

CVPR 2024 | 자율주행 세계 모델의 4차원 시공간 사전 훈련

북경대학교와 EVLO 혁신팀은 자율주행을 위한 4차원 시공간 사전 훈련 알고리즘인 DriveWorld를 공동으로 제안했습니다. 이 방법은 사전 훈련을 위해 세계 모델을 사용하고, 4차원 시공간 모델링을 위한 메모리 상태 공간 모델을 설계하고, 장면의 점유 그리드를 예측하여 자율주행이 직면하는 무작위 불확실성과 지식 불확실성을 줄입니다. 이 논문은 CVPR 2024에 승인되었습니다.

논문 제목: DriveWorld: 4D Pre-trained Scene Understanding via World Models for Autonomous Driving
논문 링크: https://www.php.cn/link/293643def1ba1161bcdcfbfe434ab76d
1. 동기 부여
자율주행의 장면 이해 작업에는 장면 인식, 미래 변화 예측 등 여러 수준이 포함됩니다. 이러한 수준에는 공간의 3차원 구조뿐만 아니라 시간 차원의 동적 변화도 포함됩니다. 이러한 복잡한 장면 이해를 위해서는 모델이 정확한 결정을 내리기 위해 4차원 공간과 시간의 본질적인 상관관계를 포착하고 이해할 수 있어야 합니다. 4차원 시공간 표현을 학습하는 것은 자연 장면의 확률론적 특성, 환경의 로컬 관찰 가능성 및 다양한 다운스트림 작업의 다양성으로 인해 매우 어렵습니다. 사전 훈련은 대량의 데이터로부터 보편적인 표현을 얻어 보편적인 지식을 갖춘 기본 모델을 구축하는 데 핵심적인 역할을 합니다. 그러나 자율주행에 있어서 4차원 시공간에 대한 사전 훈련 연구는 아직 상대적으로 적은 편이다.
자율 주행 시스템의 설계와 구현은 다양한 불확실성에 직면하고 처리해야 하며, 이는 주로 우연적 불확실성과 인식적 불확실성의 두 가지 범주로 나뉩니다. 우연적 불확실성은 보행자의 갑작스러운 움직임이나 차량의 예상치 못한 행동과 같은 세상에 내재된 무작위성에서 발생합니다. 인식적 불확실성은 폐쇄 또는 센서 제한으로 인한 정보 부족과 같은 환경에 대한 불완전한 지식으로 인해 발생합니다. 이러한 불확실성을 효과적으로 처리하기 위해 자율주행 시스템은 과거 경험을 활용하여 가능한 미래 상태를 예측하고 보이지 않는 영역에 대해 추론할 수 있어야 합니다. 이 작업은 인식, 예측 및 계획 작업에서 자율 주행 시스템의 성능을 향상시키는 것을 목표로 4차원 시공간 사전 훈련된 세계 모델을 통해 이러한 과제를 해결합니다.
2. 방법
자율주행 서라운드 카메라 시스템이 관찰한 T개의 비디오 프레임 o1:T와 그에 상응하는 전문가 행동 a1:T 및 3차원 점유 그리드 라벨 y1:T에 대해, 여기서 3D LiDAR 포인트 클라우드 및 자세 데이터를 사용하여 3차원 점유 래스터 라벨을 얻을 수 있습니다. 우리는 과거의 다중 시점 이미지와 행동으로부터 현재와 미래의 3D 점유 그리드를 예측하는 세계 모델로부터 소형 BEV 표현을 학습하는 것을 목표로 합니다.

