

자율주행 개발 툴체인의 현황과 향후 동향에 대한 심도 있는 논의

자동차 산업의 '지능형' 발전 추세에 따라 다양한 L2 수준의 보조 운전 기능이 소비자를 유치하는 데 중요한 구성이 되었습니다. 반면, '소프트웨어 정의 자동차'라는 새로운 시대에는 자율 주행이 중요해졌습니다. 회사의 미래 발전을 위한 중요한 전략에 영향을 미치는 중요한 요소입니다.
이러한 상황에서 자동차 회사는 다음 질문에 대답해야 합니다. 자체 자율주행 시스템을 개발해야 하는가?
먼저 자율 주행 분야에서 여러 자동차 회사의 레이아웃을 살펴보겠습니다.
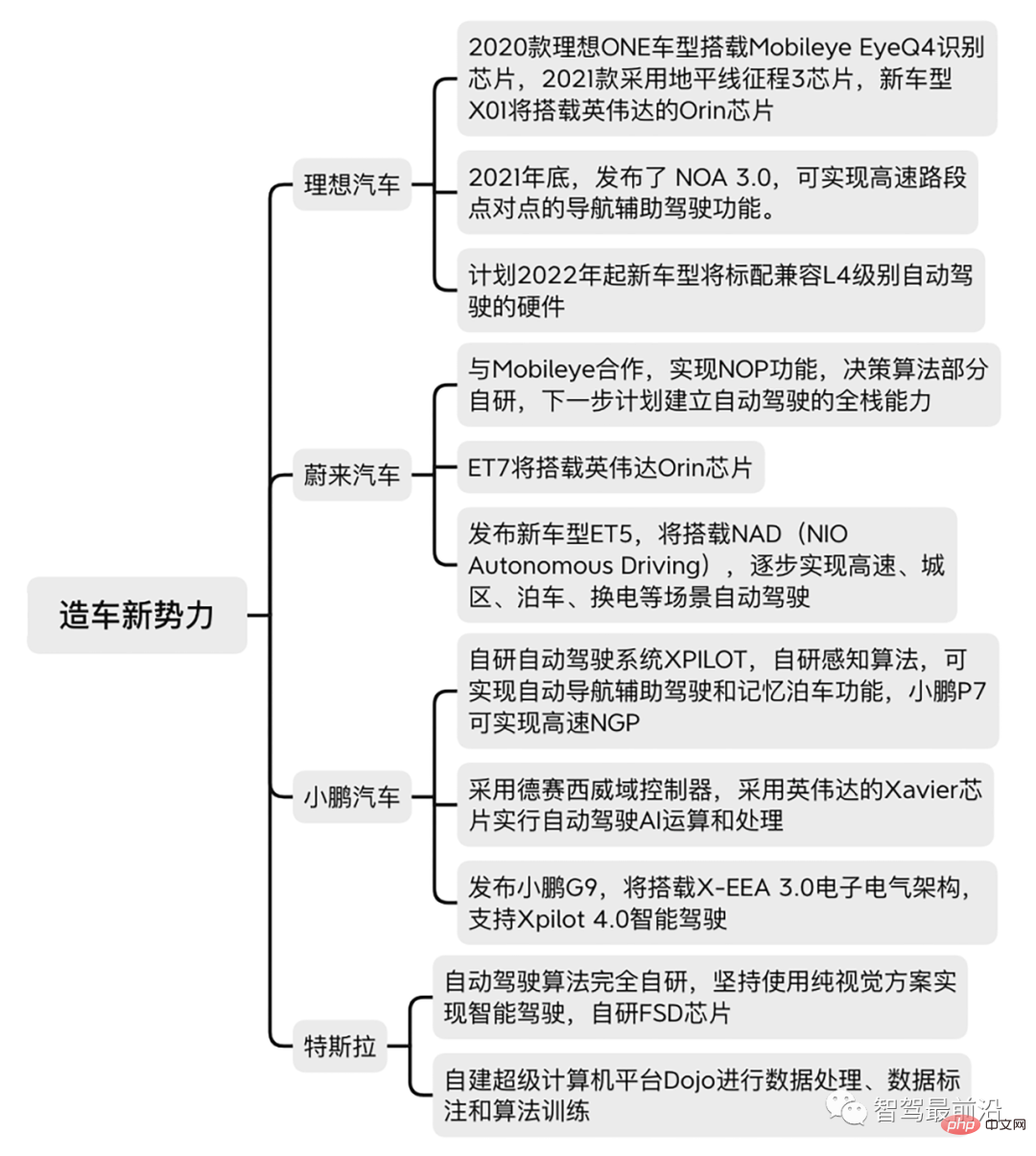
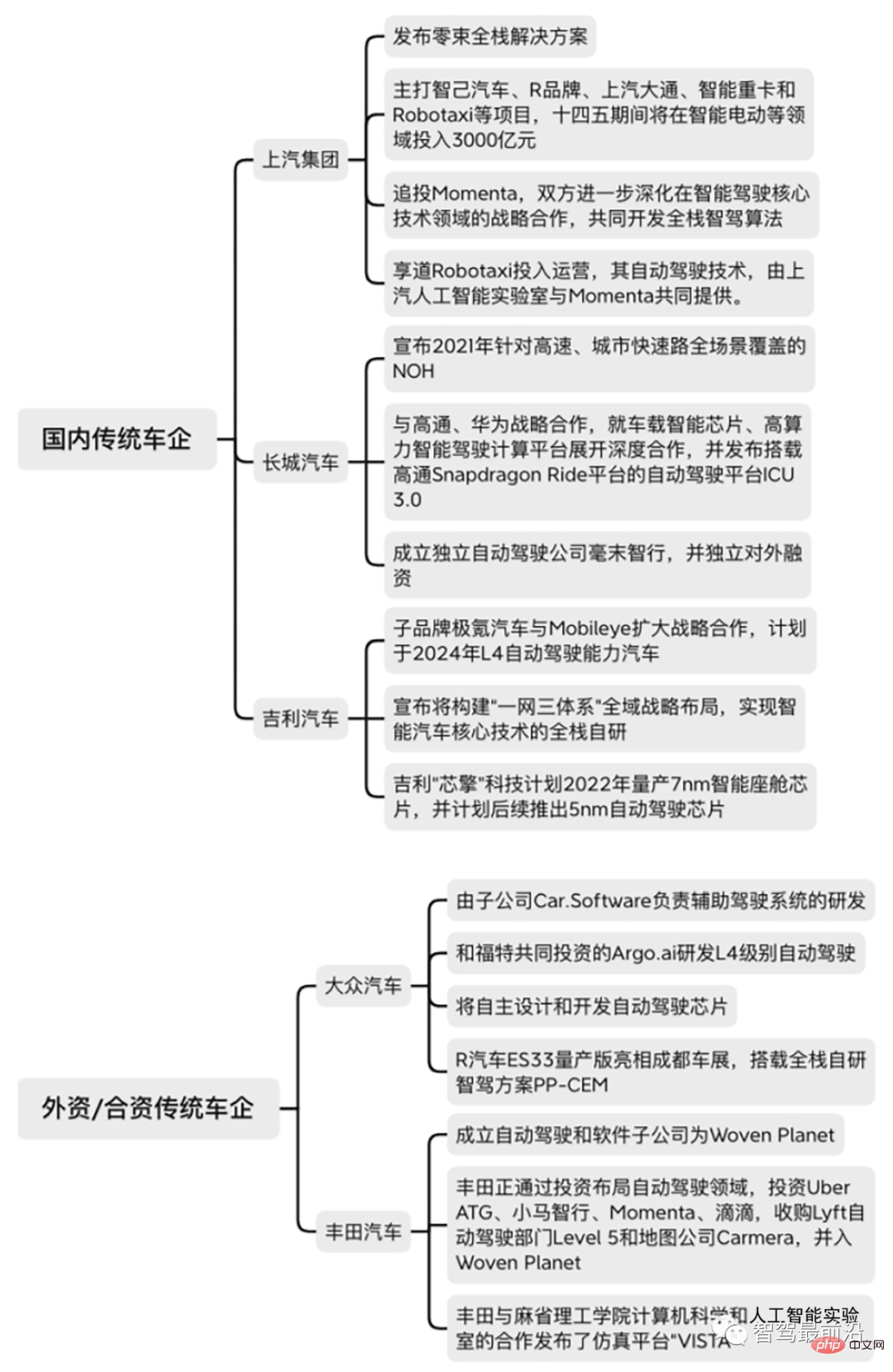
자동차 회사의 자율 주행 레이아웃 인벤토리
할 수 있습니다. 자율주행 시스템의 발전이 주요 트렌드로 자리 잡았으며, 많은 자동차 회사들도 자율주행의 핵심은 '소프트웨어와 하드웨어의 분리'라는 맥락에서 데이터의 가치를 최대한 활용하는 것임을 발견했습니다. 자동차 회사들은 자율주행 사업을 중시하고, 이후 사업 전개에도 편의를 위해 독립 자회사를 잇달아 설립해 지능형 주행 발전에 주력하고 있다. 예를 들어, FAW 그룹은 인공 지능 자회사인 FAW(Nanjing) Technology Development Co., Ltd.를 설립했으며, Great Wall Motors는 Hao Mo Zhixing을 설립했으며, SAIC 그룹은 SAIC Zero-Shu 등을 설립했습니다.
01 자율주행 개발 프로세스 - 모델 기반 설계에서 데이터 기반까지
그러나 자율주행 시스템의 개발 프로세스와 툴체인은 특히나 복잡한.
전통적인 자동차 소프트웨어 개발에서는 V 모델을 사용하며, 이 프로세스를 통해 개발되는 많은 ADAS 기능도 포함됩니다. 자세한 내용은 아래 그림을 참조하시기 바랍니다. 왼쪽은 설계 및 개발 과정, 오른쪽은 테스트 및 검증 과정입니다.
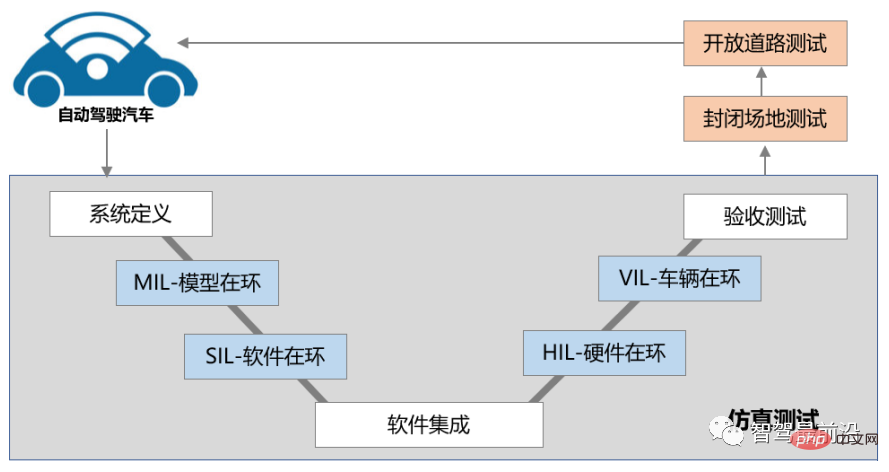
V 모델 개발 프로세스
왼쪽의 설계 및 개발 프로세스는 현재 MBD(Model Based Design) 개발 프로세스를 기반으로 하며, 대부분의 요소(모델)는 MathWorks 제품(MATLAB 및 Simulink)에서 제공하는 표준 도구 상자 및 블록 그룹을 사용하여 모델은 그래픽 인터페이스를 기반으로 구축되고 코드가 자동으로 생성됩니다. 엔지니어가 작성해야 하는 전체적인 코드의 양은 많지 않고, 개발 속도도 빠르고, 개발 비용도 저렴합니다.
오른쪽은 테스트 검증 프로세스, 즉 MIL/SIL/PIL/HIL/DIL/VIL 및 기타 테스트 방법을 포함하여 다양한 단계에서 다양한 테스트 방법을 사용하는 X in the loop입니다.
L2의 상대적으로 간단한 ADAS 기능을 포함한 기존 자동차 소프트웨어 제어 로직은 MBD+X in-the-loop 개발 프로세스를 사용하여 여전히 요구 사항을 충족할 수 있지만 자율 주행 알고리즘 기능이 점점 더 복잡해집니다. , 이전 MBD 기반의 개발 과정은 다소 부담스러워졌습니다.
우선 더욱 복잡한 자율주행 기능을 위해 소프트웨어 코드의 양과 기능의 복잡도도 몇 배로 늘어났습니다. 구조화된 툴박스와 블록 그룹 모델링은 간단한 기능적 알고리즘을 개발할 수 있지만, 복잡한 딥러닝 알고리즘에 직면했을 때 MBD는 유연성 측면에서 다소 확장된 것처럼 보입니다.
두 번째로, 인공지능 산업은 오랜 세월 동안 발전해왔기 때문에 아키텍처, 툴체인, 다양한 오픈소스 기능 라이브러리 등 오늘날의 자율주행 실무자에게는 프로그래밍을 직접 사용할 수 있는 강력한 생태계가 형성되었습니다. . 구현은 Mathworks에서 모델링하는 것보다 훨씬 효율적입니다.
동시에 전통적인 자동차 소프트웨어는 대량 생산 이후 더 이상 변하지 않을 것이며 이는 자율 주행 소프트웨어에 있어서는 비현실적입니다. 한편으로는 자율주행의 개발 주기가 길고 차량 개발 주기 내에서 개발 및 테스트 시간이 충분하지 않습니다. 반면에 OTA는 소프트웨어를 지속적으로 업그레이드하여 수명을 연장할 수 있습니다. 소프트웨어의 주기도 확장되고, 딥러닝을 통해 모델로 표현되는 자율주행 알고리즘은 롱테일 '코너 케이스' 데이터를 '연료'로 지속적으로 수집하여 알고리즘 시스템을 지속적으로 반복해야 합니다.
