진정한 인간형 로봇을 만드는 것이 얼마나 어려운가요? 보통 로봇이 움직일 때 모든 관절에서 '찰칵' 소리가 나지만, OpenAI가 본 스타트업 기업 1X는 지난주 새로운 공개 휴머노이드를 선보였습니다. 로봇 NEO는 조용하고 실용적일 수 있습니다. 영상의 볼륨을 높이면 모터가 배낭을 들어올리기 위해 몸을 구부릴 때 모터가 약간 윙윙거리는 소리를 들을 수 있습니다.  이 영상을 보고 정말 묻고 싶은 게 이거 정말 홀스터를 찬 사람이 아닌가? 오늘날의 산업용 로봇은 매우 빠르게 움직일 수 있지만 사물과 접촉하기 전에 극도로 느린 속도로 속도를 줄여야 합니다. 안전을 보장하기 위해 이러한 로봇은 종종 안전 케이지에 보관되어야 하지만 NEO는 영상 속 소녀를 부드럽게 안고 책가방을 자연스럽고 부드럽게 건네줄 수 있습니다. 이것은 어떻게 이루어 집니까? 1X Technologies의 AI 담당 부사장 Eric Zhang이 NEO의 기술을 소개하는 블로그를 작성했습니다.
이 영상을 보고 정말 묻고 싶은 게 이거 정말 홀스터를 찬 사람이 아닌가? 오늘날의 산업용 로봇은 매우 빠르게 움직일 수 있지만 사물과 접촉하기 전에 극도로 느린 속도로 속도를 줄여야 합니다. 안전을 보장하기 위해 이러한 로봇은 종종 안전 케이지에 보관되어야 하지만 NEO는 영상 속 소녀를 부드럽게 안고 책가방을 자연스럽고 부드럽게 건네줄 수 있습니다. 이것은 어떻게 이루어 집니까? 1X Technologies의 AI 담당 부사장 Eric Zhang이 NEO의 기술을 소개하는 블로그를 작성했습니다.
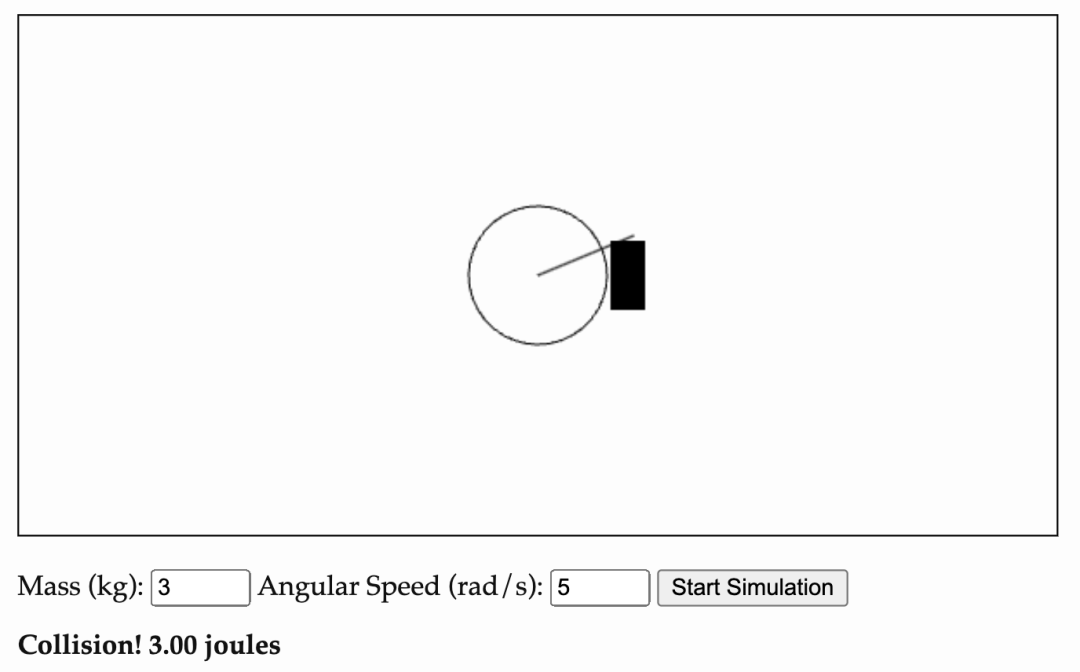
그는 이 블로그를 모터 관성과 기어 시스템에 대한 튜토리얼이라고 불렀습니다. 1X Technologies에 합류하기 전 Eric Zhang은 6년 동안 Google의 로봇 연구 부서에서 근무했지만 1X Technologies에 합류하고 나서야 이러한 개념의 중요성을 깊이 이해했다고 인정했습니다. 장에릭 씨는 물리적 계산을 직접 수행하면서 학습 능력을 갖춘 만능 로봇을 만드는 데는 가볍고 높은 토크의 모터가 핵심이라는 확신을 갖게 되었습니다. 관절 운동에너지 변환효율이 낮아서 소음이 심한가요? 무게 3kg, 반경 0.4m, 초당 5라디안으로 회전하는 바퀴를 상상해 보세요. 바퀴에서 뻗어나온 레버는 고정된 블록과 충돌합니다. 충돌이 완전히 비탄성이라고 가정합니다. 즉, 충돌 후 바퀴가 회전을 멈추고 블록에서 튕겨나가지 않을 것임을 의미합니다. 계산을 단순화하기 위해 레버 암에는 질량이 없고 바퀴의 회전을 방지하는 역할만 한다고 가정합니다. 회전 운동에너지 공식에 따르면 I는 관성 모멘트이고 Ω는 각속도입니다. 레버에는 질량이 없다고 가정하기 때문에 시스템의 관성은 고정 실린더의 관성과 동일합니다: . 값을 대입하면 I = 0.24kg⋅m^2가 됩니다. 따라서 이 시스템의 회전 운동 에너지는 3J로 더 계산될 수 있습니다. 실제 비탄성 충돌에서는 바퀴와 블록의 총 운동량은 보존되지만 총 운동 에너지는 보존되지 않습니다. 따라서 시스템의 회전 운동 에너지는 3줄 미만이 됩니다. 에너지는 보존된 양인데 나머지 운동에너지는 어디로 가나요? 운동에너지의 일부는 운동으로 변환되고, 나머지 운동에너지는 열에너지, 소리, 재질 내부 변형의 형태로 소모된다는 것이 정답이다. 로봇이 움직일 때 큰 소리가 나는 것은 운동에너지 전달이 비효율적이어서 기계적인 일이 소리로 변환되어 에너지가 낭비되기 때문이다. 나무 블록이 레버의 움직임을 방해하기 때문에 새로운 바퀴의 속도는 0으로 떨어지며, 그에 따른 운동 에너지도 0으로 떨어집니다. 이는 바퀴가 회전을 멈추려면 모든 운동 에너지가 다른 형태의 에너지로 변환되어야 함을 의미합니다. 다행스럽게도 3줄은 많은 에너지가 아니며, 강아지가 1m/s의 속도로 달려와 멈추는 것과 같습니다. 위 시스템을 약간 수정합니다. 이제 두 개의 바퀴, 각 바퀴의 질량은 1.5kg이고 반경은 0.4m입니다. 두 바퀴는 각각 5rad/s와 50rad/s(즉, 첫 번째 바퀴 속도의 10배)로 회전하고 고정된 블록과 충돌합니다. 두 번째 바퀴는 첫 번째 바퀴보다 10배 빠르게 회전하며 기어링을 통해 첫 번째 바퀴를 구동합니다. 이 설정은 10:1 기어 감속비와 동일하며, 이는 레버의 최종 속도를 감소시킵니다. 시스템의 운동 에너지는 두 바퀴의 회전 운동 에너지의 합입니다. 이전 예에서와 같이 시스템은 충돌 후 정지하게 되며 모든 운동 에너지는 열, 소음 및 재료 변형의 형태로 소산되어야 합니다. 