
로봇은 테이크아웃, 특급배송, 공항 안내, 건설 엔지니어링 검사 등 다양한 분야에서 널리 사용되고 있습니다. 하지만 어려운 점 중 하나는 군중 속에서 움직이는 것입니다
현재 로봇은 주변 환경을 관찰하기 위해 주로 카메라와 기타 센서에 의존합니다. 그러나 이 솔루션은 안정적이지 않고 주변 사람들이 동적으로 방향을 조정하므로 군중 장면에서 로봇을 사용하기가 어렵습니다.
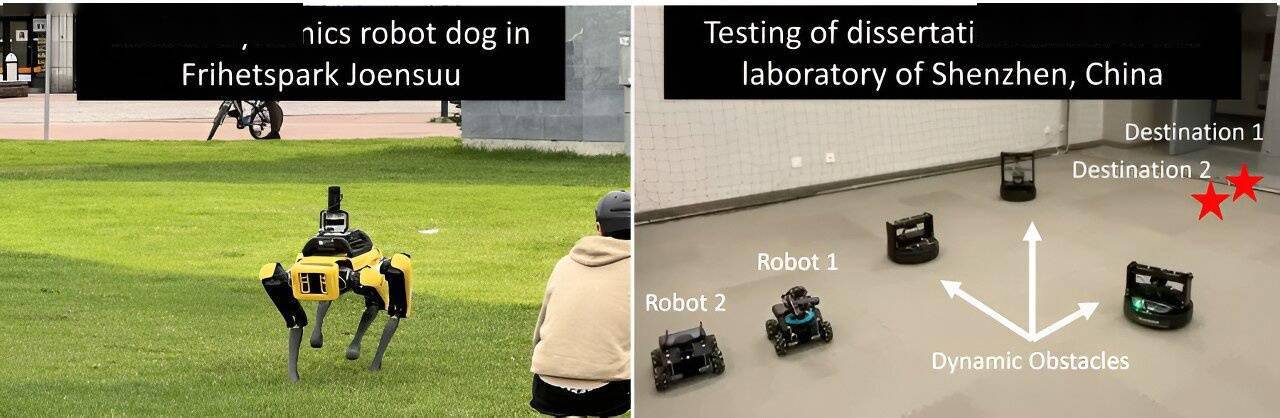
최신 논문에서 MSc의 Chengmin Zhou는 로봇이 군중 속에서 이동할 수 있도록 안내하는 강화 학습 알고리즘(RL)을 제안합니다
로봇이 역사적 경험을 통해 학습할 수 있도록 하는 모델이 없는 강화 학습 알고리즘입니다. 훈련이나 학습 후에 로봇은 어려운 상황에서도 탐색할 수 있습니다.
IT 홈 참고: 이 방법에는 느린 학습 효과, 센서 정보를 효율적으로 분석할 수 없음, 결과적으로 복잡한 군중 장면을 효과적으로 처리할 수 없음 등 많은 문제가 있습니다.
위 내용은 로봇이 군중을 탐색하는 새로운 알고리즘이 나옵니다의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!


















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



