
 기술 주변기기
일체 포함
교육 비용은 1,000위안 미만으로 90% 절감됩니다! NUS와 Tsinghua University, VPGTrans 출시: GPT-4와 같은 다중 모드 대형 모델을 쉽게 사용자 정의
기술 주변기기
일체 포함
교육 비용은 1,000위안 미만으로 90% 절감됩니다! NUS와 Tsinghua University, VPGTrans 출시: GPT-4와 같은 다중 모드 대형 모델을 쉽게 사용자 정의
교육 비용은 1,000위안 미만으로 90% 절감됩니다! NUS와 Tsinghua University, VPGTrans 출시: GPT-4와 같은 다중 모드 대형 모델을 쉽게 사용자 정의

올해는 ChatGPT로 대표되는 LLM(대형 언어 모델)이 인기를 끌면서 AI 기술이 폭발적으로 발전하는 해입니다.
언어 모델은 자연어 분야에서 큰 잠재력을 보이는 것 외에도 점차 다른 양식으로 확산되기 시작했습니다. 예를 들어 Vincentian 그래프 모델 Stable Diffusion에도 언어 모델이 필요합니다.
시각 언어 모델(VL-LLM)을 처음부터 훈련하려면 많은 양의 리소스가 필요한 경우가 많기 때문에 기존 솔루션은 언어 모델과 시각적 프롬프트 생성 모델(Visual Prompt Generator, VPG)을 연결하는 것입니다. 그럼에도 불구하고 VPG를 계속 조정하려면 여전히 수천 개의 GPU 시간과 수백만 개의 교육 데이터가 필요합니다.
최근 싱가포르 국립대학교와 칭화대학교 연구진은 목표 VL-LLM 모델을 얻기 위해 기존 VPG를 기존 VL-LLM 모델로 마이그레이션하는 솔루션인 VPGTrans를 제안했습니다.
문서 링크: https://arxiv.org/abs/2305.01278
코드 링크: https://github.com/VPGTrans/VPGTrans
다중 모드 대화 모델 데모: https://vpgtrans.github.io/
저자: Zhang Ao, Fei Hao, Yao Yuan, Ji Wei, Li Li, Liu Zhiyuan, Chua Tat-Seng
단위: 싱가포르 국립대학교, 칭화대학교
기사의 주요 혁신 포인트는 다음과 같습니다:
1 매우 낮은 교육 비용:
우리가 제안한 VPGTrans 방법을 통해 빠를 수 있습니다(훈련 시간 10% 미만) 기존 다중 모드 대화 모델의 시각적 모듈을 새로운 언어 모델로 마이그레이션하여 유사하거나 더 나은 결과를 얻습니다.
예를 들어, 비전 모듈을 처음부터 교육하는 것과 비교하여 BLIP-2 FlanT5-XXL의 교육 비용을 19,000+ RMB에서 1,000 RMB 미만으로 줄일 수 있습니다:
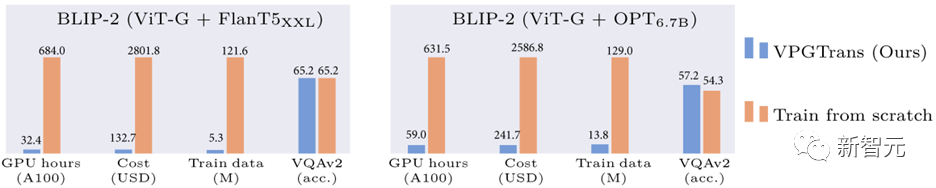
그림 1: VPGTrans 방법을 기반으로 한 BLIP-2 학습 오버헤드 감소 비교
2. 다중 모드 대형 모델 사용자 정의:
VPGTrans 프레임워크를 통해 다양한 새 모델을 다음과 같이 사용자 정의할 수 있습니다. 필요에 따라 대규모 언어 모델은 시각적 모듈을 유연하게 추가할 수 있습니다. 예를 들어 LLaMA-7B 및 Vicuna-7B를 기반으로 VL-LLaMA 및 VL-Vicuna를 생산했습니다.
