

Microsoft AR/VR 특허는 다중 카메라 이미지 정렬을 위한 각도 및 선 기능 사용을 제안합니다.

MR 시스템은 여러 대의 카메라를 사용할 수 있지만 이미지를 렌더링할 때 이미지를 정렬해야 합니다. 그러나 이미지 정렬은 어려운 문제입니다. 이에 Microsoft는 "코너 및 라인 특징을 이용한 이미지 정렬 방법"이라는 특허 출원에서 솔루션을 제안했습니다
물론, 이미지 정렬을 위해 각도 기능을 사용하는 방법은 이미 업계에 존재했습니다. 그러나 이미지의 모서리를 식별하고 식별된 모서리를 기준으로 이미지를 정렬하는 것은 시간이 많이 걸리고 계산 집약적인 작업입니다.
Microsoft가 제안하는 것은 더 나은 기능 일치를 달성할 수 있는 보다 효과적인 개선 기술입니다. 본 발명은 시각적 정렬을 수행하기 위해 모서리 특징과 선 특징을 사용하는 하이브리드 방법을 주로 도입하며, 이 솔루션은 정렬 프로세스에 필요한 제약을 줄여 계산 효율성과 특징 매칭을 향상시킵니다.
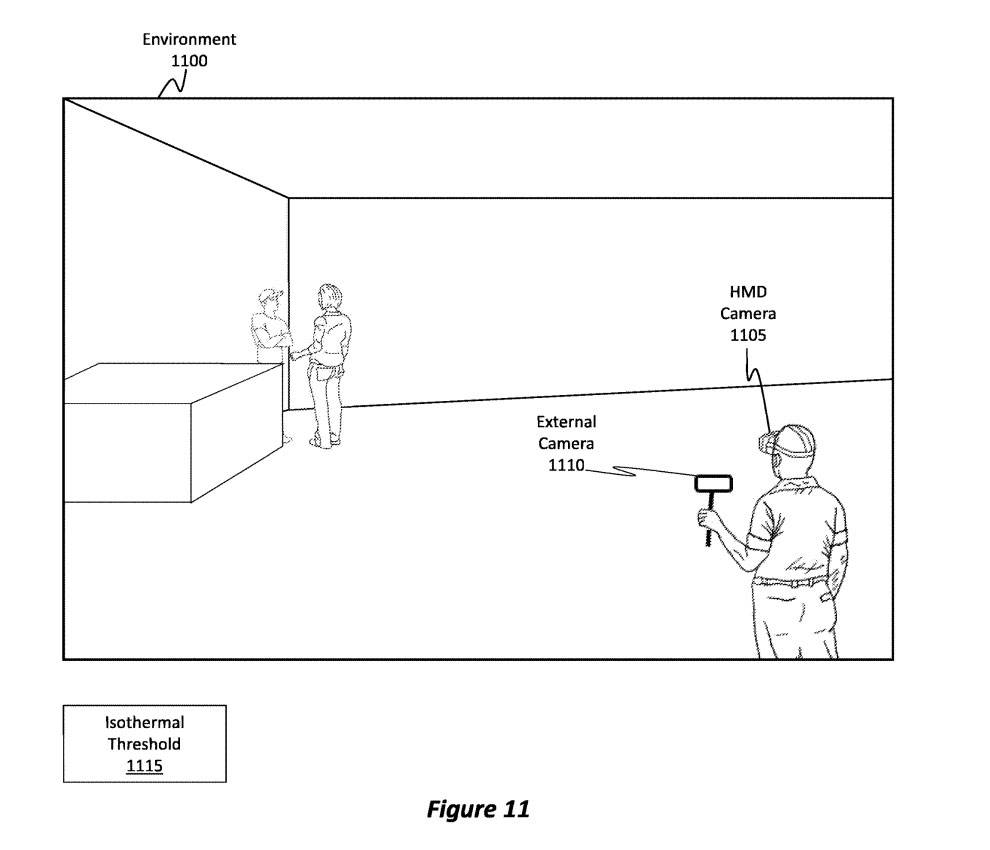
그림 11은 사용자가 머리 장착형 카메라(1105)와 외부 카메라(1110)를 사용하고 있는 예시적인 환경(1100)을 보여줍니다. 앞서 언급한 것처럼 두 카메라에서 생성된 이미지 콘텐츠를 정렬해야 합니다. 그러나 환경(1100)은 저조도 환경일 수도 있고 열 구배나 대비 측면에서 대비가 낮은 환경일 수도 있습니다.