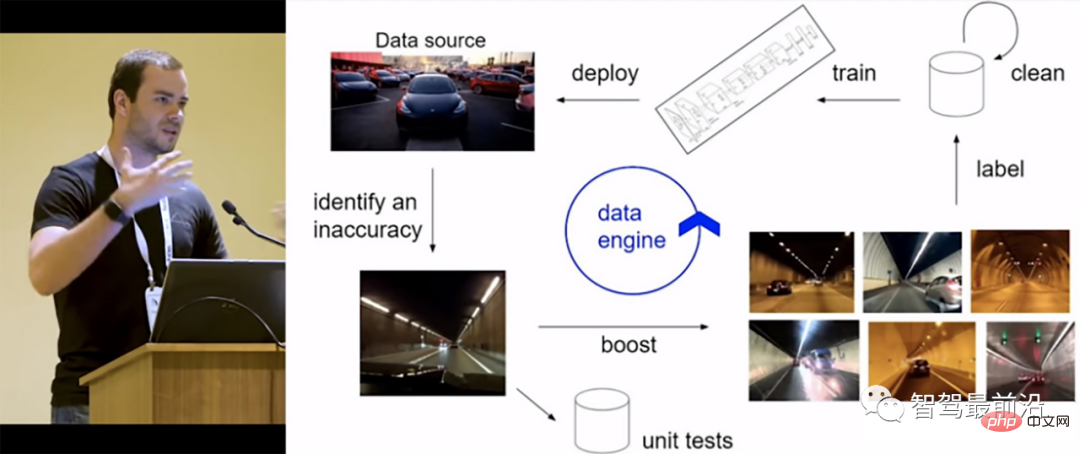
우주에 가려면 우주선을 만들어야 한다는 말이 있죠. 자율주행 시스템을 보다 효율적으로 개발하기 위해 업계 전문가들은 딥러닝 기반의 적합한 자율주행 개발 프로세스, 즉 데이터 중심의 엔드투엔드 개발 프로세스를 찾아냈습니다.
미래를 내다보는 자동차 회사와 Tier 1 역시 소프트웨어 개발 프로세스의 이러한 변화를 인지하고 있었습니다.
Bosch Chassis Control Systems China 사장 Chen Liming은 공개적으로 다음과 같이 언급한 적이 있습니다. “자율 주행에는 너무 많은 시나리오가 포함되어 기존 방식으로는 계속할 수 없으므로 실제 도로 테스트, 특히 데이터 기반 테스트가 포함되어야 합니다. 자율주행의 안전성을 검증하는 검증 방법은 V 모델과 데이터 기반 폐루프를 결합해 안전성 검증을 이루는 것”이라고 범아시아기술센터 수석이사 루젠샹(Lu Jianxiang)은 최근 열린 세계정보회의(World Intelligence Conference)에서 이렇게 말했다. 기존 차량은 자동차 측면의 원래 폭포형 시스템 통합 개발 모델에서 클라우드-파이프 엔드 통합의 민첩한 시나리오 통합 개발 모델로 전환해야 합니다. "물론 이것이 전통적인 MBD 방식이 완전히 제거되었습니다. V 모델의 아이디어는 여전히 매우 유익합니다. 예를 들어 자율 주행 시스템 테스트에서 중요한 역할을 하는 시스템 시뮬레이션은 실제로 SIL(소프트웨어 변경)이며 MBD 개발 방법은 기본 논리 알고리즘을 사용합니다. 차량 제어 알고리즘과 같은 자동차는 .
각 회사의 데이터 기반 소프트웨어 개발 프로세스는 세부적으로 다르지만 일반적인 아이디어는 동일하며 기본적으로 데이터 수집->데이터 저장->데이터 전처리->데이터 마이닝->데이터 주석을 따릅니다. ->모델 훈련->시뮬레이션 테스트->배포 및 출시.
Waymo의 데이터 폐쇄 루프 플랫폼, Huang Yu의 Zhihu 기사에서 인용
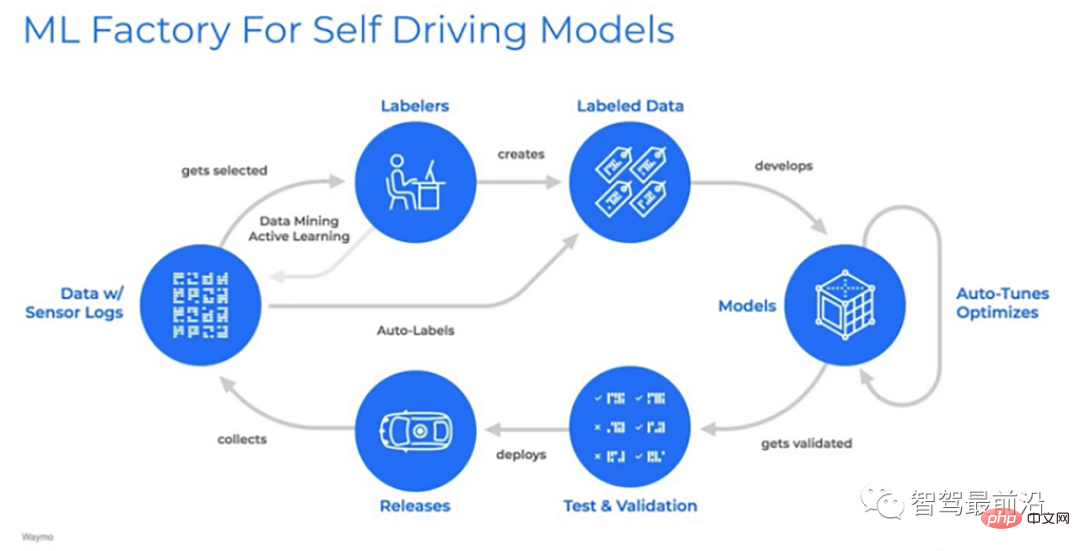
단계가 많지 않은 것처럼 보이지만 실제로는 전체 링크가 매우 복잡합니다.
데이터 처리를 예로 들면 카메라 데이터, 밀리미터파 레이더 데이터, LiDAR 포인트 클라우드 데이터 등 다양한 유형의 데이터가 먼저 제거되어야 하는데, 이를 소위 "데이터 클리닝"이라고 합니다. " . 사진을 예로 들면, 데이터 처리를 위해서는 먼저 사진의 지리적 위치 정보를 삭제하고, 얼굴, 자동차 번호판 등 민감한 정보를 제거한 후, 처리가 완료되기 전에 형식을 통일해야 합니다.
데이터 처리가 완료된 후 다음 단계는 데이터 주석을 시작하는 것입니다. 주석의 종류는 크게 2D, 3D 대상 객체 주석, 관절 주석, 차선 주석, 의미 분할 등으로 나눌 수 있습니다. 또한 특정 주석 사양 및 주석 품질 검사 프로세스도 포함됩니다.
이 복잡한 프로세스의 모든 링크에는 해당 도구와 플랫폼의 지원이 필요합니다.
이미 성숙한 툴체인을 갖춘 MBD 개발 프로세스와 달리 데이터 기반 개발 프로세스는 늦게 시작되고 툴체인이 비효율적이어서 자동차 회사의 자율주행 개발자에게 큰 어려움을 안겨줍니다.
데이터 중심, 데이터의 양은 방대하지만 가치가 높은 데이터가 부족한 문제에 직면한 자동차 회사는 데이터를 활용할 경험이 많지 않습니다.
물론, 자동차 회사마다 자율주행 분야의 축적 수준이 다르고, 툴체인에서도 서로 다른 문제에 직면합니다.
일부 자동차 회사는 일찍 시작하여 막대한 투자를 했습니다. (데이터 기반) 파이프라인이 완전히 실행되었으며 효율성을 더욱 향상시키기 위해 툴 체인의 맞춤형 개발도 많이 수행했습니다. 한 자동차 회사의 개발자는 "Jiuzhang Zhijia"에 여러 회사에서 제공하는 기존 툴 체인이 '분할된 개발'이기 때문에 전체 상황이 아닌 부분적인 기능에만 집중하여 심각한 조각화 및 '데이터 섬'이 발생한다고 말했습니다. . 자신의 효율성 요구 사항을 충족하려면 자체 도구 체인을 개발하거나 생태계에서 이를 제공할 회사를 찾아야 합니다. 심지어 데이터 주석 플랫폼도 스스로 개발해야 합니다.
이 분야에 대한 경험이 많지 않은 자동차 회사의 경우, 현 단계에서 툴 체인 개발에 너무 많은 인력을 투자하는 것은 그다지 "비용 효율적"이지 않습니다. 한편으로는 기반이 약하고 아직까지 기술이 발달하지 않은 반면, 실제로는 그렇게 많은 사람이 없었습니다. 리소스 투자 및 기술 기반의 제한으로 인해 그들은 여전히 기성 도구 체인을 통합하고 가능한 한 빨리 (데이터 기반) 파이프라인을 실행하기를 희망합니다. "도구 체인은 우리의 경쟁력이 아닙니다. 요구 사항 정의, 시스템 통합 및 기능 테스트는 '경쟁력'이라고 한 자동차 회사의 지능형 운전 담당자가 '지능형 운전 9장'에 대해 말했다.
자동차 회사마다 개발 단계가 다르지만 유사점도 있습니다. 즉, 모두 툴 체인의 "조각화"라는 문제점을 가지고 있습니다. 다음으로는 각각 데이터 처리와 시뮬레이션의 두 링크에서 시작하여 툴 체인의 현재 상황과 문제점을 자세히 정리하겠습니다.
02 데이터 처리: 데이터 중심의 초석
데이터 중심, 핵심은 데이터입니다.
기존의 모델 기반 개발 프로세스는 개발자의 과거 경험을 기반으로 모델을 최적화하는 데 중점을 두는 반면, 데이터 기반 최적화는 방대한 양의 데이터를 기반으로 합니다. 자동차 회사가 데이터 기반 개발 프로세스를 구축하려면 방대한 데이터를 다루는 방법을 배워야 합니다.
데이터 처리는 데이터 수집, 데이터 전처리, 데이터 마이닝, 데이터 주석을 포함하는 전체 개발 체인에서 처음이자 가장 복잡한 링크입니다. 데이터의 양과 데이터의 품질이 전체 모델의 수준을 직접적으로 결정합니다. .
아래 사진은 Tesla의 오토파일럿 데이터 처리 링크입니다.
Tesla Autopilot 데이터 처리 프로세스(Huang Yu의 Zhihu 기사에서 인용)
데이터 관련 도구 체인에는 데이터 수집, 데이터 업로드, 데이터 정리, 데이터 주석 등이 포함됩니다.
1. 데이터 수집: 지능이 필수입니다
데이터 수집에 대해 먼저 이야기해 보겠습니다.
업계에는 기본 알고리즘 훈련에 사용할 수 있는 오픈 소스 데이터 세트가 있습니다. 현재 가장 일반적으로 사용되는 데이터 세트에는 KITTI, nuScenes 등이 있습니다. 그러나 이러한 데이터의 대부분은 해외 공개 테스트 세트에서 나옵니다. 및 중국 지역 특성 데이터 세트는 여전히 상대적으로 적습니다.
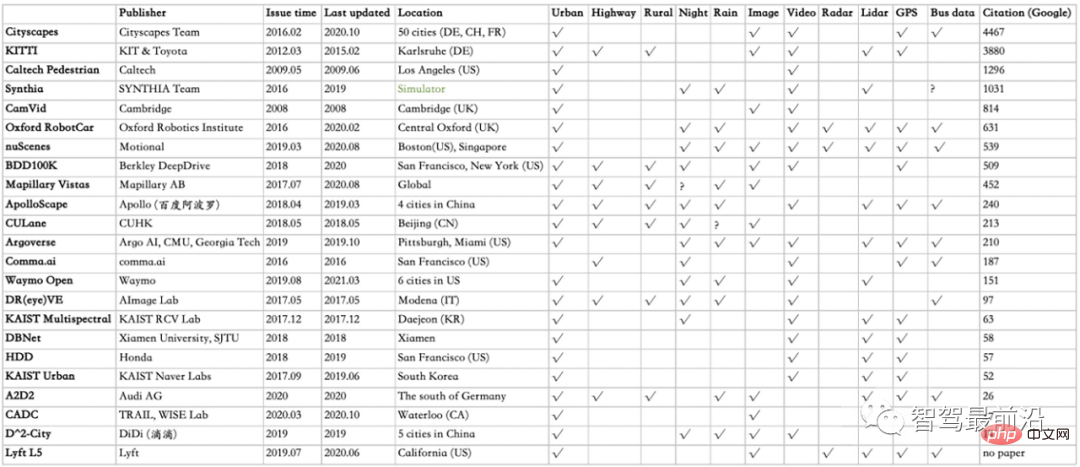
Zhihu 기사 "자율 운전을 위한 오픈 소스 데이터 세트 요약"을 인용하여 자율 주행을 위한 오픈 소스 데이터 세트 요약
이 경우 일치하는 알고리즘을 훈련하려면 특정 시나리오의 경우 시나리오 데이터를 수집해야 합니다. 충분하고 고품질의 데이터가 수집되어야 후속 프로세스가 구현될 수 있습니다. 이 첫 번째 링크의 경우 현재 도구 체인의 효율성이 그리 좋지 않습니다.
주요 신차 제조 업체의 한 직원은 "나인 챕터 스마트 드라이빙"에 회사의 자율 주행 데이터 수집 트리거 및 데이터 업로드 전략이 후속 문제 분석 요구 사항을 충족할 수 없다고 말했습니다. 예를 들어, 사용자가 자동차 사고를 낸 후 반환된 데이터를 사용할 수 없습니다. 데이터 양이 불완전하거나 수집 빈도가 정확하지 않아 개발자가 문제를 해결하는 데 매우 비효율적입니다.
일반적으로 코너 케이스마다 후속 분석을 위해 다양한 데이터 형식과 기간이 필요합니다. 인식이나 의사결정 모듈의 문제인지, 고정밀 지도의 오류인지 등 다양한 이유로 발생한 인수에는 당연히 다른 데이터가 필요합니다. 일부 특수한 경우에도 일부 맞춤형 데이터 수집 요구 사항이 있어 테스터가 도로 테스트를 위한 수집 작업을 수행할 수 있습니다.
