

Python을 사용하여 포인트 클라우드 지면 감지 구현

1. 컴퓨터 비전 좌표계
시작하기 전에 컴퓨터 비전의 전통적인 좌표계를 이해하는 것이 중요합니다. 그 다음에는 Open3D와 Microsoft Kinect 센서가 있습니다. 컴퓨터 비전에서 이미지는 별도의 2D 좌표계로 표현됩니다. 여기서 x축은 왼쪽에서 오른쪽으로, y축은 위쪽과 아래쪽을 가리킵니다. 카메라의 경우 3D 좌표계의 원점은 카메라의 초점에 있으며, x축은 오른쪽을 가리키고 y축은 아래를 가리키며 z축은 앞쪽을 가리킵니다.
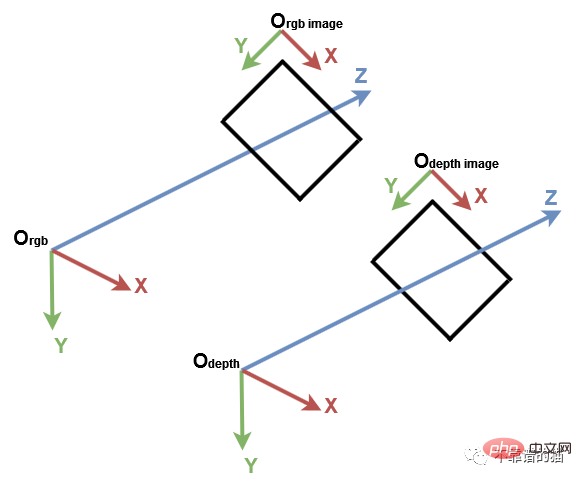
컴퓨터 비전 좌표계
먼저 필요한 Python 라이브러리를 가져옵니다.
import numpy as np import open3d as o3d
더 나은 이해를 위해 PLY 파일에서 포인트 클라우드를 가져오고 Open3D를 사용하여 기본 3D 좌표계를 만든 다음 표시해 보겠습니다.
# Read point cloud:
pcd = o3d.io.read_point_cloud("data/depth_2_pcd.ply")
# Create a 3D coordinate system:
origin = o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.5)
# geometries to draw:
geometries = [pcd, origin]
# Visualize:
o3d.visualization.draw_geometries(geometries)
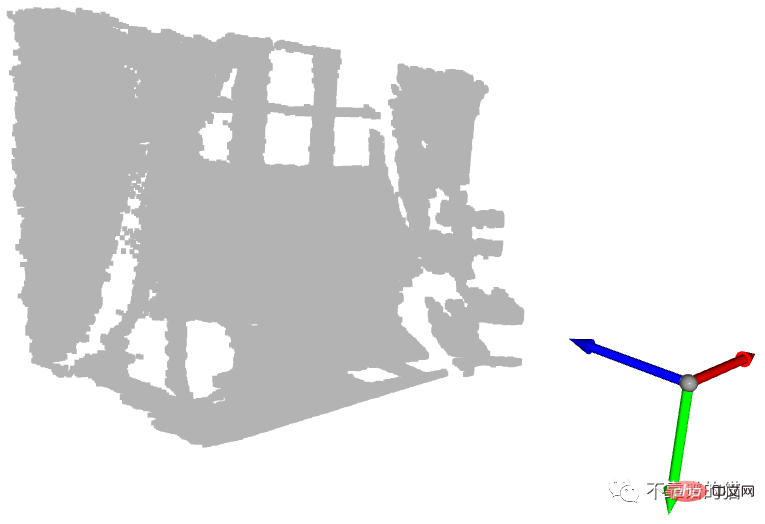
좌표계 원점과 함께 표시된 포인트 클라우드
파란색 화살표는 Z축, 빨간색 화살표는 X축, 녹색 화살표는 Y축입니다. Open3D 좌표계와 동일한 좌표계로 포인트 클라우드가 표현되는 것을 확인할 수 있습니다. 이제 각 축의 최소값과 최대값으로 점을 구해 보겠습니다.
