

하얼빈공업대학의 바퀴 달린 로봇이 버전 3.0을 출시했습니다! 설계, 제어 및 성능 테스트 이해하기

DARPA(미국 국방고등연구계획국) 로봇 챌린지(DRC)는 2년마다 개최되며 미국 국방부의 후원을 받아 후쿠시마 원전과 같은 위험을 책임질 수 있는 로봇을 선발하고자 합니다. 인간이 접근할 수 없는 현장 응급처치 임무를 위한 로봇.
2015 DRC DARPA 로봇 챌린지에서 한국의 로봇 DRC-HUBO는 자신의 "독특한 기술"을 활용하여 5개국의 다른 상위 로봇 22개를 물리치고 우승을 차지했으며, 당시 Boston Dynamics에서 개발한 많은 로봇도 포함됩니다. 아틀라스, 일본 HRP 등 스타 로봇.
DRC-HUBO는 서기도 하고 무릎을 꿇기도 하는 로봇입니다
로봇 분야에서 걷는 균형은 늘 극복할 수 없는 격차였습니다. 이것이 HUBO의 최종 승리의 열쇠이기도 합니다. 무릎과 발목에 바퀴를 장착해 로봇이 보행 모드에서 바퀴 운동으로 전환할 수 있습니다. 이를 개발한 'KAIST' 팀도 당시 대상 200만 달러를 수상했습니다.
위험한 환경에서의 탐색 및 구조는 로봇 다리 동작의 중요한 응용 분야입니다. 재난 구조나 현장 탐색에 사용되는 로봇은 평탄한 도로에서 빠르게 이동하고 복잡한 지형에 적응하는 능력이 요구되는 경우가 많습니다. 이 문제를 기반으로 하얼빈 공과대학교 기계 전기 공학부 로봇 시스템 국가 핵심 연구소 팀은 기동성이 뛰어나고 적응력이 뛰어난 유압 구동식 자율 바퀴 달린 로봇 시스템인 WLR-3P 로봇을 개발했습니다. 로봇은 평탄한 도로에서도 빠르고 효율적으로 이동할 수 있으며, 험난한 지형 환경에서도 적응성이 뛰어납니다.
본 연구는 중국 과학 기술 저널 Excellence Action Plan High Starting Point 최신호인 Cyborg and Bionic Systems에 논문(WLR-3P에 대한 설계 및 제어: 유압식 바퀴 다리 로봇)이라는 제목으로 게재되었습니다.
▍WLR-3P 로봇의 비밀을 밝히다
먼저 WLR-3P의 모습을 살펴보겠습니다.

호스리스 유압 바퀴다리형 로봇인 WLR-3P는 자율적인 힘으로 빠르게 점프하고 이동할 수 있습니다.
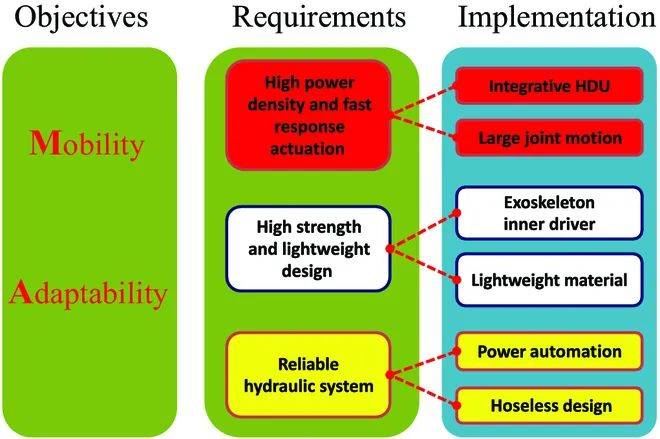
그렇다면 연구자들은 로봇의이동성과 환경 적응성을 어떻게 향상시킬 수 있을까요? 주로 다음 세 가지 사항에 의존합니다. (a) 높은 출력 밀도 및 빠른 응답 구동, (b) 가벼운 무게, 큰 관성 및 높은 강도, (c) 안정적인 유압 시스템.
