

실제 사람이 당신을 진심으로 안아줄 수 없을 때 로봇이 조치를 취할 것입니다.

누구에게나 감정을 느끼는 순간이 있지만 모든 사람이 포옹할 사람을 찾을 수는 없습니다.
이 문제점은 과학자 알렉시스 블록(이하 블록)도 목격했습니다. 2017년부터 그녀는 로봇에게 포옹을 가르치는 방법을 연구해 왔습니다. 그녀는 나중에 37명의 노벨상 수상자를 배출한 유명한 독일의 "막스 플랑크 학교"의 회원이 되었습니다.
이 프로젝트는 그리 쉽지 않습니다. 이 로봇을 6년 동안 만들어 왔기 때문에 춥지도 않고, 매우 인간적입니다:
- 사람들이 다가가면 팔을 치켜들고 "안아봐도 될까요?"라고 열정적으로 물어봅니다. 사람의 키에 따라 스스로 조정하여 딱 맞는 포옹을 선사합니다. 또한 다양한 '압착' 강도를 조정하여 더욱 다정하게 포옹할 수 있습니다.
- 다양한 포옹 자세에도 반응할 수 있습니다. 예를 들어, 사람들이 잠시 포옹하고 싶어하면 이를 이해하고 미리 로봇 팔을 놓지 않을 것입니다...
 이런 포옹이 얼마나 현실적인가요?
이런 포옹이 얼마나 현실적인가요?
더 놀라운 점은 모두가 로봇이 안아주는 느낌에 대해 이야기할 때 모두 “애인을 안아준다”, “엄마가 안아준다” 등 구체적인 반응을 보였고, 상대방도 그런 것 같았다. "장례식에 온 사람". 먼 친척", "축구 경기에서 만난 친구", 심지어 "전 애인을 껴안는 것 같다"는 말도 있었습니다.
이러한 감정 서신의 차이는 당시 사람들의 심리 상태뿐만 아니라 각 재판에서 그들을 포옹하는 로봇의 행동과 정도와도 관련이 있습니다.
 그러나 이 모든 것은 막스 플랑크가 개발한 허기봇 3.0이 상당히 "인간과 유사"하다는 것을 보여줍니다.
그러나 이 모든 것은 막스 플랑크가 개발한 허기봇 3.0이 상당히 "인간과 유사"하다는 것을 보여줍니다.
막스 플랑크 연구소는 왜 로봇에게 포옹을 가르치는 걸까요?
인간은 피부와 피부의 접촉에 욕심이 많습니다.
우리는 어려서부터 부모님의 손에 이끌려 쓰다듬어주고, 안아주고, 마사지해 줄 때 호르몬이 분비되어 스트레스와 불안감이 크게 줄어들고, 심박수와 혈압도 낮아지면서 사람들과 긴밀한 접촉을 갖게 되었습니다. .
특히 3초 이상 지속되는 꽉 포옹은 피부 접촉의 즐거움을 더욱 높여줍니다. 이를 '깊은 지압 터치'라고도 합니다.
사람들은 "살아남기 위해 하루에 4번 포옹하고, 육체적, 정신적 건강을 위해 적어도 8번 포옹한다." 미국의 유명한 심리치료사인 버지니아 사티어(Virginia Satir)는 '4가지 포옹' 이론을 제안했습니다.
하지만 항상 동행할 수 있는 사람은 없기 때문에 이불로 몸을 단단히 감싸면 스스로 "깊은 압력 터치"를 얻을 수 있습니다.
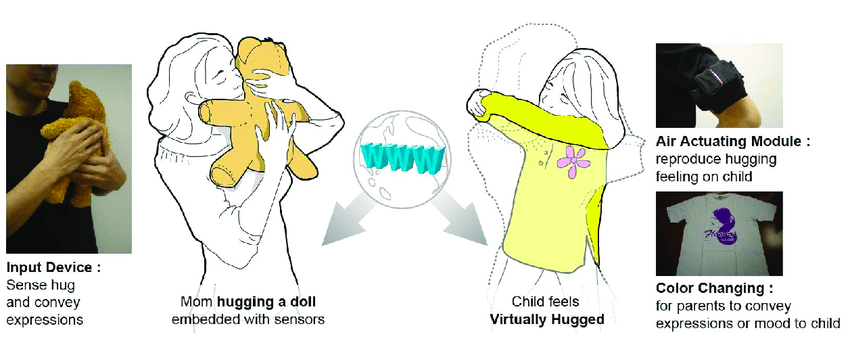
사람들은 기술이 동료애와 편안함의 격차를 메울 수 있기를 바랍니다.예를 들어, 한 팀은 촉각 정보를 수신할 수 있는 전자 손목 밴드를 만들었습니다. 휴대폰의 블루투스에 연결되어 한 사람이 클릭하여 정보를 보내면 다른 사람의 손에 있는 손목 밴드가 쥐어지고 진동합니다.
