

ADAS 시스템 센서를 어떻게 배열해야 하는지에 대한 기사

이 기사에서는 먼저 첨단 운전 보조 시스템에서 센서 배치 전략의 중요성을 소개하고, 전방 스마트 카메라, 전방 및 측면 밀리미터파 레이더(77GHz/22GHz), 초음파를 포함한 첨단 운전 보조 시스템 센서 유형을 제안합니다. 레이더 서라운드 뷰 카메라뿐만 아니라 각 센서의 성능 특성에 대한 간략한 설명이 제공됩니다. 그런 다음 현재 대량 생산 공급업체의 솔루션을 예로 들어 감지 거리, 감지 범위 및 외부 레이아웃 환경에 대한 요구 사항을 포함하여 다양한 센서 성능 매개 변수를 자세히 소개합니다. 본 논문에서는 차량에만 다양한 센서를 사용하여 달성할 수 있는 기능과 다양한 운전 보조 수준 및 다양한 기능 조합을 갖춘 다양한 센서의 융합 전략을 소개합니다. 마지막으로 차량에 다양한 센서를 합리적으로 설치하는 방법을 소개합니다. 필요한 성능 요구 사항과 감지 범위 중복성을 기반으로 구체적인 구현 계획을 제안하고 해당 레이아웃 요구 사항을 자세히 분석하고 설명합니다.
Abbreviation
기술의 발전과 자율주행 기술의 급속한 발전으로 인해 현재 첨단 운전 보조 시스템이나 보조 운전 시스템을 탑재한 자동차가 점점 많아지고 있으며, 이 자동차는 SAE J3016TM 자율주행 레벨에서 레벨 5 자율주행으로 분류됩니다. 자율주행에는 다양한 센서(초음파 레이더, 밀리미터파 레이더, 스마트 카메라, 고화질/표준화질 카메라, 라이더 등)가 사용된다. , 자율주행 인식 시스템의 밀리미터파 레이더 기능 소개. Yuan Xiuzhen은 자율주행차 센서 기술 산업을 분석하고 LiDAR, 카메라, 초음파 감지 등과 같은 중요한 하드웨어 애플리케이션에 대해 자세히 설명했습니다. 자율주행을 위한 개발 밸류체인에서 센서 부품 개발은 주로 국내외 자동차 부품 공급업체에 집중되고, 차량 기능 통합은 OEM이 완료한다.
Zhang Yanyong 등은 멀티모달 융합을 기반으로 한 자율주행 인식 융합 알고리즘을 제안했습니다. 많은 엔지니어들이 개발 노력을 알고리즘 개발과 시스템 설계에 집중하는 경향이 있지만, 사용되는 센서 하드웨어와 소프트웨어 전략이 문제가 되는 경우가 많습니다. 성공적으로, 일부 OEM 모델에서는 효과가 매우 좋지만 다른 OEM에서 사용할 경우 효과는 평균이거나 심지어 부정적입니다. 자율주행 연구개발에서는 모든 연계성을 고려하는 것이 필수적이기 때문이다. 폐쇄 루프 개발로서 좋은 알고리즘은 센서 프런트 엔드 감지의 정확한 감지를 기반으로 합니다. 다양한 유형의 하드웨어 센서는 센서 감지 성능에 대한 요구 사항이 다릅니다. 감지 성능에 영향을 미치는 특히 중요한 점은 센서의 배치 및 배치입니다. . 방법. 본 글에서는 자율주행에 사용되는 센서의 감지 성능 특성을 기반으로 레이아웃 방법을 간략하게 소개한다.
첨단운전보조시스템 센서 소개
첨단운전보조시스템(ADAS)은 센서를 이용하여 자동차가 주행하는 동안 주변 환경을 실시간으로 감지하고, 데이터를 수집하고, 융합을 감지하고, 감지된 데이터를 분석하여 의사결정을 내리며, 최종적으로 차량을 제어하고 운전자에게 조기 경고를 제공합니다.
카메라는 물체의 색상, 모양, 재질 등 풍부한 환경 정보를 얻을 수 있으며, 2D 컴퓨터 비전은 신호등 감지, 물체 분류 등을 위한 많은 고급 알고리즘이 발전했습니다. 밀리미터파 레이더는 정확한 거리 정보를 얻을 수 있고, 강력한 침투력을 가지며, 날씨 및 환경 변화의 영향에 저항할 수 있고, 장거리 감지 및 감지를 실현할 수 있습니다.
현재 양산되는 자율주행차에는 4가지 유형의 센서가 있으며, 총 22가지가 있습니다(표 1).
전방 보기 스마트 카메라: 일반적으로 사용되는 단일, 이중 및 삼중 카메라는 주로 중거리 및 장거리 장면에서 명확한 차선, 교통 표지판, 장애물 및 보행자를 식별할 수 있지만 매우 민감합니다. 빛이나 날씨와 같은 조건에 따라 복잡한 알고리즘 지원이 필요하며 프로세서에 대한 요구 사항이 상대적으로 높습니다.
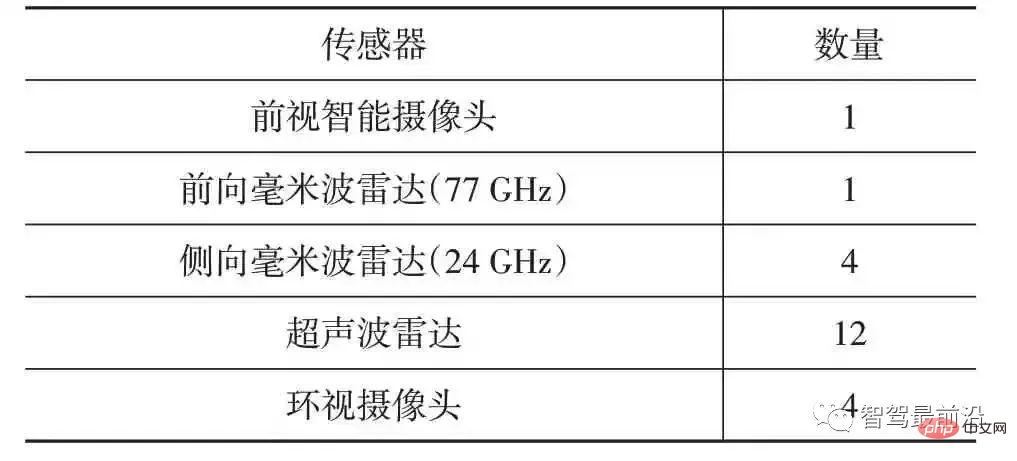
표 1 첨단운전지원시스템 센서 분류
밀리미터파 레이더: 주로 단거리 및 중거리 측정용 24GHz 레이더와 장거리 측정용 77GHz 레이더의 두 가지 유형이 있습니다. 밀리미터파 레이더는 피사계 심도 및 속도 정보를 효과적으로 추출하고 장애물을 식별할 수 있으며 안개, 연기, 먼지를 관통하는 특정 능력을 갖추고 있습니다. 그러나 복잡한 환경 장애물의 경우 밀리미터파는 음파 위치 파악, 음파에 의존하기 때문입니다. 그 결과, 탐지 실패율과 오류율이 상대적으로 높습니다.
