

PyTorch 병렬 훈련 DistributedDataParallel 전체 코드 예제

대규모 데이터 세트를 사용하여 대규모 심층 신경망(DNN)을 훈련시키는 문제는 딥 러닝 분야의 주요 과제입니다. DNN 및 데이터 세트 크기가 증가함에 따라 이러한 모델을 교육하는 데 필요한 계산 및 메모리 요구 사항도 늘어납니다. 이로 인해 컴퓨팅 리소스가 제한된 단일 시스템에서 이러한 모델을 교육하는 것이 어렵거나 불가능해집니다. 대규모 데이터 세트를 사용하여 대규모 DNN을 교육하는 데 따른 몇 가지 주요 과제는 다음과 같습니다.
- 긴 교육 시간: 모델의 복잡성과 데이터 세트의 크기에 따라 교육 프로세스를 완료하는 데 몇 주 또는 몇 달이 걸릴 수 있습니다.
- 메모리 제한: 대규모 DNN은 훈련 중에 모든 모델 매개변수, 기울기 및 중간 활성화를 저장하기 위해 많은 양의 메모리가 필요할 수 있습니다. 이로 인해 메모리 부족 오류가 발생하고 단일 머신에서 학습할 수 있는 모델 크기가 제한될 수 있습니다.
이러한 문제를 해결하기 위해 모델 병렬 처리, 데이터 병렬 처리, 하이브리드 병렬 처리는 물론 하드웨어, 소프트웨어, 알고리즘 최적화를 포함하여 대규모 데이터 세트가 포함된 대규모 DNN의 교육을 확장하기 위한 다양한 기술이 개발되었습니다.
이 기사에서는 PyTorch를 사용하여 데이터 병렬성과 모델 병렬성을 보여줍니다.

우리가 병렬성이라고 부르는 것은 일반적으로 훈련 시간을 단축하기 위해 여러 GPU 또는 여러 기계에서 심층 신경망(dnn)을 훈련하는 것을 의미합니다. 데이터 병렬화의 기본 아이디어는 훈련 데이터를 더 작은 덩어리로 분할하고 각 GPU 또는 기계가 별도의 데이터 덩어리를 처리하도록 하는 것입니다. 그런 다음 각 노드의 결과를 결합하여 모델 매개변수를 업데이트하는 데 사용합니다. 데이터 병렬 처리에서 모델 아키텍처는 각 노드에서 동일하지만 모델 매개변수는 노드 간에 분할됩니다. 각 노드는 할당된 데이터 청크를 사용하여 자체 로컬 모델을 훈련하고, 각 훈련 반복이 끝나면 모델 매개변수가 모든 노드에서 동기화됩니다. 이 과정은 모델이 만족스러운 결과로 수렴될 때까지 반복됩니다.
아래에서는 전체 코드 예제를 위해 ResNet50 및 CIFAR10 데이터 세트를 사용합니다.
데이터 병렬 처리에서 모델 아키텍처는 각 노드에서 동일하게 유지되지만 모델 매개변수는 노드 간에 분할되며 각 노드는 할당 데이터 청크를 사용하여 교육합니다. 자신의 지역 모델.
PyTorch의 DistributedDataParallel 라이브러리는 노드 전반에 걸쳐 기울기와 모델 매개변수를 효율적으로 전달하고 동기화하여 분산 교육을 달성할 수 있습니다. 이 기사에서는 ResNet50 및 CIFAR10 데이터 세트를 사용하여 PyTorch로 데이터 병렬 처리를 구현하는 방법에 대한 예를 제공합니다. 여기서 코드는 여러 GPU 또는 머신에서 실행되며 각 머신은 훈련 데이터의 하위 집합을 처리합니다. 훈련 프로세스는 PyTorch의 DistributedDataParallel 라이브러리를 사용하여 병렬화됩니다.
