
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()
기계 학습 | PyTorch 간결한 튜토리얼 2부

이전 글"PyTorch Concise Tutorial Part 1"에 이어 다층 퍼셉트론, 컨볼루셔널 신경망, LSTMNet을 계속해서 배워보세요.
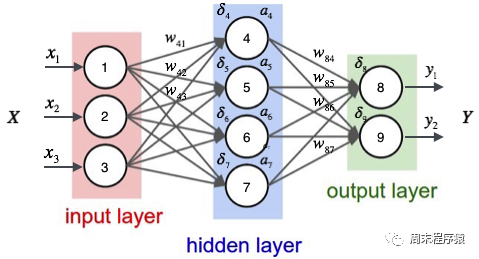
1. 다층 퍼셉트론
다층 퍼셉트론은 간단한 신경망이자 딥러닝의 중요한 기반입니다. 네트워크에 하나 이상의 숨겨진 레이어를 추가하여 선형 모델의 한계를 극복합니다. 구체적인 다이어그램은 다음과 같습니다.
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistdef build_model(input_dim, output_dim):return torch.nn.Sequential(torch.nn.Linear(input_dim, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, output_dim, bias=False),)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples, n_features = trX.size()n_classes = 10model = build_model(n_features, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.Adam(model.parameters())batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1) 위 코드는 단일 레이어 신경망의 코드와 유사합니다. 차이점은 build_model이 3개의 선형 레이어와 2개의 ReLU 활성화를 포함하는 신경망 모델을 구축한다는 것입니다. 함수:
- 모델에 첫 번째 선형 레이어를 추가합니다. 이 레이어의 입력 기능 수는 input_dim이고 출력 기능 수는 512입니다. 그런 다음 ReLU 활성화 함수와 드롭아웃 레이어를 추가하여 비선형 기능을 향상합니다.
- 두 번째 선형 레이어를 모델에 추가합니다. 이 레이어의 입력 기능 수는 512개이고, 출력 기능 수는 512개입니다. 그런 다음 ReLU 활성화 함수와 드롭아웃 레이어;
- 모델에 세 번째 선형 레이어 추가 선형 레이어, 이 레이어의 입력 기능 수는 512개, 출력 기능 수는 모델의 출력 범주 수인 output_dim입니다. (2) ReLU 활성화 함수란? ReLU(Rectified Linear Unit) 활성화 함수는 딥러닝 및 신경망에서 일반적으로 사용되는 활성화 함수입니다. ReLU 함수의 수학적 표현은 f(x) = max(0, x)입니다. 여기서 x는 입력 값입니다. ReLU 함수의 특징은 입력 값이 0보다 작거나 같으면 출력이 0이고, 입력 값이 0보다 크면 출력이 입력 값과 같다는 것입니다. 간단히 말해서 ReLU 함수는 음수 부분을 0으로 억제하고 양수 부분은 변경하지 않고 그대로 둡니다. 신경망에서 ReLU 활성화 함수의 역할은 신경망이 복잡한 비선형 관계를 맞출 수 있도록 비선형 요소를 도입하는 것입니다. 동시에 ReLU 함수는 다른 활성화 함수(예: Sigmoid 또는 Tanh) 및 기타 장점
- (3) 드롭아웃 레이어란 무엇입니까? 드롭아웃 레이어는 신경망에서 과적합을 방지하기 위해 사용되는 기술입니다. 훈련 과정에서 드롭아웃 레이어는 일부 뉴런의 출력을 무작위로 0으로 설정합니다. 즉, 이러한 뉴런을 "폐기"하는 목적은 뉴런 간의 상호 의존성을 줄여 네트워크의 일반화 능력을 향상시키는 것입니다.
- (4)print("Epoch %d, 비용 = %f, acc = %.2f%%" % (i + 1, 비용 / num_batches, 100. * np.mean(predY == teY))) 마지막으로 , 현재 훈련 라운드, 손실 값 및 acc가 인쇄됩니다. 위 코드 출력은 다음과 같습니다.