초음파 레이더: 주로 단거리 시나리오에서 초음파를 보내고 반사된 초음파 신호를 수신하여 감지 결과를 컨트롤러에 보내는 데 사용됩니다. 초음파는 에너지 소모가 느리고 침투력이 강하며 거리 측정 방법이 간단하고 비용이 저렴하다. 그러나 자동차가 고속으로 주행하는 경우 초음파 거리 측정으로는 자동차 간 거리의 실시간 변화를 따라잡을 수 없고 오차도 크다. 초음파는 산란 각도가 크고 지향성이 좋지 않습니다. 멀리 있는 대상을 측정할 때 에코 신호가 상대적으로 약해 측정 정확도에 영향을 미칩니다. 그러나 단거리 측정에서는 초음파 거리 측정 센서가 큰 장점을 가지고 있습니다.
서라운드 뷰 카메라: 근거리 장면에서 주로 사용되며 장애물을 식별할 수 있지만 빛, 날씨 등 외부 조건에 매우 민감합니다. 기술이 성숙하고 가격이 저렴합니다. 지속적인 기술 발전과 발전으로 카메라의 픽셀 수는 초기 30만 픽셀에서 현재 100만 픽셀까지 점차 증가하고 있으며 향후 3년 내에 200만 픽셀 카메라가 대중화될 것입니다.
센서는 기능적 구성 조합을 실현합니다
첨단 운전 보조 시스템의 서로 다른 센서의 조합은 서로 다른 기능을 구현할 수 있습니다. 위에서 소개한 22개의 센서는 모두 차량에 설치되며 다음과 같이 ADASL1/L2/L3을 구현할 수 있습니다. 세부적인 하위 기능을 소개합니다.
전방 스마트 카메라와 전방 밀리미터파 레이더
전방 스마트 카메라는 AEB-C(Automatic Emergency Braking-Car), LDW(Lane Departure Warning), LKA(Lane Keep Assist), TSR(교통 표지 인식)을 통해 L1 수준의 운전 지원을 달성합니다. 실제 도로 상황 감지(예: 차선, 터널, 경사로, 속도 제한 등)는 정확하지만 거리 감지는 정확하지 않습니다. 대표적인 성능 매개변수는 표 2에 나와 있습니다.
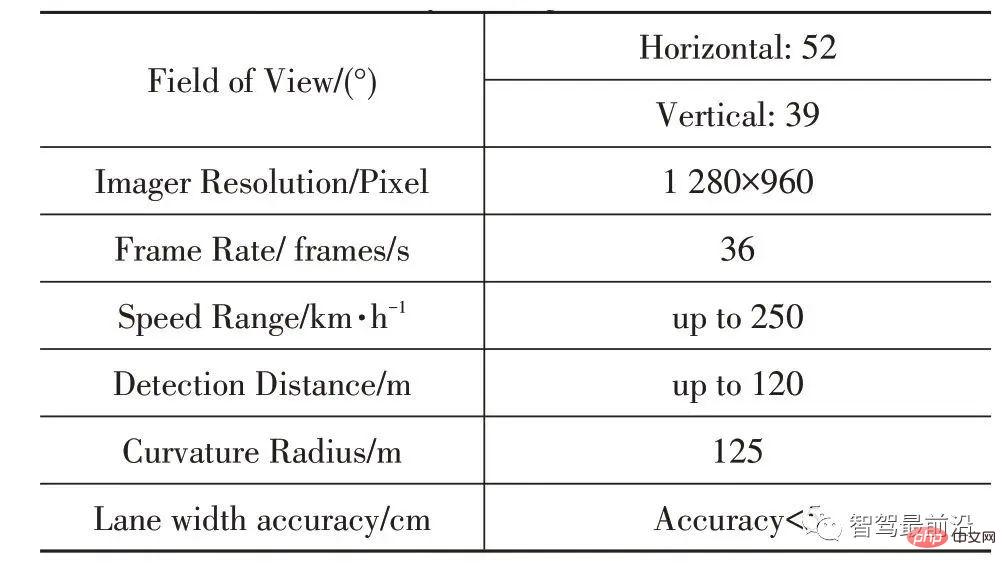
표 2 Mobileye EYEQ3의 일부 성능 매개변수
전방 밀리미터파 레이더(77GHz)는 ACC(Adaptive Cruise), AEB-C(Automatic Emergency Braking - Vehicle), FCW(전진)를 구현합니다. 충돌 경고), L1 레벨 운전 지원을 달성합니다. 거리 감지는 정확하지만 실제 상황(예: 차선, 터널, 경사로, 속도 제한 등)을 예측할 수는 없습니다. 대표적인 성능 매개변수는 표 3에 나와 있습니다.
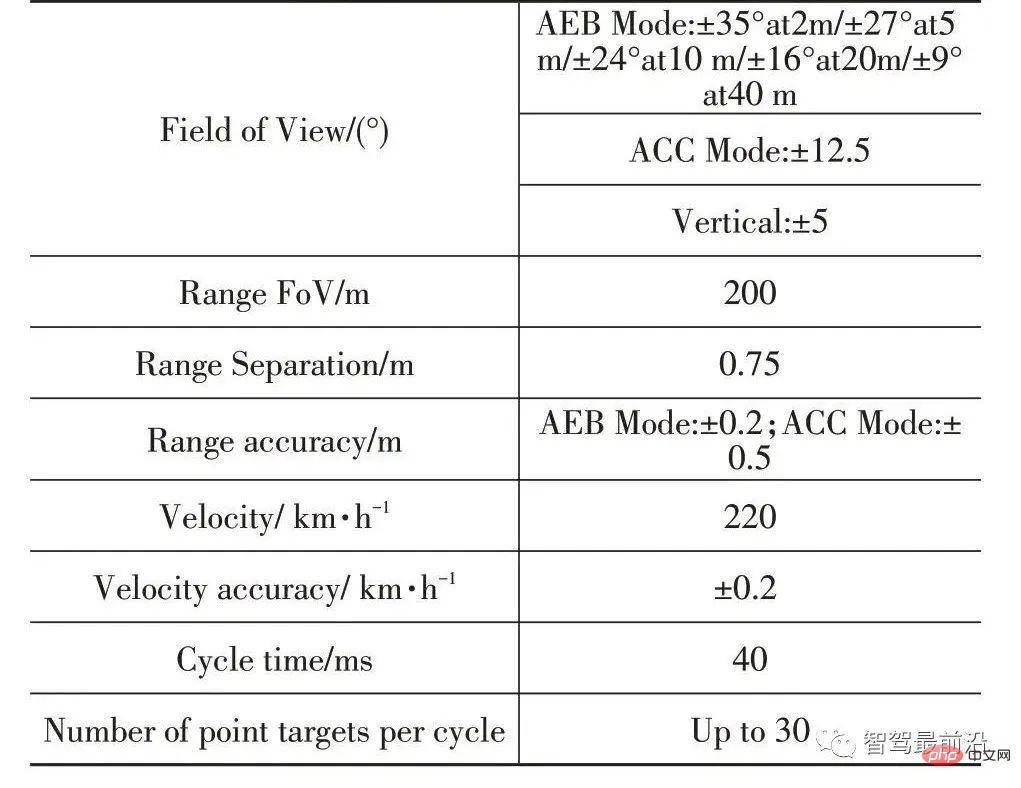
표 3 AC1000의 일부 성능 매개변수
ACC, AEB-C/P 자동 비상 제동을 달성하기 위한 전방 스마트 카메라와 전방 밀리미터파 레이더의 융합 - 차량/사람 ), LDW, LKA, TSR, TJA(교통 정체 보조) 및 ICA(지능형 크루즈 보조)는 L2 수준의 운전 보조를 달성할 수 있습니다(그림 1). 거리와 도로정보는 모두 융합된 데이터로 감지가 정확합니다. 단일 레이더, 단일 카메라 및 융합 솔루션의 비교는 표 4에 나와 있습니다.
