

길 찾기: 미로 속의 쥐를 위한 역추적 알고리즘

소개
복잡한 미로 속에서 치즈를 찾는 쥐를 상상해 보세요. 모든 길은 막다른 골목에 도달하기 전까지는 유망해 보입니다. 가능한 솔루션을 놓치지 않고 모든 경로를 체계적으로 탐색할 수 있는 방법은 무엇입니까? 복잡한 퍼즐과 실제 문제를 해결하기 위한 강력한 도구인 역추적 알고리즘이 등장하는 곳입니다.
역추적은 점진적으로 솔루션을 구축하고 유효한 솔루션으로 이어지지 않는 경로를 포기하는 재귀적 알고리즘 기술입니다. 그 중요성은 AI, 로봇 공학, 최적화와 같은 분야에 적용할 수 있는 단순성과 다양성에 있습니다.
이 블로그에서는 역추적이 어떻게 작동하는지 알아보고, 실제 적용 사례를 살펴보고, 미로 속의 쥐 문제를 해결하는 데 중점을 둘 것입니다.
알고리즘 이해
백트래킹은 솔루션을 점진적으로 구축하여 문제를 해결하는 데 사용되는 깊이 우선 검색(DFS) 기술입니다. 경로가 유효하지 않은 상태로 이어지는 경우 알고리즘은 이전 단계로 "역추적"하여 다른 옵션을 시도합니다.
미로 속의 쥐의 발걸음
- 시작
- 한 방향(예: 오른쪽 또는 아래쪽)으로 움직여 보세요.
- 이동이 유효한 경우(벽이나 경계 밖이 아님) 셀을 다음으로 표시합니다. 경로의 일부를 삭제하고 경로를 0으로 만듭니다.
- 다음 동작을 재귀적으로 탐색하세요.
- 막다른 골목에 도달하면 되돌아가서(셀 표시 해제) 새로운 시도를 해보세요. 방향.
- 목적지에 도달하거나 모든 가능성을 소진할 때까지 반복하세요.

실제 애플리케이션 개요
도메인: 로봇공학
역추적은 로봇 공학, 특히 길 찾기 및 탐색 알고리즘에서 중요한 역할을 합니다. 자율 로봇은 이 기술을 사용하여 알려지지 않은 환경을 탐색하여 잠재적인 경로가 간과되지 않도록 합니다.

역추적을 통해 문제를 해결하는 방법
도전과제: 미로 탐색
로봇과 수색 및 구조 작업은 종종 미로와 같은 환경에 직면합니다. 지형에 대한 사전 지식 없이 최적의 경로를 찾는 것이 과제입니다.
솔루션
역추적 알고리즘을 사용하면 시스템이 가능한 각 경로를 체계적으로 탐색하여 솔루션이 있는 경우 이를 찾을 수 있습니다. 역추적 및 대체 경로 탐색을 통해 막다른 골목을 처리하므로 동적 시나리오에서 안정성이 매우 높습니다.
구현의 과제
계산 복잡성:
역추적은 크거나 복잡한 미로에서 불필요한 경로를 많이 탐색하여 비효율성을 초래할 수 있습니다.
실시간 제약:
로봇 공학과 같은 실제 응용 분야에서는 속도가 매우 중요합니다. 경험적 방법으로 역추적을 최적화하면(예: 특정 경로 우선순위 지정) 성능이 향상될 수 있습니다.
**사례 연구: **자율 드론 내비게이션
한 선도적인 로봇공학 회사는 재난 피해 지역에서 드론 길찾기를 위한 역추적을 구현했습니다. 드론은 이 알고리즘을 사용하여 붕괴된 구조물을 탐색하고 장애물을 피하면서 체계적으로 경로를 탐색했습니다. 결과는? 갇힌 개인을 더 빠르게 식별하고 효율적인 자원 할당.

시각적 자료 및 다이어그램:
미로 다이어그램: 쥐의 움직임과 역행을 시각적으로 표현한 것
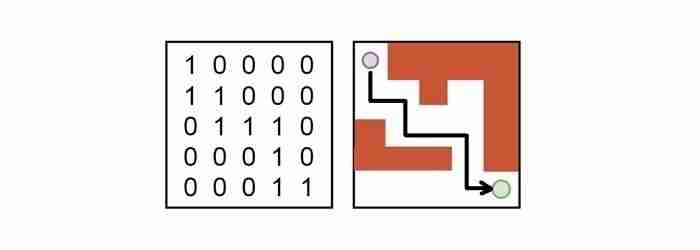
트리 다이어그램: 의사결정 트리로 표현되는 재귀 호출
풀다(0, 0)
└── 풀기(1, 0)
└── 풀다(1, 1)
└── 풀다(2, 1)
└── 풀다(2, 2)
└── 풀다(2, 3)
└── 풀다(3, 3)
└── 풀다(4, 3)
└── 풀기(4, 4)(목적지)
장점과 영향
체계적인 탐색: 모든 가능성을 고려합니다.
단순성: 다양한 문제에 대해 구현하기 쉽습니다.
적응성: 일정 관리, 퍼즐 풀기, 최적화 문제에 적용 가능
결론 및 개인적 통찰

역추적 알고리즘은 문제 해결의 초석이며 다양성과 신뢰성을 모두 제공합니다. 쥐가 치즈를 찾도록 돕는 것부터 미로를 통해 로봇을 안내하는 것까지, 그 응용 분야는 방대하고 영향력이 큽니다.
컴퓨팅 요구가 증가함에 따라 역추적을 최적화하면 AI 시스템의 실시간 탐색 및 복잡한 의사결정과 같은 새로운 기회가 열릴 것입니다. 그 단순함과 강력함은 체계적인 문제 해결의 아름다움을 상기시켜 줍니다.
위 내용은 길 찾기: 미로 속의 쥐를 위한 역추적 알고리즘의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)