...Epoch 91, cost = 0.011129, acc = 98.45%Epoch 92, cost = 0.007644, acc = 98.58%Epoch 93, cost = 0.011872, acc = 98.61%Epoch 94, cost = 0.010658, acc = 98.58%Epoch 95, cost = 0.007274, acc = 98.54%Epoch 96, cost = 0.008183, acc = 98.43%Epoch 97, cost = 0.009999, acc = 98.33%Epoch 98, cost = 0.011613, acc = 98.36%Epoch 99, cost = 0.007391, acc = 98.51%Epoch 100, cost = 0.011122, acc = 98.59%
최종 동일한 데이터 분류가 단일 계층 신경망보다 더 높은 정확도(98.59% > 97.68)를 갖는 것을 볼 수 있습니다. %).
2. Convolutional Neural Network
CNN(Convolutional Neural Network)은 딥러닝 알고리즘입니다. 행렬이 입력되면 CNN은 중요한 부분과 중요하지 않은 부분을 구분(가중치 할당)할 수 있습니다. 다른 분류 작업에 비해 CNN은 완전히 훈련된 한 높은 데이터 전처리가 필요하지 않으며 행렬의 특성을 학습할 수 있습니다. 다음 그림은 프로세스를 보여줍니다.
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()로그인 후 복사
(1) 위 코드는 torch.nn.Module 클래스에서 상속되고 __init__ 메서드에서 컨벌루션 신경망을 나타내는 ConvNet이라는 클래스를 정의합니다. 두 개의 하위 모듈은 fc는 각각 컨벌루션 레이어와 완전 연결 레이어를 나타내는 것으로 정의됩니다. conv 하위 모듈에서는 두 개의 컨벌루션 계층(torch.nn.Conv2d), 두 개의 최대 풀링 계층(torch.nn.MaxPool2d), 두 개의 ReLU 활성화 함수(torch.nn.ReLU) 및 드롭아웃 계층(torch.nn)을 정의합니다. 탈락). fc 하위 모듈에는 두 개의 선형 레이어(torch.nn.Linear), ReLU 활성화 함수 및 드롭아웃 레이어가 정의됩니다.
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main() 풀링 레이어는 CNN에서 중요한 역할을 하며 주요 목적은 다음과 같습니다. : 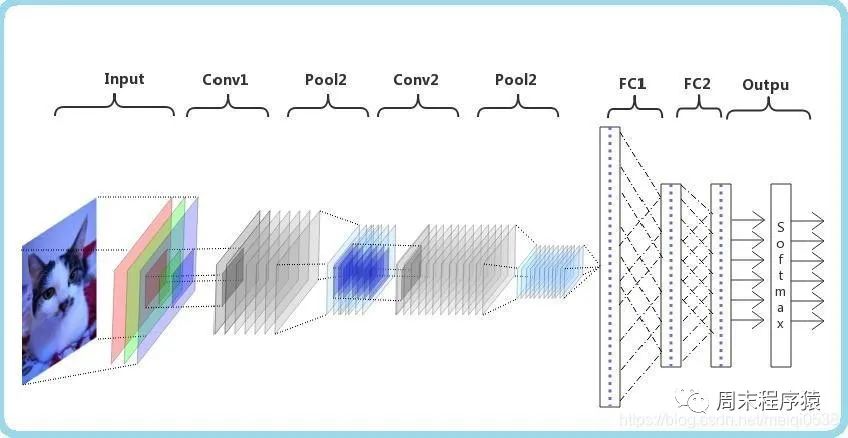
- 降低维度:池化层通过对输入特征图(Feature maps)进行局部区域的下采样操作,降低了特征图的尺寸。这样可以减少后续层中的参数数量,降低计算复杂度,加速训练过程;
- 平移不变性:池化层可以提高网络对输入图像的平移不变性。当图像中的某个特征发生小幅度平移时,池化层的输出仍然具有相似的特征表示。这有助于提高模型的泛化能力,使其能够在不同位置和尺度下识别相同的特征;
- 防止过拟合:通过减少特征图的尺寸,池化层可以降低模型的参数数量,从而降低过拟合的风险;
- 增强特征表达:池化操作可以聚合局部区域内的特征,从而强化和突出更重要的特征信息。常见的池化操作有最大池化(Max Pooling)和平均池化(Average Pooling),分别表示在局部区域内取最大值或平均值作为输出;
(3)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.047302, acc = 99.22%Epoch 92, cost = 0.049026, acc = 99.22%Epoch 93, cost = 0.048953, acc = 99.13%Epoch 94, cost = 0.045235, acc = 99.12%Epoch 95, cost = 0.045136, acc = 99.14%Epoch 96, cost = 0.048240, acc = 99.02%Epoch 97, cost = 0.049063, acc = 99.21%Epoch 98, cost = 0.045373, acc = 99.23%Epoch 99, cost = 0.046127, acc = 99.12%Epoch 100, cost = 0.046864, acc = 99.10%
可以看出最后相同的数据分类,准确率比多层感知机要高(99.10% > 98.59%)。
3、LSTMNet
LSTMNet是使用长短时记忆网络(Long Short-Term Memory, LSTM)构建的神经网络,核心思想是引入了一个名为"记忆单元"的结构,该结构可以在一定程度上保留长期依赖信息,LSTM中的每个单元包括一个输入门(input gate)、一个遗忘门(forget gate)和一个输出门(output gate),这些门的作用是控制信息在记忆单元中的流动,以便网络可以学习何时存储、更新或输出有用的信息。