# Get max and min points of each axis x, y and z: x_max = max(pcd.points, key=lambda x: x[0]) y_max = max(pcd.points, key=lambda x: x[1]) z_max = max(pcd.points, key=lambda x: x[2]) x_min = min(pcd.points, key=lambda x: x[0]) y_min = min(pcd.points, key=lambda x: x[1]) z_min = min(pcd.points, key=lambda x: x[2])
인쇄할 수도 있지만 더 나은 시각화를 위해 각 점 위치에 구를 만듭니다. 기본적으로 Open3D는 원점 위치에 3D 형상을 생성합니다.
구를 주어진 위치로 이동하려면 변환 변환이 필요합니다. 아래 예제에서 구는 벡터 [1,1,1]에 의해 변환됩니다.
예제로 돌아가서 각 구에 색상을 지정해 보겠습니다. 각 위치에 대해 구를 만들고 해당 위치로 변환합니다. 그런 다음 올바른 색상을 할당하고 마지막으로 이를 디스플레이에 추가합니다.
# Colors: RED = [1., 0., 0.] GREEN = [0., 1., 0.] BLUE = [0., 0., 1.] YELLOW = [1., 1., 0.] MAGENTA = [1., 0., 1.] CYAN = [0., 1., 1.] positions = [x_max, y_max, z_max, x_min, y_min, z_min] colors = [RED, GREEN, BLUE, MAGENTA, YELLOW, CYAN] for i in range(len(positions)): # Create a sphere mesh: sphere = o3d.geometry.TriangleMesh.create_sphere(radius=0.05) # move to the point position: sphere.translate(np.asarray(positions[i])) # add color: sphere.paint_uniform_color(np.asarray(colors[i])) # compute normals for vertices or faces: sphere.compute_vertex_normals() # add to geometry list to display later: geometries.append(sphere) # Display: o3d.visualization.draw_geometries(geometries)
실제로 y축은 점의 높이를 나타냅니다. 현실 세계에서 가장 높은 공은 노란색 공이고 가장 낮은 공은 녹색 공입니다. 그러나 y축이 아래쪽을 향하고 있으므로 노란색 구체의 값이 가장 작고 녹색 구체의 값이 가장 큽니다.
또 다른 흥미로운 구는 원점에 있는 청록색 구입니다. 이전 튜토리얼에서 언급했듯이 깊이 값이 0인 픽셀은 노이즈 포인트이므로 원점에 위치한 포인트는 이러한 노이즈 픽셀에서 계산된 포인트입니다(z=0이면 x=0, y=0).
2. 지상 감지
이제 몇 가지 중요한 사항을 살펴보았으니, 이전 예에서 녹색 구체는 지상에 있습니다. 정확히 말하면 그 중심은 지상점인 y축의 가장 높은 지점에 해당한다. 지면 감지를 위해 y_max를 사용하여 모든 점의 색상을 녹색으로 변경한다고 가정합니다.
포인트 클라우드를 표시하면 모든 지면 점이 녹색이 아니라는 것을 알 수 있습니다. 실제로 이전 녹색 구의 중심에 해당하는 점 하나만 녹색입니다. 이는 깊이 카메라의 정확도와 노이즈 때문입니다.
이 제한을 극복하려면 y 좌표가 [y_max-threshold, y_max]인 지점이 지상 지점으로 간주되도록 임계값을 추가해야 합니다. 이를 위해 y_max를 얻은 후 각 점의 y 좌표가 간격 내에 있는지 확인한 다음 색상을 녹색으로 설정합니다. 마지막으로 포인트 클라우드의 색상 속성이 업데이트되고 결과가 표시됩니다.