 파이썬 : 게임, Guis 등
Apr 13, 2025 am 12:14 AM
파이썬 : 게임, Guis 등
Apr 13, 2025 am 12:14 AM
Python은 게임 및 GUI 개발에서 탁월합니다. 1) 게임 개발은 Pygame을 사용하여 드로잉, 오디오 및 기타 기능을 제공하며 2D 게임을 만드는 데 적합합니다. 2) GUI 개발은 Tkinter 또는 PYQT를 선택할 수 있습니다. Tkinter는 간단하고 사용하기 쉽고 PYQT는 풍부한 기능을 가지고 있으며 전문 개발에 적합합니다.
 Python vs. C : 학습 곡선 및 사용 편의성
Apr 19, 2025 am 12:20 AM
Python vs. C : 학습 곡선 및 사용 편의성
Apr 19, 2025 am 12:20 AM
Python은 배우고 사용하기 쉽고 C는 더 강력하지만 복잡합니다. 1. Python Syntax는 간결하며 초보자에게 적합합니다. 동적 타이핑 및 자동 메모리 관리를 사용하면 사용하기 쉽지만 런타임 오류가 발생할 수 있습니다. 2.C는 고성능 응용 프로그램에 적합한 저수준 제어 및 고급 기능을 제공하지만 학습 임계 값이 높고 수동 메모리 및 유형 안전 관리가 필요합니다.
 파이썬과 시간 : 공부 시간을 최대한 활용
Apr 14, 2025 am 12:02 AM
파이썬과 시간 : 공부 시간을 최대한 활용
Apr 14, 2025 am 12:02 AM
제한된 시간에 Python 학습 효율을 극대화하려면 Python의 DateTime, Time 및 Schedule 모듈을 사용할 수 있습니다. 1. DateTime 모듈은 학습 시간을 기록하고 계획하는 데 사용됩니다. 2. 시간 모듈은 학습과 휴식 시간을 설정하는 데 도움이됩니다. 3. 일정 모듈은 주간 학습 작업을 자동으로 배열합니다.
 Python vs. C : 성능과 효율성 탐색
Apr 18, 2025 am 12:20 AM
Python vs. C : 성능과 효율성 탐색
Apr 18, 2025 am 12:20 AM
Python은 개발 효율에서 C보다 낫지 만 C는 실행 성능이 높습니다. 1. Python의 간결한 구문 및 풍부한 라이브러리는 개발 효율성을 향상시킵니다. 2.C의 컴파일 유형 특성 및 하드웨어 제어는 실행 성능을 향상시킵니다. 선택할 때는 프로젝트 요구에 따라 개발 속도 및 실행 효율성을 평가해야합니다.
 Python Standard Library의 일부는 무엇입니까? 목록 또는 배열은 무엇입니까?
Apr 27, 2025 am 12:03 AM
Python Standard Library의 일부는 무엇입니까? 목록 또는 배열은 무엇입니까?
Apr 27, 2025 am 12:03 AM
Pythonlistsarepartoftsandardlardlibrary, whileraysarenot.listsarebuilt-in, 다재다능하고, 수집 할 수있는 반면, arraysarreprovidedByTearRaymoduledlesscommonlyusedDuetolimitedFunctionality.
 Python 학습 : 2 시간의 일일 연구가 충분합니까?
Apr 18, 2025 am 12:22 AM
Python 학습 : 2 시간의 일일 연구가 충분합니까?
Apr 18, 2025 am 12:22 AM
하루에 2 시간 동안 파이썬을 배우는 것으로 충분합니까? 목표와 학습 방법에 따라 다릅니다. 1) 명확한 학습 계획을 개발, 2) 적절한 학습 자원 및 방법을 선택하고 3) 실습 연습 및 검토 및 통합 연습 및 검토 및 통합,이 기간 동안 Python의 기본 지식과 고급 기능을 점차적으로 마스터 할 수 있습니다.
 파이썬 : 자동화, 스크립팅 및 작업 관리
Apr 16, 2025 am 12:14 AM
파이썬 : 자동화, 스크립팅 및 작업 관리
Apr 16, 2025 am 12:14 AM
파이썬은 자동화, 스크립팅 및 작업 관리가 탁월합니다. 1) 자동화 : 파일 백업은 OS 및 Shutil과 같은 표준 라이브러리를 통해 실현됩니다. 2) 스크립트 쓰기 : PSUTIL 라이브러리를 사용하여 시스템 리소스를 모니터링합니다. 3) 작업 관리 : 일정 라이브러리를 사용하여 작업을 예약하십시오. Python의 사용 편의성과 풍부한 라이브러리 지원으로 인해 이러한 영역에서 선호하는 도구가됩니다.
 Python vs. C : 주요 차이점 이해
Apr 21, 2025 am 12:18 AM
Python vs. C : 주요 차이점 이해
Apr 21, 2025 am 12:18 AM
Python과 C는 각각 고유 한 장점이 있으며 선택은 프로젝트 요구 사항을 기반으로해야합니다. 1) Python은 간결한 구문 및 동적 타이핑으로 인해 빠른 개발 및 데이터 처리에 적합합니다. 2) C는 정적 타이핑 및 수동 메모리 관리로 인해 고성능 및 시스템 프로그래밍에 적합합니다.
