

웹 개발에서 속성을 감지하는 방법
이번에는 웹 개발에서 속성을 감지하는 방법과 웹 개발에서 속성을 감지할 때 주의사항에 대해 설명하겠습니다. 다음은 실제 사례입니다.
null(및 정의되지 않음)이 사용되는 시나리오는 다음과 같이 object에 속성이 존재하는지 확인할 때입니다.
// 不好的写法:检测假值if (object[propertyName]) {}// 不好的写法:和null相比较if (object[propertyName] != null) {}// 不好的写法:和undefined比较if (object[propertyName] != undefined) {}위 코드의 각 판단은 실제로 주어진 이름으로 확인됩니다. 주어진 이름이 가리키는 속성이 존재하는지 판단하는 대신 속성 값이 0, ""(빈 문자열 ), false, null 및 정의되지 않음과 같은 거짓 값인 경우 결과가 잘못되기 때문입니다. 결국 이는 해당 부동산의 법적 가치입니다. 예를 들어 속성이 숫자를 기록하는 경우 값은 0일 수 있습니다. 이 경우 위 코드의 첫 번째 판단에서 오류가 발생합니다. 비유하자면 속성 값이 null이거나 정의되지 않은 경우 세 가지 판단 모두 오류가 발생합니다.
속성이 존재하는지 확인하는 가장 좋은 방법은 in연산자를 사용하는 것입니다. in 연산자는 속성 값을 읽는 대신 속성이 존재하는지 여부만 확인합니다. 이렇게 하면 이 섹션 앞부분에서 언급한 모호한 설명을 피할 수 있습니다. in 연산자는 인스턴스 개체의 속성이 존재하거나 개체의 프로토타입에서 을 상속받은 경우 true를 반환합니다. 예:
var object = { count: 0, related: null};// 好的写法if ("count" in object) { // 这里的代码会执行}// 不好的写法:检测假值if (object["count"]) { // 这里的代码不会执行}// 好的写法if ("related" in object) { // 这里的代码会执行}// 好的写法if (object["related"] != null) { // 这里的代码不会执行}인스턴스 객체의 특정 속성이 존재하는지 여부만 확인하려면 hasOwnProperty() 메서드를 사용하세요. Object에서 상속받은 모든 JS 객체에는 이 속성이 인스턴스에 있으면 true를 반환하는 이 메서드가 있습니다. 이 속성이 프로토타입에만 있으면 false를 반환합니다. IE8 및 이전 버전의 IE에서는 DOM 객체가 Object에서 상속되지 않으므로 이 메서드가 포함되지 않습니다. 즉, hasOwnProperty() 메서드를 호출하기 전에 DOM 객체가 존재하는지 확인해야 합니다. 객체가 DOM이 아니라는 것을 이미 알고 있는 경우 이 단계를 생략할 수 있습니다.
// 对于所有非DOM对象来说,这是好的写法if (object.hasOwnProperty("related")) { // 执行这里的代码}// 如果你不确定是否为DOM对象,则这样来写if ("hasOwnProperty" in object && object.hasOwnProperty("related")) { // 执行这里的代码}IE8 및 이전 버전의 IE 상황으로 인해 인스턴스 객체의 속성이 존재하는지 확인할 때 in 연산자를 사용하는 것을 선호합니다. hasOwnProperty()는 인스턴스 속성을 확인해야 하는 경우에만 사용됩니다. 속성의 존재 여부를 확인해야 할 때마다 in 연산자나 hasOwnProperty()를 사용하세요. 이렇게 하면 많은 버그를 피할 수 있습니다.
이 기사의 사례를 읽은 후 방법을 마스터했다고 생각합니다. 더 흥미로운 정보를 보려면 PHP 중국어 웹사이트의 다른 관련 기사를 주목하세요!