3. 오픈 소스 다중 모드 대화 모델:
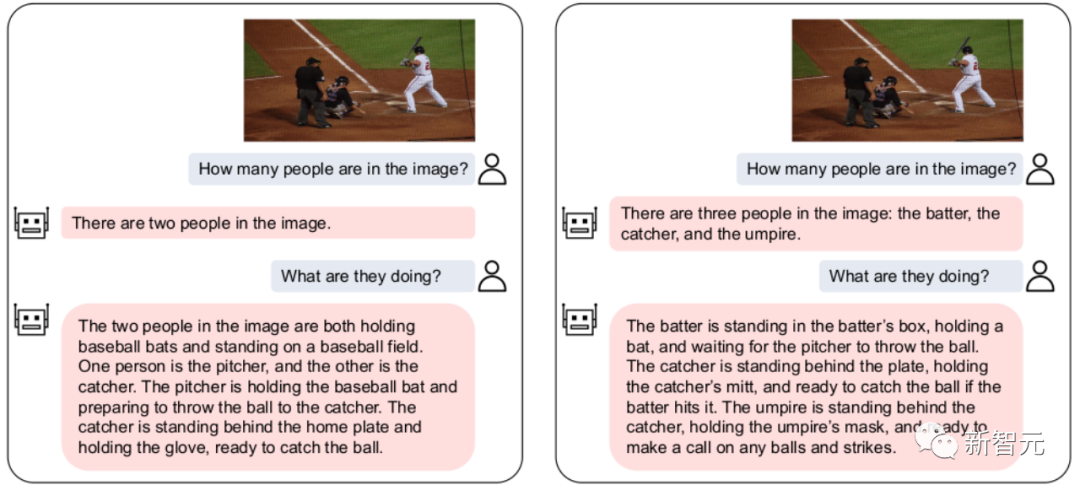
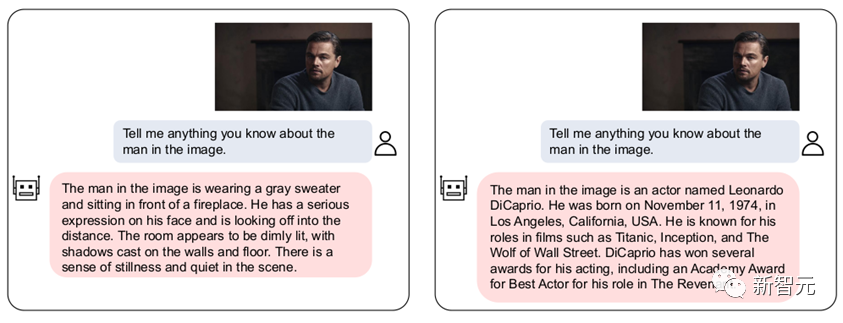
우리는 GPT-4와 유사한 다중 모드 대화 모델인 VL-Vicuna를 오픈합니다. 품질 다중 양식 대화:
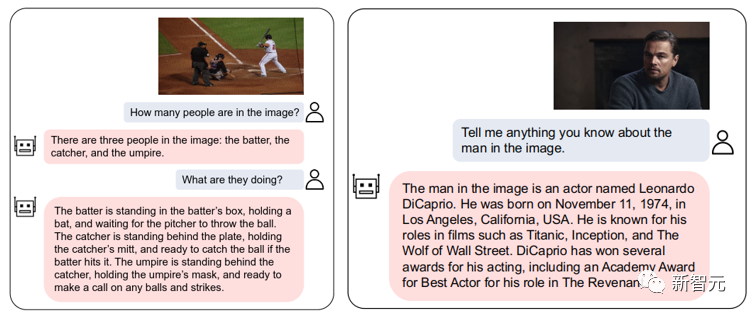
그림 2: VL-Vicuna 상호 작용 예
1. 동기 부여 소개1.1 배경
LLM이 시작되었습니다 의 추세 다중 모드 이해 분야 전통적인 사전 훈련된 시각적 언어 모델(VLM)에서 대규모 언어 모델(VL-LLM) 기반의 시각적 언어 모델로의 전환.
비주얼 모듈을 LLM에 연결함으로써 VL-LLM은 기존 LLM의 지식, 제로 샘플 일반화 능력, 추론 능력 및 계획 능력을 계승할 수 있습니다. 관련 모델로는 BLIP-2[1], Flamingo[2], PALM-E 등이 있습니다.
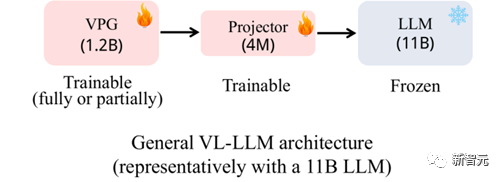
그림 3: 일반적으로 사용되는 VL-LLM 아키텍처
기존 일반적으로 사용되는 VL-LLM은 기본적으로 그림 3에 표시된 아키텍처를 채택합니다. 시각적 소프트 프롬프트를 기반으로 기본 LLM 교육 생성 모듈(Visual Prompt Generator, VPG) 및 차원 변환을 위한 선형 레이어(프로젝터).
매개변수 규모 측면에서 LLM은 일반적으로 주요 부분(예: 11B)을 차지하고, VPG는 보조 부분(예: 1.2B)을 차지하며, Projector가 가장 작은 부분(4M)을 차지합니다.
훈련 과정 중에 LLM 매개변수는 일반적으로 업데이트되지 않거나 아주 적은 수의 매개변수만 업데이트됩니다. 훈련 가능한 매개변수는 주로 VPG와 프로젝터에서 나옵니다.
1.2 Motivation
실제로 기본 LLM의 매개변수가 동결되고 훈련되지 않더라도 LLM의 매개변수 양이 많기 때문에 VL-LLM 훈련의 주요 오버헤드는 여전히 다음과 같습니다. 기본 LLM을 로드합니다.
