

강화 학습의 보상 기능 설계 문제

강화 학습의 보상 함수 설계 문제
소개
강화 학습은 에이전트와 환경 간의 상호 작용을 통해 최적의 전략을 학습하는 방법입니다. 강화 학습에서는 보상 기능의 설계가 에이전트의 학습 효과에 매우 중요합니다. 이 기사에서는 강화 학습의 보상 함수 설계 문제를 살펴보고 구체적인 코드 예제를 제공합니다.
- 보상 함수의 역할과 목표
보상 함수는 강화학습의 중요한 부분으로 특정 상태에서 에이전트가 얻는 보상 값을 평가하는 데 사용됩니다. 그 디자인은 에이전트가 최적의 행동을 선택하여 장기 누적 보상을 극대화하도록 안내하는 데 도움이 됩니다.
좋은 보상 기능에는 다음 두 가지 목표가 있어야 합니다.
(1) 에이전트가 최적의 전략을 학습할 수 있도록 충분한 정보를 제공합니다.
(2) 행동에 대한 적절한 보상 피드백을 통해 에이전트가 비효율적이고 유해한 행동을 피하도록 안내합니다. 의.
- 보상 함수 설계의 과제
보상 함수 설계는 다음과 같은 과제에 직면할 수 있습니다.
(1) 희소성: 경우에 따라 환경의 보상 신호가 희박하여 학습 과정이 느리거나 불안정할 수 있습니다.
(2) 오해의 소지가 있음: 부정확하거나 불충분한 보상 신호로 인해 에이전트가 잘못된 전략을 배우게 될 수 있습니다.
(3) 높은 차원성: 상태와 행동의 수가 많은 복잡한 환경에서는 보상 기능을 설계하기가 더 어려워집니다.
(4) 목표 충돌: 목표가 다르면 단기 목표와 장기 목표의 균형 등 보상 기능 설계에서 충돌이 발생할 수 있습니다. - 보상 함수 설계 방법
보상 함수 설계의 과제를 극복하려면 다음 방법을 사용할 수 있습니다.
(1) 수동 설계: 사전 지식과 경험을 바탕으로 보상 함수를 수동으로 설계합니다. 이 접근 방식은 일반적으로 간단한 문제에는 효과적이지만 복잡한 문제에는 어려울 수 있습니다.
(2) 보상 엔지니어링: 보조 보상이나 페널티를 도입하여 보상 기능의 성능을 향상합니다. 예를 들어 에이전트 학습을 더 잘 안내하기 위해 특정 상태나 작업에 추가 보상이나 페널티가 적용될 수 있습니다.
(3) 적응형 보상 기능: 적응형 알고리즘을 사용하여 보상 기능을 동적으로 조정합니다. 이 방법은 다양한 단계의 학습 요구에 적응하기 위해 시간이 지남에 따라 보상 함수의 가중치를 변경할 수 있습니다.
- 특정 코드 예제
다음은 보상 함수가 어떻게 설계되었는지 보여주는 심층 강화 학습 프레임워크 TensorFlow 및 Keras를 사용하는 예제 코드입니다.
import numpy as np
from tensorflow import keras
# 定义强化学习智能体的奖励函数
def reward_function(state, action):
# 根据当前状态和动作计算奖励值
reward = 0
# 添加奖励和惩罚条件
if state == 0 and action == 0:
reward += 1
elif state == 1 and action == 1:
reward -= 1
return reward
# 定义强化学习智能体的神经网络模型
def create_model():
model = keras.Sequential([
keras.layers.Dense(64, activation='relu', input_shape=(2,)),
keras.layers.Dense(64, activation='relu'),
keras.layers.Dense(1)
])
model.compile(optimizer='adam', loss='mean_squared_error')
return model
# 训练智能体
def train_agent():
model = create_model()
# 智能体的训练过程
for episode in range(num_episodes):
state = initial_state
# 智能体根据当前策略选择动作
action = model.predict(state)
# 获得当前状态下的奖励值
reward = reward_function(state, action)
# 更新模型的权重
model.fit(state, reward)위 코드에서는 award_function 함수를 정의하여 보상 함수를 설계합니다. , 에서는 에이전트를 훈련할 때 현재 상태와 행동을 기반으로 보상 값을 계산합니다. 동시에 create_model 함수를 사용하여 에이전트를 훈련하기 위한 신경망 모델을 생성하고, model.predict 함수를 사용하여 현재 전략에 따라 작업을 선택합니다.
결론
강화 학습에서 보상 기능 설계는 중요하면서도 어려운 문제입니다. 올바르게 설계된 보상 기능은 에이전트가 최적의 전략을 학습하도록 효과적으로 안내할 수 있습니다. 보상 기능의 역할과 목표, 설계 과제, 특정 코드 예제를 논의함으로써 이 기사는 독자에게 강화 학습에서 보상 기능 설계에 대한 참조와 영감을 제공하기를 바랍니다.
