

Python은 교정을 위해 OpenCV를 사용합니다.

이 글은 주로 Python에서 교정을 위한 OpenCV의 사용을 소개합니다. 이제 이를 공유합니다. 필요한 친구들이 참고할 수 있습니다.
이 글은 공식 OpenCV 샘플을 결합하여 , 정상적으로 작동할 수 있도록 하고, 자체적으로 수집된 데이터에 대한 실험과 설명을 수행합니다.
1. 준비
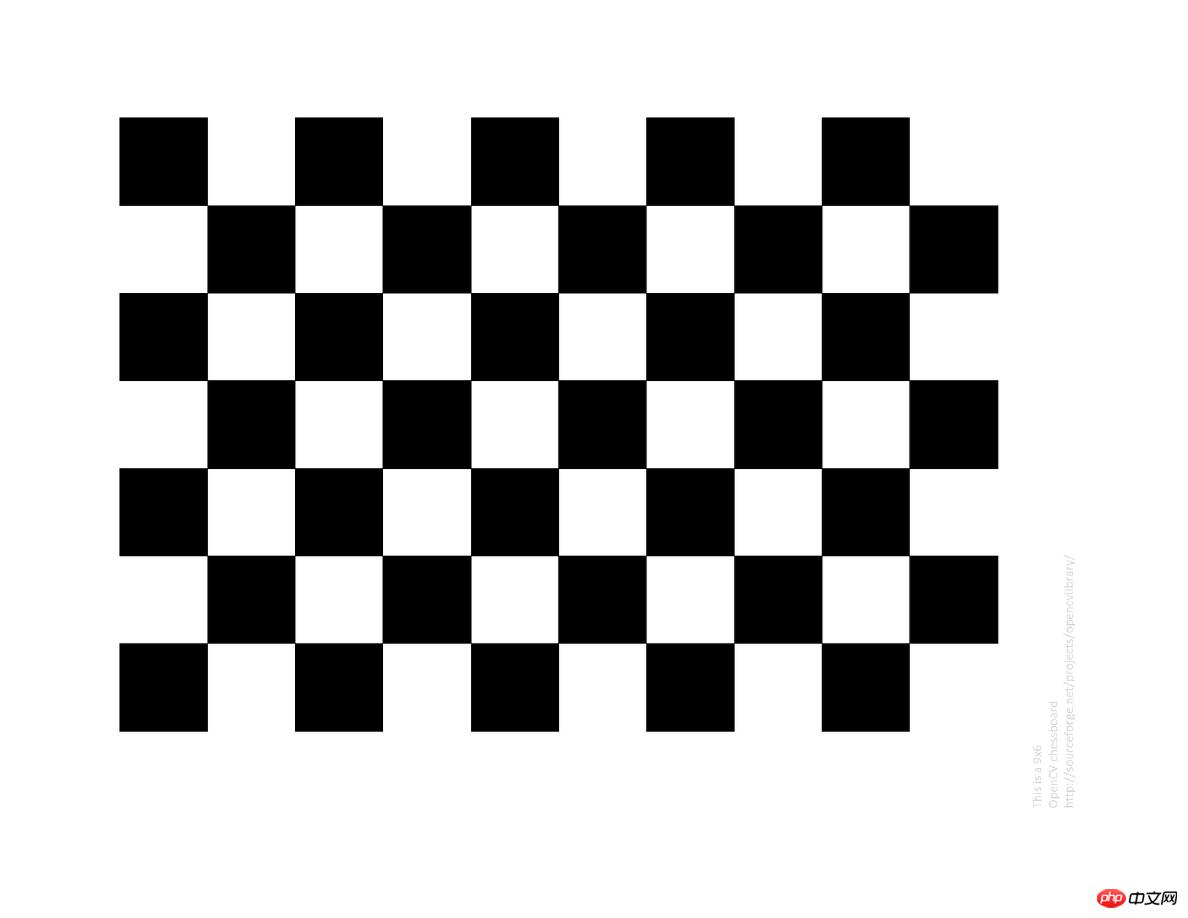
OpenCV는 아래 그림과 같이 체커보드를 사용하여 교정을 수행합니다. 카메라를 보정하려면 일련의 3D 포인트와 해당 2D 이미지 포인트를 입력해야 합니다. 흑백 바둑판에서는 모서리 감지를 통해 2차원 이미지 포인트를 쉽게 찾을 수 있습니다. 현실 세계의 3차원 점은 어떻습니까? 수집하는 동안 우리는 카메라를 한 곳에 배치하고 체커보드 보정판을 다른 위치로 옮긴 다음 사진을 찍었습니다. 따라서 (X,Y,Z)의 값을 알아야 합니다. 하지만 간단히 말하면, 체커보드가 위치한 평면을 XY 평면, 즉 Z=0으로 정의합니다. 교정 보드의 경우 체커보드의 정사각형 크기(예: 30mm)를 알 수 있으므로 체커보드의 모서리 점 좌표를 (0,0,0), (30,0,0), (60, 0,0),..., 이 결과의 단위는 mm입니다.
