

PyTorch의 RandomPerspective

커피 한잔 사주세요😄
*메모:
- 내 게시물에서는 RandomRotation()에 대해 설명합니다.
- 내 게시물에서는 RandomAffine()에 대해 설명합니다.
- 내 게시물에서는 RandomHorizontalFlip()에 대해 설명합니다.
- 내 게시물에서는 RandomVerticalFlip()에 대해 설명합니다.
- 내 게시물에는 OxfordIIITPet()에 대한 설명이 나와 있습니다.
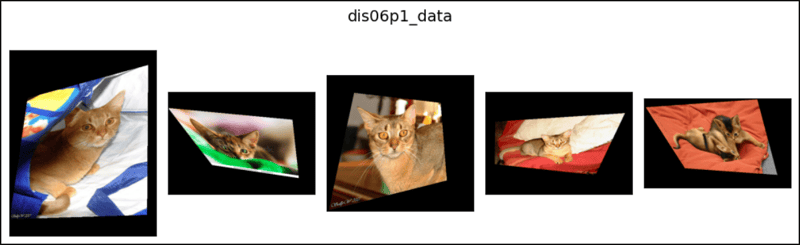
RandomPerspective()는 아래와 같이 0개 이상의 이미지에 대해 원근 변환을 수행할 수 있습니다.
*메모:
- 초기화를 위한 첫 번째 인수는istortion_scale(Optional-Default:0.5-Type:int or float)입니다.
*메모:
- 관점 전환이 가능합니다.
- 0
- 초기화를 위한 두 번째 인수는 p(Optional-Default:0.5-Type:int or float)입니다.
*메모:
- 각 이미지가 원근 변환으로 완성되었는지 아닌지에 대한 확률입니다.
- 0
- 초기화를 위한 세 번째 인수는 보간(Optional-Default:InterpolationMode.BILINEAR-Type:InterpolationMode)입니다.
- 초기화를 위한 네 번째 인수는 fill(Optional-Default:0-Type:int, float 또는 tuple/list(int 또는 float))입니다.
*메모:
- 이미지의 배경을 변경할 수 있습니다. *이미지의 원근 변환 시 배경이 보일 수 있습니다.
- 튜플/리스트는 3개 요소를 포함하는 1D여야 합니다.
- 첫 번째 인수(필수 유형:PIL 이미지 또는 텐서(int))가 있습니다. *3D 텐서여야 합니다.
- v2는 V1 또는 V2에 따라 사용하는 것이 좋습니다? 어느 것을 사용해야 합니까?.
from torchvision.datasets import OxfordIIITPet
from torchvision.transforms.v2 import RandomPerspective
from torchvision.transforms.functional import InterpolationMode
randompers = RandomPerspective()
randompers = RandomPerspective(distortion_scale=0.5,
p=0.5,
interpolation=InterpolationMode.BILINEAR,
fill=0)
randompers
# RandomPerspective(p=0.5,
# distortion_scale=0.5,
# interpolation=InterpolationMode.BILINEAR,
# fill=0)
randompers.distortion_scale
# 0.5
randompers.p
# 0.5
randompers.interpolation
# <InterpolationMode.BILINEAR: 'bilinear'>
randompers.fill
# 0
origin_data = OxfordIIITPet(
root="data",
transform=None
# transform=RandomPerspective(distortion_scale=0)
# transform=RandomPerspective(p=0)
)
dis02p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(distortion_scale=0.2, p=1)
)
dis06p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(distortion_scale=0.6, p=1)
)
dis1p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(distortion_scale=1, p=1)
)
p1_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=1)
)
p05_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=0.5)
)
p1fillgray_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=1, fill=150)
)
p1fillpurple_data = OxfordIIITPet(
root="data",
transform=RandomPerspective(p=1, fill=[160, 32, 240])
)
import matplotlib.pyplot as plt
def show_images1(data, main_title=None):
plt.figure(figsize=(10, 5))
plt.suptitle(t=main_title, y=0.8, fontsize=14)
for i, (im, _) in zip(range(1, 6), data):
plt.subplot(1, 5, i)
plt.imshow(X=im)
plt.xticks(ticks=[])
plt.yticks(ticks=[])
plt.tight_layout()
plt.show()
show_images1(data=origin_data, main_title="origin_data")
show_images1(data=dis02p1_data, main_title="dis02p1_data")
show_images1(data=dis06p1_data, main_title="dis06p1_data")
show_images1(data=dis1p1_data, main_title="dis1p1_data")
show_images1(data=p1_data, main_title="p1_data")
show_images1(data=p05_data, main_title="p05_data")
show_images1(data=p1fillgray_data, main_title="p1fillgray_data")
show_images1(data=p1fillpurple_data, main_title="p1fillpurple_data")
# ↓ ↓ ↓ ↓ ↓ ↓ The code below is identical to the code above. ↓ ↓ ↓ ↓ ↓ ↓
def show_images2(data, main_title=None, d=0.5, prob=0.5, f=0):
plt.figure(figsize=(10, 5))
plt.suptitle(t=main_title, y=0.8, fontsize=14)
for i, (im, _) in zip(range(1, 6), data):
plt.subplot(1, 5, i)
rp = RandomPerspective(distortion_scale=d, p=prob, fill=f) # Here
plt.imshow(X=rp(im)) # Here
plt.xticks(ticks=[])
plt.yticks(ticks=[])
plt.tight_layout()
plt.show()
show_images2(data=origin_data, main_title="origin_data", d=0)
show_images2(data=origin_data, main_title="dis02p1_data", d=0.2, prob=1)
show_images2(data=origin_data, main_title="dis06p1_data", d=0.6, prob=1)
show_images2(data=origin_data, main_title="dis1p1_data", d=1, prob=1)
show_images2(data=origin_data, main_title="p1_data", prob=1)
show_images2(data=origin_data, main_title="p05_data", prob=0.5)
show_images2(data=origin_data, main_title="p1fillgray_data", prob=1, f=150)
show_images2(data=origin_data, main_title="p1fillpurple_data", prob=1,
f=[160, 32, 240])







