

OpenCV를 사용하여 Python에서 HDR 이미징 HDR을 얻는 방법

1 背景
1.1 什么是高动态范围(HDR)成像?
大多数数码相机和显示器将彩色图像捕获或显示为24位矩阵。由于每个颜色通道具有8位,而共有三个通道,因此每个通道的像素值范围是0至255。换句话说,普通相机或显示器具有有限的动态范围。
然而,我们周围的世界颜色有一个非常大的变化范围。当灯关闭时,车库会变黑;太阳照射下,车库看起来变得非常明亮。即使忽略极端情况,八位在常规情况下也几乎无法完全捕捉场景。因此,相机会尝试估计光线并自动设置曝光,以使图像中最有用的部分具有良好的动态颜色范围,而太暗和太亮的部分分别被设置为0和255。
在下图中,左侧的图像是正常曝光的图像。请注意,背景中的天空已完全消失,因为相机决定使用一个能够让小孩被正确拍摄而明亮的天空被忽略的设置。右侧图像是iPhone生成的HDR图像。

iPhone通过在三种不同的曝光下拍摄三张图片来捕获HDR图像。图像是连续快速拍摄的,因此三次拍摄之间几乎没有偏移。然后组合三个图像以产生HDR图像。
1.2 高动态范围(HDR)成像如何工作?
在本节中,我们将介绍使用OpenCV创建HDR图像的步骤。
1)使用不同曝光设置拍摄多张图像
当我们在使用相机拍摄时,每个通道只有8位用于表示场景的动态范围(亮度范围)。但是我们可以通过改变快门速度在不同曝光下拍摄场景的多个图像。大多数单反相机都有一个称为自动包围曝光(AEB)的功能,只需按一下按钮,我们就可以在不同曝光下拍摄多张照片。在相机上使用AEB或在手机上使用自动包围应用程序,我们可以一个接一个地快速拍摄多张照片,因此场景不会改变。若要在iPhone上使用HDR模式,则需要拍摄三张照片(对于安卓手机则可下载超级相机应用程序实现此功能)。
1曝光不足的图像:此图片比正确的曝光图像暗。目标是拍摄非常明亮的图像部分。
2正确曝光的图像:这是相机根据估计的照明度拍摄的常规图像。
3过度曝光的图像:此图片比正确的曝光图像亮。目标是捕捉非常黑暗的图像部分。
当场景的动态范围非常大时,我们可以采用拍摄三张或更多照片的方法来生成HDR图像。在本教程中,我们将使用曝光时间为1/30,0.25,2.5和15秒拍摄的4张图像。缩略图如下所示。

通常,与SLR相机或手机相关的曝光时间和其他设置的信息会被储存在JPEG文件的EXIF元数据中。您可以通过以下链接学习如何查看存储在Windows和Mac中的JPEG文件中的EXIF元数据。
windows下右键图片-属性-详细信息,有图像具体信息。如下所示:
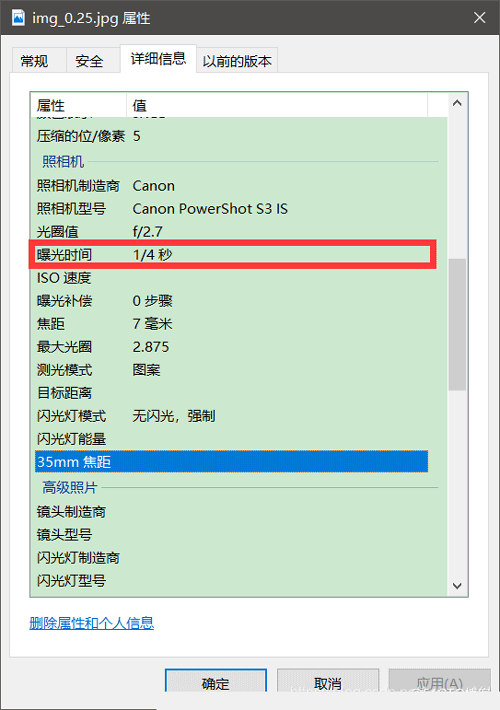
或者,您可以使用我最喜欢的名为EXIFTOOL的EXIF命令行实用程序。
2 代码
2.1 运行环境配置
由于本文所用代码涉及到opencv非免费代码,createTonemapMantiuk这部分算法都是申请专利需要收费(本文可以不要这段代码)。在使用时编译opencv和opencv_contrib需要选择OPENCV_ENABLE_NONFREE。
如果是python,直接安装指定版本opencv就行了:
pip install opencv-contrib-python==3.4.2.17
在使用非免费代码
头文件和命名空间如下:
#include <opencv2/xphoto.hpp> using namespace xphoto;
2.2 读取图像和曝光时间
手动输入图像,曝光时间以及图像个数。
代码如下: C++:
/**
* @brief 读图