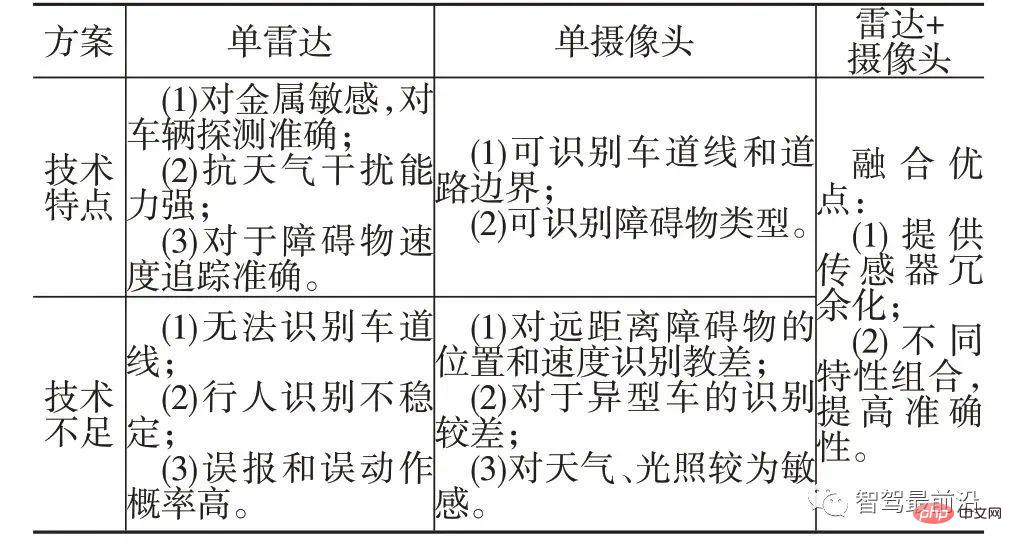
표 4 단일 레이더, 단일 카메라 및 융합 솔루션의 비교
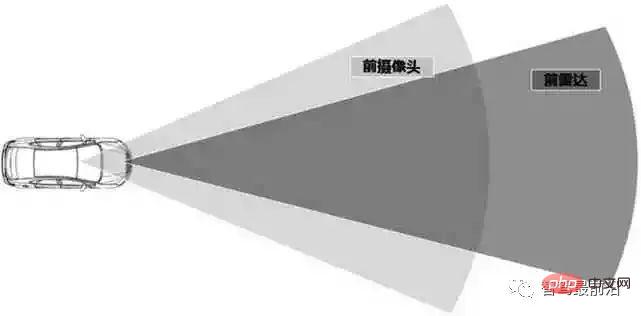
그림 1 전방 스마트 카메라와 전방 밀리미터파 레이더의 융합
측면 밀리미터파 레이더(앵글 레이더)
측면 밀리미터파 레이더(24GHz)는 사각지대 모니터링 기능을 구현하며, 구현 방법은 2가지가 있습니다. 후방 2mm파 레이더, BSD(사각지대 모니터링), LCW(차선 변경 충돌 경고), RCTA(후방 교차로 경고) 및 DOW(도어 열림 경고) 기능을 구현합니다. + 전면 2개 밀리미터파 레이더는 위의 기능을 구현하는 것 외에도 FCTA(전방 교차 교통 경고)를 구현하고 L2 수준 이상의 고급 운전 보조 기능을 지원할 수 있습니다. 과학 기술의 발전에 따라 측면 밀리미터파 레이더의 성능도 점차 향상되고 있습니다(표 5 참조).

표 5 측면 밀리미터파 레이더의 부분 매개변수 및 개발
측면 밀리미터파 레이더(4), 전방 밀리미터파 레이더(1), 전방 스마트 카메라(1) L2+(또는 L3-) 수준의 자율 주행을 달성하기 위해 조합하여 사용할 수 있습니다. L2 레벨 자율주행에는 TJA/HWAML(고속도로 주행 보조 - 다차선), ALC(능동 차선 변경 보조), TLC(Triggered Lane Change Assist), ELK(긴급 차선 유지), ESA(긴급 조향 보조)가 포함됩니다. 추가), JA(교차로 보조), 전방위 경고(BSD/DOW/RCTA/FCTA/LCW 포함)(그림 2). 고속도로 상황에서 자동 운전 기능을 실현할 수 있습니다.
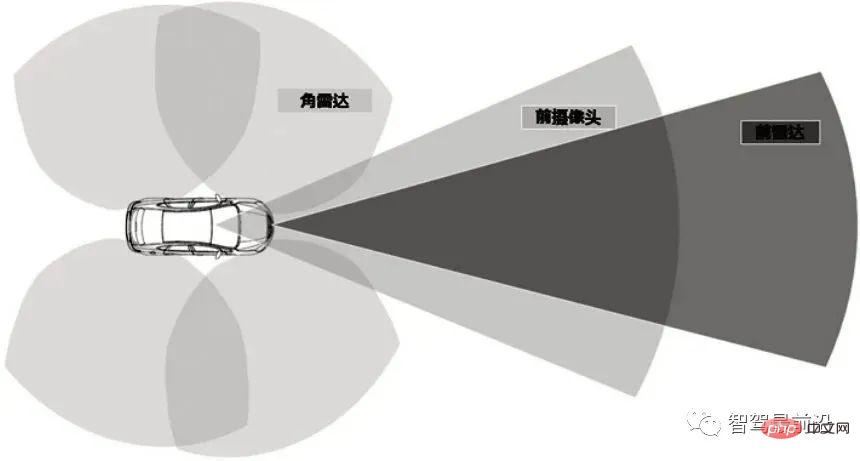
그림 2 전방 카메라, 전방 밀리미터파 레이더, 각도 레이더의 융합
초음파 레이더
초음파 레이더의 단거리 표적 탐지 특성에 따르면(표 6), 초음파 레이더는 다양한 수량 조합을 기반으로 PDC(후진 레이더), APA(자동 주차 보조) 및 BSD(사각지대 모니터링) 기능을 실현할 수 있습니다. PDC 기능을 구현하기 위해 리어 범퍼에 4개의 초음파 레이더를 장착했으며, 일부 차량에는 후진 시 전방의 장애물을 감지하기 위해 프런트 범퍼에 4개의 초음파 레이더(전면과 후면에 총 8개)를 동시에 설치했습니다. 4개의 초음파 레이더가 전면 및 후면 범퍼 측면에 설치되어 근거리 사각지대 모니터링 기능을 구현합니다. 동시에 전면 및 후면 초음파 레이더 8개와 결합하여 총 12개의 초음파 레이더가 APA 기능을 구현합니다. . BSD 기능을 구현하기 위해 차량 측면에 밀리미터파 각도 레이더를 설치하는 경우에는 측면에 초음파 레이더를 설치할 필요가 없습니다. BSD가 초음파 레이더를 설치하는 가장 큰 이유는 비용상의 이점이다. 초음파 레이더의 다양한 조합과 기능이 그림 3에 나와 있습니다.