 한 팀은 또한 "허그 셔츠"를 발명했습니다. 이 옷에는 센서가 내장되어 있으며 자폐 스펙트럼 장애가 있는 어린이에게 사용됩니다. 부모가 인형의 한쪽 끝을 안으면 센서가 위치, 힘, 온도, 심지어 심장 박동까지 포착할 수 있습니다. , 가열, 진동 및 팽창의 형태로 상대방의 아이들이 그것을 느낄 수 있도록 합니다.
한 팀은 또한 "허그 셔츠"를 발명했습니다. 이 옷에는 센서가 내장되어 있으며 자폐 스펙트럼 장애가 있는 어린이에게 사용됩니다. 부모가 인형의 한쪽 끝을 안으면 센서가 위치, 힘, 온도, 심지어 심장 박동까지 포착할 수 있습니다. , 가열, 진동 및 팽창의 형태로 상대방의 아이들이 그것을 느낄 수 있도록 합니다.
 하지만 이것만으로는 충분하지 않습니다.
하지만 이것만으로는 충분하지 않습니다.
HuggieBot 개발자들은 사람들이 포옹, 특히 '터치 위치'와 '접촉 강도'의 두 가지 측면에 특히 민감하다는 사실을 발견했습니다.
두 사람이 감정적으로 가까울수록 접촉할 수 있는 영역이 더 많아지지만, 서로 가깝지 않은 사람들의 경우 잘못된 위치에서 포옹하는 것은 "공격적"이 되며 포옹은 충분히 강하지 않습니다. 쉽게 무식해 보일 수 있으며, 너무 많은 힘을 가하면 상대방이 다칠 수 있습니다. 그리고 이 강렬함의 느낌은 사람마다 다를 필요가 있습니다.
그래서 포옹 셔츠 등과 같은 발명품은 여전히 충분히 따뜻하고 실제적인 포옹을 회복할 수 없습니다.
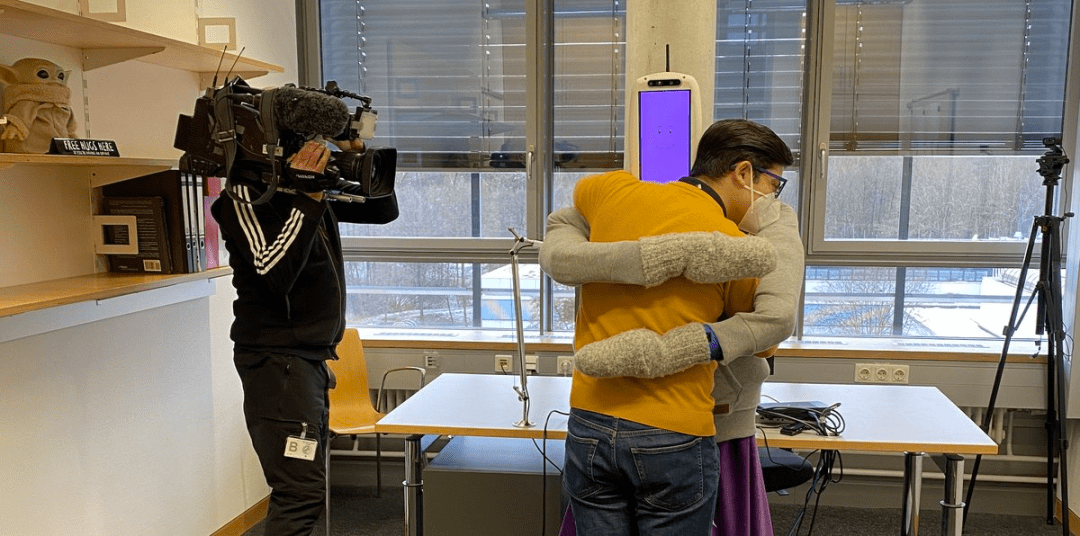
특히 전염병을 경험한 후 사람들의 정서적 연결은 거리와 장애물로 인해 더욱 취약해졌으며 포옹에 대한 열망이 더욱 커졌습니다. 허기봇(HuggieBot)의 주요 창립 멤버인 블락(Block)은 “이 로봇을 개발한 목적은 특히 전염병으로 인해 사회적으로 소외된 사람들을 위로하기 위해 고도로 의인화된 따뜻한 포옹을 보내는 데 사용하는 것”이라고 말했습니다.
