

오르고, 점프하고, 좁은 틈을 건너는 오픈소스 강화학습 전략으로 로봇견 파쿠르 가능

파쿠르는 익스트림 스포츠로, 복잡한 환경에서 다양한 장애물을 빠르게 극복해야 하는 로봇, 특히 네발 달린 로봇견에게는 큰 도전입니다. 일부 연구에서는 참조 동물 데이터나 복잡한 보상을 사용하려고 시도했지만 이러한 접근 방식은 다양하지만 맹목적이거나 비전 기반이지만 장면별 파쿠르 기술을 생성합니다. 그러나 자율 파쿠르를 위해서는 로봇이 다양한 시나리오를 인식하고 신속하게 대응하기 위해 비전 기반의 다양한 일반 기술을 학습해야 합니다.
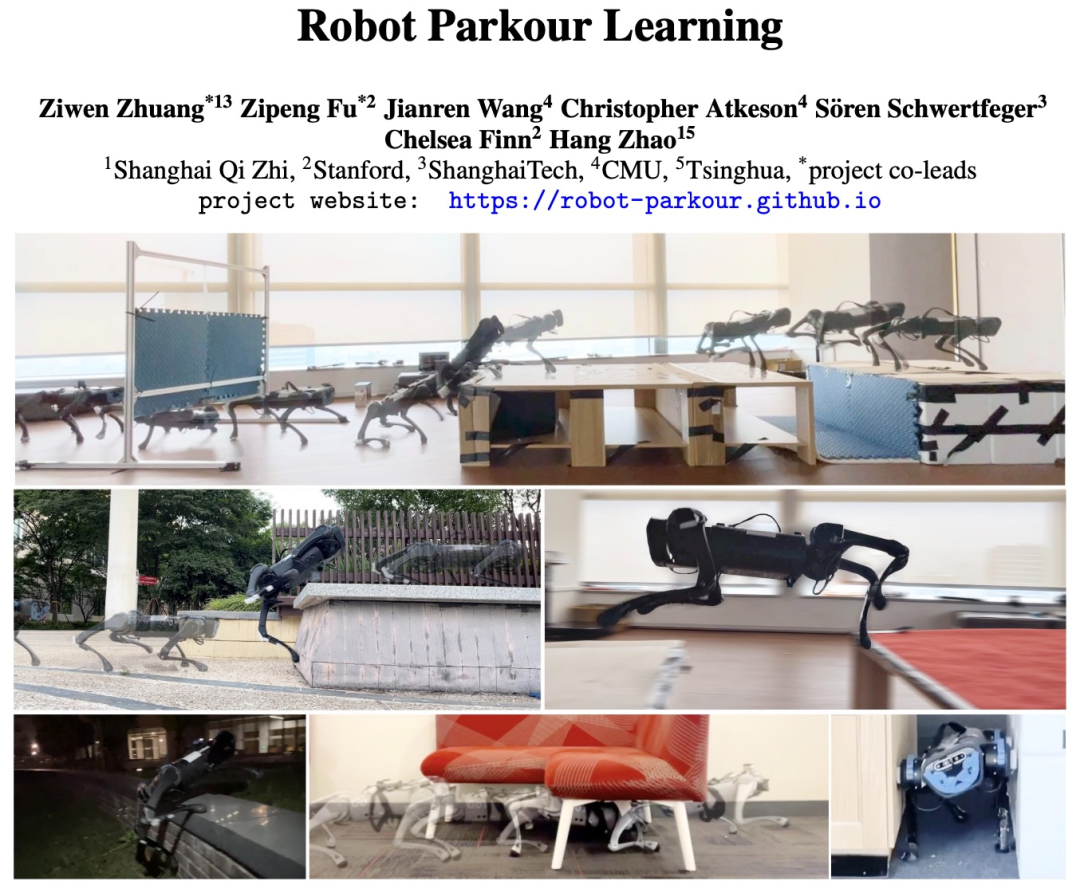
최근에는 로봇 개 파쿠르 영상이 입소문을 탔습니다. 영상 속 로봇 개는 다양한 상황에서 다양한 장애물을 빠르게 극복했습니다. 예를 들어 철판 아래 틈새를 통과하고 나무 상자 위로 올라간 다음 다른 나무 상자로 점프하는 일련의 움직임이 매끄럽고 매끄럽습니다.