필요한 라이브러리를 가져옵니다
import os from datetime import datetime from time import time import argparse import torchvision import torchvision.transforms as transforms import torch import torch.nn as nn import torch.distributed as dist from torch.nn.parallel import DistributedDataParallel
다음으로 GPU를 확인하겠습니다.
import subprocess result = subprocess.run(['nvidia-smi'], stdout=subprocess.PIPE) print(result.stdout.decode())
여러 서버에서 실행해야 하기 때문에 수동으로 하나씩 실행하는 것은 실용적이지 않으므로 스케줄러가 필요합니다. 여기서는 SLURM 파일을 사용하여 코드를 실행합니다(slurmLinux 및 Unix 계열 커널용 무료 및 오픈 소스 작업 스케줄러).
def main():
# get distributed configuration from Slurm environment
parser = argparse.ArgumentParser()
parser.add_argument('-b', '--batch-size', default=128, type =int,
help='batch size. it will be divided in mini-batch for each worker')
parser.add_argument('-e','--epochs', default=2, type=int, metavar='N',
help='number of total epochs to run')
parser.add_argument('-c','--checkpoint', default=None, type=str,
help='path to checkpoint to load')
args = parser.parse_args()
rank = int(os.environ['SLURM_PROCID'])
local_rank = int(os.environ['SLURM_LOCALID'])
size = int(os.environ['SLURM_NTASKS'])
master_addr = os.environ["SLURM_SRUN_COMM_HOST"]
port = "29500"
node_id = os.environ['SLURM_NODEID']
ddp_arg = [rank, local_rank, size, master_addr, port, node_id]
train(args, ddp_arg)그런 다음 DistributedDataParallel 라이브러리를 사용하여 분산 교육을 수행합니다.
def train(args, ddp_arg):
rank, local_rank, size, MASTER_ADDR, port, NODE_ID = ddp_arg
# display info
if rank == 0:
#print(">>> Training on ", len(hostnames), " nodes and ", size, " processes, master node is ", MASTER_ADDR)
print(">>> Training on ", size, " GPUs, master node is ", MASTER_ADDR)
#print("- Process {} corresponds to GPU {} of node {}".format(rank, local_rank, NODE_ID))
print("- Process {} corresponds to GPU {} of node {}".format(rank, local_rank, NODE_ID))
# configure distribution method: define address and port of the master node and initialise communication backend (NCCL)
#dist.init_process_group(backend='nccl', init_method='env://', world_size=size, rank=rank)
dist.init_process_group(
backend='nccl',
init_method='tcp://{}:{}'.format(MASTER_ADDR, port),
world_size=size,
rank=rank
)
# distribute model
torch.cuda.set_device(local_rank)
gpu = torch.device("cuda")
#model = ResNet18(classes=10).to(gpu)
model = torchvision.models.resnet50(pretrained=False).to(gpu)
ddp_model = DistributedDataParallel(model, device_ids=[local_rank])
if args.checkpoint is not None:
map_location = {'cuda:%d' % 0: 'cuda:%d' % local_rank}
ddp_model.load_state_dict(torch.load(args.checkpoint, map_location=map_location))
# distribute batch size (mini-batch)
batch_size = args.batch_size
batch_size_per_gpu = batch_size // size
# define loss function (criterion) and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(ddp_model.parameters(), 1e-4)
transform_train = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
# load data with distributed sampler
#train_dataset = torchvision.datasets.CIFAR10(root='./data',
# train=True,
# transform=transform_train,
# download=False)
# load data with distributed sampler
train_dataset = torchvision.datasets.CIFAR10(root='./data',
train=True,
transform=transform_train,
download=False)
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset,
num_replicas=size,
rank=rank)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size_per_gpu,
shuffle=False,
num_workers=0,
pin_memory=True,
sampler=train_sampler)
# training (timers and display handled by process 0)
if rank == 0: start = datetime.now()
total_step = len(train_loader)
for epoch in range(args.epochs):
if rank == 0: start_dataload = time()
for i, (images, labels) in enumerate(train_loader):
# distribution of images and labels to all GPUs
images = images.to(gpu, non_blocking=True)
labels = labels.to(gpu, non_blocking=True)
if rank == 0: stop_dataload = time()
if rank == 0: start_training = time()
# forward pass
outputs = ddp_model(images)
loss = criterion(outputs, labels)
# backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
if rank == 0: stop_training = time()
if (i + 1) % 10 == 0 and rank == 0:
print('Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}, Time data load: {:.3f}ms, Time training: {:.3f}ms'.format(epoch + 1, args.epochs,
i + 1, total_step, loss.item(), (stop_dataload - start_dataload)*1000,
(stop_training - start_training)*1000))
if rank == 0: start_dataload = time()
#Save checkpoint at every end of epoch
if rank == 0:
torch.save(ddp_model.state_dict(), './checkpoint/{}GPU_{}epoch.checkpoint'.format(size, epoch+1))
if rank == 0:
print(">>> Training complete in: " + str(datetime.now() - start))
if __name__ == '__main__':
main()이 코드는 데이터와 모델을 여러 GPU에 분할하고 분산 방식으로 모델을 업데이트합니다. 다음은 코드에 대한 몇 가지 설명입니다.