3D 포인트를 객체 포인트라고 하고, 2D 이미지 포인트를 이미지 포인트라고 합니다.
2. 체커보드 모서리 점 감지
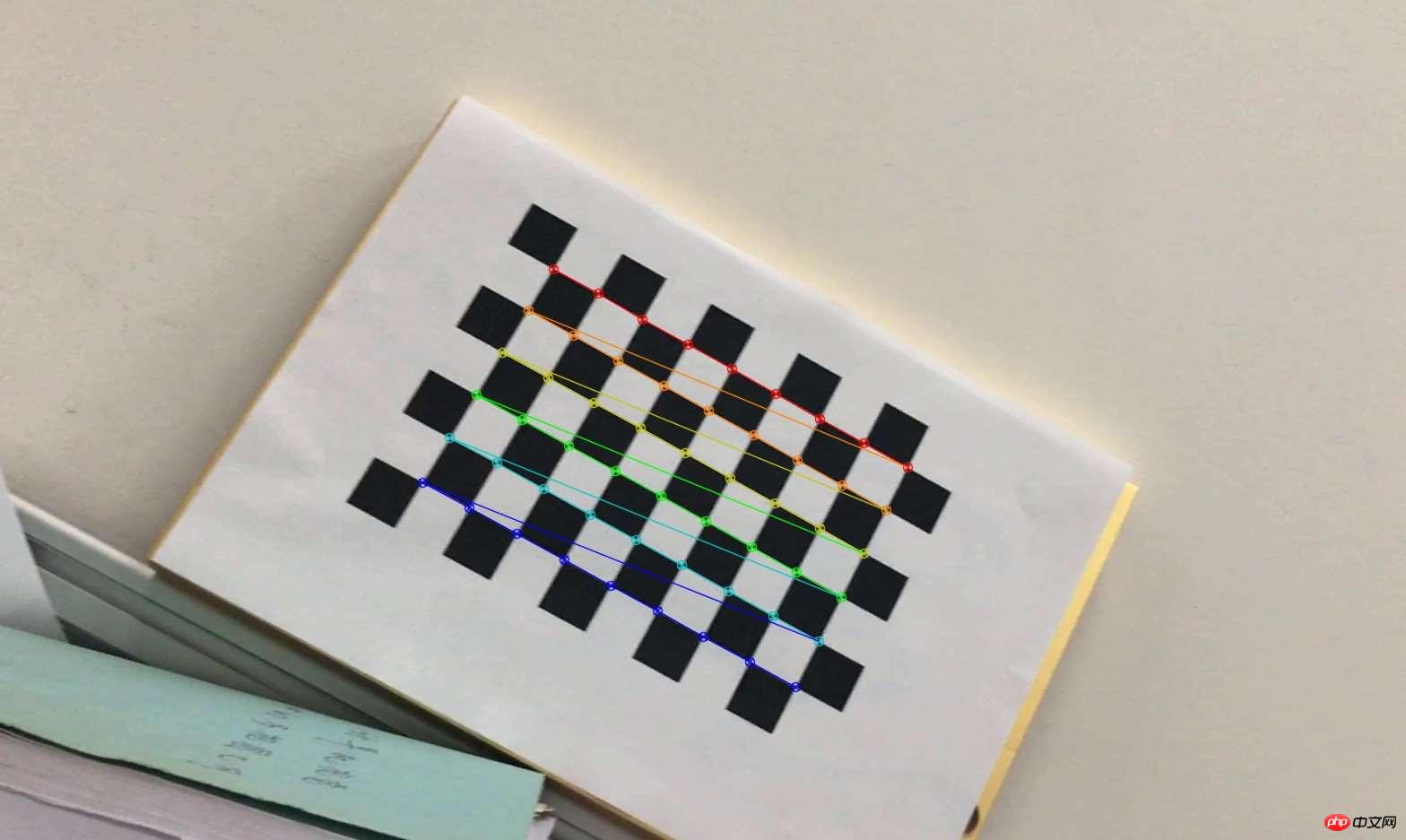
체커보드 템플릿을 찾기 위해 openCV에서 cv2.findChessboardCorners() 함수를 사용합니다. 또한 x와 y 방향에서 숫자가 다른 체커보드 템플릿을 사용하는 것이 좋습니다. 다음 실험에서는 10*7 체커보드를 사용합니다. 각 정사각형의 측면 길이는 20mm입니다. 즉, 내부 모서리가 9*6개 있다는 의미입니다. 이 함수가 템플릿을 감지하면 해당 꼭지점을 반환하고 true를 반환합니다. 물론 모든 이미지가 필요한 템플릿을 찾을 수 있는 것은 아니므로 보정을 위해 여러 이미지를 사용할 수 있습니다. 체커보드를 사용하는 것 외에도 도트 매트릭스를 사용할 수도 있으며 해당 함수는 cv2.findCirclesGrid()입니다.
모서리 점을 찾은 후 cv2.cornerSubPix()를 사용하여 보다 정확한 모서리 픽셀 좌표를 얻을 수 있습니다. 또한 cv2.drawChessboardCorners()를 사용하여 표시할 이미지에 모서리를 그릴 수도 있습니다. 아래 그림과 같이:
3. Calibration
위 단계를 통해 교정에 사용되는 3차원 점과 이미지에서 해당 2차원 점 쌍을 얻었습니다. 교정을 위해 cv2.calibrateCamera()를 사용합니다. 이 함수는 교정 결과, 카메라의 고유 매개변수 행렬, 왜곡 계수, 회전 행렬 및 이동 벡터를 반환합니다.
4. 왜곡 제거
세 번째 단계에서는 이미지 왜곡을 제거하기 전에 cv.getOptimalNewCameraMatrix()를 사용하여 내부 매개변수를 최적화할 수도 있습니다. 및 왜곡 계수를 설정하여 자유 스케일 계수 알파를 정의합니다. 알파가 0으로 설정되면 왜곡 제거 후 원치 않는 픽셀을 제거하는 잘린 내부 매개변수와 왜곡 계수가 반환됩니다. 알파가 1로 설정되면 추가 검은색 픽셀이 포함된 잘린 내부 매개변수와 왜곡 계수가 반환됩니다. 자르기에 대한 ROI.
그런 다음 새로 얻은 내부 매개변수 행렬과 왜곡 계수를 사용하여 이미지를 왜곡할 수 있습니다. 왜곡 제거에는 두 가지 방법이 있습니다.
(1) cv2.undistort()를 사용하세요.
위의 ROI를 직접 호출하면 왜곡이 제거된 이미지를 얻을 수 있습니다. 왜곡되지 않은 이미지를 얻으려면 잘립니다. 코드는 다음과 같습니다.