2.1 시계열 확률 모델
모델에 4차원 공간과 시간을 모델링할 수 있는 기능을 부여하기 위해 먼저 두 가지 잠재적 변수(h1:T, s1:T)를 도입합니다. 여기서 ht는 시간 단계 t의 모든 과거 정보를 포함한 과거 정보 변수, st는 미래 상태를 예측하는 모델의 핵심인 무작위 상태 변수를 나타냅니다. ht는 과거 정보 h1:t−1과 무작위 상태 s1:t−1을 통해 업데이트됩니다. 미래 상태를 예측하기 위해 RSSM(Recurrent State-Space Model)을 따르고 사후 상태 분포 q(st∣o≤t,a BEV 특징의 차원성이 높다는 점을 고려하여 이를 1차원 벡터 xt로 변환한 다음 (ht,at−1,xt)에서 가우스 분포를 샘플링하여 사후 상태 분포를 생성합니다. 관찰된 이미지가 없는 경우 모델은 과거 정보와 예측된 작업을 기반으로 사전 상태 분포를 도출합니다. 2.1.1 동적 메시징 Dalam pemahaman adegan pemanduan autonomi, mempertimbangkan pergerakan objek adalah penting untuk meramalkan keadaan masa hadapan dengan tepat. Untuk menangkap maklumat dinamik ini, kami mencadangkan untuk memodelkan gerakan objek dengan memperkenalkan parameter gerakan untuk mencapai persepsi gerakan semasa penyebaran maklumat dinamik. Kami memperkenalkan normalisasi lapisan sedar gerakan (MLN). Atribut gerakan termasuk halaju v dan selang masa relatif Δt. (v,Δt) diratakan dan diubah menjadi vektor afin γ dan β melalui dua lapisan linear (ξ1,ξ2): γ=ξ1(v,Δt),β=ξ2(v,Δt). Transformasi afin kemudiannya dilakukan untuk mendapatkan keadaan stokastik yang mendasari persepsi gerakan, dinyatakan sebagai st=γ⋅LN(st)+β. Semasa kenderaan bergerak, keadaan sejarah yang menentukan ht boleh membina perpustakaan memori dinamik h1:t. Dengan melakukan pengiraan mekanisme silang perhatian dengan bank memori dinamik, keadaan sejarah yang menentukan ht boleh diperolehi. 2.1.2 Pemindahan maklumat spatial Dalam pemahaman adegan pemanduan autonomi, selain maklumat perubahan dinamik, maklumat struktur ruang adalah sama penting. Memandangkan bingkai adegan berterusan biasanya mengandungi hanya perubahan kecil, dan kandungan utama adegan itu selalunya terdiri daripada objek statik, seperti jalan raya, pokok dan tanda lalu lintas, apabila memproses maklumat ini, adalah mungkin untuk menukar imej input secara terus kepada vektor satu dimensi Ini akan menyebabkan kehilangan maklumat struktur spatial utama. Kami secara rawak memilih bingkai o 'daripada bingkai 1 hingga T dan menggunakan ciri BEVnya b' untuk membina perwakilan statik terpendam b^=zθ(b') yang menerangkan struktur persepsi spatial. Kami menggabungkan perwakilan statik b^ yang sedar dari segi ruang dengan st perwakilan gerakan yang berubah secara dinamik untuk mendapatkan gambaran menyeluruh bagi pemandangan sekeliling. 2.2 Pra-latihan tugas tambahan Pemahaman menyeluruh tentang persekitaran sekeliling adalah penting untuk pemanduan autonomi. Kami mencadangkan untuk memodelkan dunia fizikal sebagai struktur grid penghunian tiga dimensi untuk menerangkan persekitaran di sekeliling kenderaan. Penyahkod grid penghunian tiga dimensi ditetapkan kepada y^t=lθ(mθ(h~t,st),b^), dengan mθ ialah rangkaian yang memanjangkan ciri satu dimensi ke dimensi BEV, dan lθ digunakan untuk ramalkan rangkaian konvolusi 3D grid penghunian. Pra-latihan grid penghunian empat dimensi ini bukan sahaja dapat menangkap struktur statik tempat kejadian, tetapi juga memahami perubahan dinamik tempat kejadian dari semasa ke semasa, memberikan pemahaman alam sekitar yang lebih kaya dan lebih dinamik untuk sistem pemanduan autonomi. 