로봇을 껴안고 있는 브록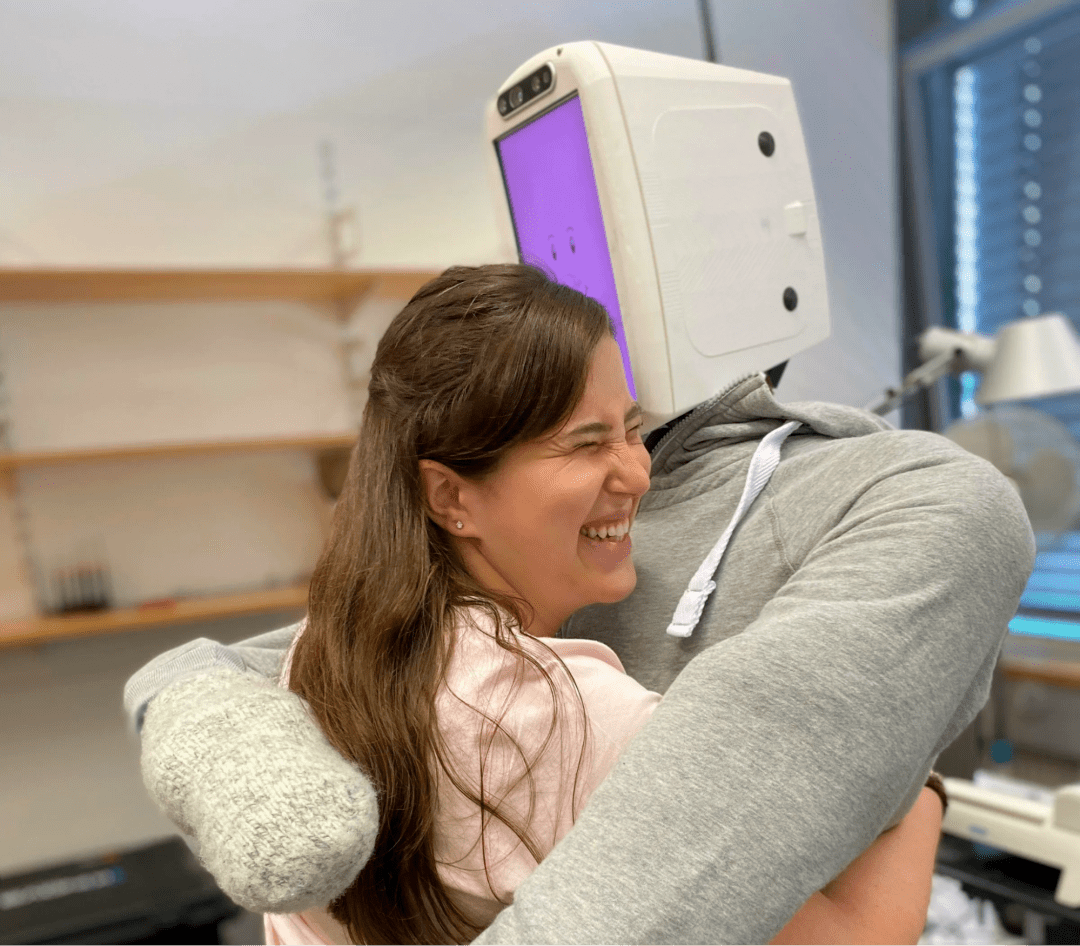
포옹의 편안함을 향상시키는 방법은 무엇입니까? 이런 것을 수용한다는 것은 너무 신비스러운 일이지만, 과학자들은 여전히 이를 정량화하고 싶어합니다.
2017년에 팀은 첫 번째 시도를 시작했습니다. 그들은 매우 조잡해 보이는 로봇을 만들고 총 12가지 유형의 포옹을 디자인했습니다.
프로토타입 로봇의 두 팔과 몸통은 두꺼운 폼과 솜으로 감싸져 있습니다
그런 다음 그들은 30명의 자원봉사자를 찾아 로봇에게 각 사람에게 12번의 포옹을 달라고 요청했습니다. 포옹은 더 길거나 더 짧게 지속되었으며 자세는 달랐습니다.
의외로 이 로봇은 무게가 450파운드에 달하고 키가 사람만큼 크지만, 누구도 이에 눌리지 않았고, 겁이 나서 도망가는 사람도 없었습니다.
오히려 많은 사람들은 "로봇을 포옹하는 것이 정말 즐겁습니다. 경험이 새롭고 놀라운 것이 아니기 때문입니다"라고 말했습니다. 이러한 긍정적인 피드백은 Bullock과 그녀의 팀에게 격려가 되었고, '로봇이 포옹을 할 수 있을까?'에 도전하고 싶어하기도 했습니다. 진짜 사람보다 낫네.”
그래서 그들은 가장 초기(1992년)이자 가장 유명한 Temple Grandin 압출기부터 시작하여 시장에 나와 있는 여러 로봇을 먼저 조사했습니다.
보세요, 이건 로봇도 아니고 그냥 기계일 뿐입니다. 포옹을 시뮬레이션하기 위해 두 개의 폼 패널을 압착하여 압력을 생성하는 이 기계는 자폐증이 있는 어린이를 치료하는 데 널리 사용되었습니다.
나중에 이를 기반으로 동물 시뮬레이션 제품이 파생되었지만 이로 인해 더욱 "사용자 친화적"이 되었습니다.