*
* @param images
* @param times
*/
void readImagesAndTimes(vector<Mat> &images, vector<float> ×)
{
//图像个数
int numImages = 3;
//图像曝光时间
static const float timesArray[] = { 1.0 / 25 ,1.0 / 17, 1.0 / 13 };
times.assign(timesArray, timesArray + numImages);
static const char* filenames[] = { "1_25.jpg", "1_17.jpg", "1_13.jpg"};
//读取图像
for (int i = 0; i < numImages; i++)
{
Mat im = imread(filenames[i]);
images.push_back(im);
}
}python:
def readImagesAndTimes():
# List of exposure times
times = np.array([ 1/30.0, 0.25, 2.5, 15.0 ], dtype=np.float32)
# List of image filenames
filenames = ["img_0.033.jpg", "img_0.25.jpg", "img_2.5.jpg", "img_15.jpg"]
images = []
for filename in filenames:
im = cv2.imread(filename)
images.append(im)
return images, times2.3 图像对齐
用于合成HDR图像的原始图像未对准可能导致严重的伪影。在下图中,左侧图像是使用未对齐图像组成的HDR图像,右侧图像是使用对齐图像的图像。我们在左侧图像中发现了明显的重叠缺陷,这是通过放大图像的一部分并使用红色圆圈进行标识得出的。

当然,在拍摄用于创建HDR图像的照片时,专业摄影师将相机安装在三脚架上。他们还使用一种称为反光镜锁死的功能来减少额外的振动。即使这样,图像也可能无法完美对齐,因为无法保证无振动的环境。使用手持相机或手机拍摄图像时,对齐问题会变得更糟。
OpenCV 提供了一个简单的AlignMTB方法,可以幸运地对齐这些图像。所有图像都会被转换为中值阈值位图(MTB)格式,这是由该算法完成的。图像的MTB生成方式为将比中值亮度亮的点分配为1,其余为0。MTB不随曝光时间的改变而改变。因此不需要我们指定曝光时间就可以对齐MTB。
代码如下:
C++:
// Align input images Ptr<AlignMTB> alignMTB = createAlignMTB(); alignMTB->process(images, images);
python:
# Align input images alignMTB = cv2.createAlignMTB() alignMTB.process(images, images)
2.4 恢复相机响应功能
典型相机的响应与场景亮度不是线性的。如果一个摄像机拍摄到两个物体,其中一个物体的亮度是另一个物体在现实世界中的两倍,那么这句话的意思是什么?。当您测量照片中两个对象的像素强度时,较亮对象的像素值将不会是较暗对象的两倍。如果不考虑相机的响应函数(CRF),就无法将多张图像合并为一个HDR图像。将多个曝光图像合并为HDR图像意味着什么?