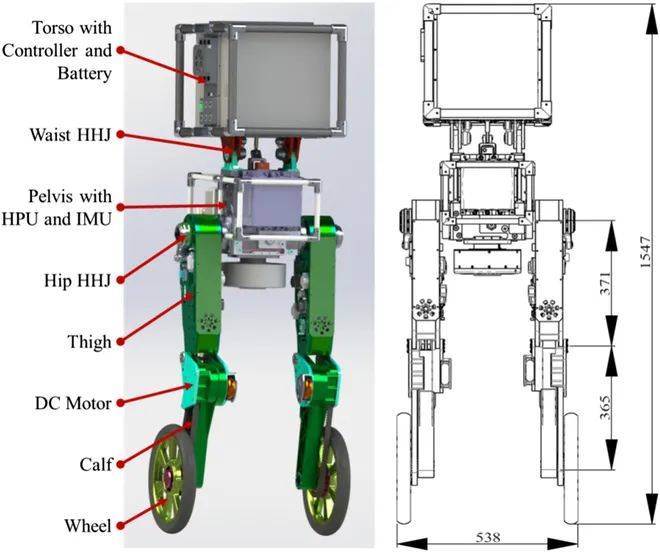
위 그림과 같이 WLR-3P는 7개의 자유도(DOF)를 갖고 있습니다. 즉, 각 다리에 3자유도, 허리 부분에 1자유도가 있습니다. 다리의 3자유도는 각각 고관절, 무릎관절, 구동바퀴에 있으며, 고관절과 무릎관절은 HDU로 구동되고, 구동바퀴는 DC모터로 구동된다.
HDU에는 맞춤형 고주파 응답(20Hz) 서보 실린더, 고성능 서보 밸브, 변위 센서 및 힘 센서가 포함되어 있습니다. WLR-3P의 무게는 80kg이며 온보드 HPU와 배터리가 함께 제공됩니다. 최대 높이는 1.55m, 두 바퀴 사이의 거리는 약 0.54m이다. 또한, 안전상의 이유로 로봇은 1.8kg의 탄소섬유 하이브리드 알루미늄 합금 프레임도 "운반"합니다
유압을 선택하는 이유는 무엇인가요? 간단하게 말하면
통합 유압 구동 장치를 사용하는 로봇은 높은 출력 밀도와 빠른 구동 응답성을 갖습니다.
▍WLR-3P의 앞선 설계와 제어 전략
연구원들은 다음 요소를 고려했습니다: (a) 높은 중량 대비 출력 비율, (b) 뛰어난 충격 저항성, (c) 힘/위치 제어를 위한 고주파 반응, (d) 인간과 유사한 생물학적 특성.
WLR-3P의 무릎 관절 유압 구동 장치(HDU)의 최대 출력 밀도는 약 7kW/kg에 달할 수 있으며 이는 기존 모터보다 훨씬 높습니다. 재작성된 내용: WLR-3P에 있는 무릎 유압 구동 장치(HDU)의 최대 출력 밀도는 약 7kW/kg으로 기존 모터의 출력 밀도를 훨씬 초과합니다
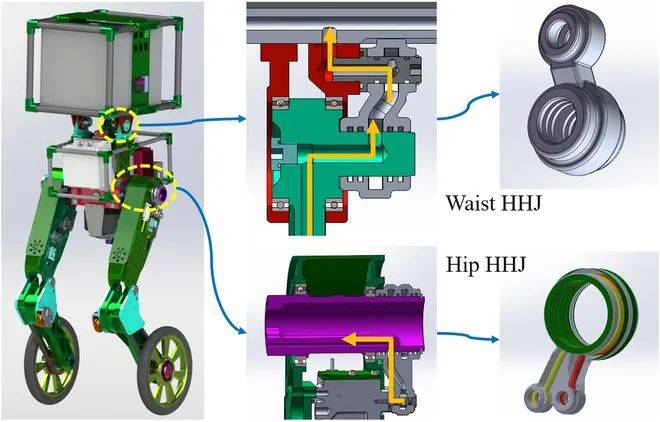
WLR-3P 힙과 허리 HHJ
유압 동력 장치(HPU)의 소형화 및 통합은 주로 펌프 및 엔진의 소형화와 시스템 가열로 인해 유압 로봇 연구 분야의 주요 어려움입니다. WLR-3P는 HPU 설치 공간이 넓지 않기 때문입니다. R&D 인력은 HPU의 소형화 및 통합을 달성하기 위한 혁신적인 설계 아이디어를 제안했습니다.