import numpy as npimport torchfrom torch import optim, nnfrom data_util import load_mnistclass LSTMNet(torch.nn.Module):def __init__(self, input_dim, hidden_dim, output_dim):super(LSTMNet, self).__init__()self.hidden_dim = hidden_dimself.lstm = nn.LSTM(input_dim, hidden_dim)self.linear = nn.Linear(hidden_dim, output_dim, bias=False)def forward(self, x):batch_size = x.size()[1]h0 = torch.zeros([1, batch_size, self.hidden_dim])c0 = torch.zeros([1, batch_size, self.hidden_dim])fx, _ = self.lstm.forward(x, (h0, c0))return self.linear.forward(fx[-1])def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)train_size = len(trY)n_classes = 10seq_length = 28input_dim = 28hidden_dim = 128batch_size = 100epochs = 100trX = trX.reshape(-1, seq_length, input_dim)teX = teX.reshape(-1, seq_length, input_dim)trX = np.swapaxes(trX, 0, 1)teX = np.swapaxes(teX, 0, 1)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)model = LSTMNet(input_dim, hidden_dim, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)for i in range(epochs):cost = 0.num_batches = train_size // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[:, start:end, :], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%" %(i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上这段代码通用的部分就不解释了,具体说LSTMNet类:
- self.lstm = nn.LSTM(input_dim, hidden_dim)创建一个LSTM层,输入维度为input_dim,隐藏层维度为hidden_dim;
- self.linear = nn.Linear(hidden_dim, output_dim, bias=False)创建一个线性层(全连接层),输入维度为hidden_dim,输出维度为output_dim,并设置不使用偏置项(bias);
- h0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的隐藏状态h0,全零张量,形状为[1, batch_size, hidden_dim];
- c0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的细胞状态c0,全零张量,形状为[1, batch_size, hidden_dim];
- fx, _ = self.lstm.forward(x, (h0, c0))将输入数据x以及初始隐藏状态h0和细胞状态c0传入LSTM层,得到LSTM层的输出fx;
- return self.linear.forward(fx[-1])将LSTM层的输出传入线性层进行计算,得到最终输出。这里fx[-1]表示取LSTM层输出的最后一个时间步的数据;
(2)print("第%d轮,损失值=%f,准确率=%.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))。打印出当前训练轮次的信息,其中包括损失值和准确率,以上代码的输出结果如下:
Epoch 91, cost = 0.000468, acc = 98.57%Epoch 92, cost = 0.000452, acc = 98.57%Epoch 93, cost = 0.000437, acc = 98.58%Epoch 94, cost = 0.000422, acc = 98.57%Epoch 95, cost = 0.000409, acc = 98.58%Epoch 96, cost = 0.000396, acc = 98.58%Epoch 97, cost = 0.000384, acc = 98.57%Epoch 98, cost = 0.000372, acc = 98.56%Epoch 99, cost = 0.000360, acc = 98.55%Epoch 100, cost = 0.000349, acc = 98.55%
4、辅助代码
两篇文章的from data_util import load_mnist的data_util.py代码如下:
import gzip
import os
import urllib.request as request
from os import path
import numpy as np
DATASET_DIR = 'datasets/'
MNIST_FILES = ["train-images-idx3-ubyte.gz", "train-labels-idx1-ubyte.gz", "t10k-images-idx3-ubyte.gz", "t10k-labels-idx1-ubyte.gz"]