train(args, ddp_arg)에는 args와 ddp_arg라는 두 개의 매개변수가 있습니다. 여기서 args는 스크립트에 전달된 명령줄 매개변수이고 ddp_arg에는 분산 훈련 관련 매개변수가 포함되어 있습니다.
rank, local_rank, size, MASTER_ADDR, port, NODE_ID = ddp_arg: ddp_arg에 분산 훈련 관련 매개변수의 압축을 풉니다.
순위가 0이면 현재 사용 중인 GPU 수와 마스터 노드 IP 주소 정보를 출력합니다.
dist.init_process_group(backend='nccl', init_method='tcp://{}:{}'.format(MASTER_ADDR, port), world_size=size, Rank=rank): NCCL 백엔드 그룹을 사용하여 분산 프로세스를 초기화합니다.
torch.cuda.set_device(local_rank): 이 프로세스에 대해 지정된 GPU를 선택합니다.
model = torchvision.models.ResNet50 (pretrained=False).to(gpu): torchvision 모델에서 ResNet50 모델을 로드하고 지정된 GPU로 이동합니다.
ddp_model = DistributedDataParallel(model, device_ids=[local_rank]): DistributedDataParallel 모듈에 모델을 래핑합니다. 이는 분산 교육을 수행할 수 있음을 의미합니다.
CIFAR-10 데이터 세트를 로드하고 데이터 향상 변환을 적용합니다.
train_sampler=torch.utils.data.distributed.DistributedSampler(train_dataset,num_replicas=size,rank=rank): DistributedSampler 객체를 생성하여 데이터 세트를 여러 GPU로 분할합니다.
train_loader =torch.utils.data.DataLoader(dataset=train_dataset,batch_size=batch_size_per_gpu,shuffle=False,num_workers=0,pin_memory=True,sampler=train_sampler): DataLoader 객체를 생성하면 데이터가 이는 분산 데이터 샘플링 DistributedSampler가 추가된다는 점을 제외하면 일반적인 교육 단계와 일치합니다.
지정된 에포크 수에 대해 모델을 훈련하고 분산 방식으로 Optimizer.step()을 사용하여 가중치를 업데이트합니다.
rank0은 각 라운드가 끝날 때마다 체크포인트를 저장합니다.
rank0은 10개의 배치마다 손실과 훈련 시간을 보여줍니다.
훈련이 끝나면 훈련 모델을 인쇄하는 데 소요된 총 시간도 순위 0입니다.
코드 테스트
는 1/2/3/4 GPU가 있는 1개의 노드, 6/8 GPU가 있는 2개의 노드, 그리고 3/4 GPU가 있는 각 노드를 사용하여 훈련되었습니다. Cifar10에서 Resnet50의 테스트는 다음과 같습니다. , 배치 크기는 각 테스트마다 동일하게 유지됩니다. 각 테스트를 완료하는 데 걸린 시간은 초 단위로 기록되었습니다. 사용되는 GPU 수가 증가할수록 테스트를 완료하는 데 필요한 시간이 감소합니다. 8개의 GPU를 사용했을 때 완료하는데 320초가 걸렸는데, 이는 기록된 가장 빠른 시간이다. 이는 확실하지만 GPU 수의 증가에 따라 훈련 속도가 선형적으로 증가하지 않는다는 것을 알 수 있습니다. 이는 Resnet50이 상대적으로 작은 모델이고 병렬 훈련이 필요하지 않기 때문일 수 있습니다.