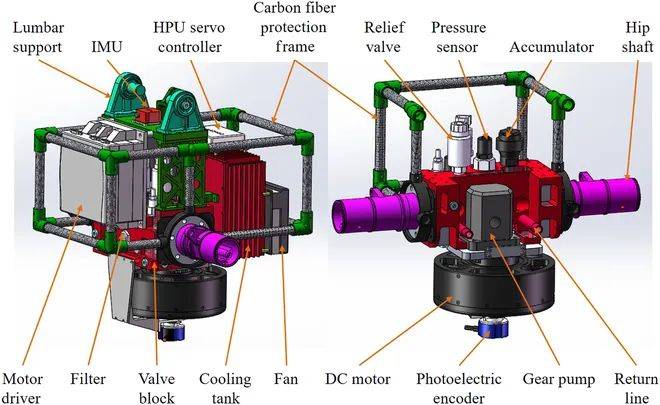
먼저 기어 펌프는 마이크로 커플링을 통해 맞춤형 외부 로터 모터로 구동됩니다. 펌프의 고압 오일은 마이크로 어큐뮬레이터와 필터를 통과하여 시스템에 필요한 유압 동력을 제공합니다. 둘째, 시스템의 발열 문제를 해결하기 위해 방열, 여과 및 전압 안정화를 통합한 다기능 연료 탱크를 설계했습니다. 마지막으로 HPU는 최대 압력 21 MPa, 유속 20 l/min으로 유압 출력을 출력할 수 있습니다.
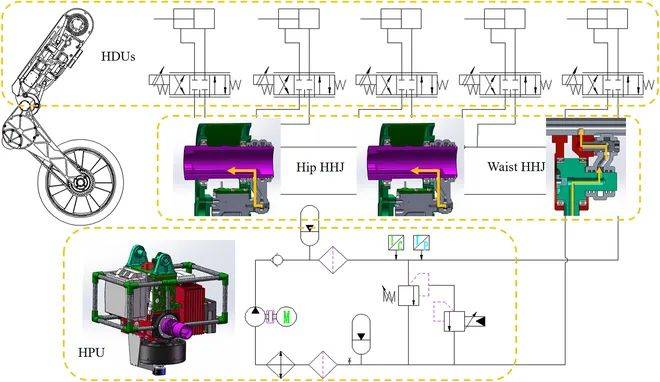
아래 그림은 HPU의 구조와 구성을 보여줍니다.
HPU의 소형화 및 통합으로 로봇이 고무 호스의 한계에서 벗어나 로봇의 움직임이 더욱 "부드러워"집니다.
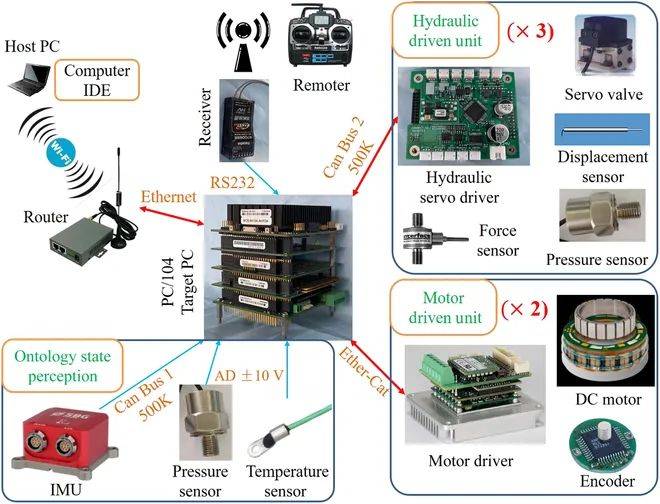
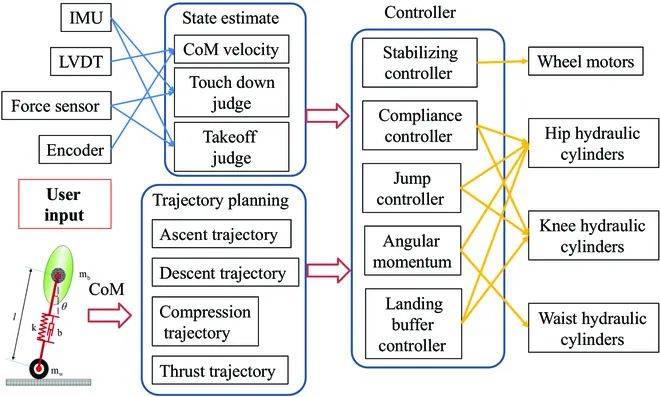
또한 R&D 팀은
계층적 분산 전기 시스템과 제어 전략을 포함한 제어 시스템도 제안했습니다.