정확하게는 수집 요구 사항이 복잡하고 링크 열기가 어렵기 때문에 실제로 일부 엔지니어는 문제가 발생하면 직접 데이터를 수집하는 것을 선택합니다.
위의 문제를 피하기 위해 일부 L4 Robotaxi 회사는 가장 원시적인 "하드 디스크 복사" 방법을 사용하여 전체 양의 데이터를 다시 전송한 다음 데이터 마이닝을 수행하는 방법을 선택합니다.
테스트 차량이 적을 때 해도 문제가 없습니다. 후속 차량이 일정 수준에 도달하면 자율주행으로 수집되는 데이터의 양은 곧 PB 시대로 접어들게 됩니다. "대량" 데이터, 우리는 정말로 귀중한 정보를 찾을 수 있습니다. 작은 비율을 차지하는 코너 케이스는 진정한 "건초 더미 속의 바늘"입니다.
자율주행에 정말 유용한 단편화된 데이터를 수집하려면 보다 지능적인 데이터 수집 전략이 필요합니다.
지능형 데이터 수집 전략이란 무엇인가요? 특정 시나리오에 대한 데이터를 수집하는 것입니다.
Huawei 내부 직원은 'Nine Chapters Smart Driving'과 소통하면서 'Huawei Octopus'에 장면에 지능적으로 라벨을 지정하는 기능이 있다고 언급했습니다. , 비보호 좌회전 등 클라우드가 학습을 위해 데이터를 적극적으로 수집하고 축적해야 하는 급행 세발자전거와 같은 시나리오 개발자는 차량에서 획득해야 하는 사진을 업로드하고 클라우드를 통해 지시를 내릴 수 있으며, 차량은 유사한 '사진 검색' 방법을 채택합니다. 이러한 방식으로 유사한 시나리오를 자동으로 차단하면 태그가 지정된 '가치 있는' 데이터를 필터링하여 클라우드에 업로드하기만 하면 됩니다. 전체 데이터 업로드를 방지하고 코너케이스 마이닝의 효율성을 높입니다.”
2. 데이터 주석: 아웃소싱 추세 및 고품질, 저렴한 가격 추구
가치 있는 데이터를 찾은 후 데이터 정리 및 데이터 주석을 수행합니다. 필수의.
딥 러닝 기반 인식 모델에서 주류 딥 러닝 훈련 방법은 여전히 지도 학습입니다. 이 방법을 사용하여 훈련하려면 모델에 "실제 진실"이 포함된 대량의 데이터를 "공급"해야 합니다.
그렇다면 이러한 "진정한 가치" 데이터는 어디서 오는 걸까요? 수동으로 표시됩니다.
그래서 업계에서는 인공지능이 "인간 근로자만큼 지능이 있다"는 농담을 자주 하곤 합니다. 대규모 데이터 주석에 대한 수요로 인해 "인공지능 트레이너"라는 새로운 직업이 탄생했습니다.
직업 이름이 듣기에는 좋지만 사실 데이터 주석은 본질적으로 노동집약적인 산업입니다. 충분히 저렴한 노동력을 확보하기 위해 기업들은 신장, 허난, 산시 등 특정 지역에 모여 데이터 주석을 위한 산업 클러스터를 형성했습니다.
고객(라벨 수요자)으로서는 라벨링 품질이 좋은지, 라벨링 가격이 충분히 저렴한지 걱정합니다. 즉, "말은 빨리 달리고 말은 풀을 먹지 말아야 합니다. ." .
우선, 모델 훈련에는 주석이 달린 높은 품질의 데이터가 필요합니다. 데이터 품질은 훈련된 모델의 정확도를 직접적으로 결정합니다. 품질이 높지 않으면 "쓰레기 넣기, 버리기" 쉽습니다. 주석 품질은 주석 비용과 밀접한 관련이 있습니다. 경제적으로 낙후된 지역에서 저렴한 노동력의 주석 품질이 개발자의 요구를 충족할 수 있는지 여부는 큰 문제입니다.
두 번째로, 주석을 달아야 하는 데이터의 양이 엄청납니다. 예를 들어 새로운 시각적 알고리즘에는 일반적으로 학습을 위해 주석이 달린 이미지가 수만 개에서 수십만 개가 필요합니다. 주석 가격은 약간 다릅니다. 수십만 장의 사본을 고려하면 엄청난 숫자입니다. 따라서 수요 측면은 가격에 매우 민감합니다.
고품질 라벨링 요구사항은 필연적으로 인건비 증가로 이어지는 반면, 낮은 가격은 라벨링 품질에 영향을 미칩니다. 높은 품질과 저렴한 가격은 양립할 수 없는 모순이 된 것 같습니다.
자동차 회사 입장에서 데이터 주석 작업을 위해 수십 명을 키우는 것은 인건비가 너무 부담스러워 보일 것입니다. 그들은 일반적으로 전문적인 데이터 주석 플랫폼이나 데이터 주석 팀에 아웃소싱하는 것을 선호합니다. 더 유명한 데이터 주석 플랫폼으로는 Baidu Zhongchai, JD Zhongzhi, My Neighbor Totoro Data, Datatang 등이 있습니다.
그러나 아웃소싱도 두 가지 범주로 나뉩니다. 첫 번째 범주는 주석 플랫폼과 주석 도구 자체를 제공하는 휴먼 아웃소싱이고, 아웃소싱 회사는 인력만 제공하면 됩니다. 두 번째 범주는 서비스 아웃소싱입니다. 즉, 라벨링할 데이터를 아웃소싱 업체에 직접 제공하는 주석 플랫폼 자체와 라벨링 도구를 제공하지 않으며, 라벨링된 데이터를 아웃소싱 업체에서 제공한다.
일부 자동차 회사는 라벨링 효율성에 대한 높은 요구 사항을 갖고 자체 라벨링 플랫폼과 라벨링 도구를 개발하기로 선택하므로 인적 아웃소싱을 선택하는 반면, 다른 자동차 회사의 경우 자체 라벨링 플랫폼을 개발하는 것은 분명히 비용 효율적이지 않습니다. - —애노테이션 플랫폼을 개발하기 위해서는 많은 자원이 투자되어야 하는 반면, 자체 개발한 애노테이션 플랫폼은 외부 플랫폼에 비해 가격적인 이점이 없고 비용 효율적이지 않습니다.
시장 수요의 폭발로 인해 데이터 주석 업계에 많은 스타트업 기업이 등장했습니다. Data.forge의 창립자이자 CEO인 Yang Yang이 "Nine Chapters Smart Driving"을 소개했습니다. 품질/가격 비율을 향상시키기 위해 자동화된 보조 주석, 주석 도구의 편의성 최적화 등 많은 조치를 취했으며 이는 회사의 핵심 경쟁력이기도 합니다.
"Nine Chapters Smart Driving"을 소개하면서 Huawei 내부자들은 "Huawei Octopus"가 데이터 주석 서비스도 제공한다고 언급했습니다.
"우선 'Huawei Octopus'는 자체 연마에 많은 시간을 들였습니다. 화웨이의 사전 주석 알고리즘은 NuScenes, COCO, KITTI 등 자율주행을 위한 여러 국제 공개 데이터 세트 테스트에서 1위를 차지했습니다. 사전 주석 알고리즘은 소요 시간을 크게 단축할 수 있습니다.
"둘째, 주석 플랫폼의 운영을 최적화하기 위해 특정 비즈니스 운영을 기반으로 인간-컴퓨터 상호 작용 방식을 최적화하고 직원의 운영 효율성을 향상시킵니다.
“다시 한번, 우리는 주석의 품질을 보장하기 위한 성숙한 관리 시스템을 갖추고 있습니다. 주석자가 주석을 완성한 후 주석자의 자체 검사, 품질별 무작위 검사의 3중 품질 검사 과정을 거쳐 배송됩니다. 주석 관리자가 검사관과 무작위 검사를 수행합니다. 대부분의 주석 작성자가 신장, 허난, 산시 및 기타 지역에 있는 다른 주석 팀과 달리 Huawei의 수동 주석 팀은 선전에 위치하고 있으며 그 이유는 의사소통을 원활하게 하기 위한 것입니다.
"마지막으로 부족한 로컬 오픈소스 데이터 세트 문제를 해결하기 위해 'Huawei Octopus'는 고객에게 증분 데이터 주석 서비스도 제공할 수 있습니다. 2천만 개의 주석이 달린 개체, 이 데이터 세트는 지속적으로 반복되고 확장됩니다. 고객은 이러한 데이터를 교육에 사용하고 모델을 빠르게 구축할 수 있습니다. ”
03 시뮬레이션 - 자율주행 개발의 가속기
자율주행 툴체인의 핵심 부분인 시뮬레이션 시스템은 크게 장면 라이브러리, 시뮬레이션 플랫폼, 평가 시스템의 세 부분으로 구성됩니다. 시뮬레이션 시스템은 전체 개발 링크의 효율성에 영향을 미치기 때문에 항상 고객의 불만 사항이었으며 많은 플레이어가 목표로 하는 시장이기도 합니다.
바로 그 이유는 바로 그 중요성과 '세상은 넓고 할 일은 많다'는 걸 뼈저리게 느낄 만큼 시뮬레이션 시스템이 미성숙한 상태에 있고, 많은 플레이어들이 이 트랙에 들어섰습니다. 이들 플레이어는 회사 유형에 따라 대략 세 가지 범주로 나눌 수 있습니다. 전통적인 시뮬레이션 소프트웨어 회사, 스타트업 시뮬레이션 소프트웨어 회사 및 기술 거대 시뮬레이션 소프트웨어를 아래에서 살펴보겠습니다.
1. 시뮬레이션 소프트웨어 플레이어 목록
(1) 전통적인 시뮬레이션 소프트웨어 회사
전통적인 시뮬레이션 소프트웨어는 Siemens의 PreScan, 독일의 VIRES사의 VTD, 독일의 IPG사의 CarMaker, 미국의 MSC의 CarSim 등으로 대표되며 특정 분야에서 축적이 깊거나 특정 기능에 있어서 뛰어난 성능으로 인해 널리 사용되고 있습니다. 자동차 회사: CarMaker와 CarSim은 차량 동역학 분야에서 가장 깊은 축적과 가장 강력한 강점을 가지고 있습니다. VTD는 높은 장면 렌더링 기능을 갖추고 있으며 최초로 OpenX를 지원합니다. 잘 알려진 PreScan은 작동이 간편하고
기존 고객 자원과 과거에 축적된 이점을 바탕으로 자율 주행 시뮬레이션 소프트웨어 분야에서 중요한 역할을 하고 있습니다
.(2) 스타트업 시뮬레이션 소프트웨어 회사
는 시뮬레이션 소프트웨어의 거대한 시장 공간을 보았고 스타트업 회사의 많은 새로운 플레이어도 파이 한 조각을 얻기 위해 진출했습니다. 예를 들어, 국내 스타트업 51WORLD(이전 51VR)는 51Sim-One 자율주행 시뮬레이션 테스트 플랫폼을 출시했으며, 이스라엘 스타트업 Cognata는 다양한 고객의 요구를 충족하기 위해 지능형 주행 제품의 각 단계에 대해 서로 다른 시뮬레이션 솔루션을 제공합니다. 로컬 출시 버전, 클라우드 버전, 하드웨어 버전의 세 가지 버전이 있습니다.
스타트업 기업은 시장에 더 민감하고 역사적 수하물이 없습니다. 그들이 자동차 회사에 제공하는 시뮬레이션 플랫폼은 시뮬레이션의 모든 측면을 의식적으로 개방하기 시작했으며 무시할 수 없는 힘이 되었습니다.
(3) 기술 거대 시뮬레이션 소프트웨어 회사
NVIDIA: Drive Constellation
NVIDIA는 2018년에 Drive Constellation 시뮬레이션 시스템을 출시했습니다. 시뮬레이션 시스템은 두 개의 서로 다른 서버로 구축되며, 첫 번째 서버는 카메라, 라이더, 밀리미터파 레이더 등 센서 시뮬레이션을 위한 NVIDIA DRIVE Sim 소프트웨어를 실행하고, 두 번째 서버는 NVIDIA DRIVE Pegasus 인공지능 차량 컴퓨팅 플랫폼을 탑재합니다. 시뮬레이션된 센서 데이터.
Drive Sim은 Omniverse 플랫폼을 기반으로 하며 NVIDIA 관계자에 따르면 "사실적이며 물리적으로 정확한" 센서 시뮬레이션을 달성할 수 있습니다. 시나리오 측면에서 Drive Constellation은 데이터 스트림을 생성하고, 다양한 테스트 환경을 만들고, 다양한 기상 조건은 물론 다양한 도로 표면과 지형을 시뮬레이션할 수 있으며, 낮에는 다양한 시간에 눈부시게 밝은 조명을 시뮬레이션하고 밤에는 제한된 시야를 시뮬레이션할 수도 있습니다.
화웨이: 'HUAWEI Octopus' 자율주행 클라우드 서비스
자율주행 개발 툴 체인 분야에서 화웨이는 데이터로부터 'HUAWEI Octopus'(HUAWEI Octopus)라고도 알려진 자율주행 클라우드 서비스를 출시했습니다. 수집, 하드 케이스 마이닝, 데이터 주석, 알고리즘 교육, 시뮬레이션 플랫폼 등의 측면에서 완벽한 솔루션을 제공하고 고객이 사용할 수 있는 대량의 데이터 세트 및 시나리오 라이브러리를 제공하여 자동차 회사가 데이터 중심 폐쇄형 시스템을 구축할 수 있도록 지원합니다. 루프 자율주행 개발 플랫폼.
또한 Huawei의 강력한 클라우드 비즈니스를 기반으로 하는 "Huawei Octopus"는 클라우드 교육과 클라우드 병렬 시뮬레이션을 통합하고 풍부한 시뮬레이션 시나리오와 높은 동시 인스턴스 처리 기능을 갖추고 있으며 매일 200,000개 이상의 시뮬레이션 시나리오 인스턴스를 제공합니다. 가상 테스트 마일리지는 1천만 킬로미터를 초과할 수 있으며 3,000개 인스턴스의 동시 테스트를 지원합니다.