여러 GPU에서 데이터 병렬성을 사용하면 특정 데이터 세트에서 심층 신경망(DNN)을 훈련하는 데 필요한 시간을 크게 줄일 수 있습니다. GPU 수가 증가하면 훈련 프로세스를 완료하는 데 필요한 시간이 감소하여 DNN을 병렬로 보다 효율적으로 훈련할 수 있음을 나타냅니다.
이 접근 방식은 대규모 데이터 세트나 복잡한 DNN 아키텍처를 처리할 때 특히 유용합니다. 여러 GPU를 활용하면 훈련 프로세스가 가속화되어 더 빠른 모델 반복 및 실험이 가능해집니다. 그러나 데이터 병렬성을 통해 달성되는 성능 향상은 통신 오버헤드 및 GPU 메모리 제한과 같은 요인으로 인해 제한될 수 있으며 최상의 결과를 얻으려면 세심한 조정이 필요하다는 점에 유의해야 합니다.
위 내용은 PyTorch 병렬 훈련 DistributedDataParallel 전체 코드 예제의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7489
7489
 15
1377
52
77
11
52
19
19
41
15
1377
52
77
11
52
19
19
41

 Python에서 BERT를 사용한 감정 분석 방법 및 단계
Jan 22, 2024 pm 04:24 PM
Python에서 BERT를 사용한 감정 분석 방법 및 단계
Jan 22, 2024 pm 04:24 PM
BERT는 Google이 2018년에 제안한 사전 훈련된 딥러닝 언어 모델입니다. 전체 이름은 BidirectionEncoderRepresentationsfromTransformers이며 Transformer 아키텍처를 기반으로 하며 양방향 인코딩의 특성을 가지고 있습니다. 기존 단방향 코딩 모델과 비교하여 BERT는 텍스트를 처리할 때 상황 정보를 동시에 고려할 수 있으므로 자연어 처리 작업에서 잘 수행됩니다. 양방향성을 통해 BERT는 문장의 의미 관계를 더 잘 이해할 수 있어 모델의 표현 능력이 향상됩니다. 사전 훈련 및 미세 조정 방법을 통해 BERT는 감정 분석, 이름 지정 등 다양한 자연어 처리 작업에 사용될 수 있습니다.
 일반적으로 사용되는 AI 활성화 함수 분석: Sigmoid, Tanh, ReLU 및 Softmax의 딥러닝 실습
Dec 28, 2023 pm 11:35 PM
일반적으로 사용되는 AI 활성화 함수 분석: Sigmoid, Tanh, ReLU 및 Softmax의 딥러닝 실습
Dec 28, 2023 pm 11:35 PM
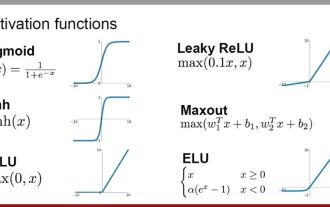
활성화 기능은 딥 러닝에서 중요한 역할을 하며 신경망에 비선형 특성을 도입하여 네트워크가 복잡한 입력-출력 관계를 더 잘 학습하고 시뮬레이션할 수 있도록 합니다. 활성화 함수의 올바른 선택과 사용은 신경망의 성능과 훈련 결과에 중요한 영향을 미칩니다. 이 기사에서는 일반적으로 사용되는 네 가지 활성화 함수인 Sigmoid, Tanh, ReLU 및 Softmax를 소개부터 시작하여 사용 시나리오, 장점, 단점과 최적화 솔루션은 활성화 기능에 대한 포괄적인 이해를 제공하기 위해 논의됩니다. 1. 시그모이드 함수 시그모이드 함수 공식 소개: 시그모이드 함수는 실수를 0과 1 사이에 매핑할 수 있는 일반적으로 사용되는 비선형 함수입니다. 통일하기 위해 자주 사용됩니다.