따라서 VL-LLM을 훈련하는 것은 여전히 엄청난 계산 비용을 피할 수 없습니다. 예를 들어 BLIP-2(기본 LLM은 FlanT5-XXL)를 획득하려면 600시간 이상의 A100 교육 시간이 필요합니다. Amazon의 A100-40G 기계를 임대하면 거의 20,000 위안의 비용이 듭니다.
VPG를 처음부터 교육하는 데 비용이 많이 들기 때문에 비용을 절감하기 위해 기존 VPG를 새로운 LLM으로 마이그레이션할 수 있는지 에 대해 생각하기 시작했습니다.
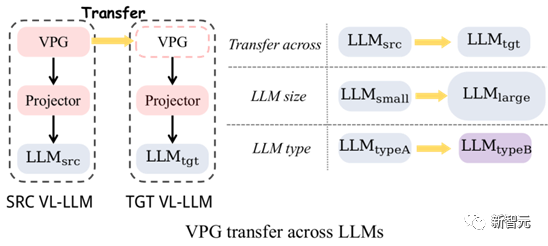
그림 4: VPG 마이그레이션: 교차 LLM 크기 마이그레이션 및 교차 LLM 유형 마이그레이션
그림 4에서 볼 수 있듯이 우리는 주로 두 가지 유형의 VPG 마이그레이션을 살펴보았습니다.
(1) 교차 LLM 크기 마이그레이션(TaS): 예: OPT-2.7B에서 OPT-6.7B로.
(2) 교차 LLM 유형 마이그레이션(TaT): 예를 들어 OPT에서 FlanT5로.
TaS의 중요성은 LLM 관련 과학 연구에서 일반적으로 작은 LLM에서 매개변수를 조정한 다음 대규모 LLM으로 확장해야 한다는 것입니다. TaS를 사용하면 소형 LLM에서 훈련된 VPG를 매개변수 조정 후 대형 LLM으로 직접 마이그레이션할 수 있습니다.
TaT의 의의는 오늘날의 LLaMA, 내일의 Alpaca 및 Vicuna와 같이 다양한 기능 유형을 가진 LLM이 끝없이 등장한다는 것입니다. TaT를 사용하면 기존 VPG를 사용하여 새로운 언어 모델에 시각적 인식 기능을 신속하게 추가할 수 있습니다.
1.3 기여
(1) 효율적인 방법 제안:
먼저 일련의 탐색적 실험을 통해 VPG 마이그레이션 효율성에 영향을 미치는 핵심 요소를 탐색했습니다. 탐색적 실험 결과를 바탕으로 우리는 2단계 효율적인 마이그레이션 프레임워크인 VPGTrans를 제안합니다. 이 프레임워크는 VL-LLM을 교육하는 데 필요한 계산 오버헤드와 필수 교육 데이터를 크게 줄일 수 있습니다.
예를 들어, 처음부터 훈련하는 것과 비교할 때 BLIP-2 OPT-2.7B에서 6.7B로의 VPG 마이그레이션을 통해 데이터 및 컴퓨팅 시간의 약 10%만 사용하여 유사하거나 더 나은 결과를 얻을 수 있습니다. 각 데이터 세트 좋은 효과 (그림 1) . 교육 비용은 17901위안에서 1673위안입니다.
(2) 흥미로운 결과 얻기:
TaS 및 TaT 시나리오 모두에서 몇 가지 흥미로운 결과를 제공하고 설명을 제공하려고 합니다.
a) TaS 시나리오에서 VPGTrans를 사용하여 소규모에서 대규모로 마이그레이션하면 최종 모델 효과에 영향을 미치지 않습니다.
b) TaS 시나리오에서는 언어 모델에서 훈련된 VPG가 작을수록 대형 모델로 마이그레이션할 때 효율성이 높아지고 최종 효과도 더 좋아집니다.
c) TaT 시나리오에서는 모델이 작을수록 마이그레이션 간격이 더 커집니다. 검증 실험에서 VPGTrans를 사용하는 OPT350M과 FlanT5 기반 간의 상호 마이그레이션은 처음부터 훈련하는 것만큼 느립니다.
(3) 오픈 소스:
우리는 VPGTrans를 사용하여 두 개의 새로운 VL-LLM인 VL-LLaMA 및 VL-Vicuna을 얻고 커뮤니티에서 오픈 소스를 제공했습니다. 그 중 VL-Vicuna는 GPT4와 유사한 고품질 다중 모드 대화를 구현합니다.
2. 고효율 VPG 마이그레이션 솔루션: VPGTrans
먼저 VPG의 마이그레이션 효율성을 극대화하는 방법을 분석하기 위해 일련의 탐색 및 검증 실험을 수행합니다. 그런 다음 이러한 중요한 관찰을 기반으로 솔루션을 제안합니다.
2.1 탐색 실험
기본 모델로 BLIP-2 아키텍처를 선택했고, 사전 학습 코퍼스는 COCO와 SBU를 사용했으며 총 140만 개의 이미지와 텍스트 쌍이 있습니다.