Baidu: Apollo 플랫폼
Baidu Apollo는 개발자에게 클라우드 기반 의사결정 시스템 시뮬레이션 서비스를 제공합니다. Baidu Cloud 및 Microsoft Azure에 클라우드 시뮬레이션 플랫폼을 구축하여 하루 수백만 킬로미터의 가상 운영 기능을 쉽게 생성합니다. 시나리오 라이브러리 측면에서 Baidu Apollo 플랫폼에서 제공하는 시나리오 라이브러리는 규제 표준 시나리오, 위험한 작업 조건 시나리오 및 성능 평가 시나리오를 포함하며 총 약 200가지 유형으로 구성됩니다.
Apollo는 Unity와 협력하여 Unity 엔진 기반의 가상 시뮬레이션 환경을 개발했으며, 엔드투엔드 자율주행 시뮬레이션 시스템인 증강현실 자율주행 시뮬레이션 시스템인 AADS를 제안했습니다. 교통 흐름을 시뮬레이션하고 현실적인 시뮬레이션 장면을 만듭니다.
Baidu는 자율 주행 데이터 세트 ApolloScape를 오픈했습니다. 이제 픽셀별 의미론적 분할 주석이 포함된 수십만 프레임의 고해상도 이미지 데이터를 포함하여 픽셀 수준 의미론적으로 주석이 달린 147,000프레임의 이미지를 공개했습니다. 지각 분류 및 도로 네트워크 데이터 및 해당 픽셀 별 의미 주석. ”
Tencent: TAD Sim
Tencent는 2018년 시뮬레이션 플랫폼 TAD Sim을 출시했습니다. 이는 전문 게임 엔진, 산업 등급 차량 역학 모델, 가상 현실 통합 교통을 결합하여 만든 가상 현실 온라인 시뮬레이션 플랫폼입니다. 차세대 통합 자율주행 시뮬레이션 플랫폼은 장면의 기하학적 복원, 논리적 복원, 물리적 복원을 실현할 수 있습니다.
TAD Sim은 장면 기반 클라우드 시뮬레이션 및 가상 도시 기반 클라우드 시뮬레이션을 포함한 클라우드 운영도 지원합니다. 시뮬레이션은 가속화된 시뮬레이션과 높은 동시성 시뮬레이션을 모두 달성하여 현실 세계의 다양한 시나리오와 주행 가능성을 충족함으로써 기업의 자율 주행 테스트 프로세스를 가속화합니다. 시나리오 라이브러리에는 1,000만 개 이상의 용량을 갖춘 1,000개 이상의 시나리오 유형이 있습니다.
이러한 거대 기술 기업은 기존 렌더링 기능, 클라우드 컴퓨팅 및 기타 장점을 기반으로 자율 주행 시뮬레이션 프로세스에 더 많은 관심을 기울이고 있습니다. 장면 라이브러리에 더 많은 관심을 기울이기 위해 우리는 자율 주행 시스템의 테스트 및 검증을 진행하기 위해 더욱 의식적으로 업스트림 및 다운스트림 링크를 공개했습니다
.2. 시뮬레이션의 문제점
(1) 시뮬레이션 소프트웨어: 시뮬레이션과 자동차를 모두 이해해야 합니다
자율주행 개발 체인의 링크로서 시뮬레이션은 다른 링크와 유기적으로 통합되어야 합니다.
기존 시뮬레이션 소프트웨어는 일부 분야에서는 매우 전문적이지만 업스트림 및 다운스트림 링크와 연결할 때 매우 번거롭습니다.
예를 들어, 도로 테스트 중에 발견된 문제의 경우 개발자는 나중에 회귀 테스트를 수행할 수 있도록 해당 장면을 시뮬레이션 장면 라이브러리에 포함하기를 원합니다. 그러나 많은 기존 소프트웨어는 이 기능을 지원하지 않으며 오직 수행만 할 수 있습니다. 장면 라이브러리를 수동으로 구축하려면 장면 라이브러리를 수동으로 구축하는 것의 효율성이 매우 낮으며 하루에 몇 개를 구축할 수도 없습니다.
예를 들어 일부 기존 시뮬레이션 소프트웨어는 WINDOWS 환경에서만 실행할 수 있지만, 이제 자율주행 개발을 위한 환경은 Ubuntu 환경에 있습니다.
또 다른 예로 기존 시뮬레이션 소프트웨어의 클라우드 병렬 시뮬레이션 기능은 클라우드 시뮬레이션과 호환되지 않으며 일부는 최신 버전의 클라우드 시뮬레이션과만 호환됩니다. 업계 전문가에 따르면 기존 시뮬레이션 소프트웨어는 라이선스를 판매하기 때문에 여러 대의 컴퓨터에 소프트웨어를 설치하려면 라이선스가 여러 개 필요하다고 한다.
클라우드 병렬 시뮬레이션이 점점 더 중요한 역할을 함에 따라 서비스 요금을 기반으로 하는 SaaS 모델은 분명히 더 고객 친화적이며 전통적인 시뮬레이션 소프트웨어 라이선스 판매 모델도 이에 따라 조정되어야 합니다.
클라우드에서의 병렬 시뮬레이션은 의심할 여지 없이 자율주행 개발의 효율성을 크게 향상시킬 수 있습니다. Huawei, Baidu, Tencent와 같은 거대 기업의 시뮬레이션 플랫폼은 스타트업인 51WORLD의 제품도 병렬을 지원합니다. 시뮬레이션하고 프라이빗 클라우드와 퍼블릭 클라우드에 배포할 수 있습니다.
시뮬레이션 소프트웨어를 제공하는 것 외에도 생태 거대 기업은 시뮬레이션 플랫폼과 기타 도구 체인을 풀 스택 솔루션에 통합합니다. 예를 들어 'Huawei Octopus'는 자율주행 분야의 DevOps를 실현하기 위해 클라우드에서 원스톱 시뮬레이션 및 평가 도구 체인을 제공합니다. 코드 웨어하우스 액세스부터 버전 관리, 시뮬레이션 및 평가까지 자동화된 폐쇄 루프를 실현할 수 있습니다. . 이렇게 하면 자동차 회사가 시작하기가 더 쉬워지고 적응 비용이 낮아질 것입니다.
그러나 이들 거대 기업들도 큰 도전에 직면해 있습니다. 즉, 차량 동역학 모델 및 자동차 핵심 부품과 같은 하드웨어의 충분한 축적이 부족하기 때문에 이들 기업은 자체 연구 또는 협력을 통해 관련 역량을 보완해야 합니다. . 예를 들어 Baidu는 자체 차량 동역학 모델을 개발하기로 결정했고 Apollo 5.0에는 VTD 및 내장된 CarMaker의 차량 동역학 모델과 전략적으로 협력하는 "Huawei Octopus" 시뮬레이션 시스템이 추가되었습니다. 화웨이와 사이무 테크놀로지(Saimu Technology)도 협력 관계를 구축하기 시작해 자율주행 기대 기능 안전(SOTIF) 분야에서도 노력을 전개할 것으로 알려졌다.
(2) 시나리오 라이브러리가 핵심입니다
데이터 기반 개발 링크에서 데이터 기반은 "질문 바다 전술"에 해당합니다. 시험관이 할 수 있는 일은 점점 더 어려운 질문을 하는 것뿐입니다. . 시스템 개발 링크에서 시나리오 라이브러리는 심사관이 소프트웨어의 품질을 평가하기 위해 제시하는 시험 문제와 동일하므로, 시나리오 라이브러리의 양과 품질이 시스템의 수준을 직접적으로 결정합니다.
장면 라이브러리는 일반적으로 여러 소스에서 제공됩니다. 시중에 판매되는 대부분의 타사 장면 라이브러리는 표준 규정 및 전문가 경험 데이터를 기반으로 구축되었습니다. 예를 들어, 주차 기능을 만들려면 도로 테스트에서 발견된 인수 이벤트나 코너 케이스에 대해 더 노동 집약적인 주차 장면을 디자인해야 하며, 이는 역으로 장면 라이브러리를 생성해야 합니다. 이전에 잘못된 질문을 바탕으로 자신만의 ""를 구성하는 후보자입니다.
이러한 장면 라이브러리 외에도 자동차 회사에서도 도로 테스트에서 접하는 코너 케이스를 통해 자체 장면 라이브러리를 계속해서 '확장'하고 있습니다. 이러한 요구에 부응하여 "Huawei Octopus"와 같은 일부 시뮬레이션 소프트웨어는 "원 클릭으로 실제 드라이브 테스트 시나리오를 시뮬레이션 시나리오로 변환"하는 기능을 제공하며 이를 기반으로 편집하고 일반화할 수 있습니다. 예를 들어, 날씨 환경, 주변 환경 변경, 미러링 및 기타 수단을 통해 더 많은 시나리오를 일반화할 수 있으며, Huawei는 가상 및 실제 하이브리드 시뮬레이션 기능도 제공합니다.
가상-실제 하이브리드 시뮬레이션은 클라우드에서 테스트 시나리오를 구축한 후 이를 차량에 탑재해 주행하는 방식으로, 특히 차량은 개방된 도로나 폐쇄된 현장에서 다양한 가상 장면을 시뮬레이션할 수 있습니다. 횡단보도, 비자동차 CUT-IN 및 기타 위험한 시나리오를 통해 실제 차량의 자율 주행 알고리즘과 차량 동역학 성능을 테스트할 수 있어 테스트 효율성이 향상됩니다.
(3) 시뮬레이션 평가
시뮬레이션 평가는 전체 시뮬레이션 시스템에서 가장 쉽게 간과되는 부분일 수 있습니다.
시뮬레이션 평가에는 크게 두 가지 측면이 있는데, 한편으로는 현재 테스트를 통과했다고 판단할 수 있는지 여부를 의미하고, 다른 한편으로는 실제 차량 테스트의 일관성과 반복성을 의미합니다. 현재 테스트에 해당하는 동일한 장면.
시스템이 장면 라이브러리 시험을 성공적으로 통과할 수 있는지 평가하는 방법은 무엇입니까? 시험 문제가 게시되었고 응시자가 이를 완료했습니다. 그렇다면 자율 주행 소프트웨어 시스템에 대한 KPI를 "표시"하고 설정하는 방법은 무엇입니까?
시험관이라면 어떤 평가기준이 떠오르시나요?
목표점에 도달하셨나요? 무사히 운행되었나요(충돌 없음)? 빨간불에 달렸나요? 빠르게 가속하거나 감속하고 있습니까? 등.
생각만 해도 평가 기준이 많네요. 더욱 문제는 시나리오마다 알고리즘 검사에 중점을 두는 부분이 다르고, 평가 기준도 다를 가능성이 매우 높다는 것입니다. 장면 라이브러리에는 이상한 것들이 가득하고 평가 기준도 당연히 다양합니다.
그러나 일반적으로 평가 기준은 표준 매칭(표준 규정을 충족하는지 여부), 주행 안전성(충분히 안전한지 여부), 주행 효율성(목적지에 효율적으로 도달할 수 있는지 여부)의 다섯 가지 주요 측면으로 나눌 수 있습니다. , 연비), 주행 편의성(충분히 편안한지 여부), 주행 인텔리전스(충분히 스마트한지 여부)입니다.
업계 전문가에 따르면 각 장면 라이브러리는 구축 시 합격 또는 실패에 대한 "맞춤형" 평가 기준을 가지고 있어야 합니다. 이때 시뮬레이션 소프트웨어는 다양한 시뮬레이션 평가 기준을 제공해야 하며, 제공되지 않으면 특정 측면을 평가할 수 없음을 의미합니다.
따라서 각 시뮬레이션 소프트웨어는 안전성, 편안함, 신뢰성, 인간-컴퓨터 상호 작용 경험, 유용성, 규정 준수, 에너지소비, 교통효율성 등 200여개 평가지표를 공개하였습니다. Huawei 내부자에 따르면, 시뮬레이션 평가를 보다 유연하게 만들기 위해 향후 고객이 시뮬레이션 평가 표준을 맞춤화하고 개발하는 것도 지원할 예정입니다.
3. 시뮬레이션 소프트웨어의 표준화 개발 추세
위에서 언급한 시뮬레이션 플랫폼과 업스트림 및 다운스트림 툴 체인의 통합은 수직적 통합이라는 업계 내에서도 비교적 큰 문제점이 있습니다. 다른 시뮬레이션 소프트웨어 간의 통합 형식은 호환되지 않습니다.
동일한 자동차 회사는 여러 시뮬레이션 소프트웨어를 동시에 사용하는 경우가 많습니다. 예를 들어 각 시뮬레이션 소프트웨어는 일련의 시나리오 사례를 축적하지만 시나리오 사례 라이브러리는 서로 다른 시뮬레이션 소프트웨어에서 생성됩니다. , 형식이 서로 호환되지 않으며 파일을 보편적으로 사용할 수 없습니다.
이것은 실제로 전체 산업이 충분히 표준화되지 않았기 때문입니다.
이 문제를 해결하기 위해 ASAM에서 출시한 시뮬레이션 분야 표준 OpenX는 많은 자동차 회사, 공급업체 및 과학 연구 기관에서 인정을 받았습니다. 현재 대부분의 시뮬레이션 소프트웨어는 OpenX 표준을 지원하기 시작했습니다. ASAM은 더 많은 표준을 개발하고 있습니다.