예를 들어 밤늦게 물체가 식은 후 환경의 온도 구배는 일반적으로 균일할 수 있습니다. 이 경우, 환경의 온도 프로파일 또는 구배는 특정 등온 임계값(1115)보다 낮을 수 있습니다. 이 경우 콘텐츠 정렬을 위한 기존 기술이 실패할 수 있습니다. Microsoft가 설명하는 실시예는 이러한 시나리오에 대한 솔루션을 제공합니다.
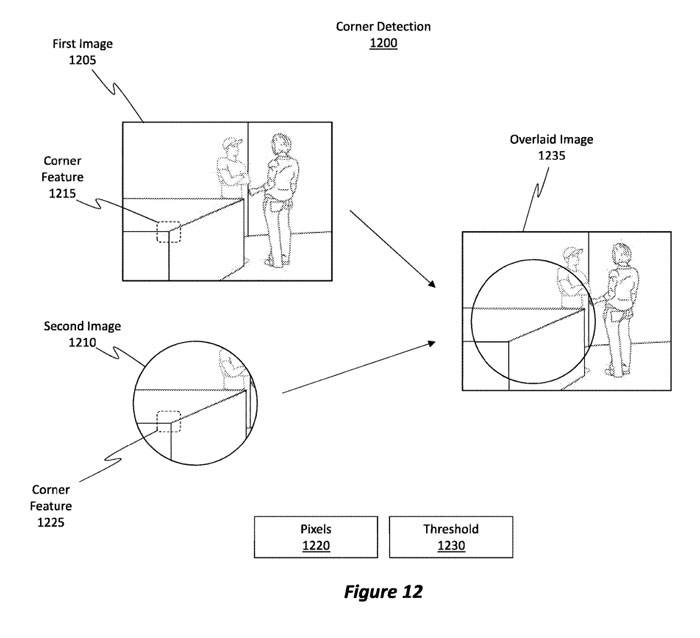
그림 12는 이미지를 정렬하는 데 사용할 수 있는 모서리 감지 1200 프로세스의 예를 보여줍니다. 도 12는 도 11의 머리 장착형 카메라(1105)에 의해 생성된 제1 이미지(1205)와 외부 카메라(1110)에 의해 생성된 제2 이미지(1210)를 도시한다.
모서리 감지 작업을 수행하여 이미지에 있는 "모서리"를 식별합니다. 예를 들어, 실시예는 첫 번째 이미지에서 코너 특징을 식별하는 데 사용될 수 있습니다. 즉, 이미지에서 각도에 해당하는 픽셀 집합을 식별하는 것이 가능합니다
"코너"는 상기 하나 이상의 픽셀에 대해 수평으로 배치된 인근 픽셀의 첫 번째 블록과 상기 하나 이상의 픽셀에 대해 수직으로 배치된 세 번째 픽셀 블록을 갖는 불균일한 강도의 픽셀 또는 픽셀들을 의미합니다. . 근처에 있는 두 개의 픽셀 블록. 즉, 모서리는 픽셀 세트를 기준으로 X 및 Y 방향으로 인접한 모서리와 대비되는 하나 이상의 픽셀 세트로 정의됩니다.
첫 번째 이미지 1205에서 모서리 특징 1215를 식별하고, 두 번째 이미지 1210에서도 모서리 특징을 식별합니다. 따라서 코너 특징(1225)이 성공적으로 식별되었습니다. 각도 특징 1225는 각도 특징 1215
에 해당한다는 점에 유의해야 합니다.이미지 콘텐츠를 정렬하기 위해 이 실시예에서는 1230개 모서리의 임계값을 식별하는 작업을 수행합니다. 모서리의 임계값 개수는 서로 일치해야 합니다. 즉, 첫 번째 이미지 1205에서 식별된 여러 모서리가 식별되어야 하며 두 번째 이미지 1210에서 식별된 여러 모서리에 대응해야 합니다.