이 일련의 움직임은 보여줍니다. 로봇개는 땅에 달라붙기, 기어오르기, 점프하기의 세 가지 기본 기술을 익혔습니다.

 로봇 개가 실패하면 장애물을 극복하고 몇 번 더 시도해야 합니다.
로봇 개가 실패하면 장애물을 극복하고 몇 번 더 시도해야 합니다.
이 콘텐츠는 중국어로 다시 작성되었습니다. 이 로봇 개는 저가형 로봇을 위해 개발된 '파쿠르' 기술 학습 프레임워크를 기반으로 합니다. 이 프레임워크는 Shanghai Qizhi Research Institute, Stanford University, ShanghaiTech University, CMU 및 Tsinghua University의 연구원들이 공동으로 제안했으며 해당 연구 논문은 CoRL 2023(Oral)에 선정되었습니다. 이 연구 프로젝트는 오픈 소스입니다
논문 주소: https://arxiv.org/abs/2309.05665

방법 소개
이 연구에서는 참조 모션 데이터 없이 간단한 보상을 사용하여 여러 파쿠르 기술을 학습할 수 있는 엔드투엔드 비전 기반 파쿠르 전략을 학습하기 위한 새로운 오픈 소스 시스템을 소개합니다.
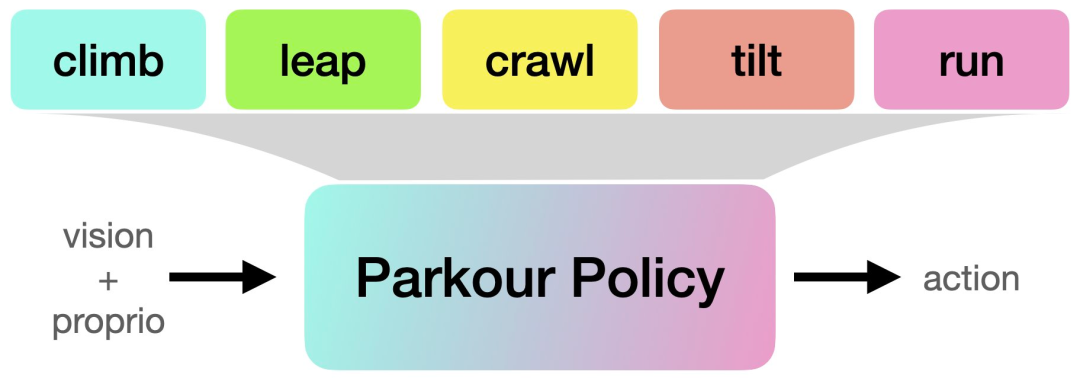
구체적으로, 본 연구에서는 로봇이 높은 장애물 오르기, 큰 틈 뛰어넘기, 낮은 장애물 아래로 기어가기, 작은 틈 통과하기, 달리기 등의 기술을 학습하고, 이러한 기술을 파쿠르로 번역할 수 있도록 고안된 강화학습 방법을 제안합니다. 하나의 비전에 기초한 전략. 동시에 이러한 기술은 자기중심적 깊이 카메라를 사용하여 4족 로봇으로 이전됩니다.