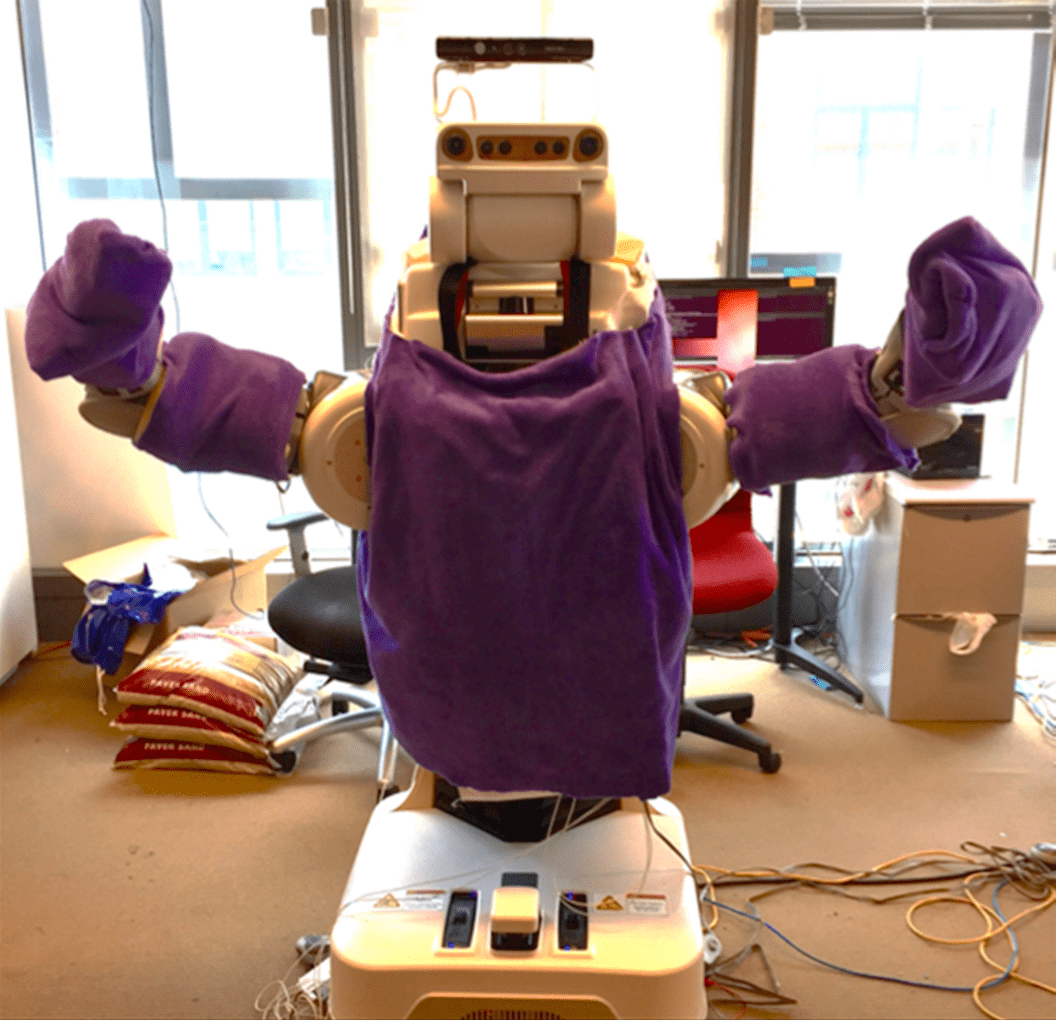
이를 바탕으로 블록과 친구들은 1세대 허기봇을 만들었습니다. 로봇을 두꺼운 보라색 면으로 감싸는 것 외에도 다양한 발열체를 사용해 허기봇을 충분히 부드럽고 따뜻하게 만들었습니다.
그들은 또한 로봇을 더욱 자율적으로 만드는 또 다른 단계를 원합니다.
그래서 그들은 로봇 뒷면에 촉각 센서를 추가했습니다. 이 센서는 늘어날 수 있으며 사용자가 언제 접촉을 시작하고 언제 포옹을 끝내고 싶은지 감지하여 로봇이 "얼마나 오랫동안, 얼마나 꽉 조여야 하는지" 예측할 수 있습니다. 사용자에게 포옹을 해주세요.
곧 Bullock은 그들이 너무 단순하게 생각한다는 것을 발견했습니다.
사람은 포옹의 시작과 끝에 매우 민감합니다. 특히 사용자가 출시 준비가 되었다고 표시하자마자 출시하세요. 너무 이르거나 너무 늦게 출시되면 사용자는 만족하지 못할 것입니다.
즉, 현재 이 촉각 센서로는 충분하지 않습니다. 그래서 그들은 시각과 촉각 인식을 동시에 사용해 포옹을 제공하는 업계 최초의 스마트 기기인 허기봇 2.0(HuggieBot 2.0)을 개발하기 시작했습니다.
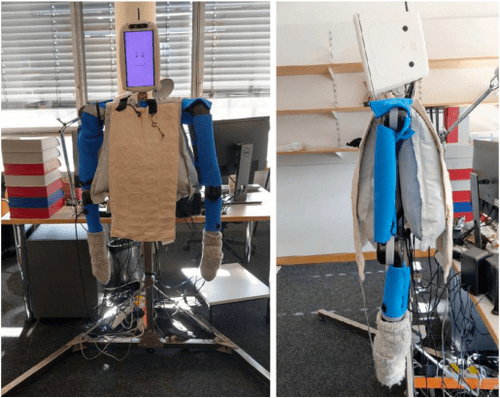
하단부에 V자 형태의 베이스가 있어 사용자가 가까이 다가가서 안아주기에도 편리합니다. 또한 본체에는 기압 센서와 마이크 증폭기가 포함된 HiggieChest라는 맞춤형 감지 시스템이 있습니다.