레버가 이전과 동일한 속도로 블록에 접촉하더라도 전체 운동에너지(150J)는 기존 단일 휠 시스템의 50배입니다! 로봇 기어박스 표준에 따라 기어비를 100으로 늘리면 소산해야 하는 총 운동 에너지는 15,000줄입니다. 이것은 대략 시속 1,000마일의 속도로 공을 치는 것과 같습니다. 이 속도에서는 레버에 닿는 모든 것이 완전히 파괴됩니다. 물론 기어 시스템 자체가 면역이 되는 것은 아닙니다. 기어 연결 장치는 안전을 위해 설계되는 경우가 많기 때문에 이는 다소 직관에 어긋날 수 있습니다. 레버의 최종 속도가 변하지 않고 바퀴의 전체 질량도 변하지 않고 레버의 움직임을 방해하는 나무 블록이 없으며 두 세트의 장치의 움직임을 별도로 기록하고 관찰하면 영상만 봐서는 차이를 알 수 없을 것 같아요. 그러나 충돌, 특히 예상치 못한 충돌의 경우 이야기는 매우 다릅니다.휴머노이드 로봇이 세상과 안전하게 상호 작용하려면 회전 모터의 물리학이 중요합니다. 대부분의 휴머노이드 로봇 회사는 견고한 고속 기어 전송 시스템에 의존하기 때문에 집이 아닌 공장에 로봇을 배치하는 것을 선택합니다. 위에서 언급한 야구의 운동 에너지를 '파괴하는' 것과 마찬가지로 이러한 시스템도 사람 주변에서는 안전하지 않으므로 보호용 케이지로 둘러싸야 합니다. 생각해보세요. 로봇이 커피 한 잔을 빨리 가져오려면 팔다리의 엔드 이펙터가 빠르게 움직여야 합니다. 로봇의 팔다리와 기어 반대편에는 엔드 이펙터 작동 속도보다 훨씬 빠른 속도의 모터가 있어야 합니다. 운동 에너지는 각속도의 제곱에 비례하기 때문에 로봇의 움직임은 실제로 로봇의 림 링크 자체가 아닌 고속 회전 기어의 관성에 의해 제어됩니다. MIT의 Russ Tedrake 교수는 수업 시간에 이러한 반직관적인 로봇 역학 현상에 대해 훌륭하게 설명했습니다. Lien du cours : https://manipulation.csail.mit.edu/robot. html Pourquoi utiliser des boîtes de vitesses si elles consomment de l'énergie et sont dangereuses ?
La raison en est que la boîte de vitesses fournit un levier mécanique essentiel : de nombreux moteurs ne peuvent pas fournir suffisamment de couple lorsqu'ils travaillent seuls, c'est pourquoi les ingénieurs installent des engrenages sur les moteurs à grande vitesse. sacrifié pour le couple nécessaire.
Ce type de système d'engrenages est « rigide » et ne peut pas être « entraîné en marche arrière ». Une fois que les engrenages commencent à tourner, ils s'emboîteront étroitement et il sera difficile de les faire tourner. Revenir. Ainsi, à l’autre extrémité de la boîte de vitesses, davantage de force doit être exercée pour résister à la force de rotation générée par le moteur à grande vitesse.
Sur la base des considérations ci-dessus, 1X Technologies s'est engagée à fabriquer des moteurs à couple élevé et à faible vitesse au cours des dix dernières années afin de maximiser la sécurité du système de transmission. Grâce au moteur et au système d'entraînement utilisés par le robot NEO, avec des rapports de transmission plus petits et un poids plus léger, il est devenu le premier robot véritablement domestique pouvant être intégré en toute sécurité dans l'environnement domestique. Redéfinir l'importance des vidéos réelles pour la formation des robots En plus de collecte à partir de robots Les chercheurs peuvent également utiliser des vidéos en perspective à la première personne de personnes réelles effectuant des tâches pour former des robots. L'idée est la suivante :