이러한 임계값이 충족되면 실시예는 이미지 정렬 작업을 수행하여 오버레이 이미지(1235)를 생성할 수 있습니다. 오버레이 이미지는 두 번째 이미지(1210)의 콘텐츠가 정렬된 후 첫 번째 이미지(1205)의 해당 콘텐츠와 오버레이되는 이미지입니다.
모서리 감지 및 정렬을 수행하는 것은 계산 집약적인 작업이며, 감지된 모서리와 이미지 간의 일치가 충분하지 않으면 전체 프로세스가 실패할 수 있습니다. 예를 들어, 꼭지점만을 사용하는 방법은 하나의 이미지에서 최소 5개의 꼭지점을 식별한 다음 이를 두 번째 이미지의 해당 꼭지점과 일치시켜야 합니다. 대비가 낮은 조건에서는 해당 모서리 지점 5개를 식별하는 것조차 어려울 수 있습니다
충분한 수의 모서리를 식별한 후 실시예에서는 5개의 모서리를 서로 정렬하기 위해 다양한 회전 및 변환을 수행하여 첫 번째 또는 두 번째 이미지의 이미지 콘텐츠를 다른 이미지에 적용하기 위해 모션 모델을 사용하여 3D 회전을 식별합니다. 영상. 이러한 정렬을 수행하는 것은 계산 집약적입니다.
따라서 각도 방법만 사용할 때 존재하는 제약 조건을 줄여야 하며 그림 13은 그러한 기술을 보여줍니다.
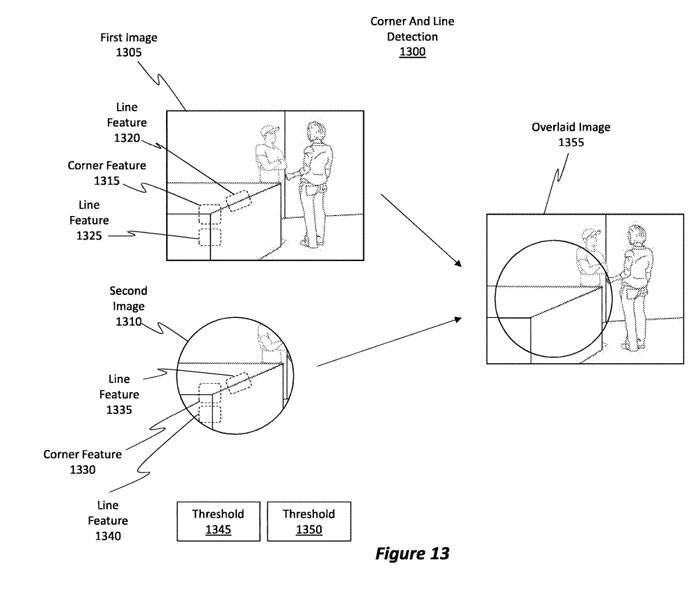
모서리점 및 선점 감지(1300) 프로세스는 그림 13에 나와 있습니다. 이 프로세스에는 그림 12의 모서리점 감지(1200) 작업과 선점 감지 작업의 조합이 포함됩니다. 코너 감지 작업과 라인 감지 작업은 동시에 수행된다는 점에 유의하세요
일반적으로 모서리를 식별하는 것보다 이미지에서 해당 "선"을 식별하는 것이 더 간단하므로 일반적으로 선 감지 프로세스가 모서리 감지 프로세스보다 빠릅니다. 두 프로세스가 병렬로 실행될 수 있고 라인 감지 프로세스가 더 빠르기 때문에 라인 감지 프로세스를 추가해도 전체 정렬 프로세스의 속도에 부정적인 영향을 미치지 않습니다
선을 사용하여 이미지를 정렬하면 정렬 과정에서 더 적은 수의 모서리를 사용할 수 있으므로 제약 조건이 완화되고 일반적으로 정렬이 더 쉬워집니다. 특히 저온 조건에서는 코너를 찾아 일치시키기 어려울 수 있으므로 더 적은 코너가 필요한 것이 매우 유익합니다
"라인"은 수평으로 배치된 하나 이상의 픽셀 세트에 대해 수평으로 배치된 첫 번째 인근 픽셀 블록에 대해 균일한 강도를 갖고 하나 이상의 픽셀 집합에 대해 균일한 강도를 갖는 하나 이상의 픽셀 그룹으로 정의됩니다. 더 많은 픽셀 수직으로 배치된 두 번째 근처 픽셀 블록의 균일하지 않은 강도입니다. 대안적으로, 하나 이상의 픽셀 세트 중 수평으로 위치한 첫 번째 인접 픽셀 블록에 대해서는 균일한 강도를 갖고, 하나 이상의 픽셀 세트에 대해 수직으로 위치한 두 번째 인접 픽셀 블록에 대해서는 균일한 강도를 갖습니다.