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
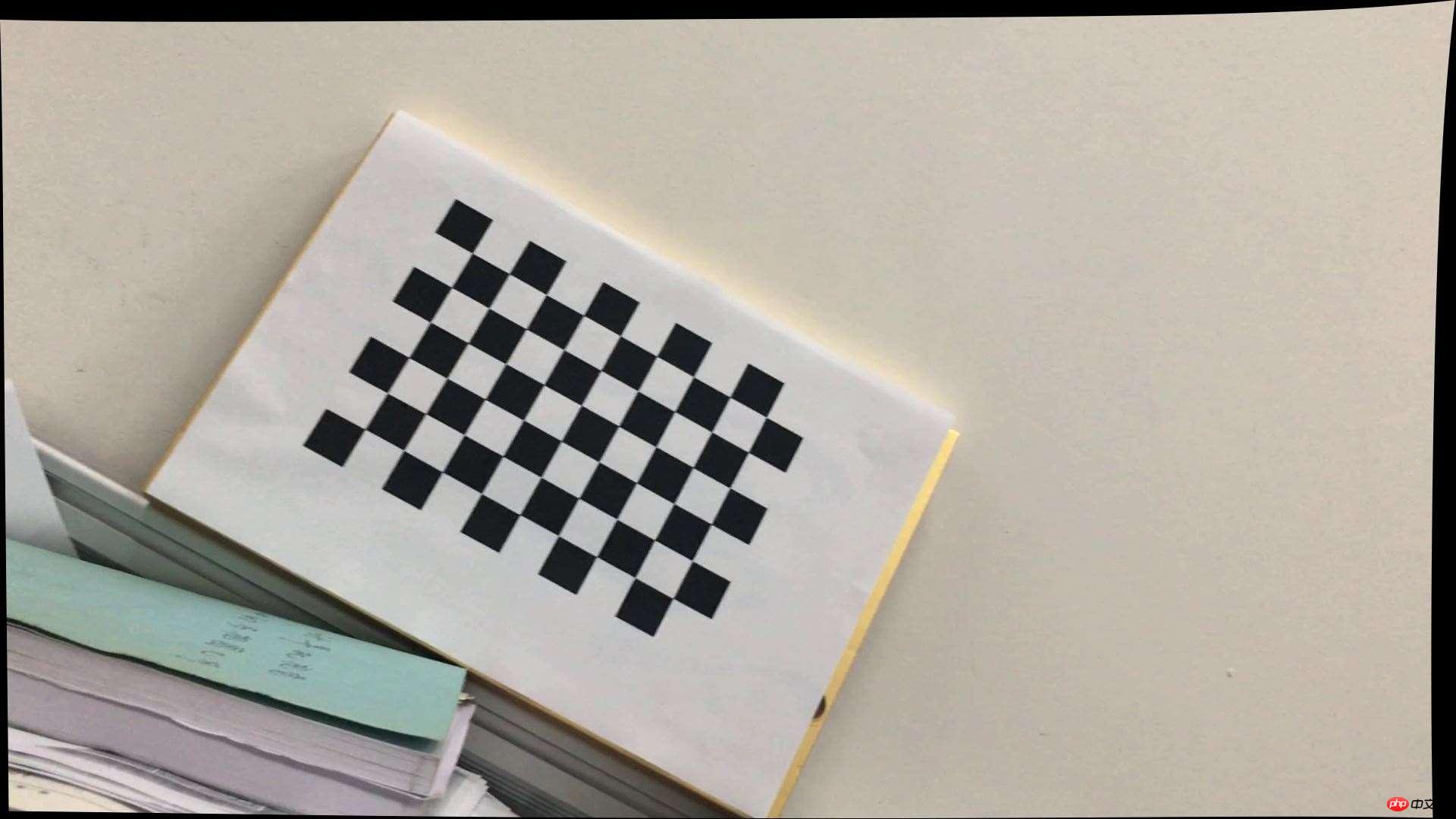
아래 그림은 이미지의 왜곡을 제거하고 검은색 픽셀을 유지한 결과를 보여줍니다.
(2) remmaping 사용
2단계 방법입니다. , 먼저 왜곡된 이미지에서 왜곡되지 않은 이미지로의 매핑을 계산한 다음 이 매핑 관계를 사용하여 이미지를 왜곡합니다.
코드는 다음과 같습니다.
# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
5. 역투영 오류
역투영 오류를 통해 결과의 품질을 평가할 수 있습니다. 0에 가까울수록 더 이상적인 결과입니다. 앞서 계산한 내부 매개변수 행렬, 왜곡계수, 회전행렬, 이동벡터를 통해 cv2.projectPoints()를 이용하여 3차원 점을 2차원 이미지에 투영한 후, 얻은 점 사이의 오차를 계산한다. 역투영과 영상에서 검출된 점, 마지막으로 모든 보정 영상에 대한 평균 오차를 계산하는데, 이 값이 역투영 오차이다.
Code
모든 단계의 코드는 다음과 같습니다.