2.3 Mekanisme gesaan tugas Walaupun perwakilan spatiotemporal empat dimensi boleh dipelajari melalui tugas pra-latihan yang direka oleh model dunia, tugas hiliran yang berbeza memfokuskan pada maklumat yang berbeza. Untuk mengurangkan masalah ini, diilhamkan oleh isyarat semantik untuk pengecaman imej beberapa tangkapan dan isyarat berpandukan contoh visual dalam pembelajaran berbilang tugas, mekanisme "petunjuk tugas" diperkenalkan untuk menyediakan isyarat khusus untuk tugasan yang berbeza untuk membimbing mereka mengekstrak berkaitan tugasan. ciri. Memandangkan terdapat korelasi semantik antara tugasan yang berbeza, kami menggunakan model bahasa besar gφ(⋅) (cth., BERT, CLIP) untuk membina pembayang tugas ini. Sebagai contoh, gesaan tugas untuk tugas pembinaan semula grid penghunian tiga dimensi lebih menumpukan pada adegan semasa dan ditetapkan kepada "tugasnya adalah untuk meramalkan grid penghunian tiga dimensi adegan semasa." Kami memasukkan ptext gesaan ke dalam gφ(⋅) untuk mendapatkan pengekodan segera gφ(ptext). Ia kemudiannya dilanjutkan kepada dimensi BEV, dilambangkan sebagai qφ(gφ(pteks)), dan disepadukan dengan ciri spatiotemporal yang dipelajari. 2.4 Fungsi objektif pra-latihan Objektif pra-latihan DriveWorld termasuk meminimumkan perbezaan antara taburan keadaan posterior dan taburan keadaan sebelumnya (iaitu perbezaan Kullback-Leibler (KL)), dan meminimumkan perbezaan antara masa lalu dan Kerugian yang berkaitan dengan grid penghunian tiga dimensi masa hadapan (iaitu, kehilangan entropi silang (CE)) dan tindakan (iaitu, kehilangan L1). Kami mengguna pakai model untuk memerhati input untuk langkah masa T dan kemudian meramalkan grid pekerjaan tiga dimensi masa depan dan langkah L tindakan. 3. Eksperimen 3.1 Tetapan percubaan Kami telah melatih awal tentang nuScenes dan OpenScenes pada set data pemanduan autonomi, dan diperhalusi pada nuScenes. Kami menggunakan pengagregatan awan titik LiDAR berbilang bingkai untuk mendapatkan label grid penghunian 3D yang padat. 3.2 Keputusan eksperimen Sebahagian daripada keputusan ditunjukkan di sini Untuk mendapatkan keputusan lanjut, sila rujuk kertas. 4. Ringkasan DriveWorld mempertingkatkan pemahaman sistem pemanduan autonomi dan keupayaan ramalan persekitaran sekeliling melalui pra-latihan ruang masa empat dimensi berdasarkan model dunia, dan mengurangkan ketidakpastian yang dihadapi oleh pemanduan autonomi. DriveWorld mencadangkan model ruang keadaan memori untuk pemodelan spatiotemporal, yang termasuk modul storan memori dinamik untuk pembelajaran perwakilan sedar masa dan modul penyebaran adegan statik untuk pembelajaran perwakilan sedar ruang. Untuk meningkatkan lagi kebolehsuaian dan fleksibiliti model, DriveWorld turut memperkenalkan mekanisme gesaan tugas, yang membolehkan model menyesuaikan perwakilannya secara adaptif mengikut keperluan tugas semasa, dengan itu mencapai prestasi terbaik dalam tugas pemanduan autonomi yang berbeza. Rujukan [1]Chen Min, et al. Pra-Latihan Bersepadu Berbilang Kamera Melalui Pembinaan Semula Adegan 3D[J]. Occupancy-mae: Awan titik lidar berskala besar pralatihan sendiri dengan pengekod auto penghunian bertopeng[J]. Transaksi IEEE pada Kenderaan Pintar, 2023. hao China Pengarah Perisikan dan saintis muda Multimedia Cognitive Learning Laboratory (EVOL Lab) Institut Penyelidikan Pintar, penyelidik dan penyelia kedoktoran di Institut Optoelektronik dan Kecerdasan Universiti Politeknik Barat Laut Beliau berkelulusan PhD kepentingan penyelidikan termasuk analisis multimedia, keselamatan tempatan, dan penjelmaan. https://www.php.cn/link/2e36742b377be90ffbf55399215iin Lei Min Cheng
p(st ∣ht− 1,st−1)∽N(μθ(ht,a^t−1),σθ(ht,a^t−1)I),
여기서 st는 대각 공분산을 갖는 정규 분포로 매개변수화됩니다. 초기 분포는 s1∽N(0,I)로 설정됩니다. ( μ , σ )는 매개변수화된 사후 상태 분포를 갖는 다층 퍼셉트론입니다.
p(st∣ht−1,st−1)∽N(μθ(ht,a^t− 1) ,σθ(ht,a^t−1)I),
여기서 (μθ,σθ)는 이전 상태 분포를 매개변수화합니다. ??는 과거 정보 ht−1과 무작위 상태 st−1을 기반으로 행동 a^t−1을 예측하는 데 사용되는 정책 네트워크입니다. 