그림 13에는 그림 12의 이미지를 나타내는 첫 번째 이미지(1305)와 두 번째 이미지(1310)가 표시되어 있습니다. 그림 13은 또한 첫 번째 이미지 1305에서 코너 특징 1315를 감지할 수 있는 구현 방법을 보여줍니다.
첫 번째 이미지(1305)에서 모서리 특징을 감지하면 선 특징(1320, 1325)과 같이 선 특징도 동시에 감지됩니다. 일반적으로 감지할 수 있는 모서리 수보다 더 많은 선을 감지할 수 있습니다두 번째 이미지 1310에서 각도 및 선 작업을 수행합니다. 설명을 위해 실시예에서는 코너 특징부(1330)를 식별합니다. 코너 감지 작업과 병행하여 실시예는 라인 특징(1335) 및 라인 특징(1340)과 같은 제2 이미지(1310)의 라인을 동시에 감지합니다.
모서리 기능 1330은 모서리 기능 1315에 해당하고 선 기능 1335는 선 기능 1320에 해당합니다. 라인 특징(1340)은 라인 특징(1325)에 대응한다. 실시예에서는 이러한 대응 관계를 식별한 다음 이러한 특징점을 서로 정렬하는 데 적합한 모션 모델을 생성하거나 사용할 수 있습니다
발명원리를 바탕으로 첫 번째 임계값을 1345로 정의했습니다. 첫 번째 임계값은 두 이미지를 정렬하기 위해 식별해야 하는 해당 각도 특징의 수를 나타냅니다. 동시에 두 번째 임계값인 1350도 정의합니다. 두 번째 임계값은 두 이미지를 정렬하기 위해 두 이미지에서 식별해야 하는 해당 행 특징의 수를 나타냅니다.
제1 임계값(1345)과 제2 임계값(1350)이 만족되면 실시예는 오버레이 이미지(1355)를 생성하기 위해 제1 이미지(1305)와 제2 이미지(1310)의 콘텐츠를 정렬할 수 있습니다. 임계값은 일반적으로 인식되어야 하는 모서리와 선의 총 개수를 나타냅니다.