다시 작성해야 하는 내용은 다음과 같습니다. ▍WLR-3P의 균형 및 폭발력 테스트
연구원들은균형 잡힌 성능과 폭발력을 중심으로 테스트를 진행했습니다. 빠른 움직임과 쪼그려 앉기는 바퀴 달린 로봇의 균형 성능을 검증하는 가장 기본적인 동작입니다. 빠르게 움직일 때는 로봇의 질량 중심(COM)이 수평 방향으로 빠르게 변하고, 쪼그리고 앉을 때는 COM이 수직 방향으로 빠르게 변합니다.
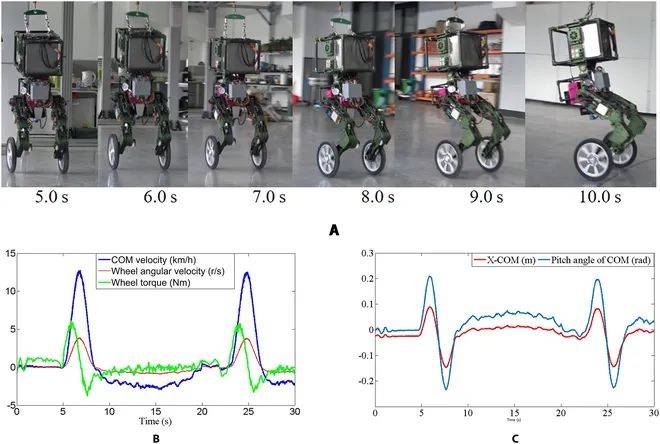
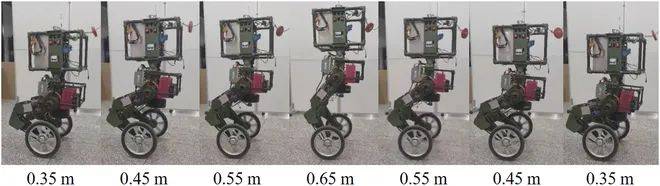
테스트 결과 WLR-3P의 수평 및 수직 균형 성능이 양호하며 로봇 하드웨어 시스템의 신뢰성도 검증되었습니다.
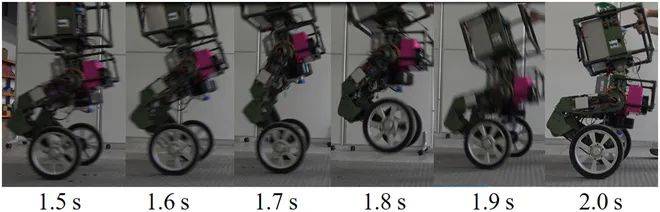
실험 결과에 따르면 로봇 WLR-3P는 13.6km/h의 속도와 0.2m의 점프 높이에 도달할 수 있는 것으로 나타났습니다. 유압 드라이브와 로봇의 구조 설정이 완벽하게 인증되었습니다.

로봇 무게가 가벼울수록, 구동 시스템의 폭발력이 강할수록 로봇이 더 높이 점프할 수 있다는 사실을 발견했습니다. 특히 체중 대비 다리 무게의 비율이 작을수록 무릎 관절의 순간 출력 힘과 속도가 높아져 로봇의 점프 성능에 더 큰 영향을 미치게 된다.
