
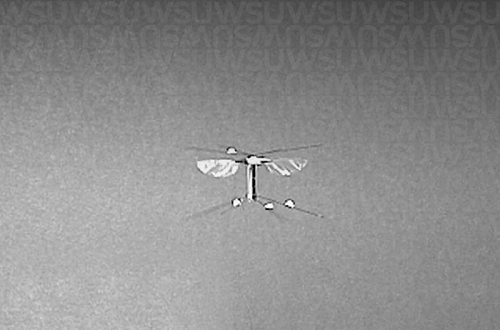
연구원들이 모든 방향으로 완전히 날 수 있는 로봇 꿀벌을 만듭니다. 이미지 출처: 워싱턴 주립대학교
과학기술일보 장멍그란 기자
미국 워싱턴 주립대학교 연구진이 모든 방향으로 안정적으로 비행할 수 있는 로봇 벌을 개발했습니다. 이번 연구 결과는 'IEEE Transactions on Robotics' 최신호에 게재됐다.
이 Bee++ 프로토타입에는 탄소섬유와 Mylar로 제작된 4개의 날개와 날개를 제어하는 4개의 경량 액추에이터가 있어 모든 방향에서 안정적인 비행이 가능한 최초의 프로토타입입니다. 벌
++ 일반적인 날아다니는 곤충이 나타내는 6도의 자유로운 움직임을 완벽하게 구현합니다.
30년 넘게 연구자들은 인공 비행 곤충을 개발하기 위해 노력해 왔습니다. 미래에는 인공 수분, 작은 공간에서의 수색 및 구조, 생물학적 연구 또는 열악한 환경 모니터링에 사용될 수 있습니다. 그러나 단순히 작은 로봇이 이륙하고 착륙하도록 하려면 곤충의 두뇌처럼 기능하는 컨트롤러를 개발해야 합니다.
연구원들은 처음에 양날개 로봇 꿀벌을 개발했지만 움직임이 제한되었습니다. 피칭 또는 롤링 동작을 수행하기 위해 연구원들은 피칭을 위해 앞날개 플랩을 뒷날개와 다르게, 오른쪽 날개 플랩을 롤링을 위해 왼쪽 날개와 다르게 사용하여 샤프트 회전 토크를 따라 로봇을 움직이는 두 가지 주요 레벨을 만들었습니다. .
복잡한 비틀림 동작을 제어할 수 있는 능력은 매우 중요합니다. 그것이 없으면 로봇은 통제력을 잃고 한 지점에 집중할 수 없습니다. 모든 각도의 움직임을 갖는 것은 회피 기동이나 물체 추적에도 중요합니다.
로봇이 제어 가능한 방식으로 비틀도록 하기 위해 연구원들은 곤충의 신호를 받아 날개가 경사면에서 펄럭이도록 움직였습니다. 그들은 로봇이 초당 날개를 진동시키는 빈도를 초당 100회에서 160회로 증가시켰습니다.
실제 꿀벌은 꿀벌++보다 약 10mg 더 무겁고, 무게는 약 105mg이며, 날개 길이는 33mm입니다. 실제 곤충과 달리 한 번에 약 5분 동안만 자율적으로 비행할 수 있습니다.
텍스트 출처: Science and Technology Daily
위 내용은 생체공학 기계곤충이 실현됩니다! 꿀벌 드론의 무게는 0.1g 미만입니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!


















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