在图像的某个位置(x,y)仅考虑一个像素。如果CRF是线性的,则像素值将与曝光时间成正比,除非像素在特定图像中太暗(即接近0)或太亮(即接近255)。我们可以过滤出这些不好的像素(太暗或太亮),并且将像素值除以曝光时间来估计像素的亮度,然后在像素不差的所有图像(太暗或太亮)上对亮度值取平均。我们可以对所有像素进行这样的处理,并通过对“好”像素进行平均来获得所有像素的单张图像。但是CRF不是线性的,我们需要在评估CRF前把图像强度变成线性。
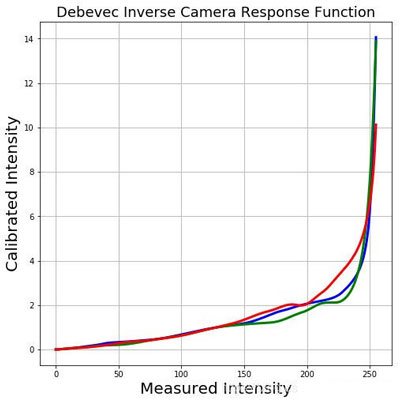
好消息是,如果我们知道每张图像的曝光时间,可以从图像中估算CRF。与计算机视觉中的许多问题一样,找到CRF的问题被设置为优化问题,其中目标是最小化由数据项和平滑项组成的目标函数。这些问题通常会减少到使用奇异值分解(SVD)求解的线性最小二乘问题,而奇异值分解是所有线性代数包的一部分。CRF恢复算法细节见论文Recovering High Dynamic Range Radiance Maps from Photographs。
使用CalibrateDebevec或在OpenCV中仅使用两行代码来查找CRF CalibrateRobertson。在本教程中我们将使用CalibrateDebevec。
代码如下:
C++:
// Obtain Camera Response Function (CRF) Mat responseDebevec; Ptr<CalibrateDebevec> calibrateDebevec = createCalibrateDebevec(); calibrateDebevec->process(images, responseDebevec, times);
python:
# Obtain Camera Response Function (CRF) calibrateDebevec = cv2.createCalibrateDebevec() responseDebevec = calibrateDebevec.process(images, times)
下图显示了使用红色,绿色和蓝色通道图像恢复的CRF。
2.5 合并图像
当我们完成对CRF的估计时,便可以将曝光图像合并为一个HDR图像,即MergeDebevec算法。C ++和Python代码如下所示。
C++:
// Merge images into an HDR linear image
Mat hdrDebevec;
Ptr<MergeDebevec> mergeDebevec = createMergeDebevec();
mergeDebevec->process(images, hdrDebevec, times, responseDebevec);
// Save HDR image.
imwrite("hdrDebevec.hdr", hdrDebevec);Python:
# Merge images into an HDR linear image
mergeDebevec = cv2.createMergeDebevec()
hdrDebevec = mergeDebevec.process(images, times, responseDebevec)
# Save HDR image.
cv2.imwrite("hdrDebevec.hdr", hdrDebevec)上面保存的HDR图像可以在Photoshop中加载并进行色调映射。一个例子如下所示。

2.6 色调映射
现在我们将曝光图像合并为一个HDR图像。你能猜出这张图片的最小和最大像素值吗?对于漆黑条件,最小值显然为0。什么是理论最大值?无穷!实际上,不同情况下的最大值是不同的。如果场景包含非常明亮的光源,我们将看到非常大的最大值。我们已经利用多个图像恢复了相对亮度信息,但我们现在的难点在于将其编码为24位图像以便于显示。
色调映射:将高动态范围(HDR)图像转换为每通道8位图像同时保留尽可能多的细节的过程称为色调映射。
有几种色调映射算法。OpenCV实现了其中的四个。要记住的是,没有正确的方法来进行色调映射。通常,我们希望在色调映射图像中看到比在任何一个曝光图像中更多的细节。有时,色调映射的目标是产生逼真的图像,并且通常目标是产生超现实的图像。OpenCV实现的算法偏向于生成逼真的结果,因此可能不太引人注目。
我们来看看各种选项。下面列出了不同色调映射算法的一些常见参数。
1)伽马gamma:此参数通过应用伽马校正来压缩动态范围。当gamma等于1时,不应用校正。小于1的灰度会使图像变暗,而大于1的灰度会使图像变亮。
2)饱和度saturation:此参数用于增加或减少饱和度。当饱和度高时,颜色更丰富,更强烈。饱和度值接近零,使颜色渐渐变为灰度。
3)对比度contrast:控制输出图像的对比度(即log(maxPixelValue / minPixelValue))。
让我们来探索OpenCV中可用的四种色调映射算法
Drago Tonemap
Drago Tonemap的参数如下所示:
createTonemapDrago ( float gamma = 1.0f, float saturation = 1.0f, float bias = 0.85f )
这里,bias是[0,1]范围内偏置函数的值。从0.7到0.9的值通常会得到最好的结果。默认值为0.85。有关更多技术细节,请参阅此文章。参数通过反复试验获得。最终输出乘以3只是因为它给出了最令人满意的结果。更多的技术细节见:
结果如下所示:

Durand Tonemap
Durand Tonemap的参数如下所示:
createTonemapDurand ( float gamma = 1.0f, float contrast = 4.0f, float saturation = 1.0f, float sigma_space = 2.0f, float sigma_color = 2.0f );
该算法基于将图像分解为基础层和细节层。使用称为双边滤波器的边缘保留滤波器获得基础层。双边滤波器中的参数sigma_space和sigma_color分别影响空间域和颜色域的平滑程度。更多的技术细节见:
结果如下所示:

Reinhard Tonemap
Reinhard Tonemap的参数如下所示:
createTonemapReinhard ( float gamma = 1.0f, float intensity = 0.0f, float light_adapt = 1.0f, float color_adapt = 0.0f )