다시 작성해야 하는 내용은 다음과 같습니다. ▍WLR-3P의 두 "형제"
실제 성능과 이론적 설계 성능 사이에는 여전히 어느 정도 격차가 있지만 이는 향후 작업의 방향을 제시한다고 팀에서는 밝혔습니다2017년에는 최초의 유압식 바퀴다리 로봇 WLR-I를 개발하고 통합 설계 및 복합 운동 능력을 성공적으로 검증했습니다. 그러다가 2018년에는 2세대 바퀴 달린 로봇 WLR-II가 최초로 출시되어 호스 없는 디자인을 구현하고 예상치 못한 지형 적응성을 보여주었습니다
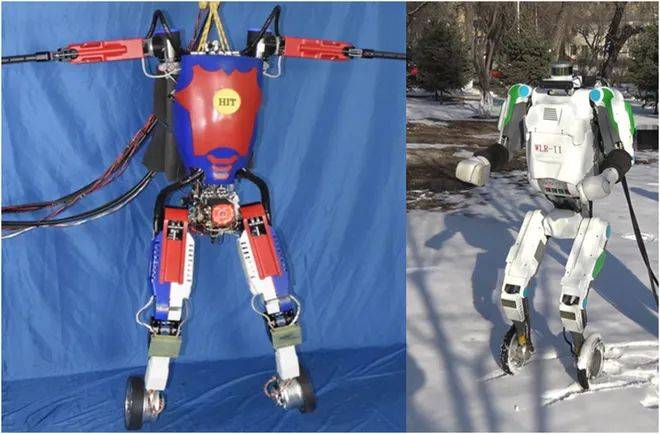
두 형제가 합동운동과 눈 움직임 테스트를 진행하고 있습니다
위 그림에서 볼 수 있듯이 처음 2세대 로봇은 복잡한 지형에 대한 적응성과 평지에서의 기동성이 실제로 입증되었지만 둘 다 외부 펌핑 스테이션을 통해 구동됩니다. 이번에 WLR-3P는 처음 2세대 바퀴 달린 로봇의 설계를 기반으로 상당한 개선을 이루었습니다. 운동 능력을 향상시킬 뿐만 아니라, 파워 자율성을 달성합니다.
다음으로 팀은 HPU의 출력 전력과 HDU에 필요한 전력을 일치시키는 방법도 고려해야 합니다. 구동력 및 로봇 동작에 대한 요구 사항에 대해서는 열 방출 및 소음과 같은 엔지니어링 문제를 고려해야 합니다. 더 중요한 것은 유압 부품의 소형화 및 맞춤화도 미래 연구 방향 중 하나입니다.효율이 너무 높다고 해야 할까요. 그럼 말도 안되는 소리는 그만하고 넷째 형제인 WLR을 기다리세요.
위 내용은 하얼빈공업대학의 바퀴 달린 로봇이 버전 3.0을 출시했습니다! 설계, 제어 및 성능 테스트 이해하기의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7510
7510
 15
1378
52
78
11
53
19
19
64
15
1378
52
78
11
53
19
19
64

 샤오홍슈, 인공지능 챗봇 '다빈치' 테스트 시작
Jan 15, 2024 pm 12:42 PM
샤오홍슈, 인공지능 챗봇 '다빈치' 테스트 시작
Jan 15, 2024 pm 12:42 PM
국내 언론 보도에 따르면 샤오홍슈는 자사 메인 앱에서 '다빈치'라는 AI 애플리케이션을 내부적으로 테스트하고 있다. 이 애플리케이션은 여행 가이드, 음식 가이드, 지리 및 문화 지식, 생활 기술, 개인적 성장 및 심리적 구성 등을 포함한 지능적인 질문과 답변 등 AI 채팅 서비스를 사용자에게 제공할 수 있는 것으로 알려졌다. 보도에 따르면 '다빈치' 학습을 위해 Meta A 제품의 LLAMA 모델을 사용하며, 제품은 올해 9월부터 테스트되었습니다. 샤오홍슈도 그룹 AI 대화 기능에 대한 내부 테스트를 진행했다는 소문이 돌고 있다. 이 기능을 통해 사용자는 그룹 채팅에서 AI 캐릭터를 생성하거나 소개하고 대화 및 상호 작용을 할 수 있습니다. 이미지 출처 : T
 C++ 코드에서 '오류: ')' 토큰 앞에 기본 표현식이 필요함' 문제 해결
Aug 27, 2023 pm 12:28 PM
C++ 코드에서 '오류: ')' 토큰 앞에 기본 표현식이 필요함' 문제 해결
Aug 27, 2023 pm 12:28 PM
C++ 코드에서 "error:expectedprimary-expressionbefore')'token" 문제를 해결하십시오. C++ 프로그래밍에서는 때때로 "expectedprimary-expressionbefore')'token"과 같은 오류 메시지가 표시됩니다. 이 오류는 일반적으로 코드에 사용된 잘못된 구문이나 표현식으로 인해 발생하며, 이로 인해 컴파일러는 코드의 의미를 이해하지 못합니다. 이 기사는
 win11의 네트워크 연결이 비어 있는 이유는 무엇입니까?