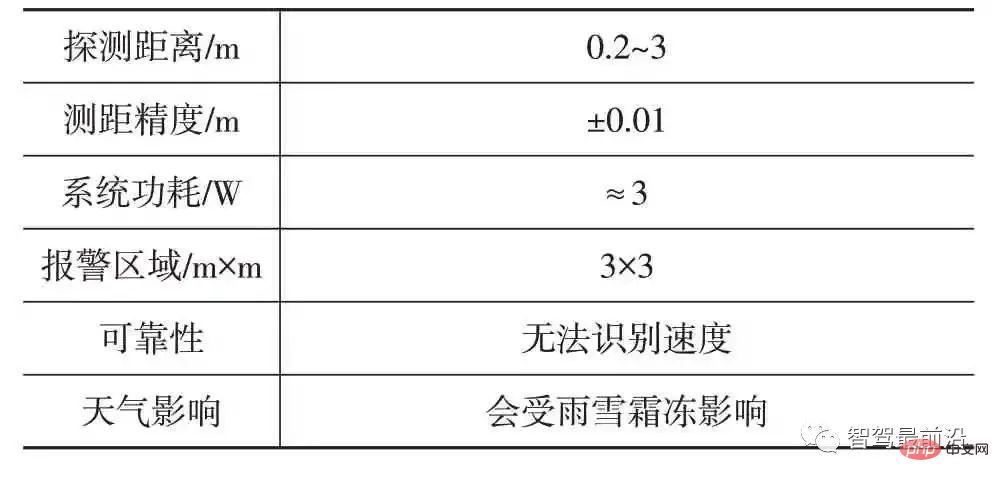
표 6 초음파 레이더의 일부 매개변수 및 특성
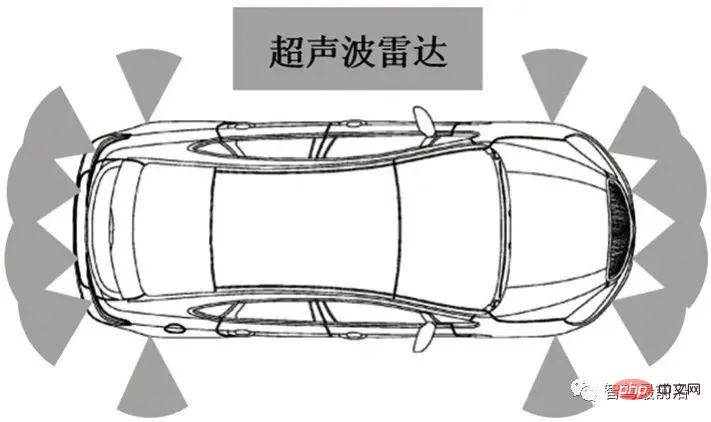
그림 3 초음파 레이더 솔루션 레이아웃
서라운드 뷰 카메라
AVM형 감시 영상 시스템)을 통해 전후좌우 4개의 이미지 센서(서라운드 뷰 카메라)는 차량 주변 환경에 대한 데이터를 수집하고, CVBS(표준 화질)/LVDS(고화질)을 통해 파노라마 이미지 컨트롤러로 이미지를 전송합니다. 후방에 카메라 하나만 설치하면 반전영상 기능을 구현할 수 있다. 전면, 후면, 왼쪽, 오른쪽에 4개의 카메라를 동시에 설치하면 4개의 카메라에서 입력된 영상의 왜곡 보정 및 크롭을 통해 4개 뷰 통합과 2D 탑 뷰 효과, 3D 회전 통합을 구현합니다. 효과(HD 솔루션)를 제공하고 최종적으로 MP5를 통해 표시됩니다. 서라운드 뷰 카메라의 일부 중요한 매개변수는 표 7에 표시되어 있으며 해당 레이아웃은 전체 차량의 그림 4에 표시되어 있습니다.
센서 차량 레이아웃 융합
첨단 운전 보조 시스템의 다양한 센서 간의 결합 레이아웃은 적용 범위와 중복성을 고려해야 합니다. 다양한 센서의 감지 범위에는 고유한 장점과 한계가 있습니다. 현재 개발 추세는 센서 정보 융합 기술을 사용하여 단일 센서의 단점을 보완하고 전체 지능형 주행 시스템의 안전성과 신뢰성을 향상시키는 것입니다. 적용 범위: 차체 360°를 커버해야 합니다. 중요도에 따라 전면 감지 거리가 더 길고(120m) 후면 감지 거리가 약간 짧습니다. 왼쪽과 오른쪽이 가장 짧습니다(20m). 보안을 보장하기 위해 각 영역은 상호 검증을 위해 2개 이상의 센서로 보호되어야 합니다. 그림 5는 레이아웃 계획을 보여줍니다.