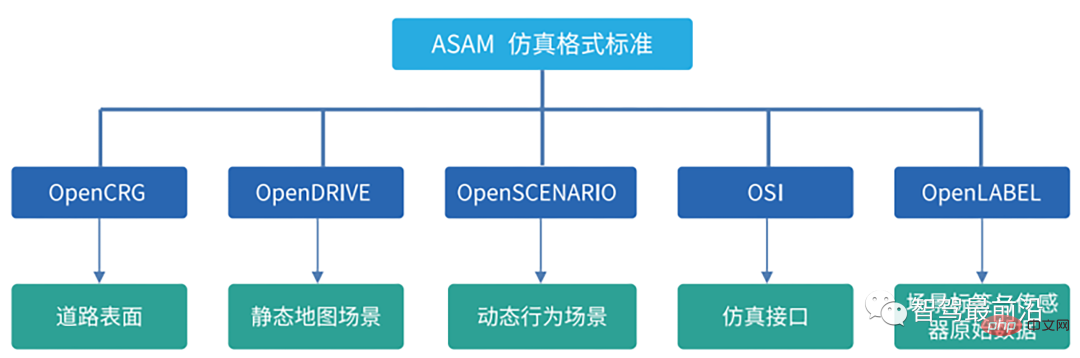
ASAM 시뮬레이션 형식 표준(2020년 중국 자율주행 시뮬레이션 Blue Book에서 인용)
현재 OpenX 형식을 지원하지 않는 일부 시뮬레이션 소프트웨어가 아직 남아 있습니다. 업계 관계자에 따르면 "일부 시뮬레이션 소프트웨어 회사는 모든 링크를 자체적으로 제어하여 대체할 수 없게 만들고 고객을 연결하고 싶어도 변경할 수 없습니다. 일부 시뮬레이션 테스트 회사의 경우에도 마찬가지입니다. 과거에는 이것이 대기업이 사용하는 일반적인 방법이지만 자동차 회사에서는 실제로 수용할 수 없는 일이며 표준화를 달성하고 마이그레이션 비용을 줄이기를 희망합니다.” OpenX를 지원하지 않는 사람들의 수는 일반적으로 표준화가 매우 중요합니다. 표준화가 발전하면 가까운 미래에는 서로 다른 소프트웨어 간의 파일 호환성이 더 이상 문제가 되지 않을 것이라고 믿습니다.
4. 고정밀 지도는 툴 체인에서 없어서는 안 될 부분입니다
현재 많은 L2+ 자율 주행 기능이 고정밀 지도를 사용하고 있으며, 특히 L4 자율 주행의 경우 고정밀 지도가 중요한 기반 시설이 될 것이라는 사실은 모두가 알고 있습니다. 자율주행 시뮬레이션을 위해서는 고정밀 지도도 빼놓을 수 없는 중요한 연결고리입니다. 위에서 언급한 드라이브 테스트 장면을 시뮬레이션 장면으로 변환하고, 가상-현실 하이브리드 시뮬레이션 등 많은 시뮬레이션 장면을 구축하는 것은 고정밀 지도 지원과 불가분의 관계입니다.
(1) 규정 준수 문제
하지만 HD맵에도 가장 먼저 해결해야 할 문제는 규정 준수 문제입니다.
현재 A급 측량 및 매핑 자격을 갖춘 국내 회사는 20개가 넘습니다. Huawei, Alibaba, Tencent, Baidu, Xiaomi 및 Didi는 모두 이 자격을 갖추고 있습니다. 자동차 회사 중에는 SAIC China Haiting, Geely Yikatong이 있습니다. , 최근 인수한 Zhitu Technology의 Xpeng Motors도 A급 측량 및 매핑 자격을 보유하고 있습니다.
NavInfo의 CEO인 Bai Xinping은 언론에 다음과 같이 말한 적이 있습니다. "고정밀 지도는 자격을 갖춘 회사가 참여해야 합니다. 자격은 규정 준수 및 안전과 관련이 있습니다. 초기에는 이 분야에 대한 국가의 감독이 너무 부족했습니다. 엄격하고 앞으로도 더욱 엄격해질 것입니다.”
이러한 맥락에서 대량 생산 솔루션의 규정 준수 문제를 해결하기 위해 자동차 회사는 협력할 자격을 갖춘 지도 서비스 제공업체를 선택하게 됩니다. 지도 서비스 제공업체는 안전 및 규정 준수 요구 사항을 충족하는 고성능, 신뢰성 높은 인프라를 구축해야 하며, 이를 통해 대규모 지도 데이터의 안전한 저장을 효과적으로 지원할 수 있습니다. 또한 드라이브 테스트 데이터의 감도를 낮추기 위한 강력한 컴퓨팅 리소스와 지능형 알고리즘도 갖추고 있어야 합니다. 규정 준수 애플리케이션 처리와 동시에 시스템은 제3자 파트너가 지능형 운전 개발 및 지도 데이터 애플리케이션 서비스를 수행하도록 효과적으로 지원해야 합니다.
(2) 복잡한 장면의 정확도 문제
현재 주요 지도 서비스 제공업체가 전국의 주요 고속도로 및 고속도로를 커버하고 있지만 지도 품질은 여전히 낙관적이지 않으며 누락되거나 잘못된 표시가 여전히 존재합니다. .
업계 관계자는 Jiuzhang Zhijia에게 선도적인 지도 서비스 제공업체의 고속 구간에 대한 고정밀 지도 범위가 완전하지 않으며 특히 고속도로, 유료소 및 휴게소에 출입하는 램프의 경우 편차가 있을 것이라고 말했습니다. 또는 상황에 대한 불완전한 적용.
모 자동차 회사의 고정밀 지도 담당자와 통화하던 중 담당자가 Jiuzhang Zhijia에게 L4 Robotaxi를 테스트할 때 주요 장면이 도시 도로에 있었고 이 부분이 지도 서비스는 커버 가능 공급업체가 적고 품질과 업데이트 빈도도 높지 않아 고정밀 지도를 직접 수집하고 제작해야 합니다.
따라서 고정밀 지도는 고속도로의 커버리지를 강화할 뿐만 아니라 도시 통근 시나리오의 커버리지 문제를 해결하고 복잡한 도로 상황의 정확성을 향상시키는 데 중점을 두어야 합니다. 그래야만 자율주행을 위한 고정밀 지도의 지원 역할을 향상시키는 동시에 복잡한 도시 현장에서 자율주행 시뮬레이션 및 테스트를 효과적으로 지원할 수 있습니다.
(3) 동적 업데이트 문제
HD 지도도 동적 업데이트 문제를 해결해야 합니다. 그렇지 않으면 데이터가 적시성을 잃으면 지능형 운전을 효과적으로 지원할 수 없을 뿐만 아니라, 안전상의 위험을 초래합니다.
현재 많은 업계 관계자들은 지도 크라우드소싱 업데이트 모델이 업데이트 적시성 및 수집 비용 측면에서 더 많은 이점을 갖고 있기 때문에 향후 주류 기술 모델이 될 것이라고 믿고 있습니다. 제공업체 또한 관련 기술 테스트를 지속적으로 탐색하고 실시하고 있습니다. 크라우드소싱 지도 업데이트는 다양한 데이터 소스, 균일하지 않은 품질, 일관되지 않은 수집 요소 표준, 클라우드-장치-차량 링크 상호 운용성 등 많은 기술적 문제에 직면할 뿐만 아니라 국가 법률 및 규정의 제약에도 직면합니다. 민감한 지리정보 필터링, 지도 데이터 암호화, 개인정보 유출 등으로 인해 관련 국가 부서의 전반적인 계획이 추가로 필요합니다.
사실 고정밀 지도의 동적 업데이트를 해결하는 것은 여러 리소스와 데이터의 집계와 통합은 물론 클라우드와 엣지 디바이스의 협업이 필요한 체계적인 프로젝트가 될 것입니다. 지도 서비스 제공업체, 지능형 커넥티드 카, 다양한 교통 시스템을 통해 참가자, 도로 인프라, 엣지 컴퓨팅 및 클라우드 협업은 물론 교통 빅데이터, 도로 건설 및 유지 관리 데이터, 도로 운영 회사 및 기타 당사자가 협력하여 고정밀 지도를 제공하고 고정밀 지도 데이터의 신선도를 높입니다.
저자의 생각으로는 고정밀 지도의 제작과 업데이트는 통일된 고정밀 지도 요소 표준이 형성될 수 있다면 여러 자원을 조율하고 조율할 수 있으며, 반복 작업을 줄일 수 있고, 국가 지도를 공동으로 그릴 수 있으며 이는 산업 비용을 절감하고 산업 효율성과 데이터 신뢰성을 향상하며 데이터 보안 위험을 줄이는 데 큰 도움이 될 것입니다.
04 클라우드로 갈지 말지 그것이 문제로다
1. 클라우드로 가면 장점이 많아요
데이터 기반 시스템 개발에서는 대용량 데이터, 모델 교육, 병렬 시뮬레이션 테스트 등 모두 막대한 양의 IT 리소스가 필요합니다.
업계 관계자는 "나인 챕터 스마트 드라이빙"에서 자율주행 시스템을 개발할 때 갑자기 모델 훈련 등의 컴퓨팅 성능 요구사항이 발생하고, 신규 구매 과정이 발생하게 된다고 말했습니다. 컴퓨팅 성능은 서버의 경우 승인 프로세스에 몇 개월이 걸릴 수 있으며 이는 개발 진행에 큰 영향을 미칩니다. 이러한 수요에 대응하기 위해 모 자동차 회사의 지능형주행개발 자회사는 신규 사옥을 계획할 때 사옥 1층 전체를 컴퓨터실로 계획한 것으로 파악된다.
스토리지든 교육이든 실제로 이러한 갑작스러운 요구에 대처할 수 있는 아주 좋은 방법이 있는데, 바로 클라우드로 전환하는 것입니다.
클라우드로 전환하면 많은 이점이 있습니다. 예를 들어 클라우드 개발 환경은 호환성이 좋고, 신속한 탄력적 확장이 개발 효율성을 향상할 수 있으며, 비용 및 데이터 보안 측면에서도 이점이 있습니다.
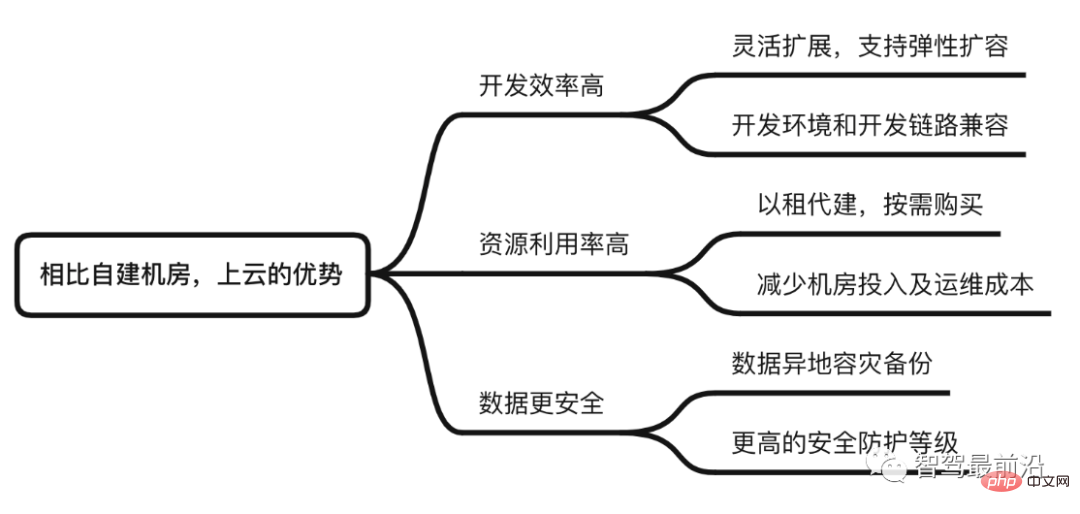
자체 구축한 전산실에 비해 클라우드 이전의 이점
신종 코로나바이러스라는 특수한 상황에서 디지털 혁신은 기업이 생존하는 방식이 되었습니다. 전염병에 대응하여 기업이 실시간 온라인 비즈니스를 실현하고 서비스 시나리오를 오프라인에서 온라인으로 이동하려면 디지털 혁신을 거쳐 클라우드 회의, 클라우드 조달, 클라우드 판매, 클라우드를 통해 직원, 고객, 서비스 및 프로세스를 통합해야 합니다. 서명 등 완전 온라인.
디지털 발전 정도가 높을수록 기업 발전에 더 유리합니다. IDC 연구 데이터에 따르면 디지털화 지수가 높은 기업의 생존 가능성은 평균 수준보다 5배 이상 높은 것으로 나타났습니다.
업계에서는 일반적으로 디지털 혁신을 달성하려면 클라우드로 전환하는 것이 유일한 방법, 심지어 첫 번째 단계라고 믿습니다. "디지털화가 먼저 클라우드로 전환되어야 합니다."
클라우드로의 전환은 자율주행 데이터를 위한 폐쇄 루프 개발 링크를 구축하는 데 필요한 옵션입니다. Corner Case에 있는 "Huawei Octopus"의 최적화된 링크를 예로 들면, 자동차 측에서 수동 인수가 발생한 후 "Huawei Octopus"가 자동으로 실행되고 클라우드에서 온라인으로 피드백이 발생하여 원인을 추적하고 진단합니다. 확인된 경우 차량 자체의 책임(자체 시스템 문제)인 경우 데이터 수집 서비스는 인수 전후의 유효한 데이터를 클라우드에 업로드하고 데이터 처리 프로세스에 들어갑니다.
인식 링크를 최적화해야 하는 경우 데이터를 수집, 정리 및 라벨링합니다. 처리 후 계획 제어 모듈을 최적화해야 하는 경우 인식 모듈이 클라우드에서 교육됩니다. 한 번의 클릭으로 시뮬레이션 시나리오 라이브러리로 변환됩니다. 최적화된 알고리즘 시스템은 병렬 시뮬레이션 테스트와 회귀 테스트를 거쳐야 합니다. 시뮬레이션 평가도 통과하면 OTA 푸시 서비스가 클라우드에서 시작되고 차량 측 시스템이 이러한 방식으로 업그레이드됩니다. 완료됩니다.