参数intensity应在[-8,8]范围内。强度值越大,结果越明亮。参数light_adapt控制灯光适应并且在[0,1]范围内。值1表示仅基于像素值的自适应,值0表示全局自适应。中间值可以用于两者的加权组合。参数color_adapt控制色度适应并且在[0,1]范围内。当值为1时,通道单独处理;当值为0时,所有通道适应级别相同。中间值可用于两者的加权组合。更多的技术细节见:
结果如下所示:

Mantiuk Tonemap
Mantiuk Tonemap的参数如下所示:
createTonemapMantiuk ( float gamma = 1.0f, float scale = 0.7f, float saturation = 1.0f )
scale是对比度比例因子。从0.6到0.9的值产生最佳结果。更多的技术细节见:
结果如下所示:

上面所有色调映射代码见:
C++:
// Tonemap using Drago's method to obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Drago's method ... ";
Mat ldrDrago;
Ptr<TonemapDrago> tonemapDrago = createTonemapDrago(1.0, 0.7);
tonemapDrago->process(hdrDebevec, ldrDrago);
ldrDrago = 3 * ldrDrago;
imwrite("ldr-Drago.jpg", ldrDrago * 255);
cout << "saved ldr-Drago.jpg" << endl;
// Tonemap using Durand's method obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Durand's method ... ";
Mat ldrDurand;
Ptr<TonemapDurand> tonemapDurand = createTonemapDurand(1.5, 4, 1.0, 1, 1);
tonemapDurand->process(hdrDebevec, ldrDurand);
ldrDurand = 3 * ldrDurand;
imwrite("ldr-Durand.jpg", ldrDurand * 255);
cout << "saved ldr-Durand.jpg" << endl;
// Tonemap using Reinhard's method to obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Reinhard's method ... ";
Mat ldrReinhard;
Ptr<TonemapReinhard> tonemapReinhard = createTonemapReinhard(1.5, 0, 0, 0);
tonemapReinhard->process(hdrDebevec, ldrReinhard);
imwrite("ldr-Reinhard.jpg", ldrReinhard * 255);
cout << "saved ldr-Reinhard.jpg" << endl;
// Tonemap using Mantiuk's method to obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Mantiuk's method ... ";
Mat ldrMantiuk;
Ptr<TonemapMantiuk> tonemapMantiuk = createTonemapMantiuk(2.2, 0.85, 1.2);
tonemapMantiuk->process(hdrDebevec, ldrMantiuk);
ldrMantiuk = 3 * ldrMantiuk;
imwrite("ldr-Mantiuk.jpg", ldrMantiuk * 255);
cout << "saved ldr-Mantiuk.jpg" << endl;Python:
# Tonemap using Drago's method to obtain 24-bit color image
print("Tonemaping using Drago's method ... ")
tonemapDrago = cv2.createTonemapDrago(1.0, 0.7)
ldrDrago = tonemapDrago.process(hdrDebevec)
ldrDrago = 3 * ldrDrago
cv2.imwrite("ldr-Drago.jpg", ldrDrago * 255)
print("saved ldr-Drago.jpg")
# Tonemap using Durand's method obtain 24-bit color image
print("Tonemaping using Durand's method ... ")
tonemapDurand = cv2.createTonemapDurand(1.5,4,1.0,1,1)
ldrDurand = tonemapDurand.process(hdrDebevec)
ldrDurand = 3 * ldrDurand
cv2.imwrite("ldr-Durand.jpg", ldrDurand * 255)
print("saved ldr-Durand.jpg")
# Tonemap using Reinhard's method to obtain 24-bit color image
print("Tonemaping using Reinhard's method ... ")
tonemapReinhard = cv2.createTonemapReinhard(1.5, 0,0,0)
ldrReinhard = tonemapReinhard.process(hdrDebevec)
cv2.imwrite("ldr-Reinhard.jpg", ldrReinhard * 255)
print("saved ldr-Reinhard.jpg")
# Tonemap using Mantiuk's method to obtain 24-bit color image
print("Tonemaping using Mantiuk's method ... ")
tonemapMantiuk = cv2.createTonemapMantiuk(2.2,0.85, 1.2)
ldrMantiuk = tonemapMantiuk.process(hdrDebevec)
ldrMantiuk = 3 * ldrMantiuk
cv2.imwrite("ldr-Mantiuk.jpg", ldrMantiuk * 255)