위 내용은 강화 학습의 보상 기능 설계 문제의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7488
7488
 15
1377
52
77
11
52
19
19
40
15
1377
52
77
11
52
19
19
40

 강화 학습의 보상 기능 설계 문제
Oct 09, 2023 am 11:58 AM
강화 학습의 보상 기능 설계 문제
Oct 09, 2023 am 11:58 AM
강화학습의 보상 함수 설계 문제 서론 강화학습은 에이전트와 환경 간의 상호작용을 통해 최적의 전략을 학습하는 방법입니다. 강화 학습에서는 보상 기능의 설계가 에이전트의 학습 효과에 매우 중요합니다. 이 기사에서는 강화 학습의 보상 함수 설계 문제를 살펴보고 구체적인 코드 예제를 제공합니다. 보상 함수의 역할과 목표 보상 함수는 강화학습의 중요한 부분으로 에이전트가 특정 상태에서 얻는 보상 값을 평가하는 데 사용됩니다. 이 설계는 에이전트가 최적의 작업을 선택하여 장기적인 피로를 극대화하도록 안내하는 데 도움이 됩니다.
 Panda-Gym의 로봇팔 시뮬레이션을 이용한 Deep Q-learning 강화학습
Oct 31, 2023 pm 05:57 PM
Panda-Gym의 로봇팔 시뮬레이션을 이용한 Deep Q-learning 강화학습
Oct 31, 2023 pm 05:57 PM
강화 학습(RL)은 에이전트가 시행착오를 통해 환경에서 행동하는 방법을 학습할 수 있는 기계 학습 방법입니다. 에이전트는 원하는 결과로 이어지는 조치를 취한 것에 대해 보상을 받거나 처벌을 받습니다. 시간이 지남에 따라 에이전트는 예상 보상을 최대화하는 조치를 취하는 방법을 학습합니다. RL 에이전트는 일반적으로 순차적 결정 문제를 모델링하기 위한 수학적 프레임워크인 Markov 결정 프로세스(MDP)를 사용하여 교육됩니다. MDP는 네 부분으로 구성됩니다. 상태: 환경의 가능한 상태 집합입니다. 작업: 에이전트가 수행할 수 있는 일련의 작업입니다. 전환 함수(Transition function): 현재 상태와 동작을 고려하여 새로운 상태로 전환할 확률을 예측하는 함수입니다. 보상 기능: 각 전환에 대해 에이전트에게 보상을 할당하는 기능입니다. 에이전트의 목표는 정책 기능을 학습하는 것입니다.
 C++의 심층 강화 학습 기술
Aug 21, 2023 pm 11:33 PM
C++의 심층 강화 학습 기술
Aug 21, 2023 pm 11:33 PM
심층 강화 학습 기술은 많은 주목을 받고 있는 인공 지능의 한 분야로, 여러 국제 대회에서 우승했으며 개인 비서, 자율 주행, 게임 지능 등의 분야에서도 널리 사용되고 있습니다. 심층 강화학습을 구현하는 과정에서 효율적이고 우수한 프로그래밍 언어인 C++는 하드웨어 자원이 제한되어 있는 경우 특히 중요합니다. 심층 강화 학습은 이름에서 알 수 있듯이 심층 학습과 강화 학습이라는 두 분야의 기술을 결합합니다. 딥러닝이란 간단히 이해하면, 다층 신경망을 구축하여 데이터로부터 특징을 학습하고 의사결정을 내리는 것을 의미합니다.
 강화학습의 또 다른 혁명! DeepMind는 탐색 가능한 사전 훈련된 강화 학습 Transformer인 '알고리즘 증류'를 제안합니다.
Apr 12, 2023 pm 06:58 PM
강화학습의 또 다른 혁명! DeepMind는 탐색 가능한 사전 훈련된 강화 학습 Transformer인 '알고리즘 증류'를 제안합니다.
Apr 12, 2023 pm 06:58 PM
Transformer는 현재 시퀀스 모델링 작업을 위한 가장 강력한 신경망 아키텍처라고 할 수 있으며 사전 훈련된 Transformer 모델은 프롬프트를 조건 또는 상황 내 학습으로 사용하여 다양한 다운스트림 작업에 적응할 수 있습니다. 대규모 사전 학습된 Transformer 모델의 일반화 능력은 텍스트 완성, 언어 이해, 이미지 생성 등 여러 분야에서 검증되었습니다. 작년부터 오프라인 강화 학습(오프라인 RL)을 시퀀스 예측 문제로 처리하여 모델이 오프라인 데이터로부터 정책을 학습할 수 있음을 입증하는 관련 연구가 있었습니다. 그러나 현재 접근 방식은 학습이 포함되지 않은 데이터에서 정책을 학습하거나
 Go 언어를 사용하여 심층 강화 학습 연구를 수행하는 방법은 무엇입니까?
Jun 10, 2023 pm 02:15 PM
Go 언어를 사용하여 심층 강화 학습 연구를 수행하는 방법은 무엇입니까?