다운스트림 작업은 COCO Caption, NoCaps, VQAv2, GQA 및 OK-VQA의 제로샷 설정을 사용하여 평가됩니다(캡션 작업은 엄밀히 말하면 제로샷이 아닙니다). 주요 결과는 다음과 같습니다.
(1) 훈련된 VPG를 직접 상속하면 수렴을 가속화할 수 있지만 효과는 제한적입니다.
LLM에서 훈련된 VPG를 Large로 직접 마이그레이션하는 것이 발견되었습니다. LLM은 모델 수렴을 가속화할 수 있지만 가속 효과는 제한적이며 수렴 후 모델 효과는 VPG를 처음부터 훈련하는 것에 비해 떨어집니다(그림 5의 VQAv2 및 GQA 파란색 선의 가장 높은 지점은 모두 주황색 선보다 낮습니다) .
이 하락은 무작위로 초기화된 프로젝터가 훈련 시작 시 VPG의 기존 시각적 인식 능력을 손상시키기 때문인 것으로 추측됩니다.

아래 그림은 구현된 VPG(파란색 곡선)를 직접 상속하여 얻은 결과를 보여줍니다. VPG 재교육(주황색 선): VPG를 처음부터 재교육합니다. 수행된 유일한 교육은 선형 프로젝터에 대한 교육이며 VPG에 대한 교육은 없습니다.
(2) 먼저 프로젝터를 워밍업 훈련하면 포인트 저하를 방지하고 수렴을 더욱 가속화할 수 있습니다.
그래서 VPG와 LLM을 수정하고 먼저 3 에포크 동안 프로젝터를 워밍업한 다음, 그런 다음 다음 훈련 단계를 위해 VPG를 고정 해제합니다.
우리는 이것이 포인트 하락을 피할 수 있을 뿐만 아니라 VPG 수렴을 더욱 가속화할 수 있다는 것을 발견했습니다(그림 6).
하지만 교육의 주요 비용은 LLM(거대한 매개변수)이므로 강조할 가치가 있습니다. 프로젝터만 교육하는 비용은 VPG와 프로젝터를 교육하는 비용 보다 훨씬 적지 않습니다. 동시에.
그래서 우리는 프로젝터 예열을 가속화하는 핵심 기술을 탐색하기 시작했습니다.
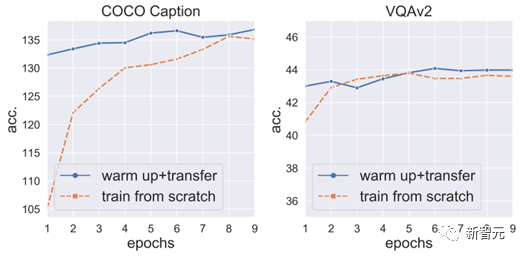
그림 6: 준비 훈련 프로젝터는 먼저 포인트 하락을 방지하고 수렴을 가속화할 수 있습니다.
(3) 워드 벡터 변환기 초기화는 프로젝터 준비 속도를 높일 수 있습니다.
우선 VPG는 이미지를 LLM이 이해할 수 있는 부드러운 프롬프트로 변환하여 효과를 만들어냅니다. 소프트 프롬프트의 사용법은 실제로 단어 벡터와 매우 유사합니다. 둘 다 언어 모델을 직접 입력하여 모델에 해당 콘텐츠를 생성하도록 요청합니다. 그래서 우리는 단어 벡터를 소프트 프롬프트의 프록시로 사용하고
에서 
까지 단어 벡터 변환기(선형 레이어)를 훈련했습니다. 
그런 다음 프로젝터 초기화로 벡터 변환기라는 단어와 프로젝터를
에 융합합니다. 
(4) 프로젝터는 매우 큰 학습 속도로 빠르게 수렴할 수 있습니다.
우리는 추가 실험을 통해 프로젝터가 적은 수의 매개 변수로 인해 충돌 없이 일반 학습 속도의 5배로 훈련될 수 있음을 발견했습니다. .
학습률 5배의 훈련을 통해 프로젝터 워밍업을 1 epoch
로 더욱 단축할 수 있습니다.(5) 추가 조사 결과:
프로젝터 예열도 중요하지만 프로젝터만으로는 충분하지 않습니다. 특히 캡션 작업의 경우 VPG를 동시에 교육하는 것보다 프로젝터만 교육하는 효과가 더 나쁩니다(그림 5의 녹색 선은 COCO Caption과 NoCaps 모두에서 파란색 선보다 훨씬 낮습니다).