Jan 11, 2024 pm 06:21 PM
win11의 네트워크 연결이 비어 있는 이유는 무엇입니까?
Jan 11, 2024 pm 06:21 PM
네트워크 연결 방법을 수정하려고 시도하는 동안 일부 사용자는 전환 프로세스 중에 열린 네트워크 어댑터가 비어 있음을 실수로 발견하여 전환 작업을 성공적으로 완료할 수 없게 되었습니다. 이러한 딜레마에 직면했을 때, 이 문제를 어떻게 해결해야 합니까? win11에서 빈 네트워크 연결은 어떻게 됩니까? 1. 드라이버 문제 컴퓨터에 장착된 네트워크 어댑터 드라이버가 현재 환경이나 버전과 호환되지 않는 것 같습니다. 해결 방법: 해당 네트워크 어댑터 드라이버를 업그레이드하거나 다시 설치하십시오. 2. 하드웨어 문제: 네트워크 어댑터 하드웨어에 물리적 손상이 있거나 심지어 완전한 오류가 발생했습니다. 해결 방법: 원래 네트워크 어댑터 하드웨어를 교체하십시오. 3. 시스템 설정 문제. 컴퓨터의 Win11 시스템 설정 오류에 대한 해결 방법:
 Lenovo Win10 Firewall을 끄는 방법 Lenovo Win10 Firewall을 끄는 방법을 소개합니다.
Jul 13, 2023 pm 01:33 PM
Lenovo Win10 Firewall을 끄는 방법 Lenovo Win10 Firewall을 끄는 방법을 소개합니다.
Jul 13, 2023 pm 01:33 PM
Lenovo Win10 방화벽을 끄는 방법은 무엇입니까? 방화벽은 사용자에게 더 좋고 안전한 컴퓨터 네트워크 경험을 제공할 수 있습니다. 최근 일부 사용자가 Lenovo Win10 컴퓨터에서 방화벽을 끄는 방법을 문의했습니다. 실제로 방법은 매우 간단합니다. Lenovo Win10 방화벽을 끄는 방법 소개 1. 설정을 클릭하고 "제어판"을 입력한 후 "제어판"을 엽니다. 2. "Windows 방화벽"을 찾으세요. 3. "Windows Defender 방화벽 켜기 또는 끄기"를 클릭하세요. 4. 닫기를 선택하고 확인합니다.
 임베디드 시스템 개발에서의 C++ 멀티 태스킹 및 스케줄링 기능 구현 기술
Aug 27, 2023 pm 03:42 PM
임베디드 시스템 개발에서의 C++ 멀티 태스킹 및 스케줄링 기능 구현 기술
Aug 27, 2023 pm 03:42 PM
임베디드 시스템 개발의 C++ 멀티 태스킹 및 스케줄링 기능 구현 기술 임베디드 시스템은 다른 장치에 임베디드되어 특정 기능으로 사용되는 컴퓨터 시스템을 말합니다. 이러한 시스템은 일반적으로 여러 작업을 동시에 처리하고 유연한 작업 예약을 수행해야 합니다. 임베디드 시스템 개발에서 C++는 멀티태스킹 및 스케줄링 요구 사항을 충족하는 많은 강력한 기능을 제공하는 널리 사용되는 프로그래밍 언어입니다. 이 기사에서는 임베디드 시스템에서 멀티태스킹 및 스케줄링을 구현하는 C++의 몇 가지 기술을 소개하고 코드 예제를 통해 이를 설명합니다.