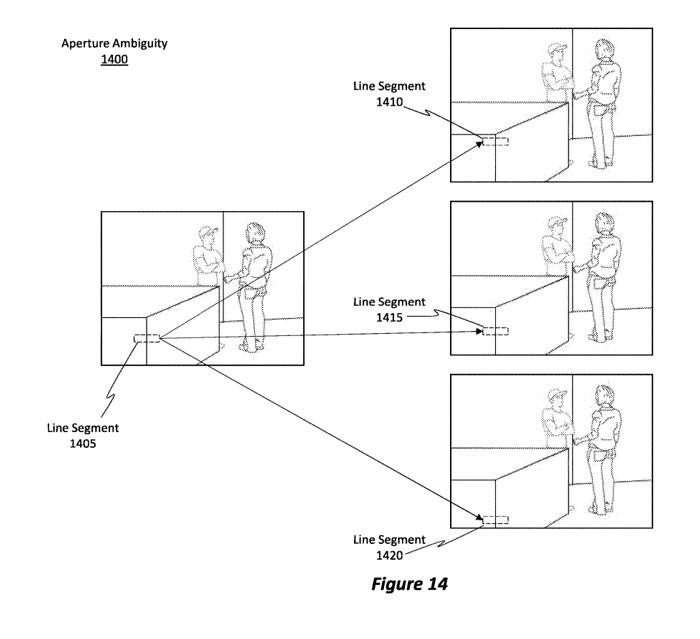
라인 특징 감지 수행의 편리성과 속도를 이해한 후에 실시예가 왜 라인 감지 작업에만 의존하고 코너 감지 작업을 수행하지 않는지 의문이 생길 수 있습니다. 그 이유는 이미지에서 라인을 감지하면 조리개 문제가 발생하기 때문입니다.
 다음은 다시 작성한 내용입니다.
그림 14에 따르면 조리개 문제, 즉 조리개 모호성이 1400임을 알 수 있습니다. 도 14에서, 선분(1405)은 전체 선의 일부이다. 조리개 모호성(1400)은 선의 여러 다른 부분이 식별된 선분(1405)과 관련될 수 있다는 사실을 나타냅니다(그러나 부정확함).
다음은 다시 작성한 내용입니다.
그림 14에 따르면 조리개 문제, 즉 조리개 모호성이 1400임을 알 수 있습니다. 도 14에서, 선분(1405)은 전체 선의 일부이다. 조리개 모호성(1400)은 선의 여러 다른 부분이 식별된 선분(1405)과 관련될 수 있다는 사실을 나타냅니다(그러나 부정확함).
따라서 라인 감지 프로세스 자체에만 의존하는 것만으로는 기술이 충분하지 않습니다. 즉, 선과 각도의 조합에 의존하면 실시예가 완화된 제약 조건을 사용할 수 있으므로 계산 효율성이 향상됩니다.
샘플 프로세스 흐름 1500은 그림 15에 나와 있습니다. 먼저, 머리 장착형 카메라 영상(1505), 외부 카메라 영상(1510) 등의 영상 세트가 획득된다. 이러한 이미지는 열화상일 수 있습니다. 이미지의 온도 구배 또는 대비(1520)는 특정 대비 임계값(1525)보다 낮을 수 있습니다. 따라서 이미지에서 충분한 수의 모서리를 식별하는 것은 매우 어려울 수 있습니다. 이 경우 하이브리드 접근 방식을 활용하여 모서리와 선의 조합을 감지하여 정렬을 달성할 수 있습니다 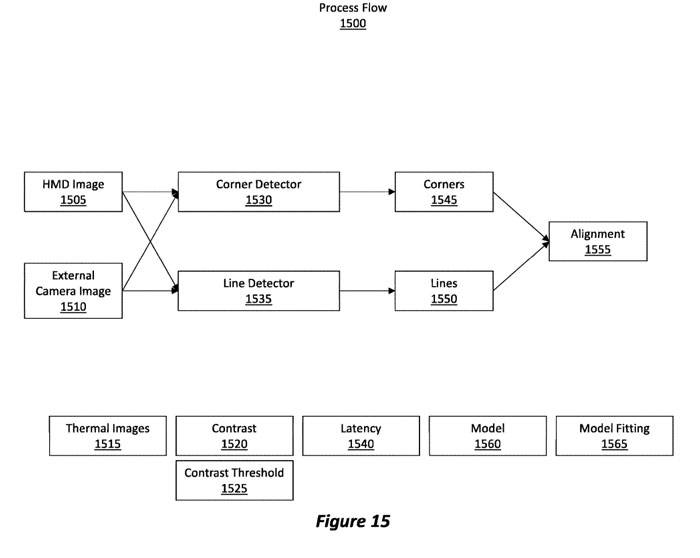
선 감지기 1535는 일반적으로 각도 감지에서 모서리 감지기 1530보다 선 감지 속도가 더 빠릅니다. 즉, 라인 검출기(1535)의 지연 시간은 코너 검출기(1530)의 지연 시간보다 짧습니다
코너 감지기(1530)는 두 이미지를 분석하고 이미지의 코너 지점(1545)을 식별합니다. 마찬가지로, 라인 검출기(1535)는 두 이미지를 분석하고 이미지에서 라인(1550)을 식별합니다. 그런 다음 실시예는 2개의 이미지 내에서 대응하는 모서리와 라인을 식별함으로써 정렬(1555)을 수행합니다.