이것은 또한 단순히 프로젝터를 훈련시키는 것만으로는 과소적합
으로 이어질 수 있다는 것을 의미합니다. 즉,훈련 데이터에 완전히 정렬될 수 없습니다. 2.2 제안된 방법
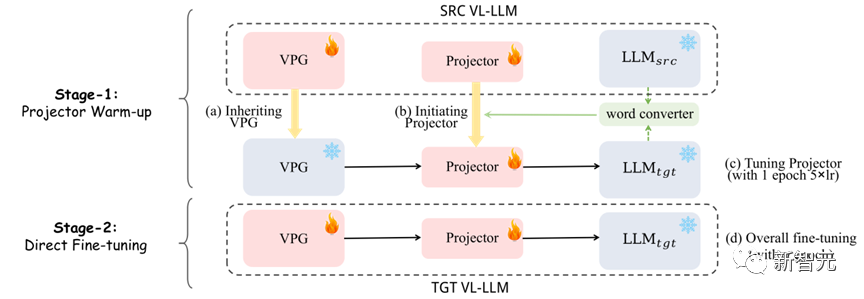
그림 7에서 볼 수 있듯이 우리의 방법은 두 단계로 나뉩니다.
(1) 첫 번째 단계: 먼저 새 프로젝터의 초기화로 워드 벡터 변환기를 사용하여 원래 프로젝터와 융합한 다음 새로운 프로젝터는 한 에포크 동안 5배의 학습률로 학습되었습니다.
(2) 두 번째 단계: VPG와 프로젝터를 정상적으로 직접 교육합니다.
3. 실험 결과
3.1 속도 향상 비율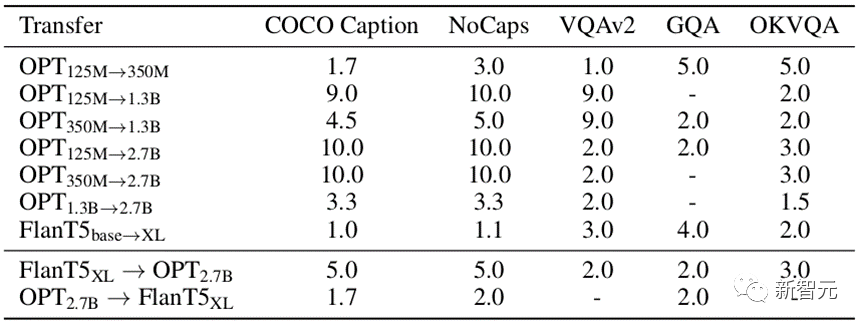
표 1에 표시된 것처럼 다양한 마이그레이션 유형의 다양한 데이터 세트에서 VPGTrans의 속도 향상 비율을 테스트했습니다.
지정된 데이터 세트 A에 대한 VPGTrans의 가속 비율은 A에 대한 최상의 효과 a를 달성하기 위해 처음부터 훈련 라운드 수를 A에 대한 VPGTrans의 효과가 a를 초과하는 최소 훈련 라운드 수로 나누어 얻습니다.
예를 들어 OPT-2.7B에서 VPG를 처음부터 훈련하려면 COCO 캡션에서 최상의 결과를 얻으려면 10세대가 필요하지만 VPG를 OPT-125M에서 OPT-2.7B로 마이그레이션하는 데는 1세대만 필요합니다. . 가속 비율은 10/1=10배입니다.
우리는 우리의 VPGTrans가 TaS나 TaT 시나리오에 상관없이 안정적인 가속을 달성할 수 있음을 알 수 있습니다.
3.2 흥미로운 결과
설명할 더 흥미로운 결과 중 하나를 선택했습니다. 더 흥미로운 결과를 보려면 논문을 참조하세요.
TaS 시나리오에서는 언어 모델에 대해 훈련된 VPG가 작을수록 마이그레이션 효율성이 높아지고 최종 모델 효과가 더 좋아집니다. 표 1을 참조하면, OPT-1.3B에서 OPT-2.7B로의 가속 비율은 OPT-125M과 OPT-350M에서 OPT-2.7b로의 가속 비율보다 훨씬 작음을 알 수 있습니다.
설명을 제공하려고 했습니다. 일반적으로 언어 모델이 클수록 텍스트 공간의 차원이 높기 때문에 VPG를 손상시킬 가능성이 더 높습니다(VPG는 일반적으로 사전 훈련된 모델입니다. CLIP과 유사) 나만의 시각적 인지 능력. 선형 프로빙과 유사한 방식으로 이를 검증했습니다.
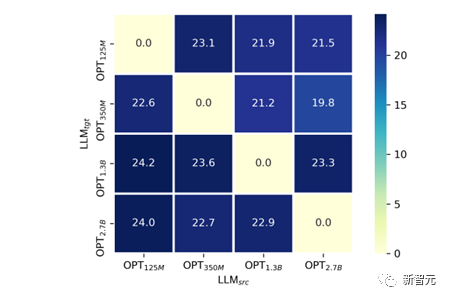
그림 8: 트레이닝 선형 프로젝터 레이어만 교차 LLM 크기 전송(선형 프로빙 시뮬레이션)
그림 8과 같이 , OPT-125M, 350M, 1.3B, 2.7B 사이의 LLM 크기에 걸쳐 마이그레이션을 수행했습니다.
실험에서는 다양한 모델 크기에서 훈련된 VPG의 시각적 인식 능력을 공정하게 비교하기 위해 VPG의 매개변수를 고정하고 선형 프로젝터 레이어만 훈련했습니다. 우리는 시각적 인식 능력의 척도로 COCO Caption의 SPICE 지표를 선택했습니다.