def download_file(url, local_path):
dir_path = path.dirname(local_path)
if not path.exists(dir_path):
print("创建目录'%s' ..." % dir_path)
os.makedirs(dir_path)
print("从'%s'下载中 ..." % url)
request.urlretrieve(url, local_path)
def download_mnist(local_path):
url_root = "http://yann.lecun.com/exdb/mnist/"
for f_name in MNIST_FILES:
f_path = os.path.join(local_path, f_name)
if not path.exists(f_path):
download_file(url_root + f_name, f_path)
def one_hot(x, n):
if type(x) == list:
x = np.array(x)
x = x.flatten()
o_h = np.zeros((len(x), n))
o_h[np.arange(len(x)), x] = 1
return o_h
def load_mnist(ntrain=60000, ntest=10000, notallow=True):
data_dir = os.path.join(DATASET_DIR, 'mnist/')
if not path.exists(data_dir):
download_mnist(data_dir)
else:
# 检查所有文件
checks = [path.exists(os.path.join(data_dir, f)) for f in MNIST_FILES]
if not np.all(checks):
download_mnist(data_dir)
with gzip.open(os.path.join(data_dir, 'train-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trX = loaded[16:].reshape((60000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 'train-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trY = loaded[8:].reshape((60000))
with gzip.open(os.path.join(data_dir, 't10k-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teX = loaded[16:].reshape((10000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 't10k-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teY = loaded[8:].reshape((10000))
trX /= 255.
teX /= 255.
trX = trX[:ntrain]
trY = trY[:ntrain]
teX = teX[:ntest]
teY = teY[:ntest]
if onehot:
trY = one_hot(trY, 10)
teY = one_hot(teY, 10)
else:
trY = np.asarray(trY)
teY = np.asarray(teY)
return trX, teX, trY, teY위 내용은 기계 학습 | PyTorch 간결한 튜토리얼 2부의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7480
7480
 15
1377
52
77
11
51
19
19
33
15
1377
52
77
11
51
19
19
33

 15가지 추천 오픈 소스 무료 이미지 주석 도구
Mar 28, 2024 pm 01:21 PM
15가지 추천 오픈 소스 무료 이미지 주석 도구
Mar 28, 2024 pm 01:21 PM
이미지 주석은 이미지 콘텐츠에 더 깊은 의미와 설명을 제공하기 위해 이미지에 레이블이나 설명 정보를 연결하는 프로세스입니다. 이 프로세스는 비전 모델을 훈련하여 이미지의 개별 요소를 보다 정확하게 식별하는 데 도움이 되는 기계 학습에 매우 중요합니다. 이미지에 주석을 추가함으로써 컴퓨터는 이미지 뒤의 의미와 맥락을 이해할 수 있으므로 이미지 내용을 이해하고 분석하는 능력이 향상됩니다. 이미지 주석은 컴퓨터 비전, 자연어 처리, 그래프 비전 모델 등 다양한 분야를 포괄하여 차량이 도로의 장애물을 식별하도록 지원하는 등 광범위한 애플리케이션을 보유하고 있습니다. 의료영상인식을 통한 질병진단. 이 기사에서는 주로 더 나은 오픈 소스 및 무료 이미지 주석 도구를 권장합니다. 1.마케센스
 이 기사에서는 SHAP: 기계 학습을 위한 모델 설명을 이해하도록 안내합니다.
Jun 01, 2024 am 10:58 AM
이 기사에서는 SHAP: 기계 학습을 위한 모델 설명을 이해하도록 안내합니다.