print("saved ldr-Mantiuk.jpg")2.7 工程代码
本文所有代码见:
C++:
#include "pch.h"
#include <opencv2/opencv.hpp>
#include <opencv2/xphoto.hpp>
#include <vector>
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
using namespace xphoto;
/**
* @brief 读图
*
* @param images
* @param times
*/
void readImagesAndTimes(vector<Mat> &images, vector<float> ×)
{
//图像个数
int numImages = 3;
//图像曝光时间
static const float timesArray[] = { 1.0 / 25 ,1.0 / 17, 1.0 / 13 };
times.assign(timesArray, timesArray + numImages);
static const char* filenames[] = { "1_25.jpg", "1_17.jpg", "1_13.jpg"};
//读取图像
for (int i = 0; i < numImages; i++)
{
Mat im = imread(filenames[i]);
images.push_back(im);
}
}
int main()
{
// Read images and exposure times 读取图像和图像曝光时间
cout << "Reading images ... " << endl;
//图像
vector<Mat> images;
//曝光时间
vector<float> times;
//读取图像和图像曝光时间
readImagesAndTimes(images, times);
// Align input images 图像对齐
cout << "Aligning images ... " << endl;
Ptr<AlignMTB> alignMTB = createAlignMTB();
alignMTB->process(images, images);
// Obtain Camera Response Function (CRF) 获得CRF
cout << "Calculating Camera Response Function (CRF) ... " << endl;
Mat responseDebevec;
Ptr<CalibrateDebevec> calibrateDebevec = createCalibrateDebevec();
calibrateDebevec->process(images, responseDebevec, times);
// Merge images into an HDR linear image 图像合并为HDR图像
cout << "Merging images into one HDR image ... ";
Mat hdrDebevec;
Ptr<MergeDebevec> mergeDebevec = createMergeDebevec();
mergeDebevec->process(images, hdrDebevec, times, responseDebevec);
// Save HDR image. 保存HDR图像
imwrite("hdrDebevec.hdr", hdrDebevec);
cout << "saved hdrDebevec.hdr " << endl;
// Tonemap using Drago's method to obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Drago's method ... ";
Mat ldrDrago;
Ptr<TonemapDrago> tonemapDrago = createTonemapDrago(1.0, 0.7);
tonemapDrago->process(hdrDebevec, ldrDrago);
ldrDrago = 3 * ldrDrago;
imwrite("ldr-Drago.jpg", ldrDrago * 255);
cout << "saved ldr-Drago.jpg" << endl;
// Tonemap using Durand's method obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Durand's method ... ";
Mat ldrDurand;
Ptr<TonemapDurand> tonemapDurand = createTonemapDurand(1.5, 4, 1.0, 1, 1);
tonemapDurand->process(hdrDebevec, ldrDurand);
ldrDurand = 3 * ldrDurand;
imwrite("ldr-Durand.jpg", ldrDurand * 255);
cout << "saved ldr-Durand.jpg" << endl;
// Tonemap using Reinhard's method to obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Reinhard's method ... ";
Mat ldrReinhard;
Ptr<TonemapReinhard> tonemapReinhard = createTonemapReinhard(1.5, 0, 0, 0);
tonemapReinhard->process(hdrDebevec, ldrReinhard);
imwrite("ldr-Reinhard.jpg", ldrReinhard * 255);
cout << "saved ldr-Reinhard.jpg" << endl;
// Tonemap using Mantiuk's method to obtain 24-bit color image 色调映射算法
cout << "Tonemaping using Mantiuk's method ... ";
Mat ldrMantiuk;
Ptr<TonemapMantiuk> tonemapMantiuk = createTonemapMantiuk(2.2, 0.85, 1.2);
tonemapMantiuk->process(hdrDebevec, ldrMantiuk);
ldrMantiuk = 3 * ldrMantiuk;