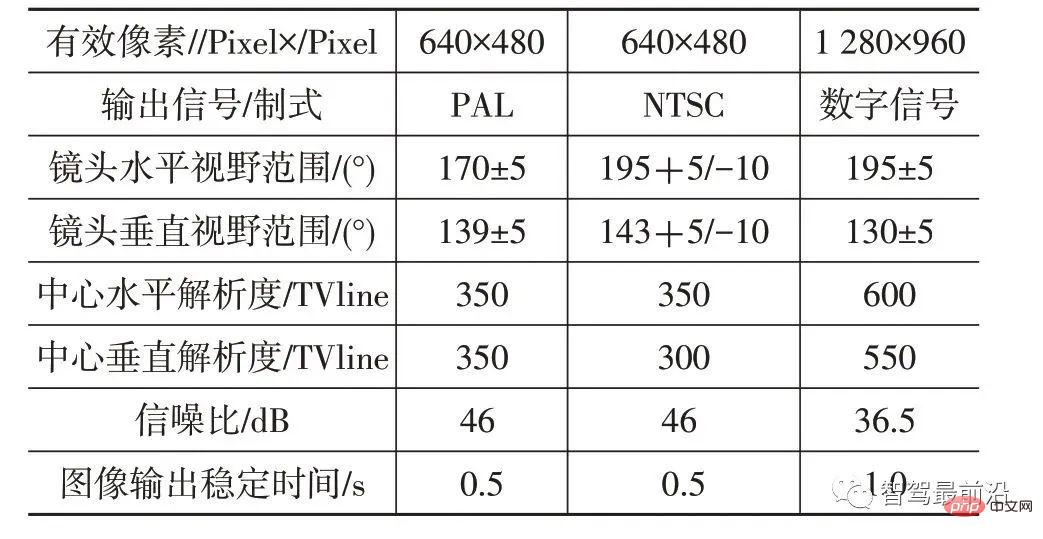
표 7 서라운드 뷰 카메라의 일부 매개변수
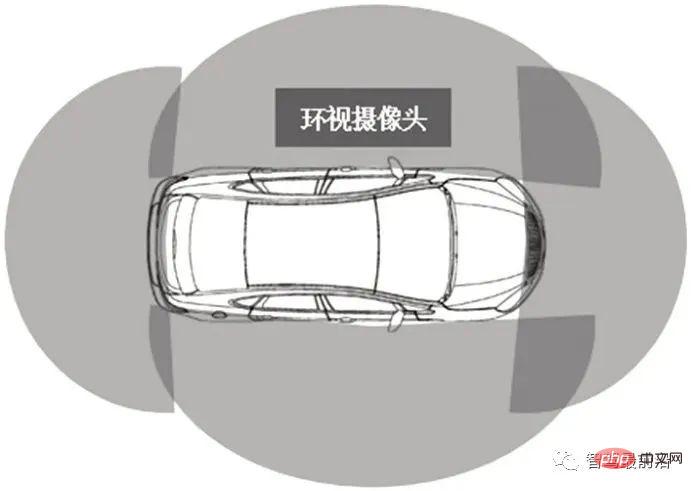
그림 4 서라운드 뷰 카메라 솔루션 레이아웃
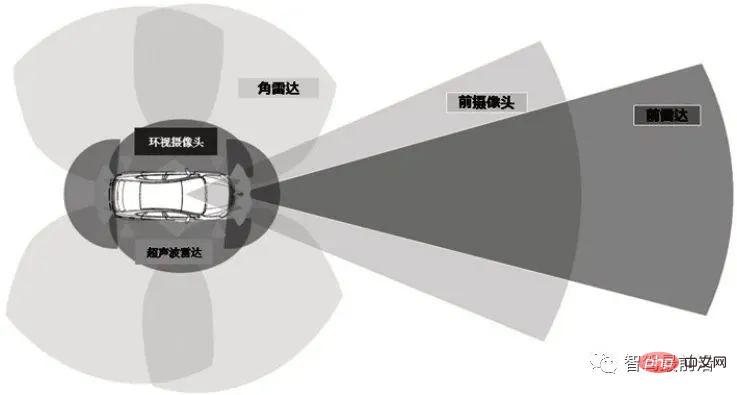
그림 5 센서 레이아웃과 융합의 매틱
전방 지능 카메라와 전방 밀리미터파 레이더 레이아웃의 통합
전면 레이더 설치 위치는 레이더 성능 매개변수 요구 사항 및 차체 모양에 따라 설정되며 합리적인 레이아웃 위치가 설정됩니다. 지면 위의 레이더 높이(레이더 안테나 축에서 지면까지의 거리)는 50cm가 권장되며 30cm에서 120cm 사이가 허용됩니다. 지면에서 30cm에 가까운 높이에서는 직접적인 신호 수신을 방해하고 감지 위험을 줄이는 과도한 지면 반사 신호가 있을 수 있습니다. 레이더와 보호 덮개 사이의 거리는 15mm보다 크고(레이더 빔에 대한 복잡한 근거리 장의 영향을 피할 수 있는 파장의 2배) 40mm 미만(레이더 파동의 지나치게 큰 교차 표면을 피하기 위해) ). 레이더 측면 위치 좌표는 -30cm에서 30cm 사이입니다. 레이더가 전면 커버와 함께 설치되는 경우 곡률 반경 > 600mm, 빔과 커버 사이 교차점의 균일한 두께, 시뮬레이션 테스트를 거쳐야 하는 프로파일 등 커버에 대한 특별한 요구 사항도 있습니다. , 전기적 특성을 시험해야 하는 재료, 비도포 부품 등 밀리미터파 레이더 빔과 주변 구조물 사이의 거리가 5mm를 초과하고 차량과의 각도(피치 각도, 요 각도 및 롤 각도)가 0° 이상입니다. 레이더 FOV와 번호판 프레임 사이의 거리가 더 깁니다. 번호판을 설치한 후 레이더 감지에 영향을 주지 않도록 15mm 이상 유지하세요. 그림 6과 같습니다.
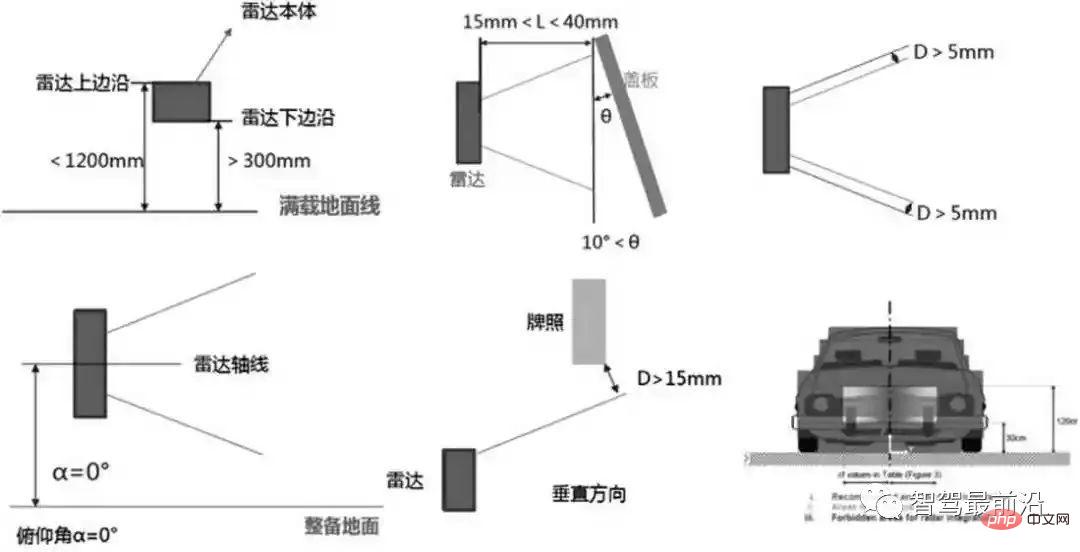
그림 6 전방 밀리미터파 레이더 레이아웃
전면 카메라의 수직 설치 위치가 가장 좋은 곳은 전면 유리 중앙이고 높이는 1,200mm 이상이 바람직하며 오프셋이 허용됩니다. 앞 유리의 중심선을 10cm 이내로 이동하십시오. 요각, 롤각, 피치각은 0°(±3°)에 가까운 것이 바람직하다. 브라켓은 깨끗한 유리 공간에 설치해야 하며, 실크스크린이나 프린팅 등으로 시야가 가려지지 않아야 합니다. 카메라 창과 와이퍼 트랙 라인 사이의 거리는 30mm 이상이어야 하며, 렌즈 모듈과 앞 유리 사이의 간격은 1mm 이상이어야 합니다. 개구부는 전면 유리의 각 층에 투사된 화각에 따라 결정되어야 합니다. 통풍구(120mm2보다 큰 개구부)는 공기 순환을 보장하기 위해 카메라 브래킷과 커버에 설계되어야 합니다. 전면 유리에 장착할 때 브래킷의 위치 공차는 일반적으로 ±1mm(위치 지정) 및 ±2.5°(회전)입니다(그림 7).