# Define a threshold: THRESHOLD = 0.075 # Get the max value along the y-axis: y_max = max(pcd.points, key=lambda x: x[1])[1] # Get the original points color to be updated: pcd_colors = np.asarray(pcd.colors) # Number of points: n_points = pcd_colors.shape[0] # update color: for i in range(n_points): # if the current point is aground point: if pcd.points[i][1] >= y_max - THRESHOLD: pcd_colors[i] = GREEN# color it green pcd.colors = o3d.utility.Vector3dVector(pcd_colors) # Display: o3d.visualization.draw_geometries([pcd, origin])
이 경우에는 바탕색을 나타내는 점만 녹색으로 색칠하겠습니다. 실제 응용 프로그램에서는 지면을 추출하여 로봇이나 시각 장애인 시스템과 같이 보행 가능한 영역을 정의하거나 인테리어 디자인 시스템과 같은 물체를 그 위에 배치합니다. 또한 제거할 수 있으므로 장면 이해 및 객체 감지 시스템에서와 같이 나머지 지점을 분할하거나 분류할 수 있습니다.
3. 정리된 포인트 클라우드
우리는 포인트 클라우드가 3D 포인트의 집합으로 정의된다는 것을 알고 있습니다. 집합은 순서가 없는 구조이므로, 집합으로 표현되는 포인트 클라우드를 비조직 포인트 클라우드라고 합니다. RGB 매트릭스와 유사하게 구성된 포인트 클라우드는 포인트의 x, y 및 z 좌표를 나타내는 3개 채널이 있는 2D 매트릭스입니다. 행렬 구조는 인접한 점 간의 관계를 제공함으로써 최근접 이웃 알고리즘과 같은 일부 알고리즘의 시간 복잡도를 줄입니다.
예를 들어, 우리는 연구 논문을 작성 중이며 탐지 알고리즘의 결과를 그래프 형식으로 표시하려고 합니다. 아래 그림과 같이 포인트 클라우드의 스크린샷을 찍거나 깊이 이미지에 결과를 표시할 수 있습니다. 제 생각에는 두 번째 옵션이 가장 좋습니다. 이 경우 깊이 픽셀의 위치를 저장하기 위해 체계적인 포인트 클라우드가 필요합니다.
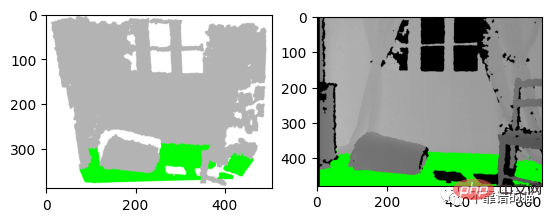
左:3D 可视化的屏幕截图 右:深度图像的结果
让我们从之前的深度图像创建一个有组织的点云。我们首先导入相机参数。我们还导入深度图像并将其转换为3通道灰度图像,以便我们可以将地面像素设置为绿色:
import imageio.v3 as iio
import numpy as np
import matplotlib.pyplot as plt
# Camera parameters:
FX_DEPTH = 5.8262448167737955e+02
FY_DEPTH = 5.8269103270988637e+02
CX_DEPTH = 3.1304475870804731e+02
CY_DEPTH = 2.3844389626620386e+02
# Read depth image:
depth_image = iio.imread('../data/depth_2.png')
# Compute the grayscale image:
depth_grayscale = np.array(256 * depth_image / 0x0fff, dtype=np.uint8)
# Convert a grayscale image to a 3-channel image:
depth_grayscale = np.stack((depth_grayscale,) * 3, axis=-1)要计算一个有组织的点云,我们使用与上一篇教程相同的方法(Python:基于 RGB-D 图像的点云计算)。我们没有将深度图像扁平化,而是将jj和ii重塑为与深度图像相同的形状,如下所示:
# get depth image resolution: height, width = depth_image.shape # compute indices and reshape it to have the same shape as the depth image: jj = np.tile(range(width), height).reshape((height, width)) ii = np.repeat(range(height), width).reshape((height, width)) # Compute constants: xx = (jj - CX_DEPTH) / FX_DEPTH yy = (ii - CY_DEPTH) / FY_DEPTH # compute organised point cloud: organized_pcd = np.dstack((xx * depth_image, yy * depth_image, depth_image))
如果你打印出创建的点云的形状,你可以看到它是一个有3个通道的矩阵(480,640,3)。如果你觉得这个代码很难理解,请回到之前的教程(Python:基于 RGB-D 图像的点云计算)。