 ORB-SLAM3를 넘어! SL-SLAM: 저조도, 심한 흔들림, 약한 텍스처 장면을 모두 처리합니다.
May 30, 2024 am 09:35 AM
ORB-SLAM3를 넘어! SL-SLAM: 저조도, 심한 흔들림, 약한 텍스처 장면을 모두 처리합니다.
May 30, 2024 am 09:35 AM
이전에 작성했던 오늘은 딥 러닝 기술이 복잡한 환경에서 비전 기반 SLAM(동시 위치 파악 및 매핑)의 성능을 향상할 수 있는 방법에 대해 논의합니다. 심층 특징 추출과 깊이 일치 방법을 결합하여 저조도 조건, 동적 조명, 질감이 약한 영역 및 심한 지터와 같은 까다로운 시나리오에서 적응을 향상하도록 설계된 다목적 하이브리드 시각적 SLAM 시스템을 소개합니다. 우리 시스템은 확장 단안, 스테레오, 단안 관성 및 스테레오 관성 구성을 포함한 여러 모드를 지원합니다. 또한 시각적 SLAM을 딥러닝 방법과 결합하여 다른 연구에 영감을 주는 방법도 분석합니다. 공개 데이터 세트 및 자체 샘플링 데이터에 대한 광범위한 실험을 통해 위치 정확도 및 추적 견고성 측면에서 SL-SLAM의 우수성을 입증합니다.
 잠재 공간 임베딩: 설명 및 시연
Jan 22, 2024 pm 05:30 PM
잠재 공간 임베딩: 설명 및 시연
Jan 22, 2024 pm 05:30 PM
잠재 공간 임베딩(LatentSpaceEmbedding)은 고차원 데이터를 저차원 공간에 매핑하는 프로세스입니다. 기계 학습 및 딥 러닝 분야에서 잠재 공간 임베딩은 일반적으로 고차원 입력 데이터를 저차원 벡터 표현 세트로 매핑하는 신경망 모델입니다. 이 벡터 세트를 "잠재 벡터" 또는 "잠재 벡터"라고 합니다. 인코딩". 잠재 공간 임베딩의 목적은 데이터의 중요한 특징을 포착하고 이를 보다 간결하고 이해하기 쉬운 형식으로 표현하는 것입니다. 잠재 공간 임베딩을 통해 저차원 공간에서 데이터를 시각화, 분류, 클러스터링하는 등의 작업을 수행하여 데이터를 더 잘 이해하고 활용할 수 있습니다. 잠재 공간 임베딩은 이미지 생성, 특징 추출, 차원 축소 등과 같은 다양한 분야에서 폭넓게 응용됩니다. 잠재공간 임베딩이 핵심
 하나의 기사로 이해하기: AI, 머신러닝, 딥러닝 간의 연결과 차이점
Mar 02, 2024 am 11:19 AM
하나의 기사로 이해하기: AI, 머신러닝, 딥러닝 간의 연결과 차이점
Mar 02, 2024 am 11:19 AM
오늘날 급속한 기술 변화의 물결 속에서 인공지능(AI), 머신러닝(ML), 딥러닝(DL)은 정보기술의 새로운 물결을 이끄는 밝은 별과도 같습니다. 이 세 단어는 다양한 최첨단 토론과 실제 적용에 자주 등장하지만, 이 분야를 처음 접하는 많은 탐험가들에게는 그 구체적인 의미와 내부 연관성이 여전히 수수께끼에 싸여 있을 수 있습니다. 그럼 먼저 이 사진을 보시죠. 딥러닝, 머신러닝, 인공지능 사이에는 밀접한 상관관계와 진보적인 관계가 있음을 알 수 있습니다. 딥러닝은 머신러닝의 특정 분야이며, 머신러닝은
 매우 강하다! 딥러닝 알고리즘 상위 10개!
Mar 15, 2024 pm 03:46 PM
매우 강하다! 딥러닝 알고리즘 상위 10개!