측면 밀리미터파 레이더(각 레이더)의 레이아웃 융합
각 레이더는 성능 매개변수 요구 사항 및 차체 모양을 기반으로 합리적인 레이아웃 위치를 설정하며 차체는 레이아웃을 위한 공간을 확보해야 합니다. 각도 레이더 배치 높이에 대한 요구 사항: 너무 낮으면 진흙, 물, 먼지가 레이더에 영향을 미치고, 너무 높으면 차량에 가까운 사각지대가 더 커집니다(이로 인해 시야가 확보되지 않을 수 있음). ±20°를 초과하는 경우) 권장 높이는 400mm~1,000mm입니다. 사각지대를 최소화하기 위해서는 레이더와 차량 세로축 사이의 각도가 30°~45°가 되어야 하며, 레이더와 차량 수평면 사이의 각도는 90°로 제어하는 것이 가장 좋습니다. 레이더 FOV 시야에는 금속, 능선, 다층 구조 또는 재료가 없습니다. FOV와 커버 사이의 최대 각도는 70°이고 곡률은 350mm보다 커야 합니다.
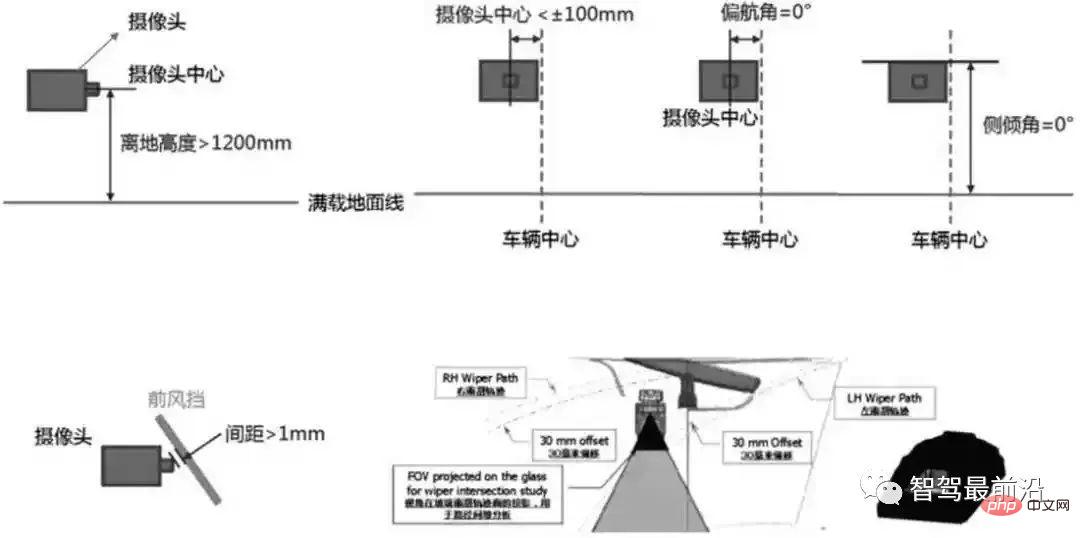
그림 7 전면 카메라 레이아웃 다이어그램
초음파 레이더 레이아웃 융합
APA 기능을 구현하려면 12개의 초음파 레이더가 차량 전체에 배치되어야 하며, 레이아웃이 상대적으로 큽니다. 초음파 레이더 센서는 마운팅 브라켓에 장착되며 범퍼 스킨과 접착되어 고정됩니다. 감지 요구 사항을 최대한 충족하기 위해 초음파 레이더 레이아웃 위치는 특정 요구 사항을 제공합니다(그림 8 참조). 레이아웃에 대한 구체적인 요구 사항은 다음과 같습니다: 자동차 범퍼 표면에 레이더를 배치하지 않기, 레이더 감지 영역을 방해하는 사진 촬영 피하기, 열원 배기관, 고출력 램프에서 멀리 두기 등.
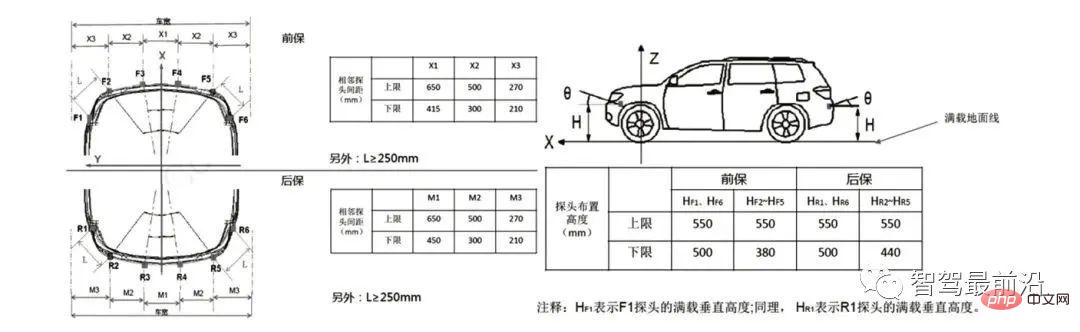
그림 8 초음파 레이더 레이아웃 위치 요구 사항
서라운드 뷰 카메라
AVM 서라운드 뷰 시스템, 총 4개의 카메라가 전면, 후면, 왼쪽 및 오른쪽에 배치되어야 합니다. 차체. 전면 카메라는 전면 그릴 근처에 설치됩니다. 후방 카메라는 뒷문 번호판 표시등 위 또는 근처에 설치됩니다. 왼쪽 및 오른쪽 카메라는 백미러 하우징 하단에 설치해야 하며 왼쪽 및 오른쪽 카메라 설치를 용이하게 하려면 왼쪽 및 오른쪽 백미러에 카메라 구멍을 예약해야 합니다. 인접한 카메라의 이미지가 충분히 겹치도록 카메라를 배열할 때 광학 교정을 수행해야 하며, 이미지 접합은 카메라의 1° 조립 오류 내에 검은색 가장자리가 없음을 보장할 수 있어야 하며, 사각지대는 기업 표준의 요구 사항을 초과해서는 안 됩니다. 촬영된 이미지의 변화로 인해 파노라마 이미지가 겹쳐지는 것을 방지하기 위해 카메라는 회전방지 위치결정 구조를 가져야 한다.
전면 및 후면 카메라 배치 요구 사항: 차량이 완전히 적재된 경우 지면 위 높이는 ≥ 600mm입니다. 중앙면으로부터의 거리는 ≤ 50mm입니다. 시각 축은 차량의 XZ 평면과 평행합니다. 시각 축과 차량의 Z 축 사이의 각도는 45°~75°이고 광축과 교차점은 권장됩니다. 지상선은 차체의 가장 바깥쪽에서 1,000~2,000mm이고, 사각지대 시야는 200mm 이하입니다. 카메라의 수직 시야는 3,000mm이고 3,000mm를 완전히 볼 수 있습니다. 높은 물체가 땅 위에 똑바로 서 있는 것. 그림 9는 서라운드 뷰 카메라(전면)의 레이아웃 요구 사항을 보여줍니다.