1. progrès des robots généraux". Le matériel robotique coûte cher, et l’embauche d’opérateurs humains à distance pour effectuer des tâches utilisant du matériel volumineux est tout aussi coûteuse. De plus, l’efficacité des opérations à distance est très faible, bien inférieure à la vitesse à laquelle les humains peuvent directement accomplir des tâches.
2. Si nous attachons des caméras frontales aux personnes et leur faisons porter de grands gants en caoutchouc qui couvrent leur chair, nous pouvons rapidement collecter un vaste ensemble de données de personnes effectuant diverses tâches et les tâches. Les gens ordinaires accomplissent inconsciemment un grand nombre d’actions et de tâches opérationnelles différentes dans leur vie quotidienne. Bien qu’il soit difficile de percevoir directement le résultat brut du mouvement, nous pouvons déduire des actions en analysant les changements de pose dans les vidéos. Ce type de collecte de données pourrait contribuer à éliminer les obstacles au développement de robots à usage général jusqu'à ce qu'un matériel plus avancé soit disponible.
3. Il existe de nombreuses vidéos à la première et à la troisième personne sur Internet, qui peuvent entraîner les robots à reconnaître et à apprendre diverses activités que les gens effectuent dans les vidéos, ce qui leur permet de se développer davantage. notre taille de données.
Avant d'étendre ce type de collecte de données, il est également important de noter qu'il n'y a pas de pièces qui tournent rapidement dans notre corps par rapport à un moteur tournant à 5 000 tr/min. , l'énergie cinétique des muscles Très faible, la masse effective que nous transportons lorsque nous bougeons est également beaucoup plus petite. Vous constaterez donc que même si les angles des articulations d'un robot peuvent être à peu près les mêmes que ceux d'un humain, la masse effective fournie par ses moteurs rotatifs peut être trop grand pour accomplir la tâche avec dextérité.