정렬을 수행하려면 선과 모서리의 임계값 개수를 결정해야 합니다. 일치 임계값은 모서리 또는 선 수를 식별하는 임계값보다 더 관련성이 높습니다. 그런 다음 실시예는 식별된 모서리와 선을 모션 모델과 같은 3D 모델(1560)에 맞춥니다. 그 후 모델 피팅(1565) 작업이 모델(1560)에 대해 수행되어 하나의 이미지를 회전, 이동 및/또는 변환하여 다른 이미지의 해당 모서리 및 선과 일치하거나 정렬합니다.
즉, 재투영 작업을 수행할 때 이 실시예에서는 식별된 모서리와 선을 사용하여 한 이미지의 콘텐츠를 다른 이미지의 콘텐츠와 정렬합니다.
관련 특허: Microsoft 특허 | 모서리 및 선 기능을 사용한 이미지 정렬
"모퉁이 및 선 기능을 사용한 이미지 정렬"이라는 제목의 Microsoft 특허 출원은 원래 2022년 2월에 제출되었으며 최근 미국 특허청에 게시되었습니다.
위 내용은 Microsoft AR/VR 특허는 다중 카메라 이미지 정렬을 위한 각도 및 선 기능 사용을 제안합니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7470
7470
 15
1377
52
77
11
48
19
19
29
15
1377
52
77
11
48
19
19
29

 Microsoft Bing 국제 버전 입구 주소 (Bing 검색 엔진 입구)
Mar 14, 2024 pm 01:37 PM
Microsoft Bing 국제 버전 입구 주소 (Bing 검색 엔진 입구)
Mar 14, 2024 pm 01:37 PM
Bing은 Microsoft가 출시한 온라인 검색 엔진입니다. 검색 기능은 매우 강력하며 국내 버전과 해외 버전의 두 가지 입구가 있습니다. 이 두 버전의 입구는 어디에 있습니까? 국제 버전에 액세스하는 방법은 무엇입니까? 아래에서 자세한 내용을 살펴보겠습니다. Bing 중국어 버전 웹 사이트 입구: https://cn.bing.com/ Bing 국제 버전 웹 사이트 입구: https://global.bing.com/ Bing 국제 버전에 액세스하는 방법은 무엇입니까? 1. 먼저 Bing을 열려면 URL을 입력하세요: https://www.bing.com/ 2. 국내 버전과 해외 버전에 대한 옵션이 있는 것을 볼 수 있습니다. 국제 버전을 선택하고 키워드만 입력하면 됩니다.
 Microsoft의 전체 화면 팝업은 Windows 10 사용자에게 서둘러 Windows 11로 업그레이드하도록 촉구합니다.
Jun 06, 2024 am 11:35 AM
Microsoft의 전체 화면 팝업은 Windows 10 사용자에게 서둘러 Windows 11로 업그레이드하도록 촉구합니다.
Jun 06, 2024 am 11:35 AM
6월 3일자 뉴스에 따르면, 마이크로소프트는 모든 윈도우 10 사용자에게 적극적으로 전체 화면 알림을 보내 윈도우 11 운영체제로의 업그레이드를 독려하고 있다. 이 이동에는 하드웨어 구성이 새 시스템을 지원하지 않는 장치가 포함됩니다. 2015년부터 Windows 10은 거의 70%의 시장 점유율을 차지하며 Windows 운영 체제로서의 지배력을 확고히 자리 잡았습니다. 하지만 시장점유율은 82%를 훨씬 웃돌며, 2021년 출시 예정인 윈도우 11보다 시장점유율이 훨씬 높다. Windows 11이 출시된 지 거의 3년이 지났지만 시장 침투 속도는 여전히 느립니다. Microsoft는 Windows 10에 대한 기술 지원을 2025년 10월 14일 이후 종료한다고 발표했습니다.