类似地,我们像上面那样检测地面,但不是更新点的颜色并显示点云,而是更新灰度图像的像素并显示它:
# Ground_detection: THRESHOLD = 0.075 * 1000# Define a threshold y_max = max(organized_pcd.reshape((height * width, 3)), key=lambda x: x[1])[ 1]# Get the max value along the y-axis # Set the ground pixels to green: for i in range(height): for j in range(width): if organized_pcd[i][j][1] >= y_max - THRESHOLD: depth_grayscale[i][j] = [0, 255, 0]# Update the depth image # Display depth_grayscale: plt.imshow(depth_grayscale) plt.show()
4.结论
在本教程中,为了熟悉点云,我们引入了默认坐标系统,并实现了一个简单的地面检测算法。事实上,地面检测在某些应用(如导航)中是一项重要的任务,文献中已经提出了几种算法。实现算法简单;它认为最低点是地面。然而,它的限制是,深度相机必须与地面平行,这是大多数现实应用的情况不是这样的。
위 내용은 Python을 사용하여 포인트 클라우드 지면 감지 구현의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7569
7569
 15
1386
52
87
11
61
19
28
107
15
1386
52
87
11
61
19
28
107

 PHP 및 Python : 코드 예제 및 비교
Apr 15, 2025 am 12:07 AM
PHP 및 Python : 코드 예제 및 비교
Apr 15, 2025 am 12:07 AM
PHP와 Python은 고유 한 장점과 단점이 있으며 선택은 프로젝트 요구와 개인 선호도에 달려 있습니다. 1.PHP는 대규모 웹 애플리케이션의 빠른 개발 및 유지 보수에 적합합니다. 2. Python은 데이터 과학 및 기계 학습 분야를 지배합니다.
 Python vs. JavaScript : 커뮤니티, 라이브러리 및 리소스
Apr 15, 2025 am 12:16 AM
Python vs. JavaScript : 커뮤니티, 라이브러리 및 리소스
Apr 15, 2025 am 12:16 AM
Python과 JavaScript는 커뮤니티, 라이브러리 및 리소스 측면에서 고유 한 장점과 단점이 있습니다. 1) Python 커뮤니티는 친절하고 초보자에게 적합하지만 프론트 엔드 개발 리소스는 JavaScript만큼 풍부하지 않습니다. 2) Python은 데이터 과학 및 기계 학습 라이브러리에서 강력하며 JavaScript는 프론트 엔드 개발 라이브러리 및 프레임 워크에서 더 좋습니다. 3) 둘 다 풍부한 학습 리소스를 가지고 있지만 Python은 공식 문서로 시작하는 데 적합하지만 JavaScript는 MDNWebDocs에서 더 좋습니다. 선택은 프로젝트 요구와 개인적인 이익을 기반으로해야합니다.
 Docker 원리에 대한 자세한 설명
Apr 14, 2025 pm 11:57 PM
Docker 원리에 대한 자세한 설명
Apr 14, 2025 pm 11:57 PM
Docker는 Linux 커널 기능을 사용하여 효율적이고 고립 된 응용 프로그램 실행 환경을 제공합니다. 작동 원리는 다음과 같습니다. 1. 거울은 읽기 전용 템플릿으로 사용되며, 여기에는 응용 프로그램을 실행하는 데 필요한 모든 것을 포함합니다. 2. Union 파일 시스템 (Unionfs)은 여러 파일 시스템을 스택하고 차이점 만 저장하고 공간을 절약하고 속도를 높입니다. 3. 데몬은 거울과 컨테이너를 관리하고 클라이언트는 상호 작용을 위해 사용합니다. 4. 네임 스페이스 및 CGroup은 컨테이너 격리 및 자원 제한을 구현합니다. 5. 다중 네트워크 모드는 컨테이너 상호 연결을 지원합니다. 이러한 핵심 개념을 이해 함으로써만 Docker를 더 잘 활용할 수 있습니다.