위 내용은 PyTorch의 RandomPerspective의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7543
7543
 15
1381
52
83
11
55
19
21
87
15
1381
52
83
11
55
19
21
87

 Linux 터미널에서 Python 버전을 볼 때 발생하는 권한 문제를 해결하는 방법은 무엇입니까?
Apr 01, 2025 pm 05:09 PM
Linux 터미널에서 Python 버전을 볼 때 발생하는 권한 문제를 해결하는 방법은 무엇입니까?
Apr 01, 2025 pm 05:09 PM
Linux 터미널에서 Python 버전을 보려고 할 때 Linux 터미널에서 Python 버전을 볼 때 권한 문제에 대한 솔루션 ... Python을 입력하십시오 ...
 10 시간 이내에 프로젝트 및 문제 중심 방법에서 컴퓨터 초보자 프로그래밍 기본 사항을 가르치는 방법?
Apr 02, 2025 am 07:18 AM
10 시간 이내에 프로젝트 및 문제 중심 방법에서 컴퓨터 초보자 프로그래밍 기본 사항을 가르치는 방법?
Apr 02, 2025 am 07:18 AM
10 시간 이내에 컴퓨터 초보자 프로그래밍 기본 사항을 가르치는 방법은 무엇입니까? 컴퓨터 초보자에게 프로그래밍 지식을 가르치는 데 10 시간 밖에 걸리지 않는다면 무엇을 가르치기로 선택 하시겠습니까?
 한 데이터 프레임의 전체 열을 Python의 다른 구조를 가진 다른 데이터 프레임에 효율적으로 복사하는 방법은 무엇입니까?
Apr 01, 2025 pm 11:15 PM
한 데이터 프레임의 전체 열을 Python의 다른 구조를 가진 다른 데이터 프레임에 효율적으로 복사하는 방법은 무엇입니까?
Apr 01, 2025 pm 11:15 PM
Python의 Pandas 라이브러리를 사용할 때는 구조가 다른 두 데이터 프레임 사이에서 전체 열을 복사하는 방법이 일반적인 문제입니다. 두 개의 dats가 있다고 가정 해
 중간 독서를 위해 Fiddler를 사용할 때 브라우저에서 감지되는 것을 피하는 방법은 무엇입니까?
Apr 02, 2025 am 07:15 AM
중간 독서를 위해 Fiddler를 사용할 때 브라우저에서 감지되는 것을 피하는 방법은 무엇입니까?
Apr 02, 2025 am 07:15 AM
Fiddlerevery Where를 사용할 때 Man-in-the-Middle Reading에 Fiddlereverywhere를 사용할 때 감지되는 방법 ...
 정규 표현이란 무엇입니까?
Mar 20, 2025 pm 06:25 PM
정규 표현이란 무엇입니까?
Mar 20, 2025 pm 06:25 PM
정규 표현식은 프로그래밍의 패턴 일치 및 텍스트 조작을위한 강력한 도구이며 다양한 응용 프로그램에서 텍스트 처리의 효율성을 높입니다.
 Uvicorn은 Serving_forever ()없이 HTTP 요청을 어떻게 지속적으로 듣습니까?
Apr 01, 2025 pm 10:51 PM
Uvicorn은 Serving_forever ()없이 HTTP 요청을 어떻게 지속적으로 듣습니까?
Apr 01, 2025 pm 10:51 PM
Uvicorn은 HTTP 요청을 어떻게 지속적으로 듣습니까? Uvicorn은 ASGI를 기반으로 한 가벼운 웹 서버입니다. 핵심 기능 중 하나는 HTTP 요청을 듣고 진행하는 것입니다 ...
 인기있는 파이썬 라이브러리와 그 용도는 무엇입니까?
Mar 21, 2025 pm 06:46 PM
인기있는 파이썬 라이브러리와 그 용도는 무엇입니까?
Mar 21, 2025 pm 06:46 PM
이 기사는 Numpy, Pandas, Matplotlib, Scikit-Learn, Tensorflow, Django, Flask 및 요청과 같은 인기있는 Python 라이브러리에 대해 설명하고 과학 컴퓨팅, 데이터 분석, 시각화, 기계 학습, 웹 개발 및 H에서의 사용에 대해 자세히 설명합니다.
 문자열을 통해 객체를 동적으로 생성하고 방법을 파이썬으로 호출하는 방법은 무엇입니까?
Apr 01, 2025 pm 11:18 PM
문자열을 통해 객체를 동적으로 생성하고 방법을 파이썬으로 호출하는 방법은 무엇입니까?
Apr 01, 2025 pm 11:18 PM
파이썬에서 문자열을 통해 객체를 동적으로 생성하고 메소드를 호출하는 방법은 무엇입니까? 특히 구성 또는 실행 해야하는 경우 일반적인 프로그래밍 요구 사항입니다.