추천 도서:
위 내용은 웹 개발에서 속성을 감지하는 방법의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7569
7569
 15
1386
52
87
11
62
19
28
108
15
1386
52
87
11
62
19
28
108

 Windows 11로 업그레이드할 수 없는 i7-7700에 대한 솔루션
Dec 26, 2023 pm 06:52 PM
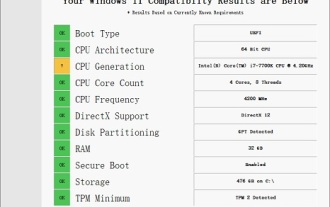
Windows 11로 업그레이드할 수 없는 i7-7700에 대한 솔루션
Dec 26, 2023 pm 06:52 PM
i77700의 성능은 win11을 실행하기에 충분하지만 사용자는 i77700을 win11로 업그레이드할 수 없다는 것을 알게 됩니다. 이는 주로 Microsoft에서 부과한 제한 사항 때문이므로 이 제한 사항을 건너뛰는 한 설치할 수 있습니다. i77700은 win11로 업그레이드할 수 없습니다. 1. Microsoft에서는 CPU 버전을 제한하기 때문입니다. 2. Intel의 8세대 이상 버전만 win11로 직접 업그레이드할 수 있습니다. 3. 7세대인 i77700은 win11의 업그레이드 요구 사항을 충족할 수 없습니다. 4. 하지만 i77700은 성능면에서 win11을 완벽하게 원활하게 사용할 수 있습니다. 5. 따라서 이 사이트의 win11 직접 설치 시스템을 사용할 수 있습니다. 6. 다운로드가 완료되면 파일을 마우스 오른쪽 버튼으로 클릭하고 "로드"합니다. 7. 더블클릭하여 "원클릭"을 실행합니다.
 MIT의 최신 걸작: GPT-3.5를 사용하여 시계열 이상 탐지 문제 해결
Jun 08, 2024 pm 06:09 PM
MIT의 최신 걸작: GPT-3.5를 사용하여 시계열 이상 탐지 문제 해결
Jun 08, 2024 pm 06:09 PM
오늘은 지난 주 MIT에서 발표한 기사를 소개하고자 합니다. GPT-3.5-turbo를 사용하여 시계열 이상 탐지 문제를 해결하고, 시계열 이상 탐지에서 LLM의 효율성을 초기에 검증한 내용입니다. 전체 과정에 미세한 조정은 없으며, 이상 탐지를 위해 GPT-3.5-turbo를 직접 사용하는 것이 이 글의 핵심이다. LLM이 이상 탐지 작업을 해결하도록 하는 프롬프트 또는 파이프라인입니다. 이 작품을 자세히 소개하겠습니다. 이미지 논문 제목: Large Languagemodelscanbezero-shotanomalydete
 Python의 dir() 함수: 객체의 속성과 메서드 보기
Nov 18, 2023 pm 01:45 PM
Python의 dir() 함수: 객체의 속성과 메서드 보기
Nov 18, 2023 pm 01:45 PM
Python의 dir() 함수: 개체의 속성 및 메서드 보기, 필요한 특정 코드 예제 요약: Python은 강력하고 유연한 프로그래밍 언어이며 내장된 함수와 도구는 개발자에게 많은 편리한 기능을 제공합니다. 매우 유용한 함수 중 하나는 dir() 함수로, 이를 통해 객체의 속성과 메서드를 볼 수 있습니다. 이 기사에서는 dir() 함수의 사용법을 소개하고 특정 코드 예제를 통해 해당 기능과 사용법을 보여줍니다. 텍스트: Python의 dir() 함수는 내장 함수입니다.
 탐지 알고리즘 개선: 고해상도 광학 원격탐사 이미지에서 표적 탐지용
Jun 06, 2024 pm 12:33 PM
탐지 알고리즘 개선: 고해상도 광학 원격탐사 이미지에서 표적 탐지용
Jun 06, 2024 pm 12:33 PM
01 전망 요약 현재로서는 탐지 효율성과 탐지 결과 간의 적절한 균형을 이루기가 어렵습니다. 우리는 광학 원격 탐사 이미지에서 표적 감지 네트워크의 효과를 향상시키기 위해 다층 특징 피라미드, 다중 감지 헤드 전략 및 하이브리드 주의 모듈을 사용하여 고해상도 광학 원격 감지 이미지에서 표적 감지를 위한 향상된 YOLOv5 알고리즘을 개발했습니다. SIMD 데이터 세트에 따르면 새로운 알고리즘의 mAP는 YOLOv5보다 2.2%, YOLOX보다 8.48% 우수하여 탐지 결과와 속도 간의 균형이 더 잘 이루어졌습니다. 02 배경 및 동기 원격탐사 기술의 급속한 발전으로 항공기, 자동차, 건물 등 지구 표면의 많은 물체를 묘사하기 위해 고해상도 광학 원격탐사 영상이 활용되고 있다. 원격탐사 이미지 해석에서 물체 감지
 조종석 웹 UI에서 관리 액세스를 활성화하는 방법
Mar 20, 2024 pm 06:56 PM
조종석 웹 UI에서 관리 액세스를 활성화하는 방법
Mar 20, 2024 pm 06:56 PM
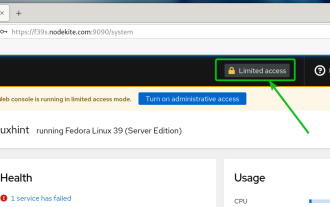
Cockpit은 Linux 서버용 웹 기반 그래픽 인터페이스입니다. 이는 주로 신규/전문가 사용자가 Linux 서버를 보다 쉽게 관리할 수 있도록 하기 위한 것입니다. 이 문서에서는 Cockpit 액세스 모드와 CockpitWebUI에서 Cockpit으로 관리 액세스를 전환하는 방법에 대해 설명합니다. 콘텐츠 항목: Cockpit 입장 모드 현재 Cockpit 액세스 모드 찾기 CockpitWebUI에서 Cockpit에 대한 관리 액세스 활성화 CockpitWebUI에서 Cockpit에 대한 관리 액세스 비활성화 결론 조종석 입장 모드 조종석에는 두 가지 액세스 모드가 있습니다. 제한된 액세스: 이는 조종석 액세스 모드의 기본값입니다. 이 액세스 모드에서는 조종석에서 웹 사용자에 액세스할 수 없습니다.
