
Nat.Commun.: 로봇은 올챙이의 진화를 모방하고 새로운 기술을 습득합니다!
올챙이는 물에서만 헤엄칠 수 있지만, 개구리로 변하면 육지와 물에서 수륙 양용 능력을 가질 수 있습니다. 동일한 로봇은 체형의 한계로 인해 많은 스포츠를 잘할 수 없습니다. 하지만 로봇은 변신을 통해 새로운 기술을 얻을 수 있습니다.
기존 변신 로봇의 단점
그러나 기존의 형태 변경 로봇은 항상 대형 모터 및 전송 메커니즘과 같은 부피가 큰 외부 장비에 의존해 왔기 때문에 유연성과 다양성이 제한되었습니다. 이는 근육으로 움직이며 풍부한 감지 및 제어 능력을 갖춘 자연의 동물과는 분명히 다릅니다.
최근 예일대학교와 콜로라도 주립대학교 연구진은 세계적으로 유명한 저널인 '네이처 커뮤니케이션즈(Nature Communications)'에 전통적인 로봇의 변형 방식을 완전히 바꾼 혁신적인 연구 결과를 발표했습니다. 연구원들은 작동, 감지 및 잠금 기능을 로봇의 내부 구조에 직접 내장하여 번거로운 외부 하드웨어가 필요하지 않도록 하는 데 성공했습니다.
원칙
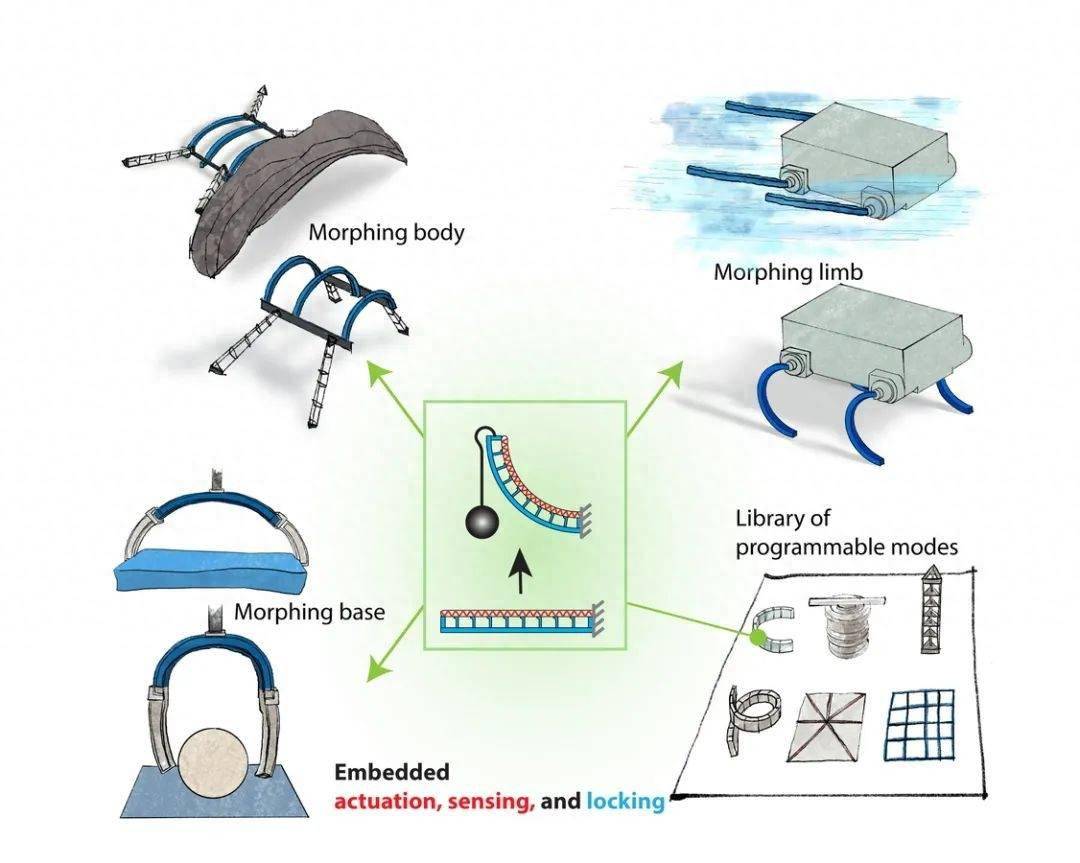
이 혁신적인 기술의 핵심은 경량의 인공근육과 형상기억폴리머(SMP)를 결합한 것입니다. 인공 근육은 전류에 반응하여 수축할 수 있으며, SMP는 강성 상태와 부드러운 상태 사이를 전환하여 로봇의 모양을 고정할 수 있습니다. 이 접근 방식의 독특한 점은 복잡한 기계 구조와 변속기가 필요 없이 이러한 모든 기능을 로봇 본체에 완전히 내장한다는 것입니다.
인간과 마찬가지로 이 로봇도 자신의 모양 변화를 감지하고 정밀한 제어가 가능합니다.

앱
이 임베디드 변형 기술은 광범위한 실제 응용 가능성을 가지고 있으며 완전히 혁명적입니다. 연구팀은 다양한 로봇 시스템에서 이 기술의 다양성을 입증했습니다. 예를 들어, 물체의 크기에 따라 골격의 크기를 조정하는 그리퍼를 시연했습니다. 이런 식으로 큰 조는 작은 모양을 고정할 수 있고, 작은 조는 큰 모양을 고정할 수 있습니다
자체 감지 형태 변경 그리퍼는 다양한 집기 작업에 적응할 수 있으며, 4족 로봇은 지면 조건에 따라 몸 모양을 조정할 수 있습니다. 예를 들어, 작은 틈새로 기어갔다가 일어나서 더 빨리 걸을 수 있도록 체형을 바꿀 수 있습니다. 작은 다리를 건너야 할 때는 다리를 잡고 위로 올라가면 됩니다

로봇은 다양한 환경과 작업에 적응하기 위해 필요할 때 팔다리의 모양을 변경할 수 있습니다. 예를 들어, 로봇의 다리가 직선에서 곡선으로 바뀌면 해안으로 올라가서 이동할 수 있습니다.
발이 구부러진 상태에서 곧은 상태로 바뀌면 다시 물로 돌아가 수영할 수 있습니다

콘텐츠를 다음과 같이 다시 작성: 무한한 잠재력
이 연구에서 가장 눈에 띄는 결과 중 하나는 비틀림, 3차원 굽힘 및 표면 변형을 포함하여 프로그래밍 가능한 형상 변경을 달성할 수 있는 내장 변형 모듈 라이브러리 세트를 구축한 것입니다. 이 라이브러리는 로봇이 다양한 과제에 대처할 수 있도록 하는 임베디드 방법을 보여줍니다
이 획기적인 연구의 영향은 광범위할 것입니다. 내장된 형태적 변화는 주변 환경과 상호 작용하는 로봇의 능력을 향상시킬 뿐만 아니라 수색 및 구조, 탐사, 의료 및 산업 자동화 분야의 응용 분야에 새로운 가능성을 제공합니다. 로봇은 다양한 형태와 기능을 원활하게 전환할 수 있어 로봇공학 분야에 전례 없는 다양성을 제공합니다
논문을 보려면 아래 링크를 클릭하세요:
다시 작성해야 하는 내용은 다음과 같습니다: https://www.nature.com/articles/s41467-023-41708-6
위 내용은 Nat.Commun.: 로봇은 올챙이의 진화를 모방하고 새로운 기술을 습득합니다!의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