 컴퓨터 C 드라이브가 꽉 찼을 때 win7 시스템을 정리하는 방법
Jul 09, 2023 pm 04:05 PM
컴퓨터 C 드라이브가 꽉 찼을 때 win7 시스템을 정리하는 방법
Jul 09, 2023 pm 04:05 PM
일정 기간 동안 win7 시스템을 실행한 후 C 드라이브 공간이 점점 작아지는 것을 발견했습니다. C 드라이브 공간의 크기는 시스템 속도와 관련이 있습니다. win7 시스템의 C 드라이브가 갑자기 가득 차는 상황이 발생하면 일부 사용자는 어떻게 해야 합니까? win7 컴퓨터에서 C 드라이브를 청소하는 방법을 가르쳐 드리겠습니다. 1. C 드라이브 - 속성을 마우스 오른쪽 버튼으로 클릭하면 다음 화면이 표시되며 디스크 정리를 클릭합니다. 2. 다음과 같은 화면이 나타나면 모두 확인 후 확인을 클릭하여 직접 청소해 주세요. 3. 컴퓨터 - 속성 - 시스템 보호를 마우스 오른쪽 버튼으로 클릭하고 구성을 클릭한 다음 삭제를 선택합니다. 4. 탭을 고급으로 전환하고 설정을 클릭합니다. 5. 가상 메모리를 설정하고 변경을 클릭하세요. 6. 모든 드라이브에 대한 페이징 파일 크기 자동 관리를 선택 취소한 다음 C 드라이브를 선택하고 페이징 파일 없음을 선택한 후 가상 메모리 설정을 다음으로 설정합니다.
 Windows 7 제어판을 여는 위치 Windows 7 제어판의 시작 부분에 대한 자세한 소개
Jul 09, 2023 pm 12:45 PM
Windows 7 제어판을 여는 위치 Windows 7 제어판의 시작 부분에 대한 자세한 소개
Jul 09, 2023 pm 12:45 PM
많은 사용자는 Windows 7 제어판을 여는 방법을 모릅니다. 실제로 Windows 7 컴퓨터의 제어판을 여는 방법은 매우 간단합니다. 먼저 마우스 오른쪽 버튼을 클릭하여 컴퓨터 속성 페이지를 엽니다. 페이지에서 제어판을 보고 클릭하여 열 수 있습니다. Windows 7 제어판을 열고 컴퓨터 작동을 더욱 편안하고 편리하게 만들 수 있는 일련의 설정을 지정할 수 있습니다. Windows 7 제어판 열기에 대한 자세한 소개 1. 컴퓨터 바탕 화면 아이콘을 마우스 오른쪽 버튼으로 클릭합니다. 2. [속성]을 클릭합니다. 3. 컴퓨터 속성이 속한 디렉토리에서 [제어판]을 클릭합니다. 4. 제어판 설정 페이지를 열 수 있습니다.
 JavaScript 함수 템플릿 엔진: HTML을 동적으로 생성하기 위한 강력한 도구
Nov 18, 2023 pm 12:41 PM
JavaScript 함수 템플릿 엔진: HTML을 동적으로 생성하기 위한 강력한 도구
Nov 18, 2023 pm 12:41 PM
JavaScript 함수 템플릿 엔진: HTML을 동적으로 생성하기 위한 강력한 도구입니다. 예를 들어, 사용자가 입력한 정보를 기반으로 검색 결과를 표시하고, HTML에서 들어오는 데이터를 기반으로 페이지를 동적으로 렌더링하는 등 HTML을 동적으로 생성하는 것이 일반적인 요구 사항입니다. 배경 등 전통적인 프런트 엔드 개발에서는 일반적으로 문자열 연결을 사용하여 동적 HTML 코드를 생성합니다. 그러나 이 방법에는 가독성이 좋지 않고 오류가 발생하기 쉽고 유지 관리가 어려운 등 많은 제한 사항이 있습니다. JavaScript 함수 템플릿 엔진은 매우 훌륭할 수 있습니다.