본 연구에서 제안한 파쿠르 전략을 저가형 로봇에 성공적으로 배포하려면 온보드 컴퓨팅(Nvidia Jetson), 공중 깊이 카메라(Intel)를 사용하기만 하면 됩니다. Realsense) 및 온보드 전원 공급 장치, 모션 캡처, LiDAR, 다중 깊이 카메라 및 많은 계산이 필요 없음
파쿠르 전략을 훈련하기 위해 연구는 다음 세 단계를 수행했습니다. 작업:
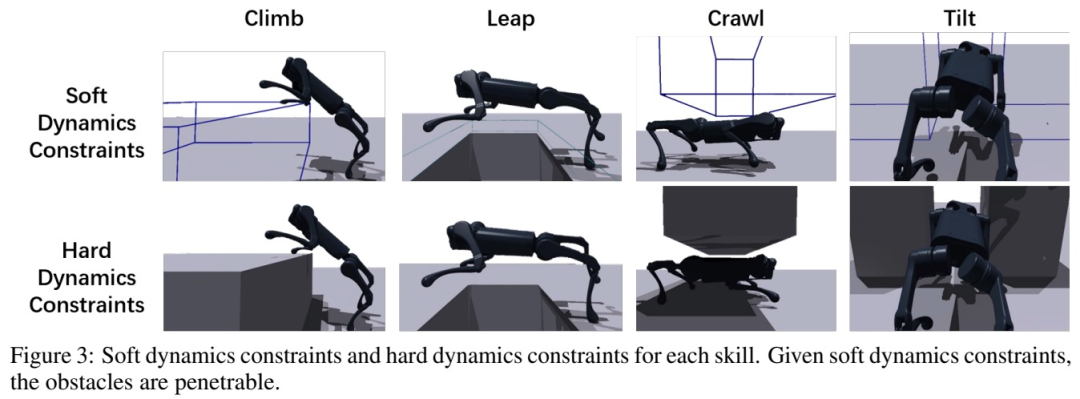
The 첫 번째 단계: 연성 동적 제약 조건을 사용한 강화 학습 사전 훈련. 이 연구에서는 자동 코스를 사용하여 로봇이 장애물을 건너는 방법을 학습하고 로봇이 장애물을 극복하는 방법을 점차적으로 학습하도록 장려합니다
두 번째 단계: 엄격한 동적 제약 조건을 사용하여 미세 조정하는 강화 학습. 연구에서는 이 단계에서 모든 동적 제약을 적용하고 현실적인 역학을 사용하여 사전 훈련 단계에서 학습된 로봇의 행동을 미세 조정합니다.
세 번째 단계: 증류. 각 개별 파쿠르 기술을 학습한 후 연구에서는 Dagger를 사용하여 온보드 인식 및 계산만 사용하여 다리가 있는 로봇에 배포할 수 있는 비전 기반 파쿠르 정책(RNN으로 매개변수화)으로 추출합니다.
실험 및 결과
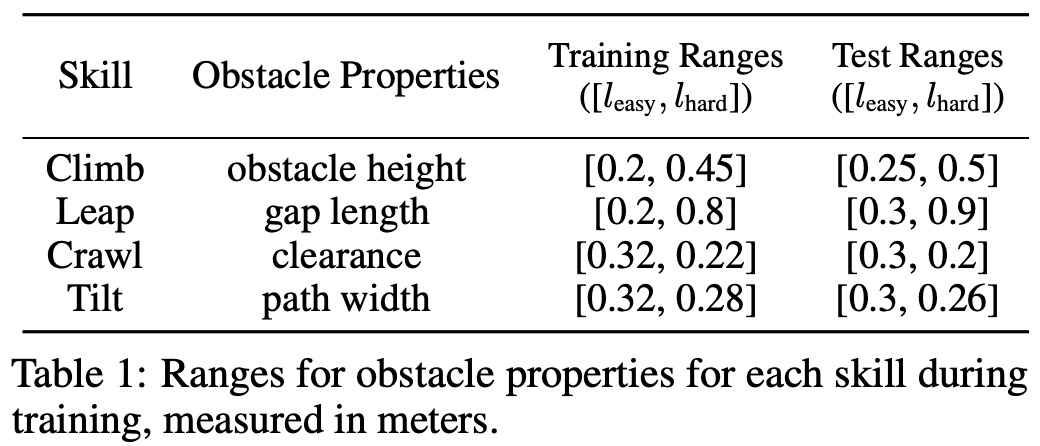
훈련에서 연구는 아래 표 1과 같이 각 기술에 해당하는 장애물 크기를 설정했습니다.