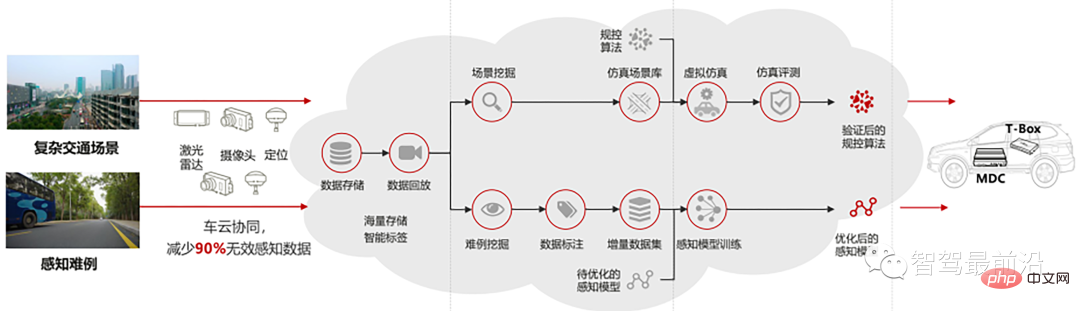
"Huawei Octopus" 데이터 폐쇄 루프 링크
클라우드로의 연결은 자율 주행이 개발 및 테스트 단계에서 상용화로 이동할 수 있는 유일한 방법입니다.
현재 대부분의 자동차 회사는 여전히 개발 및 테스트에 주력하고 있으며 테스트 차량 수는 몇 대에서 수십 대에 이릅니다. 그러나 테스트 차량 수가 늘어나면 이후에는 수만 대에 이를 것입니다. 대량 생산이 이루어지면 매일 생성되는 데이터의 양도 수백/수천TB에서 10PB로 증가하고, 훈련 및 병렬 시뮬레이션에 필요한 GPU 컴퓨팅 성능도 수십에서 수천으로 확장됩니다. 점점 더 긴급해질 것입니다.
클라우드 전환의 이점을 이해한 후, 클라우드 컴퓨팅의 분류를 살펴보겠습니다.
클라우드는 일반적으로 퍼블릭 클라우드, 프라이빗 클라우드, 하이브리드 클라우드의 세 가지 범주로 나뉩니다.
퍼블릭 클라우드는 사용자가 소유하지 않은 인프라를 기반으로 하며 여러 테넌트가 사용할 수 있도록 클라우드에 할당할 수 있습니다. 가장 일반적으로 언급되는 클라우드는 Amazon AWS, Alibaba Cloud 등이 있습니다. , 화웨이 클라우드, 텐센트 클라우드 등
프라이빗 클라우드는 일반적으로 단일 고객을 위해 생성되며, 액세스 권한은 해당 고객에게만 부여됩니다. 고객은 이를 자신의 컴퓨터실에서 구축하거나(프라이빗 배포) 클라우드에서 호스팅 서비스를 제공하도록 선택할 수 있습니다. 서비스 제공업체의 컴퓨터실(호스팅 프라이빗 클라우드).
하이브리드 클라우드는 일반적으로 프라이빗 클라우드와 퍼블릭 클라우드의 결합으로 볼 수도 있고, 서로 다른 서비스 제공자를 활용하는 퍼블릭 클라우드로 볼 수도 있습니다.
일반적으로 퍼블릭 클라우드는 빠르게 확장할 수 있고 수요가 많거나 변동이 심한 워크로드에 더 적합하다고 생각됩니다. 그러나 프라이빗 클라우드를 확장하려면 새로운 하드웨어와 리소스를 구입하거나 임대해야 하며 이는 훨씬 더 복잡합니다. 자율주행 개발 과정에서 차량 수가 늘어나면 스토리지 수요도 기하급수적으로 늘어나는 반면, 개발 과정에서 갑자기 대용량 컴퓨팅 성능(클라우드 트레이닝이나 병렬 시뮬레이션)이 요구되는 경우가 많다. 등) 이러한 수요에 직면하면 퍼블릭 클라우드가 더 적합할 것입니다.
클라우드 컴퓨팅의 발전 추세로 볼 때, 퍼블릭 클라우드 시장의 비중은 해마다 증가하고 있는 반면, 프라이빗 클라우드의 비중은 해마다 감소하고 있습니다. iiMedia Consulting 데이터에 따르면 2020년 중국 클라우드 컴퓨팅 시장에서 2019년에는 퍼블릭 클라우드 규모가 프라이빗 클라우드를 넘어 최초의 주요 시장이 되었습니다.
2. 데이터 보안 우려
'나인챕터 스마트 드라이빙'으로 소통하다 보니, 퍼블릭 클라우드의 장점을 인지한 자동차 회사 관계자 역시 "내 데이터는 퍼블릭 클라우드에 보관돼 있다. 다른 사람이 유용하게 될까요?”라고 자동차회사 직원이 말했다.
바로 이러한 우려 때문에 많은 자동차 회사가 자체 서버를 구축하거나 프라이빗 클라우드를 선택하게 됩니다. 일부 자동차 회사는 하이브리드 클라우드를 선택합니다. 즉, 회사는 데이터와 관련되지 않은 일부 서비스만 운영하게 됩니다. 보안 및 데이터 개인 정보 보호를 퍼블릭 클라우드에서 수행하고 프라이빗 클라우드에서 기타 서비스를 실행합니다.
일부 주요 자동차 회사와 신차 제조사들이 퍼블릭 클라우드를 선택하기는 하지만 퍼블릭 클라우드 서비스 제공자를 선택할 때 그들과 지분 관계에 있는 서비스 제공자를 선택합니다. 데이터 보안에 대해 걱정할 필요가 없습니다." 그들은 이렇게 설명합니다.
신뢰의 기본은 상호 이해와 친밀감입니다. 불신은 클라우드 컴퓨팅과 같은 이해 부족으로 인해 발생하는 경우가 많습니다.
클라우드로 마이그레이션하는 기업의 경우 클라우드 데이터를 적절하게 보호하는 것이 가장 중요하고 기본적인 보안 요구 사항입니다. 이는 클라우드 서비스 제공업체가 고객의 신뢰를 얻기 위한 "생명선"이기도 합니다.
"Alibaba Economy Cloud Native Practice"의 소개에 따르면 데이터 보안에 대한 고객의 요구 사항은 정보 보안 "CIA"의 세 가지 기본 요소인 Confidentiality(기밀성)와 Integrity(무결성) 및 가용성으로 요약할 수 있습니다. .
기밀성은 특히 합법적인(또는 예상되는) 사용자만 보호된 데이터에 액세스할 수 있음을 의미합니다. 주요 구현 방법에는 데이터 액세스 제어, 데이터 유출 방지, 데이터 암호화 및 키 관리가 포함됩니다. (또는 예상되는) 사용자는 주로 액세스 제어를 통해 데이터를 수정할 수 있으며 동시에 데이터 전송 및 저장 중 검증 알고리즘을 통해 사용자 데이터의 무결성을 보장할 수 있습니다. 클라우드 환경의 전반적인 보안 기능, 재해 복구 기능, 신뢰성은 물론 클라우드 내 다양한 관련 시스템(스토리지 시스템, 네트워크 액세스, 신원 인증 메커니즘, 권한 확인 메커니즘 등)의 정상적인 작동 보장에 대해 설명합니다.
이 세 가지 측면 중에서 기밀성(Confidentiality)을 보장하기 위한 가장 중요한 기술적 수단은 데이터 암호화이며, 이는 전체 링크 데이터 암호화 기능입니다.
"풀 링크 암호화"는 엔드투엔드 데이터 암호화 보호 기능을 의미하며, 데이터의 전체 라이프사이클을 암호화하는 것을 의미합니다. 주로 오프클라우드에서 온클라우드까지의 전송 프로세스를 의미합니다. 클라우드 및 온클라우드 단위 간, 애플리케이션 런타임 중 데이터의 계산 프로세스(처리/교환), 데이터가 최종적으로 디스크에 유지될 때까지 저장 프로세스 중 암호화 기능.
일반적으로 데이터 암호화 작업 프로세스는 국제 및 국내에서 인정된 보안 알고리즘을 통해 일반 텍스트 데이터를 계산하여 데이터 암호문을 얻는 것입니다. 암호화 작업에서 안전하게 보호되고 관리되는 키는 암호화 보호를 위한 충분하고 필요한 조건입니다. 즉, 키를 제어하면 전체 암호화 작업의 주도권도 제어됩니다. 사용자는 자신의 마스터 키를 사용자 리소스로 가져오고 모든 통화는 사용자의 승인을 받아야 하기 때문에 사용자는 암호화된 데이터 사용에 대한 완전한 독립적 제어 및 주도권을 갖습니다. 동시에 사용자 리소스에 대한 모든 호출은 로그 감사에 완전히 표시되므로 암호화된 데이터의 클라우드 사용에 대한 투명성이 더 잘 보장됩니다.

데이터 보안의 라이프 사이클은 알리바바 이코노미의 클라우드 네이티브 관행에서 발췌
업계에서도 많은 분들이 '나인 챕터 스마트 드라이빙'에서 소통할 때 한 가지 포인트를 언급하셨습니다. 보증 클라우드 서비스 공급자의 내부 직원이나 운영 및 유지 관리 담당자가 자신의 권한을 사용하여 내 데이터를 비밀리에 사용합니까?
여기에는 실제로 규정 준수가 포함되며, 이는 내부 프로세스를 통해 보장되어야 하며, 이 내부 프로세스는 권위 있는 제3자의 규정 준수 인증을 통해 확인되는 경우가 많습니다. 그 중 전 세계적으로 가장 권위 있고 널리 받아들여지고 적용되는 정보 보안 시스템 인증은 ISO27001입니다. 각 주요 클라우드 서비스 제공업체가 통과한 규정 준수 인증은 공식 웹사이트에서도 확인할 수 있습니다.
외부 규정 준수 인증도 내부적으로 구현해야 합니다. 화웨이를 예로 들면, 개발부터 관리까지 안전 레드라인에 대한 일련의 규정이 있으며 이를 위반하면 처벌이 매우 엄격하고 강등되는 경우가 많습니다. , 처벌 등 경고, 심지어 퇴학 등 화웨이 내부자는 규정 준수 문제에 관해 이야기하면서 미국이 화웨이를 제재하기 시작한 이후 전 세계에서 화웨이의 '비준수'에 대한 '확실한' 증거를 찾기 위해 최선을 다했지만 그 이상이었다고 농담하기도 했습니다. 발견된 지 2년이 지났는데, 이는 화웨이의 스마트카 클라우드 서비스가 ASPICE L2 제3자 인증과 폭스바겐 그룹 APSICE(KGAS)를 통과한 적도 있다는 점을 측면에서 입증한 것입니다. PN(잠재적 공급업체) 검토는 또한 화웨이의 스마트 카 클라우드 서비스의 R&D 품질과 개발 프로세스가 주요 국제 자동차 제조업체로부터 인정을 받았음을 보여줍니다.
아마도 비즈니스 로직의 관점에서 이해하는 것이 더 쉬울 것입니다. 클라우드 서비스 제공업체의 경우 고객 데이터 보안은 생명입니다. 문제가 발생하면 이러한 신뢰는 더 이상 존재하지 않으며 비즈니스 기반도 상실됩니다. 그리고 클라우드 컴퓨팅 자체의 아키텍처 관점에서 보면 클라우드의 데이터도 더 안전할 것입니다. 한편으로는 클라우드 서비스 제공업체가 외부 재해 복구를 위해 데이터 백업을 수행합니다(예: 자연 재해로 인한 데이터 손실을 방지하기 위해). 화재), 반면에 보안 보호 수준도 더 높아질 것입니다(더 많은 보안 인재, 더 많은 보안 조치 마련).
클라우드로의 전환은 자동차 회사의 일반적인 추세이지만, 자동차 회사가 퍼블릭 클라우드를 이해하고 수용하는 데는 과정이 필요합니다.
퍼블릭 클라우드 마케터는 '스마트 드라이빙 9장'에서 상대적으로 자율주행차 회사와 인터넷 배경을 가진 외국 자동차 회사들이 클라우드로 전환할 의향이 더 높다고 말했습니다. 데이터에 대한 걱정이 더 커질 것입니다.
클라우드 컴퓨팅 산업의 발전 추세 관점에서 볼 때, 업계마다 클라우드에 대한 이해가 다르며, 클라우드 컴퓨팅 사용률도 다릅니다. Frost & Sullivan 데이터에 따르면 중국의 클라우드 컴퓨팅 주요 사용자는 서로 다릅니다. 현재 클라우드 노출에 중점을 두고 있으며, 인터넷, 금융, 정부 등 초기 분야 중 인터넷 관련 산업이 약 3분의 1을 차지하고 있으며, 현재 전통 분야에서 클라우드 컴퓨팅 애플리케이션 수준은 약 29%를 차지하고 있습니다. 운송, 물류, 제조업 등 산업이 빠르게 발전하고 있습니다. 앞으로 자동차 회사들이 클라우드 컴퓨팅에 대한 이해를 심화하고 디지털 변혁 과정을 가속화할수록 클라우드에 대한 수용도는 더욱 높아질 것이라고 믿습니다. 가까운 미래에는 클라우드에 액세스할 수 없는 것이 더 이상 문제가 되지 않을 수도 있습니다.
05 툴체인 개발 동향
1. 효율성: 엔드투엔드
현재 자율주행 시스템을 개발하는 자동차 회사의 가장 큰 문제점은 툴체인과 데이터 아일랜드의 상호 분할입니다.
전통적인 툴 체인 회사와 스타트업은 툴 체인의 특정 링크에 집중하는 경우가 많습니다. 예를 들어 시뮬레이션을 하는 사람은 시뮬레이션을 하고, 주석을 하는 사람은 자동차 회사에서 사용할 때 각 부품이 다음과 같이 사용됩니다. 전체 개발 도구 체인의 일부입니다. 하나의 링크가 연속적으로 사용됩니다. 중간에 있는 특정 링크에만 집중하면 필연적으로 다른 링크와 "잘못 정렬"됩니다.