Même si nous développons des stratégies de contrôle de mouvement efficaces, les robots ne peuvent toujours pas atteindre la vitesse et la fluidité humaines lorsqu'ils effectuent des actions telles qu'allumer et éteindre facilement les lumières ou courir avec grâce. En effet, les forces exercées par les robots lorsqu’ils touchent des objets sont très différentes de celles exercées par les humains.
Donc, si vous souhaitez transformer rapidement des vidéos humaines en stratégies de mouvements de robots, vous avez besoin des méthodes suivantes :
1. Un robot très conforme et flexible comme NEO
2. Laissez le robot suivre la trajectoire de mouvement de la vidéo à une vitesse inférieure à 1x, au lieu de la copier directement " Dynamique "Matériel Humain". Cependant, cela ne convient qu'aux tâches de fonctionnement statique et ne convient pas aux tâches qui nécessitent un contact avec de nombreux objets, telles que plier des vêtements et préparer des aliments dans la cuisine.
3. Découplez la planification du mouvement et la planification dynamique, permettant à la planification du mouvement de se concentrer sur l'atteinte de la position cible, tandis que la planification dynamique se concentre sur le contrôle de la force lorsqu'une collision se produit. 위 내용은 로봇이 손의 힘을 익히고 안전하게 집안일을 하는 것은 얼마나 어려운 일인가? 1X 인공지능 부사장이 자세한 설명을 작성합니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!



 에 따르면 I는 관성 모멘트이고 Ω는 각속도입니다. 레버에는 질량이 없다고 가정하기 때문에 시스템의 관성은 고정 실린더의 관성과 동일합니다:
에 따르면 I는 관성 모멘트이고 Ω는 각속도입니다. 레버에는 질량이 없다고 가정하기 때문에 시스템의 관성은 고정 실린더의 관성과 동일합니다:  . 값을 대입하면 I = 0.24kg⋅m^2가 됩니다. 따라서 이 시스템의 회전 운동 에너지는 3J로 더 계산될 수 있습니다.
. 값을 대입하면 I = 0.24kg⋅m^2가 됩니다. 따라서 이 시스템의 회전 운동 에너지는 3J로 더 계산될 수 있습니다. 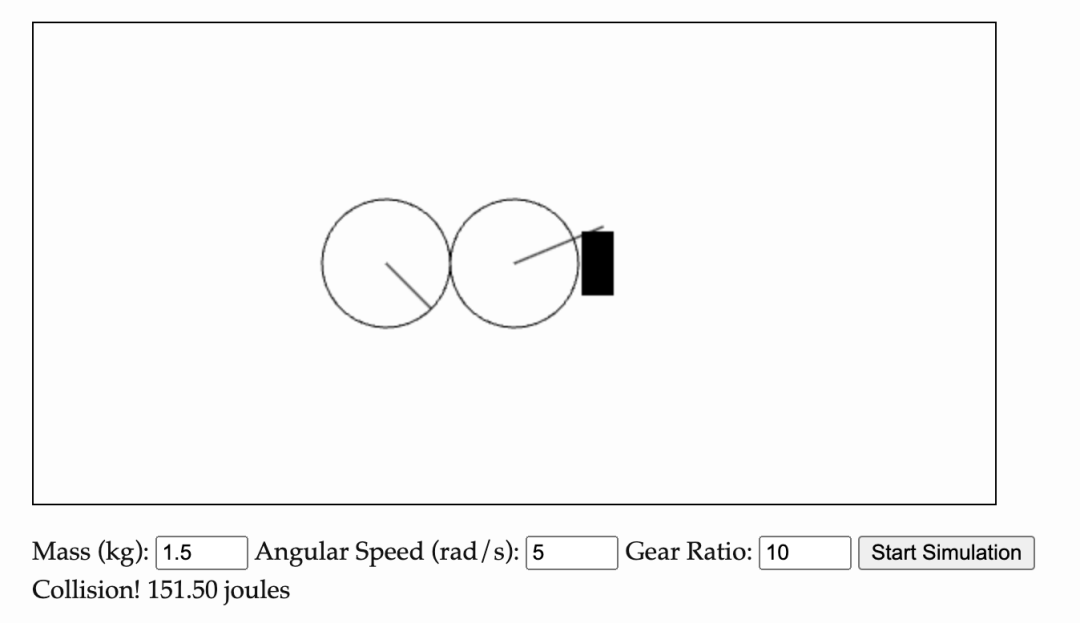


















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