간단히 말하면,
이를 통해 사용자의 포옹 터치를 로봇 몸 전체에 빠르게 전달할 수 있어 보다 쉽고 빠르게 대화형 응답을 할 수 있습니다.
동시에 로봇이 다양한 인체 유형에 따라 움직임을 조정할 수 있도록 하고 금속 팔이 로봇을 안고 오는 사용자에게 부상을 입히는 것을 방지하기 위해로봇 팔은 매우 민감하고 흥미롭게 설정되었습니다.
포옹 외에도 사람들은 로봇에게 더 많은 것을 기대하기 시작했습니다
블록은 실험을 통해 32명의 사용자로부터 총 512개의 허그 데이터를 수집했고, 흥미로운 현상을 발견했습니다.
데이터 수집의 정확성을 보장하기 위해 연구팀은 피험자들에게 포옹 한 번에 쓰다듬기, 쥐기 등 한 가지 동작만 수행하도록 구체적으로 지시했습니다.
그러나 연구실 영상을 통해 참가자 32명 중 7명이 무의식적으로 다양한 동작을 조합하는 모습을 발견했고, 어떤 사람은 로봇을 꼭 안고 나서 풀어주고, 로봇의 어깨를 가볍게 두드리는 모습도 보였습니다.
사람들은 단순한 포옹에 더해 점차 로봇에 대한 감정적인 기대를 더 많이 투영하고 있는 것 같습니다.
사용자 피드백에서 Block도 다음과 같은 사실에 놀랐습니다. : 프로그래밍된 "완벽한 포옹 각도 및 프로세스"에 비해 사용자는 실제로 로봇이 자신의 움직임에 따라 "즉흥적인" 반응을 하는 것을 선호합니다.
78.13%의 참가자는 이러한 반응을 통해 로봇이 더욱 활기차고 현실감 있게 느껴질 것이며, 상대방이 이해해 준다는 느낌을 받을 것이라고 답했습니다. 현재 모션 피드백은 완벽하지만 너무 기계적이어서 사람들이 로봇과 인간에 대해 동일한 감정적 투자를 느끼게 하지 않습니다.
그래서 최신 버전인 허기봇 3.0에서는 로봇이 '수동적 반응'과 '능동적 반응'을 제공하는 기능을 설정했습니다.
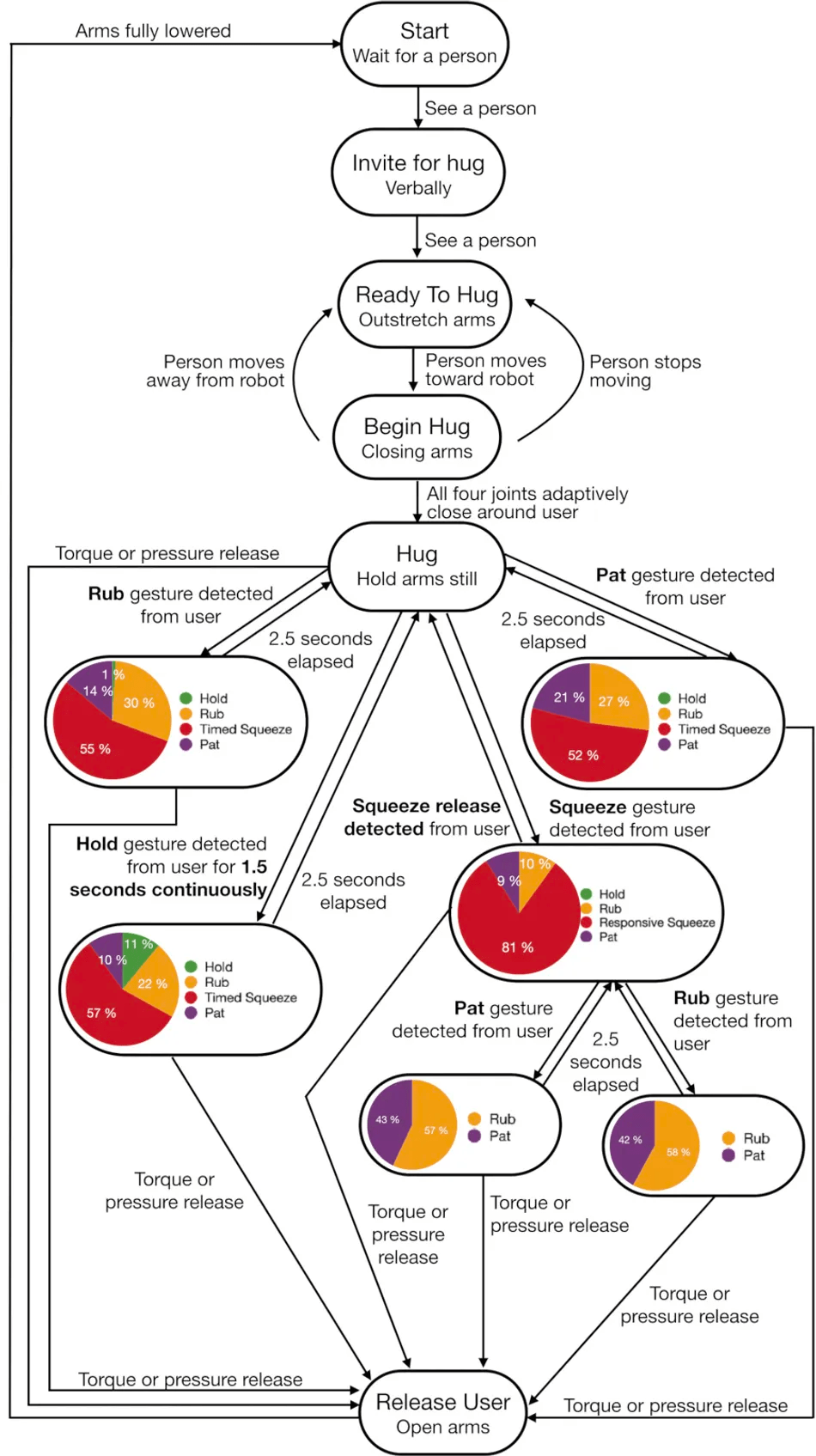
간단히 말하면, 로봇이 사용자가 포옹 자세를 유지하는 것 외에 쓰다듬거나, 쥐거나, 문지르는 것을 감지하면 로봇은 피드백을 줄 확률에 따라 다르게 반응합니다.
로봇은 이러한 동작을 한 번에 또는 여러 번 연속으로 참을성 있게 반복할 수 있습니다. 이것은 많은 실제 사람들보다 훨씬 낫지 않습니까?
하지만 사람들이 다른 행동을 하지 않고 오랫동안 서로 포옹만 한다면 로봇은 '능동 반응'을 일으키며, 그 간격은 약 1.5초입니다.
그래서 포옹은 간단한 것 같지만 놓아주기가 어렵습니다. 상호작용도 잘 제어되어야 합니다.