게다가 현재 툴 체인은 업계 표준이 부족하고 회사마다 매우 다르기 때문에 고객은 적응하는 데 많은 시간을 투자해야 합니다. 따라서 자동차 회사는 하나의 공급업체가 툴 체인의 여러 링크를 연결하여 비용을 절감할 수 있기를 바랍니다. 자신의 적응 비용. 이러한 기회를 포착한 거대 기술 기업들은 "툴 체인 생태학"을 가지고 시장에 진입하여 풀 스택 툴 체인을 제공했습니다.
다음은 기술 거대 기업의 생태에 대한 목록입니다.
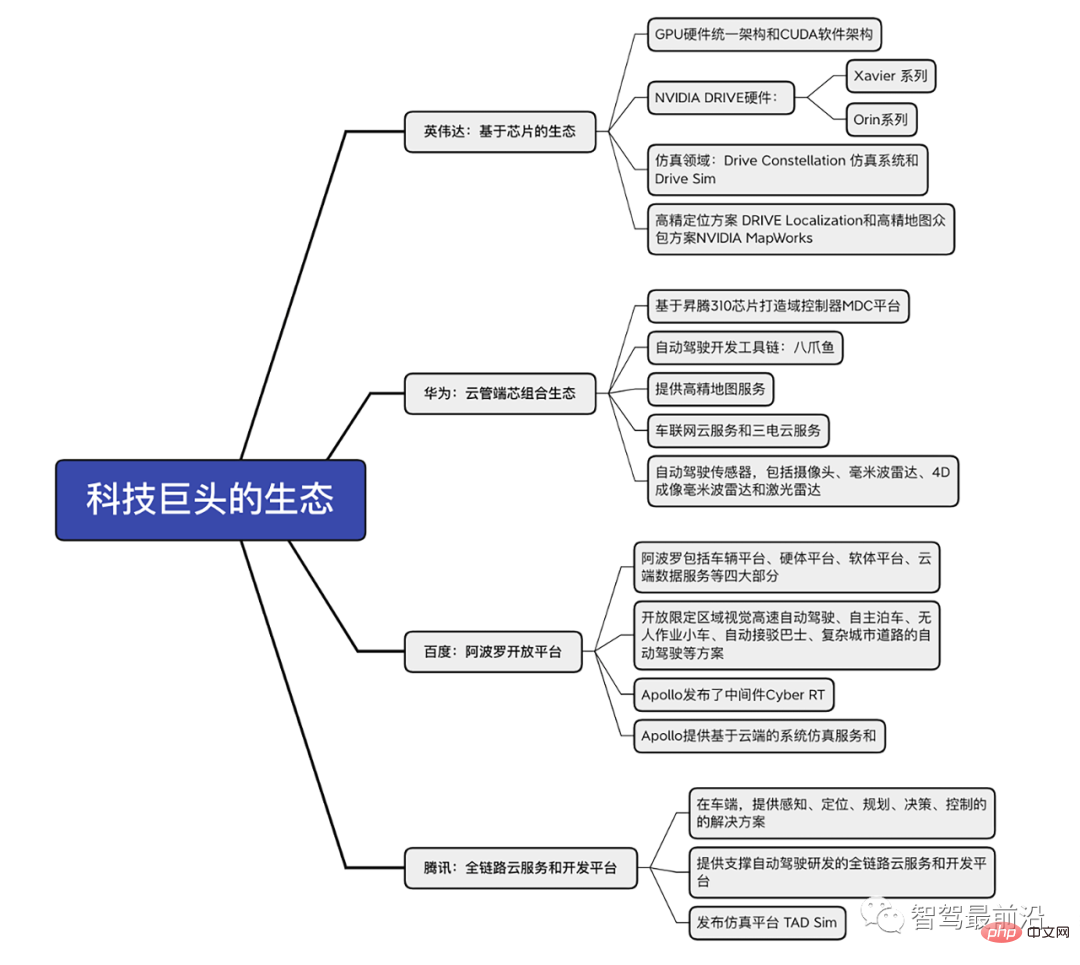
(1) NVIDIA: 칩 기반 생태
칩 거대 기업 NVIDIA는 자동차 주변에 통합 아키텍처와 GPU 하드웨어를 구축했습니다. CUDA 소프트웨어 아키텍처를 사용하면 개발자는 매우 간단한 지침으로 복잡한 딥 러닝 모델을 호출할 수 있습니다. '나인 챕터 스마트 드라이빙'은 업계 전문가들과의 교류를 통해 엔비디아를 선택한 중요한 이유가 엔비디아가 안정적인 툴체인과 풍부한 소프트웨어 생태계를 갖추고 있다는 점을 알게 됐다. 성숙한 도구 체인의 장점은 문제가 발생한 경우 신속하게 문제를 찾을 수 있다는 것입니다.
2017년 NVIDIA는 자체 개발한 소프트웨어 아키텍처인 Drive AV 및 Drive IX를 탑재한 자율 주행 플랫폼 NVIDIA DRIVE를 출시했습니다. NVIDIA DRIVE 플랫폼을 위한 차량 내 지능형 주행 컨트롤러. 현재 자비에(Xavier) 시리즈가 시판되고 있으며, 최신 오린(Orin)은 2022년 양산 예정으로 ISO 26262 ASIL-D 기능안전 규격을 충족할 수 있다.
시뮬레이션 분야에서 NVIDIA는 2018년에 Drive Constellation 시뮬레이션 시스템과 Drive Sim을 출시했습니다.
2019년 NVIDIA는 고정밀 위치 측정 솔루션인 DRIVE Localization도 시연했습니다. 또한 NVIDIA는 고정밀 지도 크라우드소싱 솔루션인 NVIDIA MapWorks도 계획하고 있습니다.
현재 NVIDIA는 Mercedes-Benz, Audi, Toyota, Volvo, Bosch, Continental 및 기타 회사와 자율 주행 R&D 협력을 구축했습니다.
(2) Huawei: 클라우드, 튜브, 터미널 및 코어 조합의 개방형 생태계
Huawei는 "자동차를 만들지 않고 ICT 기술에 집중하며 자동차 회사가 좋은 자동차를 만들 수 있도록 돕는다"는 전략을 고수합니다. 칩, 클라우드, 소프트웨어, 하드웨어 측면에서는 툴체인, 고정밀 지도 등 개방형 생태계를 만들기 위해 노력하고 있습니다.
Huawei 지능형 운전 컴퓨팅 플랫폼 MDC는 Huawei가 자체 개발한 CPU, AI 칩 및 기타 제어 칩을 통합하고 기본 소프트웨어 및 하드웨어의 튜닝을 통합하여 업계 최고의 전체 성능을 달성합니다. 또한 Huawei MDC는 완전한 테스트 플랫폼과 도구 체인을 갖추고 있어 MDC 개발을 위한 풀스택 솔루션을 제공합니다. MDC 플랫폼 하드웨어는 지능형 주행 운영체제 AOS/VOS 및 MDC Core를 실행합니다. 즉, MDC는 자동차급 소프트웨어와 하드웨어를 보유하고 있어 자동차 회사가 양산 모델을 선택하기가 더 쉽다.
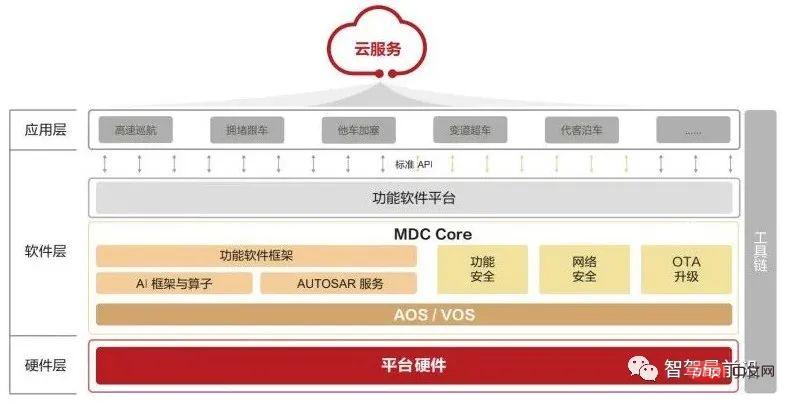
MDC 전체 아키텍처 다이어그램 - Huawei MDC 백서
자율 주행 개발 툴 체인 분야에서 Huawei는 자율 주행 클라우드 서비스를 시작했습니다. 또한 화웨이는 차량 인터넷 클라우드 서비스(지능형 운전, 스마트 조종석 데이터 수집 및 저장), 3전원 클라우드 서비스(3가지 전원 시스템의 클라우드 관리 및 제어), 고정밀 지도 클라우드 서비스도 출시했습니다. 이 외에도 화웨이는 자율주행 센서를 배치하기 위해 소프트 조치와 하드 조치를 모두 시행했습니다.
(3) Baidu: Apollo 개방형 플랫폼
2017년 Baidu는 자동차 산업 및 자율주행 플랫폼의 파트너에게 개방적이고 완전하며 안전한 소프트웨어를 제공하기 위해 자율주행 개방형 플랫폼 Apollo를 출시했습니다. Apollo 플랫폼은 차량 플랫폼, 하드웨어 플랫폼, 소프트웨어 플랫폼 및 클라우드 데이터 서비스의 네 부분을 포함하는 완전한 소프트웨어, 하드웨어 및 서비스 시스템 세트입니다. 이는 파트너가 차량과 하드웨어 시스템을 결합하여 자체 자율 주행을 신속하게 구축하는 데 도움이 됩니다. 체계.
아폴로는 제한된 지역의 시각적 고속 자율주행, 자율주차(Valet Parking), 무인운행차량(MicroCar), 자동셔틀버스(MiniBus), 복잡한 도심 자율주행 등의 솔루션을 선보이며 업그레이드를 이어왔습니다. , 자체 Robotaxi 차량을 구축하고 "Carrot Run"이라는 브랜드로 다양한 장소에서 테스트 작업을 시작했습니다.
아폴로가 자율주행 시스템의 안전성을 향상시키기 위해 미들웨어 사이버 RT를 출시했다는 점은 언급할 만하다.
Apollo 생태계 개발자는 클라우드 기반 시스템 시뮬레이션 서비스와 증강현실 자율주행 시뮬레이션 시스템 AADS를 제공합니다.
2021년 초, 바이두와 지리는 합작회사인 Jidu Automobile을 설립하고 자동차 제조 종료를 발표했습니다. Robin Li는 "Jidu Automobile의 설립 목적은 Baidu의 자율주행 기술과 스마트 조종석 기술을 홍보하는 것입니다"라고 공개적으로 밝혔습니다. 마켓으로."
(4) Tencent: 풀 링크 클라우드 서비스 및 개발 플랫폼
Tencent는 자율주행 클라우드 생태계를 위한 개발 플랫폼도 마련하고 있습니다. Tencent는 자동차나 센서를 만들지 않고 소프트웨어와 서비스만 제공합니다.
자동차 측면에서 Tencent는 클라우드 스토리지 및 컴퓨팅 성능 지원을 기반으로 클라우드에서 인식, 위치 지정, 계획, 의사 결정 및 제어를 포함하는 솔루션을 제공합니다. Tencent는 데이터 수집 관리, 샘플 라벨링, 및 알고리즘 훈련 및 평가, 진단 및 디버깅, 클라우드 시뮬레이션(시뮬레이션 플랫폼 TAD Sim), 실제 차량 피드백 폐쇄 루프 전체 프로세스 클라우드 서비스, 자율 주행 연구 개발을 지원하는 풀 링크 클라우드 서비스 및 개발 플랫폼을 제공합니다.

Tencent의 자율 주행 비즈니스 레이아웃 및 포지셔닝(Tencent Su Kuifeng의 온라인 공개 공유에서 인용)
풀 스택 툴 체인은 효율성이 눈에 띄게 향상되었으며, 특히 파이프라인을 빠르게 구축하는 능력이 향상되었습니다. . '화웨이 옥토퍼스' 관계자는 "각 회사의 개별 툴체인 솔루션을 사용하면 링크 자체를 디버깅하는 데 몇 달이 걸릴 수 있다"고 말했다. 그러나 "화웨이 옥토퍼스"는 이미 전체 링크에 대해 이 작업을 완료했으며, 또한 Huawei는 고객에게 일련의 참조 알고리즘을 제공하여 이를 기반으로 디버깅하고 최적화할 수 있으므로 가장 빠르게 실행하는 데 며칠 밖에 걸리지 않습니다. 전체 프로세스가 매우 효율적입니다.
2. 개방형: 각 모듈의 분리
많은 자동차 회사가 자체 개발 툴 체인 개발을 선택하는 이유는 한편으로는 효율성을 고려하고 다른 한편으로는 "보안"을 고려하기 때문입니다. 자동차 회사도 생태계에서 과거의 통제 위치를 계속 유지하기를 원하며 본능적으로 "고착"될 수 있는 잠재적인 위험을 싫어하므로 종종 도구 체인의 소규모 회사와 협력하는 것을 좋아합니다.
개방성 측면에서 보면 기술 대기업마다 전략이 다릅니다. 특정 자동차 제조업체의 자율주행 개발자에 따르면 특정 기업의 자율주행 개발 플랫폼의 생태계는 분리되지 않습니다. 고객을 깊이 결속시키기 위해서는 "모든 것을 수용하되 단일 모듈의 사용은 수용하지 말라"고 해야 합니다. 화웨이는 각 모듈을 분리하는 또 다른 길을 선택했습니다.
Huawei 내부자에 따르면 'Huawei Octopus'의 툴 체인은 데이터, 교육, 시뮬레이션, 감독의 네 부분으로 나누어져 있습니다. 이 네 부분은 완전히 개방적이고 분리되어 있으며 고객이 교체할 수 있습니다. 언제든지.
3. 협력 방식이 더 유연해졌습니다
자동차 회사의 경우 기존 기술 보유량이 대량 생산 계획을 뒷받침할 수 없다면 자체 연구 전략과 충돌할 수 있습니다.