각  에 대해
에 대해  이 작을수록 최종 SPICE가 높아지는 현상과 거의 일치한다는 것을 찾는 것은 어렵지 않습니다.
이 작을수록 최종 SPICE가 높아지는 현상과 거의 일치한다는 것을 찾는 것은 어렵지 않습니다.
3.3 대규모 실험
이전의 실험은 주로 소규모 시나리오에서 추측을 검증하기 위한 것이었습니다. 우리 방법의 효과를 입증하기 위해 BLIP-2의 사전 훈련 과정을 시뮬레이션하고 대규모 실험을 수행했습니다.
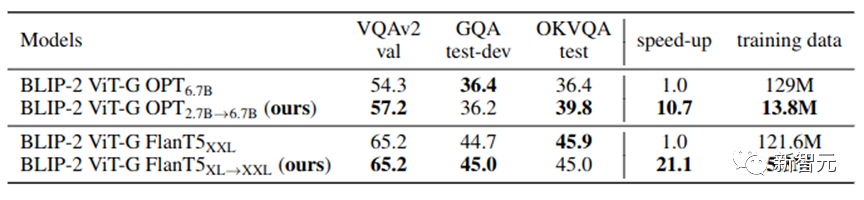
표 2: 실제 시나리오의 대규모 실험 결과
표 2에서 볼 수 있듯이 VPGTrans는 대규모 시나리오에서도 여전히 효과적입니다. OPT-2.7B에서 OPT-6.7B로 마이그레이션함으로써 유사하거나 더 나은 결과를 얻는 데 데이터의 10.8%와 교육 시간의 10% 미만만 사용했습니다.
특히, 우리의 방법은 FlanT5-XXL 기반의 BLIP-2 VL-LLM에서 4.7% 훈련 비용 제어를 달성했습니다.
4. VL-LLM 사용자 정의
VPGTrans는 새로운 LLM에 시각적 인식 모듈을 신속하게 추가하여 새로운 고품질 VL-LLM을 얻을 수 있습니다. 이 작업에서는 VL-LLaMA와 VL-Vicuna를 추가로 훈련합니다. VL-LLaMA의 효과는 다음과 같습니다.
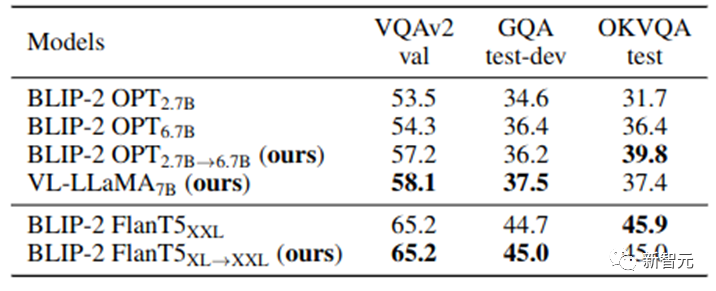
표 3: VL-LLaMA
의 효과 표시 동시에 VL-Vicuna는 GPT-4와 유사한 다중 모드 대화를 수행할 수 있습니다. MiniGPT-4와 간단한 비교를 했습니다:
5. 요약
이번 작업에서는 LLM 간 VPG 마이그레이션 문제에 대한 연구를 수행했습니다. 먼저 마이그레이션 효율성을 극대화하는 핵심 요소를 살펴봅니다.
주요 관찰을 바탕으로 우리는 VPGTrans라는 새로운 2단계 마이그레이션 프레임워크를 제안합니다. 교육 비용을 크게 줄이면서 동등하거나 더 나은 성능을 얻을 수 있습니다.
VPGTrans를 통해 BLIP-2 OPT 2.7B에서 BLIP-2 OPT 6.7B로 VPG 마이그레이션을 달성했습니다. 처음부터 VPG를 OPT 6.7B에 연결하는 것과 비교하여 VPGTrans에는 10.7%의 훈련 데이터와 10% 미만의 훈련 시간만 필요합니다.
또한 일련의 흥미로운 발견과 그 뒤에 있을 수 있는 이유를 제시하고 논의합니다. 마지막으로 VL-LLaMA 및 LL-Vicuna를 교육하여 새로운 VL-LLM을 사용자 정의할 때 VPGTrans의 실질적인 가치를 보여줍니다.
위 내용은 교육 비용은 1,000위안 미만으로 90% 절감됩니다! NUS와 Tsinghua University, VPGTrans 출시: GPT-4와 같은 다중 모드 대형 모델을 쉽게 사용자 정의의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7554
7554
 15
1382
52
83
11
59
19
24
96
15
1382
52
83
11
59
19
24
96

 이제 ChatGPT를 사용하면 무료 사용자가 일일 한도가 있는 DALL-E 3를 사용하여 이미지를 생성할 수 있습니다.