 마이크로소프트, 보안 강화, 잠금 화면 최적화 등 Win11 8월 누적 업데이트 출시
Aug 14, 2024 am 10:39 AM
마이크로소프트, 보안 강화, 잠금 화면 최적화 등 Win11 8월 누적 업데이트 출시
Aug 14, 2024 am 10:39 AM
8월 14일 이 사이트의 소식에 따르면 오늘 8월 패치 화요일 이벤트 당일 마이크로소프트는 22H2와 23H2용 KB5041585 업데이트, 21H2용 KB5041592 업데이트를 포함해 윈도우 11 시스템용 누적 업데이트를 출시했다. 위 장비가 8월 누적 업데이트로 설치된 후, 본 사이트에 첨부된 버전번호 변경 사항은 다음과 같습니다. 21H2 장비 설치 후, 장비 설치 후 버전번호가 Build22000.314722H2로 증가되었습니다. Windows 1121H2용 KB5041585 업데이트의 주요 내용은 다음과 같습니다.
 Microsoft Edge 업그레이드: 자동 비밀번호 저장 기능이 금지되나요? ! 유저들은 충격을 받았습니다!
Apr 19, 2024 am 08:13 AM
Microsoft Edge 업그레이드: 자동 비밀번호 저장 기능이 금지되나요? ! 유저들은 충격을 받았습니다!
Apr 19, 2024 am 08:13 AM
4월 18일 뉴스: 최근 Canary 채널을 사용하는 Microsoft Edge 브라우저의 일부 사용자가 최신 버전으로 업그레이드한 후 비밀번호 자동 저장 옵션이 비활성화된 것을 발견했다고 보고했습니다. 조사 결과 이는 기능의 취소라기보다는 브라우저 업그레이드 이후의 소소한 조정인 것으로 밝혀졌습니다. Edge 브라우저를 사용하여 웹 사이트에 액세스하기 전에 사용자는 브라우저에서 웹 사이트의 로그인 비밀번호를 저장할 것인지 묻는 창을 표시한다고 보고했습니다. 저장을 선택하면 Edge는 다음 로그인 시 저장된 계정번호와 비밀번호를 자동으로 입력해 사용자에게 큰 편의성을 제공합니다. 그러나 최신 업데이트는 기본 설정을 변경하는 조정과 유사합니다. 사용자는 비밀번호를 저장하도록 선택한 다음 설정에서 저장된 계정 및 비밀번호 자동 채우기를 수동으로 켜야 합니다.
 신비한 CNEXLabs 컨트롤러를 탑재한 Microsoft Z1000 SSD가 온라인에 등장
Mar 11, 2024 pm 01:50 PM
신비한 CNEXLabs 컨트롤러를 탑재한 Microsoft Z1000 SSD가 온라인에 등장
Mar 11, 2024 pm 01:50 PM
3월 11일 이 사이트의 뉴스에 따르면 Yuki Yasuo-YuuKi_AnS 소스는 최근 X 플랫폼의 Microsoft Z1000 SSD 샘플 사진 시리즈를 공유했습니다. 라벨 정보를 통해 이 Z1000은 960GB 용량의 엔지니어링 샘플(엔지니어링 샘플)이라는 것을 알게 되었습니다. 이 제품은 2020년 5월 18일에 생산되었습니다. 전원은 DC3.3V이고 공칭 전력 소비는 15W입니다. 소식통에 따르면 NVMe1.2 프로토콜을 지원합니다. ▲Microsoft Z1000 SSD 전면 사진(라벨 있음) ▲Microsoft Z1000 SSD 전면 사진(라벨 없음) ▲Microsoft Z1000 SSD 후면 사진 ▲Microsoft Z1000 SSD 후면 사진 - 메인 컨트롤 클로즈업 참조 Yuuki Yasuho-YuuKi_An
 Microsoft Win11의 7z 및 TAR 파일 압축 기능이 24H2에서 23H2/22H2 버전으로 다운그레이드되었습니다.