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
관련 권장 사항:
OpenCVcv::Mat의 데이터는 txt 파일에 기록됩니다
OpenCV cv.Mat 및 .txt 파일 데이터 읽기 및 쓰기 작업
위 내용은 Python은 교정을 위해 OpenCV를 사용합니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7455
7455
 15
1375
52
77
11
40
19
14
9
15
1375
52
77
11
40
19
14
9

 PS가 계속 로딩을 보여주는 이유는 무엇입니까?
Apr 06, 2025 pm 06:39 PM
PS가 계속 로딩을 보여주는 이유는 무엇입니까?
Apr 06, 2025 pm 06:39 PM
PS "로드"문제는 자원 액세스 또는 처리 문제로 인한 것입니다. 하드 디스크 판독 속도는 느리거나 나쁘다 : CrystalDiskinfo를 사용하여 하드 디스크 건강을 확인하고 문제가있는 하드 디스크를 교체하십시오. 불충분 한 메모리 : 고해상도 이미지 및 복잡한 레이어 처리에 대한 PS의 요구를 충족시키기 위해 메모리 업그레이드 메모리. 그래픽 카드 드라이버는 구식 또는 손상됩니다. 운전자를 업데이트하여 PS와 그래픽 카드 간의 통신을 최적화하십시오. 파일 경로는 너무 길거나 파일 이름에는 특수 문자가 있습니다. 짧은 경로를 사용하고 특수 문자를 피하십시오. PS 자체 문제 : PS 설치 프로그램을 다시 설치하거나 수리하십시오.
 PS가 시작될 때 로딩 문제를 해결하는 방법은 무엇입니까?
Apr 06, 2025 pm 06:36 PM
PS가 시작될 때 로딩 문제를 해결하는 방법은 무엇입니까?
Apr 06, 2025 pm 06:36 PM
부팅 할 때 "로드"에 PS가 붙어있는 여러 가지 이유로 인해 발생할 수 있습니다. 손상되거나 충돌하는 플러그인을 비활성화합니다. 손상된 구성 파일을 삭제하거나 바꾸십시오. 불충분 한 메모리를 피하기 위해 불필요한 프로그램을 닫거나 메모리를 업그레이드하십시오. 하드 드라이브 독서 속도를 높이기 위해 솔리드 스테이트 드라이브로 업그레이드하십시오. 손상된 시스템 파일 또는 설치 패키지 문제를 복구하기 위해 PS를 다시 설치합니다. 시작 오류 로그 분석의 시작 과정에서 오류 정보를 봅니다.
 PS가 파일을 열 때로드 문제를 해결하는 방법은 무엇입니까?
Apr 06, 2025 pm 06:33 PM
PS가 파일을 열 때로드 문제를 해결하는 방법은 무엇입니까?
Apr 06, 2025 pm 06:33 PM
"로드"는 PS에서 파일을 열 때 말더듬이 발생합니다. 그 이유에는 너무 크거나 손상된 파일, 메모리 불충분, 하드 디스크 속도가 느리게, 그래픽 카드 드라이버 문제, PS 버전 또는 플러그인 충돌이 포함될 수 있습니다. 솔루션은 다음과 같습니다. 파일 크기 및 무결성 확인, 메모리 증가, 하드 디스크 업그레이드, 그래픽 카드 드라이버 업데이트, 의심스러운 플러그인 제거 또는 비활성화 및 PS를 다시 설치하십시오. 이 문제는 PS 성능 설정을 점차적으로 확인하고 잘 활용하고 우수한 파일 관리 습관을 개발함으로써 효과적으로 해결할 수 있습니다.
 설치 후 MySQL을 사용하는 방법
Apr 08, 2025 am 11:48 AM
설치 후 MySQL을 사용하는 방법
Apr 08, 2025 am 11:48 AM
이 기사는 MySQL 데이터베이스의 작동을 소개합니다. 먼저 MySQLworkBench 또는 명령 줄 클라이언트와 같은 MySQL 클라이언트를 설치해야합니다. 1. MySQL-Uroot-P 명령을 사용하여 서버에 연결하고 루트 계정 암호로 로그인하십시오. 2. CreateABase를 사용하여 데이터베이스를 작성하고 데이터베이스를 선택하십시오. 3. CreateTable을 사용하여 테이블을 만들고 필드 및 데이터 유형을 정의하십시오. 4. InsertInto를 사용하여 데이터를 삽입하고 데이터를 쿼리하고 업데이트를 통해 데이터를 업데이트하고 DELETE를 통해 데이터를 삭제하십시오. 이러한 단계를 마스터하고 일반적인 문제를 처리하는 법을 배우고 데이터베이스 성능을 최적화하면 MySQL을 효율적으로 사용할 수 있습니다.