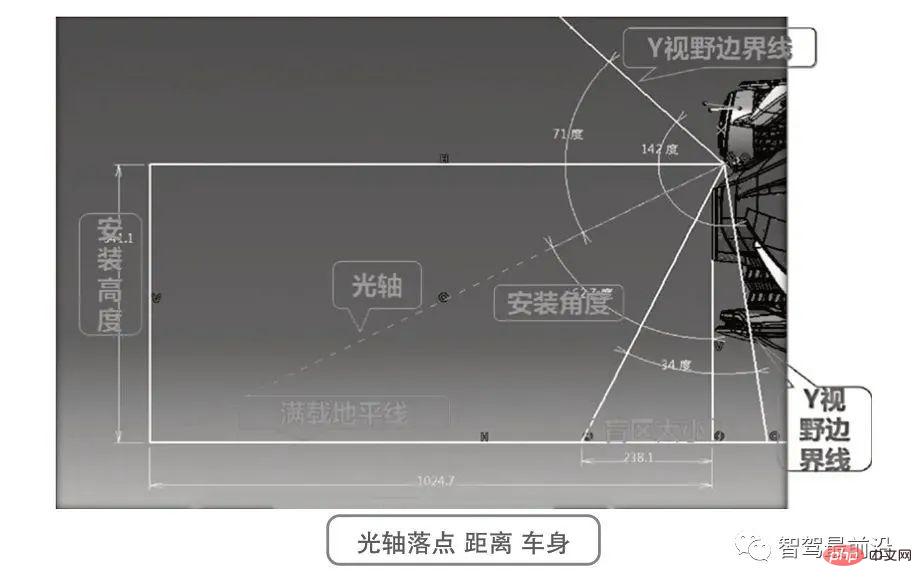
그림 9 서라운드 뷰 카메라 배치 요구 사항(전면)
왼쪽 및 오른쪽 카메라 배치 요구 사항(백미러): 카메라의 전면 뷰, 카메라 사이의 각도 시야각과 수직선 사이의 각도는 20~25°를 권장합니다. 설치 높이는 차량 돌출 거리보다 1.5~5°를 권장합니다. 차체는 100mm보다 커야 하며, 시야는 차량 앞뒤로 10m를 커버해야 하며, 10m의 시야는 백미러 하우징에 연결되어야 합니다. 하단 가장자리 사이의 거리는 1mm보다 커야 합니다. 전면 및 후면 5m 시야각과 광축 사이의 각도는 85° 미만이고, 5m 시야각과 백미러 하우징 하단 가장자리 사이의 최소 거리는 1.2mm보다 큽니다. 돌출부는 5mm 미만(조정 가능)입니다.
첨단 주행 보조 시스템의 센서는 감지 범위의 중복 적용 범위를 보장하는 것 외에도 실제 설치 시 각 센서 및 차량의 설치 조건도 준수해야 합니다. 본 글에서 소개하는 센서 레이아웃 매개변수는 특정 자동차 모델과 특정 공급업체의 센서 제품을 기준으로 요약하고 융합한 것입니다. 센서 공급업체마다 레이아웃 요구 사항이 약간씩 다릅니다. 실제 차량 모델 레이아웃 프로세스 중에 공급업체가 제공한 레이아웃 요구 사항과 차량의 레이아웃 및 모양을 기반으로 적응형 조정이 이루어져야 합니다.
위 내용은 ADAS 시스템 센서를 어떻게 배열해야 하는지에 대한 기사의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7696
7696
 15
1640
14
1393
52
1287
25
1229
29
15
1640
14
1393
52
1287
25
1229
29

 보행자 궤적 예측을 위한 효과적인 방법과 일반적인 기본 방법은 무엇입니까? 최고의 컨퍼런스 논문 공유!
Oct 17, 2023 am 11:13 AM
보행자 궤적 예측을 위한 효과적인 방법과 일반적인 기본 방법은 무엇입니까? 최고의 컨퍼런스 논문 공유!
Oct 17, 2023 am 11:13 AM
궤적 예측은 지난 2년 동안 추진력을 얻었지만 대부분은 차량 궤적 예측의 방향에 중점을 두고 있습니다. 오늘날 자율 주행 심장은 제한된 시나리오에서 인간의 보행자 궤적 예측을 위한 알고리즘인 NeurIPS를 공유합니다. 움직임 패턴은 일반적으로 어느 정도 제한된 규칙을 따릅니다. SHENet은 이러한 가정을 바탕으로 암묵적인 장면 규칙을 학습하여 사람의 미래 궤적을 예측합니다. 이 기사는 자율주행하트의 원본임을 인정받았습니다! 저자의 개인적 이해는 현재 사람의 미래 궤적을 예측하는 것이 인간 움직임의 무작위성과 주관성으로 인해 여전히 어려운 문제라는 것입니다. 그러나 제한된 장면에서 인간의 움직임 패턴은 장면 제약(예: 평면도, 도로 및 장애물)과 인간 대 인간 또는 인간 대 객체 상호 작용으로 인해 달라지는 경우가 많습니다.
 iPhone 15의 USB C를 마우스에 연결하는 방법은 무엇입니까?
Oct 23, 2023 pm 11:13 PM
iPhone 15의 USB C를 마우스에 연결하는 방법은 무엇입니까?
Oct 23, 2023 pm 11:13 PM
Apple은 마침내 iPhone 15 및 15 Pro 시리즈에 USBC 연결을 추가하여 iPhone에서 많은 수의 컴퓨터 액세서리를 사용할 수 있게 되었습니다. 일부 사용자는 키보드와 마우스를 연결하여 iPhone을 컴퓨터로 바꿀 수 있는지 궁금할 수 있습니다. 컴퓨터? 1: 먼저 설정 입력, 보조 사용 2: 터치 선택 3: 보조 터치 선택 4: 보조 터치 활성화 5: 시작하면 트랙패드를 사용하여 아이패드처럼 점이 표시되고, 각 버튼에 대해 설정을 지정합니다. 홈 화면 키, 보조 키 등과 같은 기능을 사용하려면 다음 단계를 입력하고 "설정"의 "보조 사용"으로 이동할 수 있습니다. 6: 터치 선택 7: 보조 터치 8: 장치 선택 9: 연결한 마우스 이름 선택 10: 추가 버튼을 누른 후 마우스에 설정하려는 버튼 클릭 11: 그런 다음
 LimSim++: 자율 주행의 다중 모드 대형 모델을 위한 새로운 단계
Mar 12, 2024 pm 03:10 PM
LimSim++: 자율 주행의 다중 모드 대형 모델을 위한 새로운 단계
Mar 12, 2024 pm 03:10 PM
논문 이름: LimSim++: AClosed-LoopPlatform for DeployingMultimodalLLMsinAutonomousDriving 프로젝트 홈페이지: https://pjlab-adg.github.io/limsim_plus/ 시뮬레이터 소개 다중 모드 대형 언어 모델((M)LLM)이 다음 분야에서 연구 붐을 일으켰습니다. 인공지능, 자율주행 기술에의 적용이 점차 주목받고 있습니다. 이러한 모델은 강력한 일반화된 이해와 논리적 추론 능력을 통해 안전하고 신뢰할 수 있는 자율 주행 시스템을 구축하는 데 강력한 지원을 제공합니다. HighwayEnv, CA 등 기존 폐쇄 루프 시뮬레이션 플랫폼이 있지만
 Microsoft는 Visual Studio Code 1.80을 업데이트합니다.