Mar 15, 2024 pm 03:46 PM
2006년 딥러닝이라는 개념이 제안된 지 거의 20년이 지났습니다. 딥러닝은 인공지능 분야의 혁명으로 많은 영향력 있는 알고리즘을 탄생시켰습니다. 그렇다면 딥러닝을 위한 상위 10가지 알고리즘은 무엇이라고 생각하시나요? 다음은 제가 생각하는 딥 러닝을 위한 최고의 알고리즘입니다. 이들은 모두 혁신, 애플리케이션 가치 및 영향력 측면에서 중요한 위치를 차지하고 있습니다. 1. 심층 신경망(DNN) 배경: 다층 퍼셉트론이라고도 불리는 심층 신경망(DNN)은 가장 일반적인 딥 러닝 알고리즘으로 처음 발명되었을 때 최근까지 컴퓨팅 성능 병목 현상으로 인해 의문을 제기했습니다. 20년, 컴퓨팅 파워, 데이터의 폭발적인 증가로 돌파구가 찾아왔습니다. DNN은 여러 개의 숨겨진 레이어를 포함하는 신경망 모델입니다. 이 모델에서 각 레이어는 입력을 다음 레이어로 전달하고
 대형 모델에 대한 새로운 과학적이고 복잡한 질문 답변 벤치마크 및 평가 시스템을 제공하기 위해 UNSW, Argonne, University of Chicago 및 기타 기관이 공동으로 SciQAG 프레임워크를 출시했습니다.
Jul 25, 2024 am 06:42 AM
대형 모델에 대한 새로운 과학적이고 복잡한 질문 답변 벤치마크 및 평가 시스템을 제공하기 위해 UNSW, Argonne, University of Chicago 및 기타 기관이 공동으로 SciQAG 프레임워크를 출시했습니다.
Jul 25, 2024 am 06:42 AM
편집자 |ScienceAI 질문 응답(QA) 데이터 세트는 자연어 처리(NLP) 연구를 촉진하는 데 중요한 역할을 합니다. 고품질 QA 데이터 세트는 모델을 미세 조정하는 데 사용될 수 있을 뿐만 아니라 LLM(대형 언어 모델)의 기능, 특히 과학적 지식을 이해하고 추론하는 능력을 효과적으로 평가하는 데에도 사용할 수 있습니다. 현재 의학, 화학, 생물학 및 기타 분야를 포괄하는 과학적인 QA 데이터 세트가 많이 있지만 이러한 데이터 세트에는 여전히 몇 가지 단점이 있습니다. 첫째, 데이터 형식이 비교적 단순하고 대부분이 객관식 질문이므로 평가하기 쉽지만 모델의 답변 선택 범위가 제한되고 모델의 과학적 질문 답변 능력을 완전히 테스트할 수 없습니다. 이에 비해 개방형 Q&A는
 기초부터 실습까지 Elasticsearch 벡터 검색의 개발 이력을 검토해보세요.
Oct 23, 2023 pm 05:17 PM
기초부터 실습까지 Elasticsearch 벡터 검색의 개발 이력을 검토해보세요.
Oct 23, 2023 pm 05:17 PM
1. 소개 벡터 검색은 현대 검색 및 추천 시스템의 핵심 구성 요소가 되었습니다. 복잡한 객체(예: 텍스트, 이미지, 사운드)를 수치 벡터로 변환하고 다차원 공간에서 유사성 검색을 수행하여 효율적인 쿼리 매칭 및 추천을 가능하게 합니다. 기초부터 실습까지 Elasticsearch의 개발 이력을 살펴보세요. 벡터 검색_elasticsearch 유명한 오픈 소스 검색 엔진으로서 Elasticsearch의 벡터 검색 분야 개발은 항상 많은 관심을 받아왔습니다. 본 글에서는 각 단계의 특징과 진행 상황을 중심으로 Elasticsearch 벡터 검색의 개발 역사를 검토해 보겠습니다. 기록을 가이드로 삼아 모든 사람이 전체 범위의 Elasticsearch 벡터 검색을 설정하는 것이 편리합니다.