지금까지 블록팀은 수년에 걸친 정량적 연구를 통해 "황금 표준 수용" 세트를 요약했습니다.
- 소프트
- 온도가 있습니다.
- 몸 크기는 성인과 비슷합니다.
- 다가오는 사람을 민감하게 감지하고 초대해야 하며 포옹 동작이 그 사람과 동기화되어야 합니다. 껴안는 사람이 편안함을 느낄 수 있도록 팔의 위치를 적극적으로 조정하세요.
- 허그 중에 상대방이 어떤 소망을 표현했는지 빠르게 알아보세요. 껴안는 동안 몸짓을 알아보세요.
- 이러한 동작에 신속하게 응답하세요.
- 모든 응답은 약간씩 달라야 합니다.
- 껴안는 과정에서 가끔은 주도적으로 관심을 표현하는 몸짓을 해야 할 때도 있습니다.
- 스스로에게 물어보세요.
- 누군가를 껴안을 때 이런 짓을 해보셨나요?
현재 Bullock 팀은 4세대 포옹 로봇을 집중적으로 개발하고 있습니다. 당장 자신을 치료할 로봇을 구입할 수 없더라도 사용 방법을 먼저 배울 수 있습니다.
이렇게 보면 성실함이 언제나 필수죠. 우리에게 필요한 것은 '완벽한 포옹'이 아니라 '진심한 포옹'입니다.
부활절 달걀 일부 사용자가 너무 관여하고 너무 많은 힘을 사용하는 것을 방지하기 위해 과학자들은 로봇에 새로운 몸통도 제공했습니다.
가장자리를 따라 열 밀봉한 다음 열 밀봉 위에 HH-66 비닐 시멘트를 사용하면 더 강하고 압력에 강합니다.
전에 누가 저를 너무 꽉 잡아서 로봇에서 공기가 새더라구요!
참고자료
[2] 로봇이 잘 안아줄 수 있을까요? https://hackaday.com/2022/01/24/can-robots-give-good-hugs/
[3] HuggieBot 3.0 – 로봇이 과학을 사용해 완벽한 포옹을 제공합니다 https://www.odditycentral.com/technology/huggiebot-3-0-robot-uses-science-to-deliver-the-perfect-hug.html
작성자: Lilyann
편집자: biu
별도의 언급이 없는 한, 사진은 참조 [1]에서 가져온 것이며 그에 첨부된 비디오 스크린샷입니다
필요하신 경우 sns@guokr.com으로 연락주세요
위 내용은 실제 사람이 당신을 진심으로 안아줄 수 없을 때 로봇이 조치를 취할 것입니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7475
7475
 15
1377
52
77
11
49
19
19
31
15
1377
52
77
11
49
19
19
31

 AI는 어떻게 로봇을 보다 자율적이고 적응력 있게 만들 수 있습니까?