Aug 09, 2024 pm 09:37 PM
이제 ChatGPT를 사용하면 무료 사용자가 일일 한도가 있는 DALL-E 3를 사용하여 이미지를 생성할 수 있습니다.
Aug 09, 2024 pm 09:37 PM
DALL-E 3는 이전 모델보다 대폭 개선된 모델로 2023년 9월 공식 출시되었습니다. 복잡한 디테일의 이미지를 생성할 수 있는 현재까지 최고의 AI 이미지 생성기 중 하나로 간주됩니다. 그러나 출시 당시에는 제외되었습니다.
 세계에서 가장 강력한 오픈 소스 MoE 모델이 여기에 있습니다. 중국의 기능은 GPT-4와 비슷하며 가격은 GPT-4-Turbo의 거의 1%에 불과합니다.
May 07, 2024 pm 04:13 PM
세계에서 가장 강력한 오픈 소스 MoE 모델이 여기에 있습니다. 중국의 기능은 GPT-4와 비슷하며 가격은 GPT-4-Turbo의 거의 1%에 불과합니다.
May 07, 2024 pm 04:13 PM
기존 컴퓨팅을 능가할 뿐만 아니라 더 낮은 비용으로 더 효율적인 성능을 달성하는 인공 지능 모델을 상상해 보세요. 이것은 공상과학 소설이 아닙니다. DeepSeek-V2[1], 세계에서 가장 강력한 오픈 소스 MoE 모델이 여기에 있습니다. DeepSeek-V2는 경제적인 훈련과 효율적인 추론이라는 특징을 지닌 전문가(MoE) 언어 모델의 강력한 혼합입니다. 이는 236B 매개변수로 구성되며, 그 중 21B는 각 마커를 활성화하는 데 사용됩니다. DeepSeek67B와 비교하여 DeepSeek-V2는 더 강력한 성능을 제공하는 동시에 훈련 비용을 42.5% 절감하고 KV 캐시를 93.3% 줄이며 최대 생성 처리량을 5.76배로 늘립니다. DeepSeek은 일반 인공지능을 연구하는 회사입니다.
 안녕하세요, 일렉트릭 아틀라스입니다! 보스턴 다이나믹스 로봇 부활, 180도 이상한 움직임에 겁먹은 머스크
Apr 18, 2024 pm 07:58 PM
안녕하세요, 일렉트릭 아틀라스입니다! 보스턴 다이나믹스 로봇 부활, 180도 이상한 움직임에 겁먹은 머스크
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas가 공식적으로 전기 로봇 시대에 돌입했습니다! 어제 유압식 Atlas가 역사의 무대에서 "눈물을 흘리며" 물러났습니다. 오늘 Boston Dynamics는 전기식 Atlas가 작동 중이라고 발표했습니다. 상업용 휴머노이드 로봇 분야에서는 보스턴 다이내믹스가 테슬라와 경쟁하겠다는 각오를 다진 것으로 보인다. 새 영상은 공개된 지 10시간 만에 이미 100만 명이 넘는 조회수를 기록했다. 옛 사람들은 떠나고 새로운 역할이 등장하는 것은 역사적 필연이다. 올해가 휴머노이드 로봇의 폭발적인 해라는 것은 의심의 여지가 없습니다. 네티즌들은 “로봇의 발전으로 올해 개막식도 인간처럼 생겼고, 자유도도 인간보다 훨씬 크다. 그런데 정말 공포영화가 아닌가?”라는 반응을 보였다. 영상 시작 부분에서 아틀라스는 바닥에 등을 대고 가만히 누워 있는 모습입니다. 다음은 입이 떡 벌어지는 내용이다
 MLP를 대체하는 KAN은 오픈소스 프로젝트를 통해 컨볼루션으로 확장되었습니다.
Jun 01, 2024 pm 10:03 PM
MLP를 대체하는 KAN은 오픈소스 프로젝트를 통해 컨볼루션으로 확장되었습니다.
Jun 01, 2024 pm 10:03 PM
이달 초 MIT와 기타 기관의 연구자들은 MLP에 대한 매우 유망한 대안인 KAN을 제안했습니다. KAN은 정확성과 해석성 측면에서 MLP보다 뛰어납니다. 그리고 매우 적은 수의 매개변수로 더 많은 수의 매개변수를 사용하여 실행되는 MLP보다 성능이 뛰어날 수 있습니다. 예를 들어 저자는 KAN을 사용하여 더 작은 네트워크와 더 높은 수준의 자동화로 DeepMind의 결과를 재현했다고 밝혔습니다. 구체적으로 DeepMind의 MLP에는 약 300,000개의 매개변수가 있는 반면 KAN에는 약 200개의 매개변수만 있습니다. KAN은 MLP와 같이 강력한 수학적 기반을 가지고 있으며, KAN은 Kolmogorov-Arnold 표현 정리를 기반으로 합니다. 아래 그림과 같이 KAN은
 공장에서 일하는 테슬라 로봇, 머스크 : 올해 손의 자유도가 22도에 달할 것!