Keadaan sejarah penentu ialah ht+1=fθ(ht,st). 




위 내용은 CVPR 2024 | 자율주행 세계 모델의 4차원 시공간 사전 훈련의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)



 'Defect Spectrum'은 기존 결함 감지의 경계를 뛰어넘어 초고정밀 및 풍부한 의미론적 산업 결함 감지를 최초로 달성합니다.
Jul 26, 2024 pm 05:38 PM
'Defect Spectrum'은 기존 결함 감지의 경계를 뛰어넘어 초고정밀 및 풍부한 의미론적 산업 결함 감지를 최초로 달성합니다.
Jul 26, 2024 pm 05:38 PM
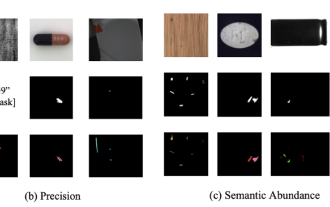
현대 제조업에서 정확한 결함 검출은 제품 품질을 보장하는 열쇠일 뿐만 아니라 생산 효율성을 향상시키는 핵심이기도 합니다. 그러나 기존 결함 감지 데이터세트는 실제 적용에 필요한 정확성과 의미론적 풍부함이 부족한 경우가 많아 모델이 특정 결함 카테고리나 위치를 식별할 수 없게 됩니다. 이 문제를 해결하기 위해 광저우 과학기술대학교와 Simou Technology로 구성된 최고 연구팀은 산업 결함에 대한 상세하고 의미론적으로 풍부한 대규모 주석을 제공하는 "DefectSpectrum" 데이터 세트를 혁신적으로 개발했습니다. 표 1에서 볼 수 있듯이, 다른 산업 데이터 세트와 비교하여 "DefectSpectrum" 데이터 세트는 가장 많은 결함 주석(5438개의 결함 샘플)과 가장 상세한 결함 분류(125개의 결함 카테고리)를 제공합니다.
 수백만 개의 결정 데이터로 훈련하여 결정학적 위상 문제를 해결하는 딥러닝 방법인 PhAI가 Science에 게재되었습니다.
Aug 08, 2024 pm 09:22 PM
수백만 개의 결정 데이터로 훈련하여 결정학적 위상 문제를 해결하는 딥러닝 방법인 PhAI가 Science에 게재되었습니다.
Aug 08, 2024 pm 09:22 PM
Editor |KX 오늘날까지 단순한 금속부터 큰 막 단백질에 이르기까지 결정학을 통해 결정되는 구조적 세부 사항과 정밀도는 다른 어떤 방법과도 비교할 수 없습니다. 그러나 가장 큰 과제인 소위 위상 문제는 실험적으로 결정된 진폭에서 위상 정보를 검색하는 것입니다. 덴마크 코펜하겐 대학의 연구원들은 결정 위상 문제를 해결하기 위해 PhAI라는 딥러닝 방법을 개발했습니다. 수백만 개의 인공 결정 구조와 그에 상응하는 합성 회절 데이터를 사용하여 훈련된 딥러닝 신경망은 정확한 전자 밀도 맵을 생성할 수 있습니다. 연구는 이 딥러닝 기반의 순순한 구조 솔루션 방법이 단 2옹스트롬의 해상도로 위상 문제를 해결할 수 있음을 보여줍니다. 이는 원자 해상도에서 사용할 수 있는 데이터의 10~20%에 해당하는 반면, 기존의 순순한 계산은
 NVIDIA 대화 모델 ChatQA는 버전 2.0으로 발전했으며 컨텍스트 길이는 128K로 언급되었습니다.