Jun 01, 2024 am 10:58 AM
기계 학습 및 데이터 과학 분야에서 모델 해석 가능성은 항상 연구자와 실무자의 초점이었습니다. 딥러닝, 앙상블 방법 등 복잡한 모델이 널리 적용되면서 모델의 의사결정 과정을 이해하는 것이 특히 중요해졌습니다. explainable AI|XAI는 모델의 투명성을 높여 머신러닝 모델에 대한 신뢰와 확신을 구축하는 데 도움이 됩니다. 모델 투명성을 향상시키는 것은 여러 복잡한 모델의 광범위한 사용은 물론 모델을 설명하는 데 사용되는 의사 결정 프로세스와 같은 방법을 통해 달성할 수 있습니다. 이러한 방법에는 기능 중요도 분석, 모델 예측 간격 추정, 로컬 해석 가능성 알고리즘 등이 포함됩니다. 특성 중요도 분석은 모델이 입력 특성에 미치는 영향 정도를 평가하여 모델의 의사결정 과정을 설명할 수 있습니다. 모델 예측 구간 추정
 투명한! 주요 머신러닝 모델의 원리를 심층적으로 분석!
Apr 12, 2024 pm 05:55 PM
투명한! 주요 머신러닝 모델의 원리를 심층적으로 분석!
Apr 12, 2024 pm 05:55 PM
일반인의 관점에서 보면 기계 학습 모델은 입력 데이터를 예측된 출력에 매핑하는 수학적 함수입니다. 보다 구체적으로, 기계 학습 모델은 예측 출력과 실제 레이블 사이의 오류를 최소화하기 위해 훈련 데이터로부터 학습하여 모델 매개변수를 조정하는 수학적 함수입니다. 기계 학습에는 로지스틱 회귀 모델, 의사결정 트리 모델, 지원 벡터 머신 모델 등 다양한 모델이 있습니다. 각 모델에는 적용 가능한 데이터 유형과 문제 유형이 있습니다. 동시에, 서로 다른 모델 간에는 많은 공통점이 있거나 모델 발전을 위한 숨겨진 경로가 있습니다. 연결주의 퍼셉트론을 예로 들면, 퍼셉트론의 은닉층 수를 늘려 심층 신경망으로 변환할 수 있습니다. 퍼셉트론에 커널 함수를 추가하면 SVM으로 변환할 수 있다. 이 하나
 학습 곡선을 통해 과적합과 과소적합 식별
Apr 29, 2024 pm 06:50 PM
학습 곡선을 통해 과적합과 과소적합 식별
Apr 29, 2024 pm 06:50 PM
이 글에서는 학습 곡선을 통해 머신러닝 모델에서 과적합과 과소적합을 효과적으로 식별하는 방법을 소개합니다. 과소적합 및 과적합 1. 과적합 모델이 데이터에 대해 과도하게 훈련되어 데이터에서 노이즈를 학습하는 경우 모델이 과적합이라고 합니다. 과적합된 모델은 모든 예를 너무 완벽하게 학습하므로 보이지 않거나 새로운 예를 잘못 분류합니다. 과대적합 모델의 경우 완벽/거의 완벽에 가까운 훈련 세트 점수와 형편없는 검증 세트/테스트 점수를 얻게 됩니다. 약간 수정됨: "과적합의 원인: 복잡한 모델을 사용하여 간단한 문제를 해결하고 데이터에서 노이즈를 추출합니다. 훈련 세트로 사용되는 작은 데이터 세트는 모든 데이터를 올바르게 표현하지 못할 수 있기 때문입니다."