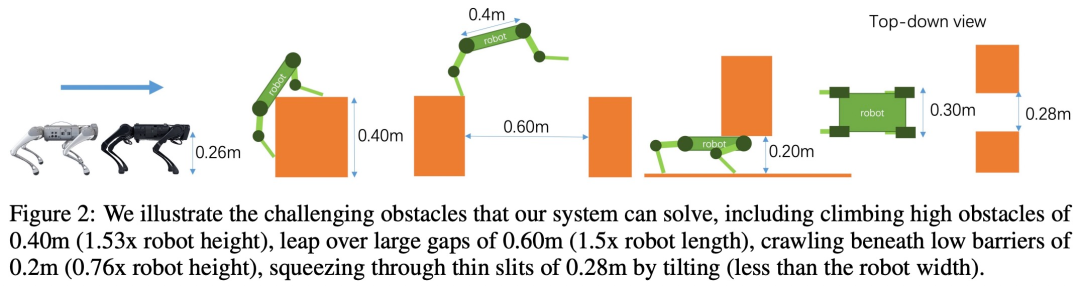
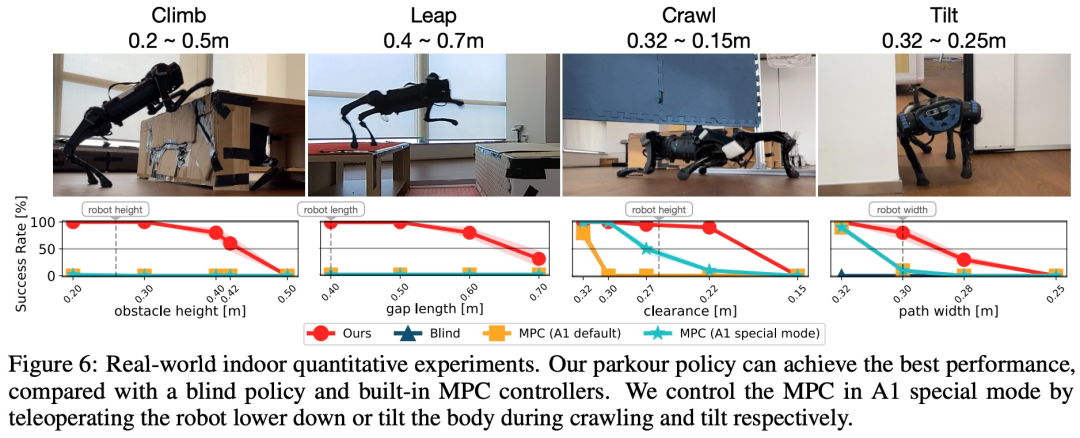
연구 광범위한 시뮬레이션과 실제 -생명 실험이 수행되었으며, 결과는 파쿠르 전략을 통해 저비용의 4족 보행 로봇이 온보드 컴퓨팅, 온보드 시각적 감지 및 온보드 전력을 포함하여 도전적인 환경을 사용하여 횡단할 수 있는 적절한 파쿠르 기술을 자율적으로 선택하고 수행할 수 있음을 보여줍니다. 최대 0.40m(로봇 높이의 1.53배)까지 장애물을 오르고, 최대 0.60m(로봇 길이의 1.5배) 큰 틈을 뛰어넘고, 0.2m(로봇 높이의 0.76배)만큼 낮은 장애물도 뛰어넘을 수 있다. 0.28m의 좁은 틈(로봇 폭보다 작은)을 기울여서 계속해서 앞으로 달릴 수 있습니다.
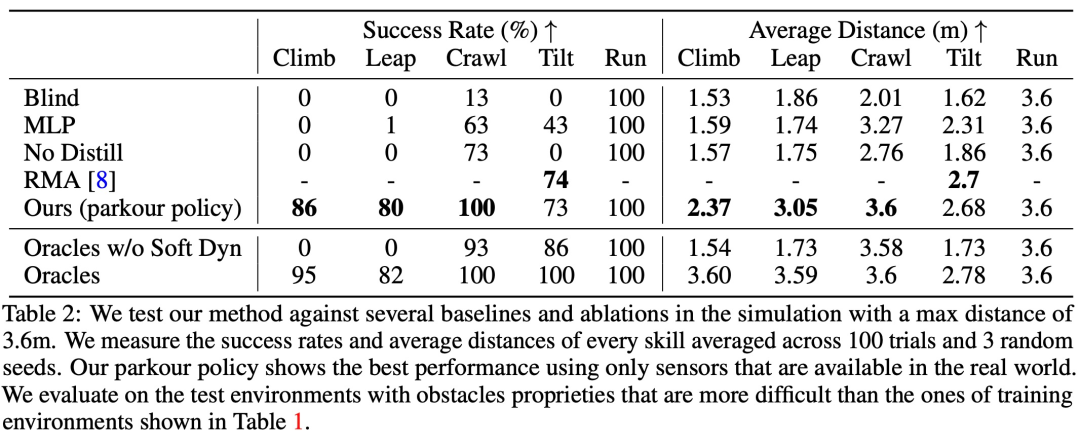
또한 연구에서는 제안된 방법을 여러 기본 방법과 비교하고 시뮬레이션 환경에서 절제 실험을 수행했습니다. 구체적인 결과는 표 2에 나와 있습니다.