imwrite("ldr-Mantiuk.jpg", ldrMantiuk * 255);
cout << "saved ldr-Mantiuk.jpg" << endl;
return 0;
}Python:
import cv2
import numpy as np
def readImagesAndTimes():
times = np.array([ 1/30.0, 0.25, 2.5, 15.0 ], dtype=np.float32)
filenames = ["img_0.033.jpg", "img_0.25.jpg", "img_2.5.jpg", "img_15.jpg"]
images = []
for filename in filenames:
im = cv2.imread(filename)
images.append(im)
return images, times
if __name__ == '__main__':
# Read images and exposure times
print("Reading images ... ")
images, times = readImagesAndTimes()
# Align input images
print("Aligning images ... ")
alignMTB = cv2.createAlignMTB()
alignMTB.process(images, images)
# Obtain Camera Response Function (CRF)
print("Calculating Camera Response Function (CRF) ... ")
calibrateDebevec = cv2.createCalibrateDebevec()
responseDebevec = calibrateDebevec.process(images, times)
# Merge images into an HDR linear image
print("Merging images into one HDR image ... ")
mergeDebevec = cv2.createMergeDebevec()
hdrDebevec = mergeDebevec.process(images, times, responseDebevec)
# Save HDR image.
cv2.imwrite("hdrDebevec.hdr", hdrDebevec)
print("saved hdrDebevec.hdr ")
# Tonemap using Drago's method to obtain 24-bit color image
print("Tonemaping using Drago's method ... ")
tonemapDrago = cv2.createTonemapDrago(1.0, 0.7)
ldrDrago = tonemapDrago.process(hdrDebevec)
ldrDrago = 3 * ldrDrago
cv2.imwrite("ldr-Drago.jpg", ldrDrago * 255)
print("saved ldr-Drago.jpg")
# Tonemap using Durand's method obtain 24-bit color image
print("Tonemaping using Durand's method ... ")
tonemapDurand = cv2.createTonemapDurand(1.5,4,1.0,1,1)
ldrDurand = tonemapDurand.process(hdrDebevec)
ldrDurand = 3 * ldrDurand
cv2.imwrite("ldr-Durand.jpg", ldrDurand * 255)
print("saved ldr-Durand.jpg")
# Tonemap using Reinhard's method to obtain 24-bit color image
print("Tonemaping using Reinhard's method ... ")
tonemapReinhard = cv2.createTonemapReinhard(1.5, 0,0,0)
ldrReinhard = tonemapReinhard.process(hdrDebevec)
cv2.imwrite("ldr-Reinhard.jpg", ldrReinhard * 255)
print("saved ldr-Reinhard.jpg")
# Tonemap using Mantiuk's method to obtain 24-bit color image
print("Tonemaping using Mantiuk's method ... ")
tonemapMantiuk = cv2.createTonemapMantiuk(2.2,0.85, 1.2)
ldrMantiuk = tonemapMantiuk.process(hdrDebevec)
ldrMantiuk = 3 * ldrMantiuk
cv2.imwrite("ldr-Mantiuk.jpg", ldrMantiuk * 255)
print("saved ldr-Mantiuk.jpg")위 내용은 OpenCV를 사용하여 Python에서 HDR 이미징 HDR을 얻는 방법의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7467
7467
 15
1376
52
77
11
48
19
19
20
15
1376
52
77
11
48
19
19
20

 MySQL은 지불해야합니다
Apr 08, 2025 pm 05:36 PM
MySQL은 지불해야합니다
Apr 08, 2025 pm 05:36 PM
MySQL에는 무료 커뮤니티 버전과 유료 엔터프라이즈 버전이 있습니다. 커뮤니티 버전은 무료로 사용 및 수정할 수 있지만 지원은 제한되어 있으며 안정성이 낮은 응용 프로그램에 적합하며 기술 기능이 강합니다. Enterprise Edition은 안정적이고 신뢰할 수있는 고성능 데이터베이스가 필요하고 지원 비용을 기꺼이 지불하는 응용 프로그램에 대한 포괄적 인 상업적 지원을 제공합니다. 버전을 선택할 때 고려 된 요소에는 응용 프로그램 중요도, 예산 책정 및 기술 기술이 포함됩니다. 완벽한 옵션은없고 가장 적합한 옵션 만 있으므로 특정 상황에 따라 신중하게 선택해야합니다.