 Python에서 비주얼 스튜디오 코드를 사용할 수 있습니다
Apr 15, 2025 pm 08:18 PM
Python에서 비주얼 스튜디오 코드를 사용할 수 있습니다
Apr 15, 2025 pm 08:18 PM
VS 코드는 파이썬을 작성하는 데 사용될 수 있으며 파이썬 애플리케이션을 개발하기에 이상적인 도구가되는 많은 기능을 제공합니다. 사용자는 다음을 수행 할 수 있습니다. Python 확장 기능을 설치하여 코드 완료, 구문 강조 및 디버깅과 같은 기능을 얻습니다. 디버거를 사용하여 코드를 단계별로 추적하고 오류를 찾아 수정하십시오. 버전 제어를 위해 git을 통합합니다. 코드 서식 도구를 사용하여 코드 일관성을 유지하십시오. 라인 도구를 사용하여 잠재적 인 문제를 미리 발견하십시오.
 터미널 VSCODE에서 프로그램을 실행하는 방법
Apr 15, 2025 pm 06:42 PM
터미널 VSCODE에서 프로그램을 실행하는 방법
Apr 15, 2025 pm 06:42 PM
vs 코드에서는 다음 단계를 통해 터미널에서 프로그램을 실행할 수 있습니다. 코드를 준비하고 통합 터미널을 열어 코드 디렉토리가 터미널 작업 디렉토리와 일치하는지 확인하십시오. 프로그래밍 언어 (예 : Python의 Python Your_file_name.py)에 따라 실행 명령을 선택하여 성공적으로 실행되는지 여부를 확인하고 오류를 해결하십시오. 디버거를 사용하여 디버깅 효율을 향상시킵니다.
 VScode 확장자가 악의적입니까?
Apr 15, 2025 pm 07:57 PM
VScode 확장자가 악의적입니까?
Apr 15, 2025 pm 07:57 PM
VS 코드 확장은 악의적 인 코드 숨기기, 취약성 악용 및 합법적 인 확장으로 자위하는 등 악성 위험을 초래합니다. 악의적 인 확장을 식별하는 방법에는 게시자 확인, 주석 읽기, 코드 확인 및주의해서 설치가 포함됩니다. 보안 조치에는 보안 인식, 좋은 습관, 정기적 인 업데이트 및 바이러스 백신 소프트웨어도 포함됩니다.
 Windows 8에서 코드를 실행할 수 있습니다
Apr 15, 2025 pm 07:24 PM
Windows 8에서 코드를 실행할 수 있습니다
Apr 15, 2025 pm 07:24 PM
VS 코드는 Windows 8에서 실행될 수 있지만 경험은 크지 않을 수 있습니다. 먼저 시스템이 최신 패치로 업데이트되었는지 확인한 다음 시스템 아키텍처와 일치하는 VS 코드 설치 패키지를 다운로드하여 프롬프트대로 설치하십시오. 설치 후 일부 확장은 Windows 8과 호환되지 않을 수 있으며 대체 확장을 찾거나 가상 시스템에서 새로운 Windows 시스템을 사용해야합니다. 필요한 연장을 설치하여 제대로 작동하는지 확인하십시오. Windows 8에서는 VS 코드가 가능하지만 더 나은 개발 경험과 보안을 위해 새로운 Windows 시스템으로 업그레이드하는 것이 좋습니다.
 파이썬 : 자동화, 스크립팅 및 작업 관리
Apr 16, 2025 am 12:14 AM
파이썬 : 자동화, 스크립팅 및 작업 관리
Apr 16, 2025 am 12:14 AM
파이썬은 자동화, 스크립팅 및 작업 관리가 탁월합니다. 1) 자동화 : 파일 백업은 OS 및 Shutil과 같은 표준 라이브러리를 통해 실현됩니다. 2) 스크립트 쓰기 : PSUTIL 라이브러리를 사용하여 시스템 리소스를 모니터링합니다. 3) 작업 관리 : 일정 라이브러리를 사용하여 작업을 예약하십시오. Python의 사용 편의성과 풍부한 라이브러리 지원으로 인해 이러한 영역에서 선호하는 도구가됩니다.