Jun 03, 2024 pm 07:18 PM
AI는 어떻게 로봇을 보다 자율적이고 적응력 있게 만들 수 있습니까?
Jun 03, 2024 pm 07:18 PM
산업자동화 기술 분야에서 최근 무시하기 어려운 두 핫스팟이 있는데 바로 인공지능(AI)과 엔비디아다. 원본 콘텐츠의 의미를 바꾸지 말고, 콘텐츠를 미세 조정하고, 콘텐츠를 다시 작성하고, 계속하지 마세요. “그뿐만 아니라 Nvidia가 원래 그래픽 처리 장치(GPU)에만 국한되지 않기 때문에 둘은 밀접하게 관련되어 있습니다. 엔비디아는 최근 GPU를 확장해 디지털 트윈 분야까지 확장하고 있으며, 최근 떠오르는 AI 기술과도 긴밀하게 연결돼 있다”고 말했다. Schneider Electric, Teradyne Robotics, MiR 및 Universal Robots 회사도 포함됩니다. 최근 엔비디아(Nvidia)는
 정규 표현식을 사용하여 PHP 배열에서 중복 값 제거
Apr 26, 2024 pm 04:33 PM
정규 표현식을 사용하여 PHP 배열에서 중복 값 제거
Apr 26, 2024 pm 04:33 PM
정규식을 사용하여 PHP 배열에서 중복 값을 제거하는 방법: 정규식 /(.*)(.+)/i를 사용하여 중복 항목을 일치시키고 바꿉니다. 배열 요소를 반복하고 preg_match를 사용하여 일치하는지 확인합니다. 일치하면 값을 건너뛰고, 그렇지 않으면 중복 값이 없는 새 배열에 추가합니다.
 구름고래 Xiaoyao 001 청소 및 걸레질 로봇에는 '뇌'가 있습니다! 경험 |
Apr 26, 2024 pm 04:22 PM
구름고래 Xiaoyao 001 청소 및 걸레질 로봇에는 '뇌'가 있습니다! 경험 |
Apr 26, 2024 pm 04:22 PM
쓸고 닦는 로봇은 최근 소비자들 사이에서 가장 인기 있는 스마트 가전제품 중 하나입니다. 그것이 가져오는 조작의 편리함, 심지어 조작이 필요하지 않은 것만으로도 게으른 사람들이 손을 자유롭게 할 수 있게 되어 소비자는 일상적인 집안일에서 "해방"되고 위장된 형태로 삶의 질이 향상됩니다. 이러한 열풍에 힘입어 시중에 나와 있는 거의 모든 가전제품 브랜드가 자체적으로 청소, 물걸레 로봇을 제작하고 있어 전체 청소, 물걸레 로봇 시장이 매우 활발해지고 있습니다. 그러나 시장의 급속한 확장은 필연적으로 숨겨진 위험을 가져올 것입니다. 많은 제조업체가 더 많은 시장 점유율을 빠르게 점유하기 위해 바다의 전술을 사용할 것이며 결과적으로 업그레이드 포인트 없이 많은 신제품이 나올 것이라고도 합니다. '마트료시카' 모델이라고 해도 과언이 아닙니다. 그러나 모든 청소 및 걸레질 로봇이 그런 것은 아닙니다.
 중국어 대화를 지원합니다! 새로운 NVIDIA ChatRTX 업데이트됨
Jun 09, 2024 am 11:25 AM
중국어 대화를 지원합니다! 새로운 NVIDIA ChatRTX 업데이트됨
Jun 09, 2024 am 11:25 AM
이미 2월에 NVIDIA는 LLM 기반 챗봇인 ChatwithRTX를 출시했습니다. 5월에는 챗봇이 업데이트되어 새로운 모델과 새로운 기능이 추가되었으며, 패키징 패키지도 35G에서 11G로 축소되었으며, 소프트웨어 이름이 공식적으로 ChatRTX로 변경되었습니다. ChatwithRTX에 대한 이전 기사와 동영상에서 ChatwithRTX에는 자체 중국어 응답이 없다고 언급했습니다. 중국어 답변을 구현하려면 자체 환경, 대규모 언어 모델 등을 설치해야 합니다. 하지만 이 단계는 사용자에게 상대적으로 높은 문턱을 가지고 있으며, 중국어 질문과 답변을 얻기 위해서는 많은 복잡한 단계를 거쳐야 합니다. 소개에 앞서 ChatRTX가 무엇인지 간략하게 알아보겠습니다.
 중국 과학기술대학교 휴머노이드 로봇 연구소가 공개돼 양쯔강 삼각주 휴머노이드 로봇 연합 결성을 발표했다.
Jun 19, 2024 pm 12:59 PM
중국 과학기술대학교 휴머노이드 로봇 연구소가 공개돼 양쯔강 삼각주 휴머노이드 로봇 연합 결성을 발표했다.