 설치 후 MySQL을 사용하는 방법
Apr 08, 2025 am 11:48 AM
설치 후 MySQL을 사용하는 방법
Apr 08, 2025 am 11:48 AM
이 기사는 MySQL 데이터베이스의 작동을 소개합니다. 먼저 MySQLworkBench 또는 명령 줄 클라이언트와 같은 MySQL 클라이언트를 설치해야합니다. 1. MySQL-Uroot-P 명령을 사용하여 서버에 연결하고 루트 계정 암호로 로그인하십시오. 2. CreateABase를 사용하여 데이터베이스를 작성하고 데이터베이스를 선택하십시오. 3. CreateTable을 사용하여 테이블을 만들고 필드 및 데이터 유형을 정의하십시오. 4. InsertInto를 사용하여 데이터를 삽입하고 데이터를 쿼리하고 업데이트를 통해 데이터를 업데이트하고 DELETE를 통해 데이터를 삭제하십시오. 이러한 단계를 마스터하고 일반적인 문제를 처리하는 법을 배우고 데이터베이스 성능을 최적화하면 MySQL을 효율적으로 사용할 수 있습니다.
 다운로드 후 MySQL을 설치할 수 없습니다
Apr 08, 2025 am 11:24 AM
다운로드 후 MySQL을 설치할 수 없습니다
Apr 08, 2025 am 11:24 AM
MySQL 설치 실패의 주된 이유는 다음과 같습니다. 1. 권한 문제, 관리자로 실행하거나 Sudo 명령을 사용해야합니다. 2. 종속성이 누락되었으며 관련 개발 패키지를 설치해야합니다. 3. 포트 충돌, 포트 3306을 차지하는 프로그램을 닫거나 구성 파일을 수정해야합니다. 4. 설치 패키지가 손상되어 무결성을 다운로드하여 확인해야합니다. 5. 환경 변수가 잘못 구성되었으며 운영 체제에 따라 환경 변수를 올바르게 구성해야합니다. 이러한 문제를 해결하고 각 단계를 신중하게 확인하여 MySQL을 성공적으로 설치하십시오.
 MySQL 다운로드 파일이 손상되어 설치할 수 없습니다. 수리 솔루션
Apr 08, 2025 am 11:21 AM
MySQL 다운로드 파일이 손상되어 설치할 수 없습니다. 수리 솔루션
Apr 08, 2025 am 11:21 AM
MySQL 다운로드 파일은 손상되었습니다. 어떻게해야합니까? 아아, mySQL을 다운로드하면 파일 손상을 만날 수 있습니다. 요즘 정말 쉽지 않습니다! 이 기사는 모든 사람이 우회를 피할 수 있도록이 문제를 해결하는 방법에 대해 이야기합니다. 읽은 후 손상된 MySQL 설치 패키지를 복구 할 수있을뿐만 아니라 향후에 갇히지 않도록 다운로드 및 설치 프로세스에 대해 더 깊이 이해할 수 있습니다. 파일 다운로드가 손상된 이유에 대해 먼저 이야기합시다. 이에 대한 많은 이유가 있습니다. 네트워크 문제는 범인입니다. 네트워크의 다운로드 프로세스 및 불안정성의 중단으로 인해 파일 손상이 발생할 수 있습니다. 다운로드 소스 자체에도 문제가 있습니다. 서버 파일 자체가 고장 났으며 물론 다운로드하면 고장됩니다. 또한 일부 안티 바이러스 소프트웨어의 과도한 "열정적 인"스캔으로 인해 파일 손상이 발생할 수 있습니다. 진단 문제 : 파일이 실제로 손상되었는지 확인하십시오
 MySQL 설치 후 시작할 수없는 서비스에 대한 솔루션
Apr 08, 2025 am 11:18 AM
MySQL 설치 후 시작할 수없는 서비스에 대한 솔루션
Apr 08, 2025 am 11:18 AM
