen wahrgenommenen Entfernung in der 3D-Welt entspricht.
In diesem Artikel schlugen die Forscher das Potenzial der Verwendung von SDF zur Optimierung des Roboterkonfigurationsraums vor, den sie als Konfigurationsraum-Distanzfeld (kurz CDF) bezeichnen. Ähnlich wie die Verwendung von SDF bietet CDF eine effiziente Suche nach Gelenkwinkelabständen und direkten Zugriff auf Ableitungen (Gelenkwinkelgeschwindigkeiten). Normalerweise ist die Roboterplanung in zwei Schritte unterteilt: Zuerst wird geprüft, wie weit die Aktion vom Ziel im Aufgabenraum entfernt ist, und dann wird mithilfe der inversen Kinematik berechnet, wie sich die Gelenke drehen. Aber CDF vereint diese beiden Schritte in einem Schritt und löst das Problem direkt im Gelenkraum des Roboters, was einfacher und effizienter ist. In der Arbeit schlugen die Forscher einen effizienten Algorithmus zur Berechnung und Fusion von CDF vor, der auf jedes Szenario erweitert werden kann.
Sie schlugen außerdem eine entsprechende neuronale CDF-Darstellung unter Verwendung von mehrschichtigen Perzeptronen (MLPs) vor, um eine kompakte und kontinuierliche Darstellung zu erhalten und so die Recheneffizienz zu verbessern. Das Papier enthält einige konkrete Beispiele, um die Wirkung von CDF zu demonstrieren, z. B. das Ausweichen des Roboters vor Hindernissen in einem Flugzeug und das Ausführen einiger Aktionsplanungsaufgaben durch den 7-Achsen-Roboter Franka. Diese Beispiele veranschaulichen die Wirksamkeit von CDF.机 Der Roboterarm der CDF-Methode besteht aus einer Raising-Box-Aufgabe

Die Early Professional Spotlight-Konferenz hat auch den Early Professional Spotlight Award ausgewählt. Es handelt sich um die Navigation von Robotern unbekannte Umgebungen.
Stefan Leutenegger ist Assistenzprofessor (Tenure Track) an der School of Computing, Information and Technology (CIT) der Technischen Universität München (TUM) und arbeitet mit dem Münchner Institut für Robotik und Maschinelle Intelligenz zusammen ( MIRMI) und das Munich Institute for Data Science (MDSI) sind mit dem Munich Center for Machine Learning (MCML) verbunden und waren Mitglied des Dyson Robotics Laboratory. Das von ihm geleitete Smart Robot Laboratory (SRL) widmet sich der Forschung an der Schnittstelle von Wahrnehmung, mobilen Robotern, Drohnen und maschinellem Lernen. Darüber hinaus ist Stefan Gastdozent am Department of Computing des Imperial College London.Er war Mitbegründer von SLAMcore, einem Spin-out-Unternehmen, das auf die Kommerzialisierung von Positionierungs- und Kartierungslösungen für Roboter und Drohnen abzielt. Stefan erhielt seinen Bachelor- und Masterabschluss in Maschinenbau von der ETH Zürich und promovierte 2014 mit einer Arbeit zum Thema „Unmanned Solar Aircraft: Design and Algorithms for Efficient and Robust Autonomous Operation“.
Test of Time Award
 RSS Der Test of Time Award wird an den einflussreichsten Artikel verliehen, der vor mindestens zehn Jahren in RSS (und möglicherweise in seiner Zeitschriftenversion) veröffentlicht wurde. Einfluss kann unter drei Aspekten verstanden werden: zum Beispiel die Änderung der Art und Weise, wie Menschen über Probleme oder das Roboterdesign denken, die Aufmerksamkeit der Community auf neue Probleme zu lenken oder die Schaffung neuer Methoden für das Roboterdesign oder die Problemlösung.
RSS Der Test of Time Award wird an den einflussreichsten Artikel verliehen, der vor mindestens zehn Jahren in RSS (und möglicherweise in seiner Zeitschriftenversion) veröffentlicht wurde. Einfluss kann unter drei Aspekten verstanden werden: zum Beispiel die Änderung der Art und Weise, wie Menschen über Probleme oder das Roboterdesign denken, die Aufmerksamkeit der Community auf neue Probleme zu lenken oder die Schaffung neuer Methoden für das Roboterdesign oder die Problemlösung.
Mit dieser Auszeichnung hofft RSS, die Diskussion über die langfristige Entwicklung dieses Bereichs anzuregen. Der diesjährige Time Test Award geht an Ji Zhang und Sanjiv Singh für ihre Forschung „LOAM: LiDAR Ranging and Real-time Mapping“.
Link zum Papier: https://www.ri.cmu.edu/pub_files/2014/7/Ji_LidarMapping_RSS2014_v8.pdf
Diese zehn Jahre alte Arbeit schlägt eine Methode vor, um die 6-DOF-Bewegung von Doppel-A zu nutzen Echtzeitmethode zur Odometrie und Kartierung axialer Lidar-Odometriedaten. Der Grund dafür, dass dieses Problem schwer zu lösen ist, besteht darin, dass die Entfernungsdaten zu unterschiedlichen Zeiten empfangen werden und Fehler bei der Bewegungsschätzung zu einer Fehlregistrierung der resultierenden Punktwolke führen können. Kohärente 3D-Karten können mit Offline-Batch-Methoden erstellt werden, wobei häufig Schleifenschließungen zum Korrigieren zeitlicher Abweichungen zum Einsatz kommen. Die Methode in diesem Artikel erfordert keine hochpräzise Entfernungsmessung oder Trägheitsmessung und kann eine geringe Drift und einen geringen Rechenaufwand erzielen. Der Schlüssel zum Erreichen dieses Leistungsniveaus besteht darin, das komplexe Problem der gleichzeitigen Positionierung und Zuordnung in zwei Algorithmen aufzuteilen, um eine große Anzahl von Variablen gleichzeitig zu optimieren. Ein Algorithmus führt die Entfernungsmessung mit hoher Frequenz, aber geringer Genauigkeit durch, um die Lidar-Geschwindigkeit zu schätzen; der andere Algorithmus arbeitet mit einer um eine Größenordnung niedrigeren Frequenz für die Feinanpassung und Registrierung von Punktwolken. Die Kombination dieser beiden Algorithmen ermöglicht es der Methode, in Echtzeit zu zeichnen. Die Forscher bewerteten es anhand umfangreicher Experimente und des KITTI-Geschwindigkeitsbenchmarks. Die Ergebnisse zeigten, dass die Methode das SOTA-Genauigkeitsniveau von Offline-Batch-Methoden erreichen kann. Weitere Konferenz- und Preisinformationen finden Sie auf der offiziellen Website: https://roboticsconference.org/위 내용은 최고의 로봇공학 컨퍼런스 RSS 2024에서 중국의 휴머노이드 로봇 연구가 최우수 논문상을 수상했습니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!


















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