 PS 페더 링은 어떻게 전환의 부드러움을 제어합니까?
Apr 06, 2025 pm 07:33 PM
PS 페더 링은 어떻게 전환의 부드러움을 제어합니까?
Apr 06, 2025 pm 07:33 PM
깃털 통제의 열쇠는 점진적인 성격을 이해하는 것입니다. PS 자체는 그라디언트 곡선을 직접 제어하는 옵션을 제공하지 않지만 여러 깃털, 일치하는 마스크 및 미세 선택으로 반경 및 구배 소프트를 유연하게 조정하여 자연스럽게 전이 효과를 달성 할 수 있습니다.
 PS 카드가 로딩 인터페이스에 있으면 어떻게해야합니까?
Apr 06, 2025 pm 06:54 PM
PS 카드가 로딩 인터페이스에 있으면 어떻게해야합니까?
Apr 06, 2025 pm 06:54 PM
PS 카드의로드 인터페이스는 소프트웨어 자체 (파일 손상 또는 플러그인 충돌), 시스템 환경 (DIFE 드라이버 또는 시스템 파일 손상) 또는 하드웨어 (하드 디스크 손상 또는 메모리 스틱 고장)로 인해 발생할 수 있습니다. 먼저 컴퓨터 자원이 충분한 지 확인하고 배경 프로그램을 닫고 메모리 및 CPU 리소스를 릴리스하십시오. PS 설치를 수정하거나 플러그인의 호환성 문제를 확인하십시오. PS 버전을 업데이트하거나 폴백합니다. 그래픽 카드 드라이버를 확인하고 업데이트하고 시스템 파일 확인을 실행하십시오. 위의 문제를 해결하면 하드 디스크 감지 및 메모리 테스트를 시도 할 수 있습니다.
 PS 페더 링을 설정하는 방법?
Apr 06, 2025 pm 07:36 PM
PS 페더 링을 설정하는 방법?
Apr 06, 2025 pm 07:36 PM
PS 페더 링은 이미지 가장자리 블러 효과로, 가장자리 영역에서 픽셀의 가중 평균에 의해 달성됩니다. 깃털 반경을 설정하면 흐림 정도를 제어 할 수 있으며 값이 클수록 흐려집니다. 반경을 유연하게 조정하면 이미지와 요구에 따라 효과를 최적화 할 수 있습니다. 예를 들어, 캐릭터 사진을 처리 할 때 더 작은 반경을 사용하여 세부 사항을 유지하고 더 큰 반경을 사용하여 예술을 처리 할 때 흐릿한 느낌을줍니다. 그러나 반경이 너무 커서 가장자리 세부 사항을 쉽게 잃을 수 있으며 너무 작아 효과는 분명하지 않습니다. 깃털 효과는 이미지 해상도의 영향을받으며 이미지 이해 및 효과 파악에 따라 조정해야합니다.
 MySQL 설치 후 데이터베이스 성능을 최적화하는 방법
Apr 08, 2025 am 11:36 AM
MySQL 설치 후 데이터베이스 성능을 최적화하는 방법
Apr 08, 2025 am 11:36 AM
MySQL 성능 최적화는 설치 구성, 인덱싱 및 쿼리 최적화, 모니터링 및 튜닝의 세 가지 측면에서 시작해야합니다. 1. 설치 후 innodb_buffer_pool_size 매개 변수와 같은 서버 구성에 따라 my.cnf 파일을 조정해야합니다. 2. 과도한 인덱스를 피하기 위해 적절한 색인을 작성하고 Execution 명령을 사용하여 실행 계획을 분석하는 것과 같은 쿼리 문을 최적화합니다. 3. MySQL의 자체 모니터링 도구 (showprocesslist, showstatus)를 사용하여 데이터베이스 건강을 모니터링하고 정기적으로 백업 및 데이터베이스를 구성하십시오. 이러한 단계를 지속적으로 최적화함으로써 MySQL 데이터베이스의 성능을 향상시킬 수 있습니다.