MySQL이 시작을 거부 했습니까? 당황하지 말고 확인합시다! 많은 친구들이 MySQL을 설치 한 후 서비스를 시작할 수 없다는 것을 알았으며 너무 불안했습니다! 걱정하지 마십시오.이 기사는 침착하게 다루고 그 뒤에있는 마스터 마인드를 찾을 수 있습니다! 그것을 읽은 후에는이 문제를 해결할뿐만 아니라 MySQL 서비스에 대한 이해와 문제 해결 문제에 대한 아이디어를 향상시키고보다 강력한 데이터베이스 관리자가 될 수 있습니다! MySQL 서비스는 시작되지 않았으며 간단한 구성 오류에서 복잡한 시스템 문제에 이르기까지 여러 가지 이유가 있습니다. 가장 일반적인 측면부터 시작하겠습니다. 기본 지식 : 서비스 시작 프로세스 MySQL 서비스 시작에 대한 간단한 설명. 간단히 말해서 운영 체제는 MySQL 관련 파일을로드 한 다음 MySQL 데몬을 시작합니다. 여기에는 구성이 포함됩니다
 MySQL 설치 후 데이터베이스 성능을 최적화하는 방법
Apr 08, 2025 am 11:36 AM
MySQL 설치 후 데이터베이스 성능을 최적화하는 방법
Apr 08, 2025 am 11:36 AM
MySQL 성능 최적화는 설치 구성, 인덱싱 및 쿼리 최적화, 모니터링 및 튜닝의 세 가지 측면에서 시작해야합니다. 1. 설치 후 innodb_buffer_pool_size 매개 변수와 같은 서버 구성에 따라 my.cnf 파일을 조정해야합니다. 2. 과도한 인덱스를 피하기 위해 적절한 색인을 작성하고 Execution 명령을 사용하여 실행 계획을 분석하는 것과 같은 쿼리 문을 최적화합니다. 3. MySQL의 자체 모니터링 도구 (showprocesslist, showstatus)를 사용하여 데이터베이스 건강을 모니터링하고 정기적으로 백업 및 데이터베이스를 구성하십시오. 이러한 단계를 지속적으로 최적화함으로써 MySQL 데이터베이스의 성능을 향상시킬 수 있습니다.
 MySQL은 인터넷이 필요합니까?
Apr 08, 2025 pm 02:18 PM
MySQL은 인터넷이 필요합니까?
Apr 08, 2025 pm 02:18 PM
MySQL은 기본 데이터 저장 및 관리를위한 네트워크 연결없이 실행할 수 있습니다. 그러나 다른 시스템과의 상호 작용, 원격 액세스 또는 복제 및 클러스터링과 같은 고급 기능을 사용하려면 네트워크 연결이 필요합니다. 또한 보안 측정 (예 : 방화벽), 성능 최적화 (올바른 네트워크 연결 선택) 및 데이터 백업은 인터넷에 연결하는 데 중요합니다.
 고로드 애플리케이션의 MySQL 성능을 최적화하는 방법은 무엇입니까?
Apr 08, 2025 pm 06:03 PM
고로드 애플리케이션의 MySQL 성능을 최적화하는 방법은 무엇입니까?
Apr 08, 2025 pm 06:03 PM
MySQL 데이터베이스 성능 최적화 안내서 리소스 집약적 응용 프로그램에서 MySQL 데이터베이스는 중요한 역할을 수행하며 대규모 트랜잭션 관리를 담당합니다. 그러나 응용 프로그램 규모가 확장됨에 따라 데이터베이스 성능 병목 현상은 종종 제약이됩니다. 이 기사는 일련의 효과적인 MySQL 성능 최적화 전략을 탐색하여 응용 프로그램이 고 부하에서 효율적이고 반응이 유지되도록합니다. 실제 사례를 결합하여 인덱싱, 쿼리 최적화, 데이터베이스 설계 및 캐싱과 같은 심층적 인 주요 기술을 설명합니다. 1. 데이터베이스 아키텍처 설계 및 최적화 된 데이터베이스 아키텍처는 MySQL 성능 최적화의 초석입니다. 몇 가지 핵심 원칙은 다음과 같습니다. 올바른 데이터 유형을 선택하고 요구 사항을 충족하는 가장 작은 데이터 유형을 선택하면 저장 공간을 절약 할 수있을뿐만 아니라 데이터 처리 속도를 향상시킬 수 있습니다.