 우주탐사 및 인간정주공학 분야 인공지능의 진화
Apr 29, 2024 pm 03:25 PM
우주탐사 및 인간정주공학 분야 인공지능의 진화
Apr 29, 2024 pm 03:25 PM
1950년대에는 인공지능(AI)이 탄생했다. 그때 연구자들은 기계가 사고와 같은 인간과 유사한 작업을 수행할 수 있다는 것을 발견했습니다. 이후 1960년대에 미국 국방부는 인공 지능에 자금을 지원하고 추가 개발을 위해 실험실을 설립했습니다. 연구자들은 우주 탐사, 극한 환경에서의 생존 등 다양한 분야에서 인공지능의 응용 분야를 찾고 있습니다. 우주탐험은 지구를 넘어 우주 전체를 포괄하는 우주에 대한 연구이다. 우주는 지구와 조건이 다르기 때문에 극한 환경으로 분류됩니다. 우주에서 생존하려면 많은 요소를 고려해야 하며 예방 조치를 취해야 합니다. 과학자와 연구자들은 우주를 탐험하고 모든 것의 현재 상태를 이해하는 것이 우주가 어떻게 작동하는지 이해하고 잠재적인 환경 위기에 대비하는 데 도움이 될 수 있다고 믿습니다.
 C++에서 기계 학습 알고리즘 구현: 일반적인 과제 및 솔루션
Jun 03, 2024 pm 01:25 PM
C++에서 기계 학습 알고리즘 구현: 일반적인 과제 및 솔루션
Jun 03, 2024 pm 01:25 PM
C++의 기계 학습 알고리즘이 직면하는 일반적인 과제에는 메모리 관리, 멀티스레딩, 성능 최적화 및 유지 관리 가능성이 포함됩니다. 솔루션에는 스마트 포인터, 최신 스레딩 라이브러리, SIMD 지침 및 타사 라이브러리 사용은 물론 코딩 스타일 지침 준수 및 자동화 도구 사용이 포함됩니다. 실제 사례에서는 Eigen 라이브러리를 사용하여 선형 회귀 알고리즘을 구현하고 메모리를 효과적으로 관리하며 고성능 행렬 연산을 사용하는 방법을 보여줍니다.
 설명 가능한 AI: 복잡한 AI/ML 모델 설명
Jun 03, 2024 pm 10:08 PM
설명 가능한 AI: 복잡한 AI/ML 모델 설명
Jun 03, 2024 pm 10:08 PM
번역기 | 검토자: Li Rui | Chonglou 인공 지능(AI) 및 기계 학습(ML) 모델은 오늘날 점점 더 복잡해지고 있으며 이러한 모델에서 생성되는 출력은 이해관계자에게 설명할 수 없는 블랙박스입니다. XAI(Explainable AI)는 이해관계자가 이러한 모델의 작동 방식을 이해할 수 있도록 하고, 이러한 모델이 실제로 의사 결정을 내리는 방식을 이해하도록 하며, AI 시스템의 투명성, 이 문제를 해결하기 위한 신뢰 및 책임을 보장함으로써 이 문제를 해결하는 것을 목표로 합니다. 이 기사에서는 기본 원리를 설명하기 위해 다양한 설명 가능한 인공 지능(XAI) 기술을 살펴봅니다. 설명 가능한 AI가 중요한 몇 가지 이유 신뢰와 투명성: AI 시스템이 널리 수용되고 신뢰되려면 사용자가 의사 결정 방법을 이해해야 합니다.
 당신이 모르는 머신러닝의 5가지 학교
Jun 05, 2024 pm 08:51 PM
당신이 모르는 머신러닝의 5가지 학교
Jun 05, 2024 pm 08:51 PM
머신 러닝은 명시적으로 프로그래밍하지 않고도 컴퓨터가 데이터로부터 학습하고 능력을 향상시킬 수 있는 능력을 제공하는 인공 지능의 중요한 분야입니다. 머신러닝은 이미지 인식, 자연어 처리, 추천 시스템, 사기 탐지 등 다양한 분야에서 폭넓게 활용되며 우리의 삶의 방식을 변화시키고 있습니다. 기계 학습 분야에는 다양한 방법과 이론이 있으며, 그 중 가장 영향력 있는 5가지 방법을 "기계 학습의 5개 학교"라고 합니다. 5개 주요 학파는 상징학파, 연결주의 학파, 진화학파, 베이지안 학파, 유추학파이다. 1. 상징주의라고도 알려진 상징주의는 논리적 추론과 지식 표현을 위해 상징을 사용하는 것을 강조합니다. 이 사고 학교는 학습이 기존을 통한 역연역 과정이라고 믿습니다.