Jul 10, 2023 pm 08:13 PM
Microsoft는 Visual Studio Code 1.80을 업데이트합니다.
Jul 10, 2023 pm 08:13 PM
Microsoft는 최근 Visual Studio Code 1.80을 출시했습니다. 이 업데이트는 7월에 출시되었지만 공식에서는 여전히 6월 업데이트라고 부릅니다. 사용자가 이 업데이트를 설치하면 내장 터미널에 이미지가 직접 표시될 수 있으며 보조 기능도 최적화됩니다. 이전에 출시된 Visual Studio Code 미리 보기 버전에서는 터미널의 이미지 지원이 지원되었으며 새 1.80 버전에서는 기본적으로 활성화됩니다. 터미널에서 이미지를 표시할 수 있도록 이미지 픽셀 데이터는 특수 이스케이프 시퀀스를 통해 텍스트로 변환되고 최종적으로 터미널에 기록됩니다. 일반적인 PNG, GIF 또는 JPEG 파일을 터미널에 파이프하려면 imgcatpython 패키지를 설치한 다음 터미널에서 imgc를 실행해야 합니다.
 스타아이언의 보조캐릭터 최강 순위, 보조캐릭터 8명 중 최강은 누구? 그 중 하나는 '신 중의 신'이라고 할 수 있습니다!
Feb 18, 2024 pm 03:33 PM
스타아이언의 보조캐릭터 최강 순위, 보조캐릭터 8명 중 최강은 누구? 그 중 하나는 '신 중의 신'이라고 할 수 있습니다!
Feb 18, 2024 pm 03:33 PM
Collapse Star Railroad의 보조 역할은 특히 중요합니다. 좋은 보조 캐릭터는 팀을 크게 향상시킬 수 있습니다. 오늘 Xiaofang은 Star Rail의 어떤 보조 캐릭터를 먼저 육성할 수 있는지 살펴볼 것입니다. T2: 지정된 팀 전략 카드 유콩 유콩은 메인 C에게 높은 더블 버스트와 공격 보너스를 제공할 수 있을 뿐만 아니라 높은 인성 면도 능력도 갖추고 있습니다. 현재 핵폭발에 꼭 필요한 캐릭터이지만 유콩은 속도가 필요합니다. 엄격하고 실제 전투에서는 수동 제어에 크게 의존하며 자동 강도가 불안정한 동시에 6라이프가 아닌 스카이 컨트롤도 BUFF 커버리지가 부족한 문제가 있습니다. 따라서 현재 Yu Kong의 훈련 우선 순위는 상대적으로 낮습니다. 속도와 수동 게임 플레이를 선호하거나 Moon Drinking Fox 팀과 Crow Yu 팀을 자주 사용하지 않는 한 다른 지원을 선택해 볼 수 있습니다. 에스타 서버 오픈 시 무료로 제공되는 보조 캐릭터로서 에스타는 모두에게 도움을 줄 수 있습니다.
 '천국의 전설' 보조선발 추천
Jan 14, 2024 pm 08:21 PM
'천국의 전설' 보조선발 추천
Jan 14, 2024 pm 08:21 PM
Legend of Tianjing은 2차원 그래픽을 사용하여 플레이어에게 독특한 동화 속 모험을 선사하는 매우 흥미로운 중국 스타일의 카드 모바일 게임입니다. 게임에서 수백 마리의 악마 영혼을 소환하여 함께 싸울 수 있습니다! 게임에서 라인업은 매우 중요합니다. Legend of Sky Realm의 지원을 선택하는 방법은 무엇입니까? 아래는 에디터가 전하는 '천국의 전설' 보조선발 추천 내용입니다. 더 알고 싶으시다면 빨리 오세요! '천공의 전설' 보조 선택은 보조 지원(팀 지원, 팀원 치유), 철갑 지원, 흐르는 출력을 권장합니다. 드래곤 프린스라는 바람 시스템의 SP를 본 적이 있나요? 그와 함께 5성으로 전투에 참여할 수 있습니다. 그는 확실히 당신의 위시 리스트에 자리를 차지할 것입니다. 그의 피를 빨아들이는 오라는 치료의 절반을 제공할 수 있으며, 전투가 끝날 때까지 지속되어 취약한 버프를 20번 중첩하면 데미지가 15% 증가하고 보너스 기절을 제공합니다.
 ADAS 시스템 센서를 어떻게 배열해야 하는지에 대한 기사
May 05, 2023 am 10:49 AM
ADAS 시스템 센서를 어떻게 배열해야 하는지에 대한 기사
May 05, 2023 am 10:49 AM
이 기사에서는 먼저 첨단 운전 보조 시스템에서 센서 배치 전략의 중요성을 소개하고, 전방 스마트 카메라, 전방 및 측면 밀리미터파 레이더(77GHz/22GHz), 초음파 레이더 및 서라운드 뷰를 포함한 첨단 운전 보조 시스템 센서 유형을 제안합니다. 카메라 각 센서의 성능 특성을 간략하게 설명합니다. 그런 다음 현재 대량 생산 공급업체의 솔루션을 예로 들어 감지 거리, 감지 범위 및 외부 레이아웃 환경에 대한 요구 사항을 포함하여 다양한 센서 성능 매개 변수를 자세히 소개합니다. 본 논문에서는 차량에만 다양한 센서를 사용하여 달성할 수 있는 기능과 다양한 운전 보조 수준 및 다양한 기능 조합을 갖춘 다양한 센서의 융합 전략을 소개합니다. 마지막으로, 달성해야 하는 성능 요구 사항과 감지 범위 중복성을 기반으로 차량에 다양한 센서를 합리적으로 설치하는 방법을 소개합니다.
 도로 위 운전자의 '신의 어시스트'! BIT, 운전 안전성 향상을 위한 하이브리드 뇌-컴퓨터 인터페이스 운전 보조 시스템 개발
Apr 09, 2023 pm 05:41 PM
도로 위 운전자의 '신의 어시스트'! BIT, 운전 안전성 향상을 위한 하이브리드 뇌-컴퓨터 인터페이스 운전 보조 시스템 개발
Apr 09, 2023 pm 05:41 PM
사람들의 생활 수준이 향상됨에 따라 자동차가 수천 가구에 보급되었습니다. 그러나 자동차는 여행의 편리함을 제공하지만, 교통사고는 운전자와 보행자의 생명안전에 중요한 위협이 되고 있습니다. 2018년 세계보건기구(WHO)의 불완전한 통계에 따르면, 도로 교통사고는 인명 피해와 경제적 손실을 초래하는 중요한 요인 중 하나입니다. 교통사고로 인해 매년 약 135만 명이 사망하고 2천만~5천만 명이 부상을 입습니다. 매년 GDP의 약 3%가 교통사고로 소비됩니다. 그 중 피로운전은 과속 다음으로 교통사고를 일으키는 중요한 요인이다. 따라서 "숙련된 운전자"라 할지라도 운전 안전은 결코 작은 문제가 아닙니다. 운전 안전 문제를 바탕으로 베이징 공과대학 기계 및 차량 공학부 Bi Luzheng 교수가 이끄는 지능형 인간-기계 시스템 팀의 Luo Long은 최근