May 06, 2024 pm 04:13 PM
공장에서 일하는 테슬라 로봇, 머스크 : 올해 손의 자유도가 22도에 달할 것!
May 06, 2024 pm 04:13 PM
테슬라의 로봇 옵티머스(Optimus)의 최신 영상이 공개됐는데, 이미 공장에서 작동이 가능한 상태다. 정상 속도에서는 배터리(테슬라의 4680 배터리)를 다음과 같이 분류합니다. 공식은 또한 20배 속도로 보이는 모습을 공개했습니다. 작은 "워크스테이션"에서 따고 따고 따고 : 이번에 출시됩니다. 영상에는 옵티머스가 공장에서 이 작업을 전 과정에 걸쳐 사람의 개입 없이 완전히 자율적으로 완료하는 모습이 담겨 있습니다. 그리고 Optimus의 관점에서 보면 자동 오류 수정에 중점을 두고 구부러진 배터리를 집어 넣을 수도 있습니다. NVIDIA 과학자 Jim Fan은 Optimus의 손에 대해 높은 평가를 했습니다. Optimus의 손은 세계의 다섯 손가락 로봇 중 하나입니다. 가장 능숙합니다. 손은 촉각적일 뿐만 아니라
 FisheyeDetNet: 어안 카메라를 기반으로 한 최초의 표적 탐지 알고리즘
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 어안 카메라를 기반으로 한 최초의 표적 탐지 알고리즘
Apr 26, 2024 am 11:37 AM
표적 탐지는 자율주행 시스템에서 상대적으로 성숙한 문제이며, 그 중 보행자 탐지는 가장 먼저 배포되는 알고리즘 중 하나입니다. 대부분의 논문에서 매우 포괄적인 연구가 수행되었습니다. 그러나 서라운드 뷰를 위한 어안 카메라를 사용한 거리 인식은 상대적으로 덜 연구되었습니다. 큰 방사형 왜곡으로 인해 표준 경계 상자 표현은 어안 카메라에서 구현하기 어렵습니다. 위의 설명을 완화하기 위해 확장된 경계 상자, 타원 및 일반 다각형 디자인을 극/각 표현으로 탐색하고 인스턴스 분할 mIOU 메트릭을 정의하여 이러한 표현을 분석합니다. 제안된 다각형 형태의 모델 fisheyeDetNet은 다른 모델보다 성능이 뛰어나며 동시에 자율 주행을 위한 Valeo fisheye 카메라 데이터 세트에서 49.5% mAP를 달성합니다.
 옥스포드 대학의 최신 소식! 미키: 3D SOTA로 2D 이미지 매칭! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
옥스포드 대학의 최신 소식! 미키: 3D SOTA로 2D 이미지 매칭! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
앞에 적힌 프로젝트 링크: https://nianticlabs.github.io/mickey/ 두 장의 사진이 주어지면 사진 간의 대응 관계를 설정하여 두 장의 사진 사이의 카메라 포즈를 추정할 수 있습니다. 일반적으로 이러한 대응은 2D에서 2D로 이루어지며 추정된 포즈는 규모에 따라 결정되지 않습니다. 언제 어디서나 즉각적인 증강 현실과 같은 일부 애플리케이션은 규모 측정항목의 포즈 추정이 필요하므로 규모를 복구하기 위해 외부 깊이 추정기에 의존합니다. 본 논문에서는 3차원 카메라 공간에서 메트릭 일치성을 예측할 수 있는 키포인트 매칭 프로세스인 MicKey를 제안합니다. 이미지 전반에 걸쳐 3D 좌표 매칭을 학습함으로써 측정 기준을 추론할 수 있습니다.
 단일 카드는 듀얼 카드보다 Llama를 70B 더 빠르게 실행합니다. Microsoft는 A100에 FP6을 넣었습니다 |
Apr 29, 2024 pm 04:55 PM
단일 카드는 듀얼 카드보다 Llama를 70B 더 빠르게 실행합니다. Microsoft는 A100에 FP6을 넣었습니다 |
Apr 29, 2024 pm 04:55 PM
FP8 이하의 부동 소수점 수량화 정밀도는 더 이상 H100의 "특허"가 아닙니다! Lao Huang은 모든 사람이 INT8/INT4를 사용하기를 원했고 Microsoft DeepSpeed 팀은 NVIDIA의 공식 지원 없이 A100에서 FP6을 실행하기 시작했습니다. 테스트 결과에 따르면 A100에 대한 새로운 방법 TC-FPx의 FP6 양자화는 INT4에 가깝거나 때로는 더 빠르며 후자보다 정확도가 더 높은 것으로 나타났습니다. 또한 오픈 소스로 제공되고 DeepSpeed와 같은 딥 러닝 추론 프레임워크에 통합된 엔드투엔드 대규모 모델 지원도 있습니다. 이 결과는 대형 모델 가속화에도 즉각적인 영향을 미칩니다. 이 프레임워크에서는 단일 카드를 사용하여 Llama를 실행하면 처리량이 듀얼 카드보다 2.65배 더 높습니다. 하나