Jun 10, 2023 pm 02:15 PM
심층 강화 학습(DeepReinforcementLearning)은 딥 러닝과 강화 학습을 결합한 고급 기술로 음성 인식, 이미지 인식, 자연어 처리 등의 분야에서 널리 사용됩니다. 빠르고 효율적이며 안정적인 프로그래밍 언어인 Go 언어는 심층 강화 학습 연구에 도움을 줄 수 있습니다. 이 기사에서는 Go 언어를 사용하여 심층 강화 학습 연구를 수행하는 방법을 소개합니다. 1. Go 언어 및 관련 라이브러리를 설치하고 심층 강화 학습을 위해 Go 언어 사용을 시작합니다.
 Actor-Critic의 DDPG 강화 학습 알고리즘을 사용하여 이중 관절 로봇 팔 제어
May 12, 2023 pm 09:55 PM
Actor-Critic의 DDPG 강화 학습 알고리즘을 사용하여 이중 관절 로봇 팔 제어
May 12, 2023 pm 09:55 PM
이 기사에서는 UnityML-Agents 툴킷을 사용하여 개발된 Unity 기반 시뮬레이션 프로그램인 Reacher 환경에서 이중 관절 로봇 팔을 제어하기 위한 지능형 에이전트 교육을 소개합니다. 우리의 목표는 높은 정확도로 목표 위치에 도달하는 것입니다. 따라서 여기서는 연속 상태 및 행동 공간을 위해 설계된 최첨단 DDPG(DeepDeterministicPolicyGradient) 알고리즘을 사용할 수 있습니다. 실제 응용 로봇 팔은 제조, 생산 시설, 우주 탐사, 수색 및 구조 작업에서 중요한 역할을 합니다. 높은 정밀도와 유연성으로 로봇 팔을 제어하는 것은 매우 중요합니다. 강화 학습 기술을 사용하면 이러한 로봇 시스템이 실시간으로 행동을 학습하고 조정할 수 있습니다.
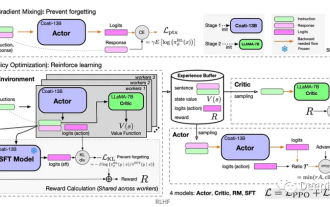
 강화 학습을 사용하여 Kuaishou 사용자 유지율을 향상시키는 방법은 무엇입니까?
May 07, 2023 pm 06:31 PM
강화 학습을 사용하여 Kuaishou 사용자 유지율을 향상시키는 방법은 무엇입니까?
May 07, 2023 pm 06:31 PM
짧은 동영상 추천 시스템의 핵심 목표는 사용자 유지율을 높여 DAU 성장을 촉진하는 것입니다. 따라서 리텐션은 각 APP의 핵심 비즈니스 최적화 지표 중 하나입니다. 그러나 리텐션은 사용자와 시스템 간의 여러 상호 작용 이후의 장기적인 피드백이므로 단일 항목이나 단일 목록으로 분해하기 어렵기 때문에 전통적인 포인트별 및 목록 방식으로는 리텐션을 직접적으로 최적화하기가 어렵습니다. 현명한 모델. 강화 학습(RL) 방법은 환경과 상호 작용하여 장기적인 보상을 최적화하며 사용자 유지를 직접적으로 최적화하는 데 적합합니다. 이 작업은 사용자가 추천 시스템에 작업 결정을 요청할 때마다 다양한 단기 피드백 추정치(시청 시간, 시청 시간)를 집계하는 데 사용됩니다.
 20분만에 회로 기판 조립 방법을 배워보세요! 오픈 소스 SERL 프레임워크는 100% 정밀 제어 성공률을 가지며 인간보다 3배 빠릅니다.
Feb 21, 2024 pm 03:31 PM
20분만에 회로 기판 조립 방법을 배워보세요! 오픈 소스 SERL 프레임워크는 100% 정밀 제어 성공률을 가지며 인간보다 3배 빠릅니다.
Feb 21, 2024 pm 03:31 PM
이제 로봇은 정밀한 공장 제어 작업을 배울 수 있습니다. 최근 몇 년간 네 발 걷기, 잡기, 손재주 조작 등 로봇 강화학습 기술 분야에서 상당한 진전이 있었지만 대부분은 실험실 실증 단계에 국한되어 있다. 로봇 강화 학습 기술을 실제 생산 환경에 광범위하게 적용하는 것은 여전히 많은 과제에 직면해 있으며, 이로 인해 실제 시나리오에서 적용 범위가 어느 정도 제한됩니다. 강화학습 기술을 실제 적용하는 과정에서는 보상 메커니즘 설정, 환경 재설정, 표본 효율성 향상, 행동 안전성 보장 등 여러 가지 복잡한 문제를 극복해야 합니다. 업계 전문가들은 강화학습 기술의 실제 구현에 있어서 많은 문제를 해결하는 것이 알고리즘 자체의 지속적인 혁신만큼 중요하다고 강조한다. 이러한 도전에 직면한 캘리포니아 대학, 버클리 대학, 스탠포드 대학, 워싱턴 대학의 연구자들은