관심 있는 독자는 원본 논문을 읽고 연구 내용에 대해 자세히 알아볼 수 있습니다
위 내용은 오르고, 점프하고, 좁은 틈을 건너는 오픈소스 강화학습 전략으로 로봇견 파쿠르 가능의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7663
7663
 15
1393
52
1205
24
91
11
73
19
15
1393
52
1205
24
91
11
73
19

 Web3 Trading Platform Ranking_Web3 글로벌 교환 상위 10 개 요약
Apr 21, 2025 am 10:45 AM
Web3 Trading Platform Ranking_Web3 글로벌 교환 상위 10 개 요약
Apr 21, 2025 am 10:45 AM
Binance는 Global Digital Asset Trading Ecosystem의 대 군주이며, 그 특성에는 다음이 포함됩니다. 1. 평균 일일 거래량은 1,500 억 달러를 초과하여 주류 통화의 98%를 차지하며 500 개의 거래 쌍을 지원합니다. 2. 혁신 매트릭스는 파생 상품 시장, Web3 레이아웃 및 교육 시스템을 포함합니다. 3. 기술적 이점은 밀리 초에 일치하는 엔진이며, 최고 처리량은 초당 140 만 건의 트랜잭션입니다. 4. 규정 준수 진행 상황은 15 개국 라이센스를 보유하고 있으며 유럽과 미국에 준수 엔티티를 설립합니다.
 ETH 업그레이드 후 손실을 피하는 방법
Apr 21, 2025 am 10:03 AM
ETH 업그레이드 후 손실을 피하는 방법
Apr 21, 2025 am 10:03 AM
ETH 업그레이드 후, 초보자는 손실을 피하기 위해 다음 전략을 채택해야합니다. 1. 숙제를하고 기본 지식과 ETH의 업그레이드 내용을 이해합니다. 2. 통제 위치, 소량으로 물을 테스트하고 투자를 다각화합니다. 3. 거래 계획을 세우고 목표를 명확하게하고 중지 손실 지점을 설정하십시오. 4. 합리적으로 프로파일 링하고 정서적 의사 결정을 피하십시오. 5. 공식적이고 안정적인 거래 플랫폼을 선택하십시오. 6. 단기 변동의 영향을 피하기 위해 장기 보유를 고려하십시오.
 Top 10 Cryptocurrency Exchange 플랫폼 세계 최대의 디지털 환전 목록
Apr 21, 2025 pm 07:15 PM
Top 10 Cryptocurrency Exchange 플랫폼 세계 최대의 디지털 환전 목록
Apr 21, 2025 pm 07:15 PM
거래소는 오늘날의 cryptocurrency 시장에서 중요한 역할을합니다. 그들은 투자자들이 거래 할 수있는 플랫폼 일뿐 만 아니라 시장 유동성 및 가격 발견의 중요한 원천이기도합니다. 세계 최대의 가상 환전 거래소는 상위 10 위이며, 이러한 거래소는 거래량이 훨씬 앞서있을뿐만 아니라 사용자 경험, 보안 및 혁신적인 서비스에서 고유 한 장점이 있습니다. 목록 위에있는 교환은 일반적으로 대규모 사용자 기반과 광범위한 시장 영향을 미치며 거래량 및 자산 유형은 종종 다른 거래소에서 도달하기가 어렵습니다.
 가상 통화 가격의 상승 또는 하락은 왜입니까? 가상 통화 가격의 상승 또는 하락은 왜입니까?
Apr 21, 2025 am 08:57 AM
가상 통화 가격의 상승 또는 하락은 왜입니까? 가상 통화 가격의 상승 또는 하락은 왜입니까?
Apr 21, 2025 am 08:57 AM
가상 통화 가격 상승의 요인은 다음과 같습니다. 1. 시장 수요 증가, 2. 공급 감소, 3. 긍정적 인 뉴스, 4. 낙관적 시장 감정, 5. 거시 경제 환경; 감소 요인에는 다음이 포함됩니다. 1. 시장 수요 감소, 2. 공급 증가, 3. 부정적인 뉴스의 파업, 4. 비관적 시장 감정, 5. 거시 경제 환경.