 실시간으로 SOTA를 추가하고 급상승하세요! FastOcc: 더 빠른 추론 및 배포 친화적인 Occ 알고리즘이 출시되었습니다!
Mar 14, 2024 pm 11:50 PM
실시간으로 SOTA를 추가하고 급상승하세요! FastOcc: 더 빠른 추론 및 배포 친화적인 Occ 알고리즘이 출시되었습니다!
Mar 14, 2024 pm 11:50 PM
위에 쓴 글 & 저자의 개인적인 이해는 자율주행 시스템에서 인지 작업은 전체 자율주행 시스템의 중요한 구성 요소라는 것입니다. 인지 작업의 주요 목표는 자율주행차가 도로를 주행하는 차량, 길가의 보행자, 주행 중 직면하는 장애물, 도로 위의 교통 표지판 등 주변 환경 요소를 이해하고 인지하여 하류에 도움을 주는 것입니다. 모듈 정확하고 합리적인 결정과 행동을 취하십시오. 자율주행 기능을 갖춘 차량에는 일반적으로 자율주행 차량이 정확하게 인식하고 인식할 수 있도록 서라운드 뷰 카메라 센서, 라이더 센서, 밀리미터파 레이더 센서 등과 같은 다양한 유형의 정보 수집 센서가 장착됩니다. 주변 환경 요소를 이해하여 자율 주행 중에 자율 차량이 올바른 결정을 내릴 수 있도록 합니다. 머리
 CSS의 하단 속성 구문
Feb 21, 2024 pm 03:30 PM
CSS의 하단 속성 구문
Feb 21, 2024 pm 03:30 PM
CSS의 하단 속성 구문 및 코드 예제 CSS에서 하단 속성은 요소와 컨테이너 하단 사이의 거리를 지정하는 데 사용됩니다. 상위 요소의 아래쪽을 기준으로 요소의 위치를 제어합니다. Bottom 속성의 구문은 다음과 같습니다. element{bottom:value;} 여기서 element는 스타일을 적용할 요소를 나타내고, value는 설정할 아래쪽 값을 나타냅니다. 값은 픽셀과 같은 특정 길이 값일 수 있습니다.
 AAAI2024: Far3D - 150m 시각적 3D 표적 탐지에 직접 도달하는 혁신적인 아이디어
Dec 15, 2023 pm 01:54 PM
AAAI2024: Far3D - 150m 시각적 3D 표적 탐지에 직접 도달하는 혁신적인 아이디어
Dec 15, 2023 pm 01:54 PM
최근 Arxiv에서 순수 시각적 서라운드 인식에 관한 최신 연구를 읽었습니다. 이 연구는 PETR 시리즈 방법을 기반으로 하며 장거리 표적 탐지의 순수 시각적 인식 문제를 해결하여 인식 범위를 150미터로 확장하는 데 중점을 둡니다. 본 논문의 방법과 결과는 우리에게 큰 참고가치가 있어 이를 해석해 보았습니다. 원제: Far3D: Expanding the Horizon for Surround-view3DObjectDetection 논문 링크: https://arxiv.org/abs/2308.09616 저자 소속 :Beijing Institute of Technology & Megvii Technology 과제 배경 자율주행 이해에 있어서 3D 객체 검출