Jun 19, 2024 pm 12:59 PM
이 사이트는 오늘 오전 중국 과학기술대학교 인공지능 및 휴머노이드 로봇 프론티어 포럼이 학교 첨단단지에서 열렸다고 18일 보도했다. 중국 과학기술대학교 인공지능 및 데이터 과학부와 휴머노이드 로봇 연구소가 속속 공개됐다. 휴머노이드 로봇 연구소 기술위원회는 장강 삼각주 휴머노이드 로봇 연합의 설립을 발표했습니다. USTC 휴머노이드 로봇 연구소는 USTC의 다학제적 장점을 활용하고 재료 감지, 구조 작동, 모션 제어 및 구체화된 지능 분야에서 기술 혁신을 위해 노력하여 지능형 분야에서 USTC의 발전을 촉진하는 데 전념하고 있습니다. 로봇. 연구소는 기술혁신을 바탕으로 서비스, 의료, 교육 등 분야에서 휴머노이드 로봇의 활용을 적극 추진하고,
 프로그래밍이란 무엇을 위한 것이며 프로그래밍을 배워서 무슨 소용이 있습니까?
Apr 28, 2024 pm 01:34 PM
프로그래밍이란 무엇을 위한 것이며 프로그래밍을 배워서 무슨 소용이 있습니까?
Apr 28, 2024 pm 01:34 PM
1. 프로그래밍은 웹사이트, 모바일 애플리케이션, 게임, 데이터 분석 도구 등 다양한 소프트웨어와 애플리케이션을 개발하는 데 사용될 수 있습니다. 응용 분야는 매우 광범위하여 과학 연구, 의료, 금융, 교육, 엔터테인먼트 등 거의 모든 산업을 포괄합니다. 2. 프로그래밍을 배우면 문제 해결 능력과 논리적 사고 능력을 향상하는 데 도움이 됩니다. 프로그래밍하는 동안 우리는 문제를 분석 및 이해하고, 해결책을 찾고, 이를 코드로 변환해야 합니다. 이러한 사고방식은 우리의 분석적이고 추상적인 능력을 키우고 실제적인 문제를 해결하는 능력을 향상시킬 수 있습니다.
 WALL-E의 실제 버전인 Disney는 경사면/계단과 같은 복잡한 지형을 탐색할 수 있는 새로운 이족 보행 로봇을 시연합니다.
Jul 20, 2024 pm 06:31 PM
WALL-E의 실제 버전인 Disney는 경사면/계단과 같은 복잡한 지형을 탐색할 수 있는 새로운 이족 보행 로봇을 시연합니다.
Jul 20, 2024 pm 06:31 PM
이 웹사이트는 디즈니 연구팀이 테마파크의 경사면, 계단 등 비정형 지형을 횡단할 수 있는 새로운 이족보행 로봇을 설계하고 제작했다고 20일 보도했다. 이 사이트에 대한 참고 사항: 비디오 소스는 Disney이며 Turkey Brothers가 스테이션 B에 업로드했습니다. Disney는 이 이족 보행 로봇 프로젝트를 통해 절차적 애니메이션, 모듈식 하드웨어 및 강화 학습을 결합하여 이러한 독특한 보행을 할 수 있는 로봇을 설계하고 프로그래밍하기를 희망합니다. 그리고 움직임이 특징적입니다. 이 직족 로봇은 2008년 영화 '월-E'의 주인공인 월-E와 다소 비슷하지만, 납작한 머리와 박스형 몸체를 갖고 있다. 이미지 출처: WikiMedia Disney는 프로젝트의 설계 초점이 캐릭터 중심의 기계적 특성에 있다고 밝혔으며, 강력하게 수행하기 위한 강화 학습 기반 제어 아키텍처를 제안했습니다.
 LeCun의 신작: 계층화된 세계 모델, 데이터 기반 휴머노이드 로봇 제어
Jun 13, 2024 am 11:37 AM
LeCun의 신작: 계층화된 세계 모델, 데이터 기반 휴머노이드 로봇 제어
Jun 13, 2024 am 11:37 AM
대형 모델을 지능의 축복으로 삼아 휴머노이드 로봇이 새로운 트렌드로 자리 잡았습니다. SF영화 속 '내가 인간이 아닌 걸 알 수 있는' 로봇이 점점 가까워지는 것 같다. 그러나 인간처럼 생각하고 행동하는 것은 로봇, 특히 휴머노이드 로봇에게는 여전히 어려운 공학적 문제입니다. 간단한 걷기 학습을 예로 들자면, 강화학습을 활용하여 훈련하는 것은 다음과 같이 진화할 수 있습니다. 원칙적으로 (보상 메커니즘을 따르면서) 문제가 없으며, 계단 오르기 목표가 달성되었다는 점만 빼면요. 상대적으로 추상적이며 대부분의 인간과 행동 패턴이 다를 수 있습니다. 로봇이 인간처럼 '자연스럽게' 행동하기 어려운 이유는 관찰과 행동 공간의 고차원적 특성과 이족보행 형태의 본질적인 불안정성 때문입니다. 이에 르쿤이 참여했다.