Apr 28, 2024 am 09:19 AM
Microsoft Win11의 7z 및 TAR 파일 압축 기능이 24H2에서 23H2/22H2 버전으로 다운그레이드되었습니다.
Apr 28, 2024 am 09:19 AM
4월 27일 이 사이트의 소식에 따르면 마이크로소프트는 이달 초 카나리아 및 개발자 채널에 윈도우 11 빌드 26100 프리뷰 버전 업데이트를 출시했는데, 이는 윈도우 1124H2 업데이트의 후보 RTM 버전이 될 것으로 예상된다. 새 버전의 주요 변경 사항은 파일 탐색기, Copilot 통합, PNG 파일 메타데이터 편집, TAR 및 7z 압축 파일 생성 등입니다. @PhantomOfEarth는 Microsoft가 TAR 및 7z 압축 파일 생성과 같은 24H2 버전(게르마늄)의 일부 기능을 23H2/22H2(니켈) 버전으로 위임했다는 사실을 발견했습니다. 다이어그램에 표시된 것처럼 Windows 11은 TAR의 기본 생성을 지원합니다.
 Microsoft Edge 브라우저 업데이트: 사용자 경험 개선을 위해 '이미지 확대' 기능 추가
Mar 21, 2024 pm 01:40 PM
Microsoft Edge 브라우저 업데이트: 사용자 경험 개선을 위해 '이미지 확대' 기능 추가
Mar 21, 2024 pm 01:40 PM
3월 21일 뉴스에 따르면 마이크로소프트는 최근 마이크로소프트 엣지 브라우저를 업데이트하고 실용적인 '이미지 확대' 기능을 추가했다. 이제 Edge 브라우저를 사용할 때 사용자는 이미지를 마우스 오른쪽 버튼으로 클릭하기만 하면 팝업 메뉴에서 이 새로운 기능을 쉽게 찾을 수 있습니다. 더욱 편리한 점은 사용자가 이미지 위에 커서를 놓은 다음 Ctrl 키를 두 번 클릭하여 이미지 확대 기능을 빠르게 호출할 수도 있다는 것입니다. 편집자의 이해에 따르면 최근 출시된 Microsoft Edge 브라우저는 Canary 채널의 새로운 기능에 대해 테스트되었습니다. 안정적인 버전의 브라우저에서는 실용적인 "이미지 확대" 기능도 공식적으로 출시되어 사용자에게 더욱 편리한 이미지 탐색 경험을 제공합니다. 해외 과학기술 언론도 이에 주목했다.
 Microsoft는 2024년 하반기에 Windows 11에서 NTLM을 단계적으로 폐지하고 Kerberos 인증으로 완전히 전환할 계획입니다.
Jun 09, 2024 pm 04:17 PM
Microsoft는 2024년 하반기에 Windows 11에서 NTLM을 단계적으로 폐지하고 Kerberos 인증으로 완전히 전환할 계획입니다.
Jun 09, 2024 pm 04:17 PM
2024년 하반기, 마이크로소프트 공식 보안 블로그는 보안 커뮤니티의 요청에 대한 응답으로 메시지를 게시했습니다. 회사는 보안 강화를 위해 2024년 하반기 출시되는 윈도우 11에서 NTLM(NTLAN Manager) 인증 프로토콜을 삭제할 계획이다. 이전 설명에 따르면 Microsoft는 이전에도 비슷한 조치를 취한 적이 있습니다. 작년 10월 12일 Microsoft는 공식 보도 자료를 통해 NTLM 인증 방법을 단계적으로 폐지하고 더 많은 기업과 사용자가 Kerberos로 전환하도록 유도하는 전환 계획을 제안했습니다. NTLM 인증을 끈 후 유선 응용 프로그램 및 서비스에 문제가 발생할 수 있는 기업을 돕기 위해 Microsoft는 IAKerb 및