Jul 26, 2024 am 08:40 AM
NVIDIA 대화 모델 ChatQA는 버전 2.0으로 발전했으며 컨텍스트 길이는 128K로 언급되었습니다.
Jul 26, 2024 am 08:40 AM
오픈 LLM 커뮤니티는 백개의 꽃이 피어 경쟁하는 시대입니다. Llama-3-70B-Instruct, QWen2-72B-Instruct, Nemotron-4-340B-Instruct, Mixtral-8x22BInstruct-v0.1 등을 보실 수 있습니다. 훌륭한 연기자. 그러나 GPT-4-Turbo로 대표되는 독점 대형 모델과 비교하면 개방형 모델은 여전히 많은 분야에서 상당한 격차를 보이고 있습니다. 일반 모델 외에도 프로그래밍 및 수학을 위한 DeepSeek-Coder-V2, 시각 언어 작업을 위한 InternVL과 같이 핵심 영역을 전문으로 하는 일부 개방형 모델이 개발되었습니다.
 Google AI가 IMO 수학 올림피아드 은메달을 획득하고 수학적 추론 모델 AlphaProof가 출시되었으며 강화 학습이 다시 시작되었습니다.
Jul 26, 2024 pm 02:40 PM
Google AI가 IMO 수학 올림피아드 은메달을 획득하고 수학적 추론 모델 AlphaProof가 출시되었으며 강화 학습이 다시 시작되었습니다.
Jul 26, 2024 pm 02:40 PM
AI의 경우 수학 올림피아드는 더 이상 문제가 되지 않습니다. 목요일에 Google DeepMind의 인공 지능은 AI를 사용하여 올해 국제 수학 올림피아드 IMO의 실제 문제를 해결하는 위업을 달성했으며 금메달 획득에 한 걸음 더 다가섰습니다. 지난 주 막 끝난 IMO 대회에는 대수학, 조합론, 기하학, 수론 등 6개 문제가 출제됐다. 구글이 제안한 하이브리드 AI 시스템은 4문제를 맞혀 28점을 얻어 은메달 수준에 이르렀다. 이달 초 UCLA 종신 교수인 테렌스 타오(Terence Tao)가 상금 100만 달러의 AI 수학 올림피아드(AIMO Progress Award)를 추진했는데, 예상외로 7월 이전에 AI 문제 해결 수준이 이 수준으로 향상됐다. IMO에서 동시에 질문을 해보세요. 가장 정확하게 하기 어려운 것이 IMO인데, 역사도 가장 길고, 규모도 가장 크며, 가장 부정적이기도 합니다.
 PRO | MoE 기반의 대형 모델이 더 주목받는 이유는 무엇인가요?
Aug 07, 2024 pm 07:08 PM
PRO | MoE 기반의 대형 모델이 더 주목받는 이유는 무엇인가요?
Aug 07, 2024 pm 07:08 PM
2023년에는 AI의 거의 모든 분야가 전례 없는 속도로 진화하고 있다. 동시에 AI는 구체화된 지능, 자율주행 등 핵심 트랙의 기술적 한계를 지속적으로 확장하고 있다. 멀티모달 추세 하에서 AI 대형 모델의 주류 아키텍처인 Transformer의 상황이 흔들릴까요? MoE(Mixed of Experts) 아키텍처를 기반으로 한 대형 모델 탐색이 업계에서 새로운 트렌드가 된 이유는 무엇입니까? 대형 비전 모델(LVM)이 일반 비전 분야에서 새로운 돌파구가 될 수 있습니까? ...지난 6개월 동안 공개된 본 사이트의 2023 PRO 회원 뉴스레터에서 위 분야의 기술 동향과 산업 변화에 대한 심층 분석을 제공하여 새로운 환경에서 귀하의 목표 달성에 도움이 되는 10가지 특별 해석을 선택했습니다. 년. 준비하세요. 이 해석은 2023년 50주차에 나온 것입니다.
 대형 모델에 대한 새로운 과학적이고 복잡한 질문 답변 벤치마크 및 평가 시스템을 제공하기 위해 UNSW, Argonne, University of Chicago 및 기타 기관이 공동으로 SciQAG 프레임워크를 출시했습니다.