'나인챕터 스마트 드라이빙'과 소통할 때 자동차 회사 개발자들이 내놓은 대답은 놀라울 정도로 일관됐다. 한편, 양산차는 블랙박스 구매이기 때문에 외부에서 조달한 ADAS 솔루션을 탑재한다. 공급업체들은 어떠한 자료도 공개하지 않고 있지만, 완성차의 경쟁력과 판매를 위해 자동차 회사들은 이런 '즉시 타협'을 용인할 수 밖에 없는 반면, 자동차 회사들도 많은 인력과 물적 자원을 투자해 왔다. 자체 개발한 L2+ 솔루션, "자체 연구 계획이 성숙해지면 점차적으로 대체되어 버스에 탑재될 것입니다." 그래서 자체 연구는 "시와 거리"가 되었습니다.
자동차 회사 고객의 이러한 요구를 고려하여 'Huawei Octopus'는 고객에게 다양한 협력 옵션을 제공합니다. Huawei 내부자는 다음과 같이 소개했습니다. "첫 번째 옵션에서는 Huawei가 완전한 대량 생산 솔루션을 개발하고 제공하는 역할을 담당합니다. 옵션인 경우 Huawei는 개발을 담당하며 고객은 세 번째 옵션에 대해 일부 매개변수를 자유롭게 구성할 수 있습니다. Huawei는 자율 주행 개발 툴 체인을 제공하고 고객은 자체 개발을 수행하며 Huawei는 전체 애프터 개발 세트를 제공합니다. Consulting services.”
06 요약
이 글은 자율주행 개발 툴체인 관점에서 업계 현황과 개발 동향을 분석합니다.
현재 자율주행 개발 툴체인 산업의 발전은 심각한 비표준화 및 정보 사일로로 인해 아직 미숙합니다. 선도적인 자율주행 팀은 개발 효율성을 위해 "자체 바퀴를 만들어야" 합니다.
그러나 많은 새로운 툴체인 플레이어가 등장하면서 전체 산업은 성숙을 향해 발전하고 있으며 이후의 툴체인은 점차 개방화, 표준화, 표준화될 것입니다. 특히 화웨이, 엔비디아 등 거대 기업들이 생태계를 가지고 게임에 뛰어들어 전체 개발 체인을 개방하고 업계에 사례를 제시하며 산업 발전을 촉진하고 있다고 화웨이 내부자는 말했다. 운전산업." , 계속해서 앞으로 달려가세요."
자율주행을 클라우드로 옮기는 것이 대세이며, 높은 수준의 자율주행을 통해 저장, 컴퓨팅 성능 및 요구사항에 더해 기술 연구 단계에서 대규모 상용 단계로 점차 진화하고 있습니다. 또한 성능, 보안 및 확장성에 대한 엄격한 요구 사항을 충족하는 인프라 서비스도 필요합니다.
전통적인 데이터 센터 구축 모델은 자율주행 개발 회사에 막대한 건설 비용과 운영 및 유지 관리 압력을 가져올 것입니다. 퍼블릭 클라우드는 다중 컴퓨팅 파워를 지원함으로써 모델 훈련, 병렬 시뮬레이션 등 자율주행 개발 과정에서 대규모 인프라 자원에 대한 극한의 컴퓨팅 파워, 안전성, 신뢰성, 탄력성, 유연성 등의 비즈니스 요구를 충족할 수 있다. 반복을 통한 자율주행 알고리즘. 따라서 현재 대부분의 기업이 퍼블릭 클라우드 접근 방식에 대해 의구심을 갖고 있지만, 전체 자율주행 산업의 급속한 발전과 퍼블릭 클라우드에 대한 이해가 지속적으로 심화됨에 따라 이 서비스 모델은 더욱 활성화될 것이라고 믿습니다.
위 내용은 자율주행 개발 툴체인의 현황과 향후 동향에 대한 심도 있는 논의의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7542
7542
 15
1381
52
83
11
55
19
21
86
15
1381
52
83
11
55
19
21
86

 자율주행 분야에서 Gaussian Splatting이 인기를 끌면서 NeRF가 폐기되기 시작한 이유는 무엇입니까?
Jan 17, 2024 pm 02:57 PM
자율주행 분야에서 Gaussian Splatting이 인기를 끌면서 NeRF가 폐기되기 시작한 이유는 무엇입니까?
Jan 17, 2024 pm 02:57 PM
위에 작성됨 및 저자의 개인적인 이해 3DGS(3차원 가우스플래팅)는 최근 몇 년간 명시적 방사선장 및 컴퓨터 그래픽 분야에서 등장한 혁신적인 기술입니다. 이 혁신적인 방법은 수백만 개의 3D 가우스를 사용하는 것이 특징이며, 이는 주로 암시적 좌표 기반 모델을 사용하여 공간 좌표를 픽셀 값에 매핑하는 NeRF(Neural Radiation Field) 방법과 매우 다릅니다. 명시적인 장면 표현과 미분 가능한 렌더링 알고리즘을 갖춘 3DGS는 실시간 렌더링 기능을 보장할 뿐만 아니라 전례 없는 수준의 제어 및 장면 편집 기능을 제공합니다. 이는 3DGS를 차세대 3D 재구성 및 표현을 위한 잠재적인 게임 체인저로 자리매김합니다. 이를 위해 우리는 처음으로 3DGS 분야의 최신 개발 및 관심사에 대한 체계적인 개요를 제공합니다.
 자율주행 시나리오에서 롱테일 문제를 해결하는 방법은 무엇입니까?
Jun 02, 2024 pm 02:44 PM
자율주행 시나리오에서 롱테일 문제를 해결하는 방법은 무엇입니까?
Jun 02, 2024 pm 02:44 PM
어제 인터뷰 도중 롱테일 관련 질문을 해본 적이 있느냐는 질문을 받아서 간략하게 요약해볼까 생각했습니다. 자율주행의 롱테일 문제는 자율주행차의 엣지 케이스, 즉 발생 확률이 낮은 가능한 시나리오를 말한다. 인지된 롱테일 문제는 현재 단일 차량 지능형 자율주행차의 운영 설계 영역을 제한하는 주요 이유 중 하나입니다. 자율주행의 기본 아키텍처와 대부분의 기술적인 문제는 해결되었으며, 나머지 5%의 롱테일 문제는 점차 자율주행 발전을 제한하는 핵심이 되었습니다. 이러한 문제에는 다양한 단편적인 시나리오, 극단적인 상황, 예측할 수 없는 인간 행동이 포함됩니다. 자율 주행에서 엣지 시나리오의 "롱테일"은 자율주행차(AV)의 엣지 케이스를 의미하며 발생 확률이 낮은 가능한 시나리오입니다. 이런 희귀한 사건
 카메라 또는 LiDAR를 선택하시겠습니까? 강력한 3D 객체 감지 달성에 대한 최근 검토
Jan 26, 2024 am 11:18 AM
카메라 또는 LiDAR를 선택하시겠습니까? 강력한 3D 객체 감지 달성에 대한 최근 검토
Jan 26, 2024 am 11:18 AM
0. 전면 작성&& 자율주행 시스템은 다양한 센서(예: 카메라, 라이더, 레이더 등)를 사용하여 주변 환경을 인식하고 알고리즘과 모델을 사용하는 고급 인식, 의사결정 및 제어 기술에 의존한다는 개인적인 이해 실시간 분석과 의사결정을 위해 이를 통해 차량은 도로 표지판을 인식하고, 다른 차량을 감지 및 추적하며, 보행자 행동을 예측하는 등 복잡한 교통 환경에 안전하게 작동하고 적응할 수 있게 되므로 현재 널리 주목받고 있으며 미래 교통의 중요한 발전 분야로 간주됩니다. . 하나. 하지만 자율주행을 어렵게 만드는 것은 자동차가 주변에서 일어나는 일을 어떻게 이해할 수 있는지 알아내는 것입니다. 이를 위해서는 자율주행 시스템의 3차원 객체 감지 알고리즘이 주변 환경의 객체의 위치를 포함하여 정확하게 인지하고 묘사할 수 있어야 하며,
 좌표계 변환을 실제로 마스터하셨나요? 자율주행에 필수불가결한 멀티센서 이슈
Oct 12, 2023 am 11:21 AM
좌표계 변환을 실제로 마스터하셨나요? 자율주행에 필수불가결한 멀티센서 이슈
Oct 12, 2023 am 11:21 AM
첫 번째 파일럿 및 주요 기사에서는 주로 자율 주행 기술에서 일반적으로 사용되는 여러 좌표계를 소개하고 이들 간의 상관 관계 및 변환을 완료하고 최종적으로 통합 환경 모델을 구축하는 방법을 소개합니다. 여기서 초점은 차량에서 카메라 강체로의 변환(외부 매개변수), 카메라에서 이미지로의 변환(내부 매개변수), 이미지에서 픽셀 단위로의 변환을 이해하는 것입니다. 3D에서 2D로의 변환에는 해당 왜곡, 변환 등이 포함됩니다. 요점: 차량 좌표계와 카메라 본체 좌표계를 다시 작성해야 합니다. 평면 좌표계와 픽셀 좌표계 난이도: 이미지 평면에서 왜곡 제거와 왜곡 추가를 모두 고려해야 합니다. 2. 소개 좌표계에는 픽셀 평면 좌표계(u, v), 이미지 좌표계(x, y), 카메라 좌표계(), 월드 좌표계() 등 총 4가지 비전 시스템이 있습니다. 각 좌표계 사이에는 관계가 있으며,
 자율주행과 궤도예측에 관한 글은 이 글이면 충분합니다!
Feb 28, 2024 pm 07:20 PM
자율주행과 궤도예측에 관한 글은 이 글이면 충분합니다!
Feb 28, 2024 pm 07:20 PM
자율주행 궤적 예측은 차량의 주행 과정에서 발생하는 다양한 데이터를 분석하여 차량의 향후 주행 궤적을 예측하는 것을 의미합니다. 자율주행의 핵심 모듈인 궤도 예측의 품질은 후속 계획 제어에 매우 중요합니다. 궤적 예측 작업은 풍부한 기술 스택을 보유하고 있으며 자율 주행 동적/정적 인식, 고정밀 지도, 차선, 신경망 아키텍처(CNN&GNN&Transformer) 기술 등에 대한 익숙함이 필요합니다. 시작하기가 매우 어렵습니다! 많은 팬들은 가능한 한 빨리 궤도 예측을 시작하여 함정을 피하기를 희망합니다. 오늘은 궤도 예측을 위한 몇 가지 일반적인 문제와 입문 학습 방법을 살펴보겠습니다. 관련 지식 입문 1. 미리보기 논문이 순서대로 되어 있나요? A: 먼저 설문조사를 보세요, p
 SIMPL: 자율 주행을 위한 간단하고 효율적인 다중 에이전트 동작 예측 벤치마크
Feb 20, 2024 am 11:48 AM
SIMPL: 자율 주행을 위한 간단하고 효율적인 다중 에이전트 동작 예측 벤치마크
Feb 20, 2024 am 11:48 AM
원제목: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving 논문 링크: https://arxiv.org/pdf/2402.02519.pdf 코드 링크: https://github.com/HKUST-Aerial-Robotics/SIMPL 저자 단위: Hong Kong University of Science 및 기술 DJI 논문 아이디어: 이 논문은 자율주행차를 위한 간단하고 효율적인 모션 예측 기준선(SIMPL)을 제안합니다. 기존 에이전트 센트와 비교
 nuScenes의 최신 SOTA | SparseAD: Sparse 쿼리는 효율적인 엔드투엔드 자율주행을 지원합니다!
Apr 17, 2024 pm 06:22 PM
nuScenes의 최신 SOTA | SparseAD: Sparse 쿼리는 효율적인 엔드투엔드 자율주행을 지원합니다!
Apr 17, 2024 pm 06:22 PM
전면 및 시작점 작성 엔드 투 엔드 패러다임은 통합 프레임워크를 사용하여 자율 주행 시스템에서 멀티 태스킹을 달성합니다. 이 패러다임의 단순성과 명확성에도 불구하고 하위 작업에 대한 엔드투엔드 자율 주행 방법의 성능은 여전히 단일 작업 방법보다 훨씬 뒤떨어져 있습니다. 동시에 이전 엔드투엔드 방법에서 널리 사용된 조밀한 조감도(BEV) 기능으로 인해 더 많은 양식이나 작업으로 확장하기가 어렵습니다. 여기서는 희소 검색 중심의 엔드 투 엔드 자율 주행 패러다임(SparseAD)이 제안됩니다. 여기서 희소 검색은 밀집된 BEV 표현 없이 공간, 시간 및 작업을 포함한 전체 운전 시나리오를 완전히 나타냅니다. 특히 통합 스파스 아키텍처는 탐지, 추적, 온라인 매핑을 포함한 작업 인식을 위해 설계되었습니다. 게다가 무겁다.
 엔드투엔드(End-to-End)와 차세대 자율주행 시스템, 그리고 엔드투엔드 자율주행에 대한 몇 가지 오해에 대해 이야기해볼까요?
Apr 15, 2024 pm 04:13 PM
엔드투엔드(End-to-End)와 차세대 자율주행 시스템, 그리고 엔드투엔드 자율주행에 대한 몇 가지 오해에 대해 이야기해볼까요?
Apr 15, 2024 pm 04:13 PM
지난 달에는 몇 가지 잘 알려진 이유로 업계의 다양한 교사 및 급우들과 매우 집중적인 교류를 가졌습니다. 교환에서 피할 수 없는 주제는 자연스럽게 엔드투엔드와 인기 있는 Tesla FSDV12입니다. 저는 이 기회를 빌어 여러분의 참고와 토론을 위해 지금 이 순간 제 생각과 의견을 정리하고 싶습니다. End-to-End 자율주행 시스템을 어떻게 정의하고, End-to-End 해결을 위해 어떤 문제가 예상되나요? 가장 전통적인 정의에 따르면, 엔드 투 엔드 시스템은 센서로부터 원시 정보를 입력하고 작업과 관련된 변수를 직접 출력하는 시스템을 의미합니다. 예를 들어 이미지 인식에서 CNN은 기존의 특징 추출 + 분류기 방식에 비해 end-to-end 방식으로 호출할 수 있습니다. 자율주행 작업에서는 다양한 센서(카메라/LiDAR)로부터 데이터를 입력받아