 환전 회계의 상위 10 개 플랫폼은 무엇입니까?
Apr 21, 2025 pm 12:21 PM
환전 회계의 상위 10 개 플랫폼은 무엇입니까?
Apr 21, 2025 pm 12:21 PM
최고 거래소에는 다음이 포함됩니다. 1. 세계 최대의 거래량 인 Binance는 600 개의 통화를 지원하며 스팟 취급 수수료는 0.1%입니다. 2. 균형 잡힌 플랫폼 인 OKX는 708 개의 거래 쌍을 지원하며 영구 계약 처리 수수료는 0.05%입니다. 3. Gate.io, 2700 개의 소규모 통화를 포괄하며 스팟 취급 수수료는 0.1%-0.3%입니다. 4. Coinbase, 미국 규정 준수 벤치 마크, 스팟 취급 수수료는 0.5%입니다. 5. Kraken, 최고 보안 및 정기 예약 감사.
 통화에서 레버리지 교환 순위 순위 서클 통화 서클에서 상위 10 개의 레버리지 거래소의 최신 권장 사항
Apr 21, 2025 pm 11:24 PM
통화에서 레버리지 교환 순위 순위 서클 통화 서클에서 상위 10 개의 레버리지 거래소의 최신 권장 사항
Apr 21, 2025 pm 11:24 PM
2025 년에 레버리지 거래, 보안 및 사용자 경험에서 뛰어난 성능을 보이는 플랫폼은 다음과 같습니다. 1. OKX, 고주파 거래자에게 적합하여 최대 100 배의 레버리지를 제공합니다. 2. Binance, 전 세계의 다중 통화 거래자에게 적합하며 125 배 높은 레버리지를 제공합니다. 3. Gate.io, 전문 파생 상품 플레이어에게 적합하며 100 배의 레버리지를 제공합니다. 4. 초보자 및 소셜 트레이더에게 적합한 Bitget, 최대 100 배의 레버리지를 제공합니다. 5. 크라켄은 꾸준한 투자자에게 적합하며 5 배의 레버리지를 제공합니다. 6. Bybit, Altcoin Explorers에 적합하며 20 배의 레버리지를 제공합니다. 7. 저비용 거래자에게 적합한 Kucoin, 10 배의 레버리지를 제공합니다. 8. 비트 피 넥스, 시니어 플레이에 적합합니다
 크로스 체인 거래는 무엇을 의미합니까? 크로스 체인 거래는 무엇입니까?
Apr 21, 2025 pm 11:39 PM
크로스 체인 거래는 무엇을 의미합니까? 크로스 체인 거래는 무엇입니까?
Apr 21, 2025 pm 11:39 PM
크로스 체인 거래를 지원하는 교환 : 1. Binance, 2. Uniswap, 3. Sushiswap, 4. Curve Finance, 5. Thorchain, 6. 1inch Exchange, 7. DLN 거래,이 플랫폼은 다양한 기술을 통해 다중 체인 자산 거래를 지원합니다.
 Worldcoin (WLD) 가격 예측 2025-2031 : WLD가 2031 년까지 4 달러에 도달 할 것인가?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD) 가격 예측 2025-2031 : WLD가 2031 년까지 4 달러에 도달 할 것인가?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD)은 Cryptocurrency 시장에서 고유 한 생체 인정 및 개인 정보 보호 메커니즘으로 눈에 띄고 많은 투자자의 관심을 끌고 있습니다. WLD는 혁신적인 기술, 특히 OpenAi 인공 지능 기술과 함께 Altcoins에서 뛰어난 성과를 거두었습니다. 그러나 향후 몇 년 안에 디지털 자산은 어떻게 행동 할 것인가? WLD의 미래 가격을 함께 예측합시다. 2025 WLD 가격 예측은 2025 년 WLD에서 상당한 성장을 달성 할 것으로 예상됩니다. 시장 분석에 따르면 평균 WLD 가격은 최대 $ 1.36로 $ 1.31에 도달 할 수 있습니다. 그러나 곰 시장에서 가격은 약 $ 0.55로 떨어질 수 있습니다. 이러한 성장 기대는 주로 WorldCoin2에 기인합니다.