Jul 25, 2024 am 06:42 AM
대형 모델에 대한 새로운 과학적이고 복잡한 질문 답변 벤치마크 및 평가 시스템을 제공하기 위해 UNSW, Argonne, University of Chicago 및 기타 기관이 공동으로 SciQAG 프레임워크를 출시했습니다.
Jul 25, 2024 am 06:42 AM
편집자 |ScienceAI 질문 응답(QA) 데이터 세트는 자연어 처리(NLP) 연구를 촉진하는 데 중요한 역할을 합니다. 고품질 QA 데이터 세트는 모델을 미세 조정하는 데 사용될 수 있을 뿐만 아니라 LLM(대형 언어 모델)의 기능, 특히 과학적 지식을 이해하고 추론하는 능력을 효과적으로 평가하는 데에도 사용할 수 있습니다. 현재 의학, 화학, 생물학 및 기타 분야를 포괄하는 과학적인 QA 데이터 세트가 많이 있지만 이러한 데이터 세트에는 여전히 몇 가지 단점이 있습니다. 첫째, 데이터 형식이 비교적 단순하고 대부분이 객관식 질문이므로 평가하기 쉽지만 모델의 답변 선택 범위가 제한되고 모델의 과학적 질문 답변 능력을 완전히 테스트할 수 없습니다. 이에 비해 개방형 Q&A는
 정확도는 60.8%에 달합니다. Transformer를 기반으로 한 Zhejiang University의 화학적 역합성 예측 모델은 Nature 저널에 게재되었습니다.
Aug 06, 2024 pm 07:34 PM
정확도는 60.8%에 달합니다. Transformer를 기반으로 한 Zhejiang University의 화학적 역합성 예측 모델은 Nature 저널에 게재되었습니다.
Aug 06, 2024 pm 07:34 PM
Editor | KX 역합성은 약물 발견 및 유기 합성에서 중요한 작업이며, 프로세스 속도를 높이기 위해 AI가 점점 더 많이 사용되고 있습니다. 기존 AI 방식은 성능이 만족스럽지 못하고 다양성이 제한적입니다. 실제로 화학 반응은 종종 반응물과 생성물 사이에 상당한 중복이 발생하는 국지적인 분자 변화를 일으킵니다. 이에 영감을 받아 Zhejiang University의 Hou Tingjun 팀은 단일 단계 역합성 예측을 분자 문자열 편집 작업으로 재정의하고 표적 분자 문자열을 반복적으로 정제하여 전구체 화합물을 생성할 것을 제안했습니다. 그리고 고품질의 다양한 예측이 가능한 편집 기반 역합성 모델 EditRetro를 제안합니다. 광범위한 실험을 통해 이 모델은 표준 벤치마크 데이터 세트 USPTO-50 K에서 60.8%의 상위 1 정확도로 탁월한 성능을 달성하는 것으로 나타났습니다.
 자연의 관점: 의학 분야의 인공지능 테스트는 혼란에 빠졌습니다. 어떻게 해야 할까요?
Aug 22, 2024 pm 04:37 PM
자연의 관점: 의학 분야의 인공지능 테스트는 혼란에 빠졌습니다. 어떻게 해야 할까요?
Aug 22, 2024 pm 04:37 PM
Editor | ScienceAI 제한된 임상 데이터를 기반으로 수백 개의 의료 알고리즘이 승인되었습니다. 과학자들은 누가 도구를 테스트해야 하며 최선의 방법은 무엇인지에 대해 토론하고 있습니다. 데빈 싱(Devin Singh)은 응급실에서 오랜 시간 치료를 기다리던 중 심장마비를 겪는 소아환자를 목격했고, 이를 계기로 대기시간을 단축하기 위해 AI 적용을 모색하게 됐다. SickKids 응급실의 분류 데이터를 사용하여 Singh과 동료들은 잠재적인 진단을 제공하고 테스트를 권장하는 일련의 AI 모델을 구축했습니다. 한 연구에 따르면 이러한 모델은 의사 방문 속도를 22.3% 단축하여 의료 검사가 필요한 환자당 결과 처리 속도를 거의 3시간 단축할 수 있는 것으로 나타났습니다. 그러나 인공지능 알고리즘의 연구 성공은 이를 입증할 뿐이다.
