

북경대학교의 체화된 지능의 새로운 성과: 교육이 필요하지 않으며 지시에 따라 유연하게 이동할 수 있습니다.

Peking University Dong Hao 팀내비게이션 내장최신 결과는 다음과 같습니다.
추가 매핑 및 교육이 필요하지 않습니다. 다음과 같은 내비게이션 지침을 말하기만 하면 됩니다.
앞으로 방을 가로질러 걷고 팬티를 통과한 다음 부엌을 통과합니다. . 주방 끝에 서서
로봇을 유연하게 조종할 수 있어요.

여기서 로봇은 대형 모델로 구성된 "전문가 팀"과 적극적으로 소통하여 명령 분석, 시각적 인식, 완료 추정 및 결정과 같은 일련의 핵심 시각적 언어 탐색 작업을 완료합니다. 테스트를 하고 있습니다.

프로젝트 홈페이지와 논문은 현재 온라인에 있으며 코드는 곧 공개될 예정입니다.

로봇은 어떻게 인간의 지시에 따라 탐색하나요?
시각적 언어 탐색에는 지침 분석, 시각적 인식, 완료 추정 및 결정 테스트를 포함한 일련의 하위 작업이 포함됩니다.
이러한 주요 작업에는 다양한 분야의 지식이 필요하며 서로 연관되어 로봇의 탐색 능력을 결정합니다.
실생활 전문가의 토론 행동에서 영감을 받아 북경대학교 동하오팀이 DiscussNav 내비게이션 시스템을 제안했습니다.
저자는 먼저 LLM(Large Language Model) 및 MLM(Multimodal Large Model) 에 전문가 역할과 특정 작업을 신속하게 할당하여 도메인 지식과 역량을 활성화함으로써 다양한 전문 분야로 시각적 탐색을 구축합니다. 팀.

그런 다음 저자는 LLM 기반 탐색 로봇이 시각적 탐색 전문가와 일련의 토론을 적극적으로 시작할 수 있는 토론 질문 모음과 토론 메커니즘을 설계했습니다.
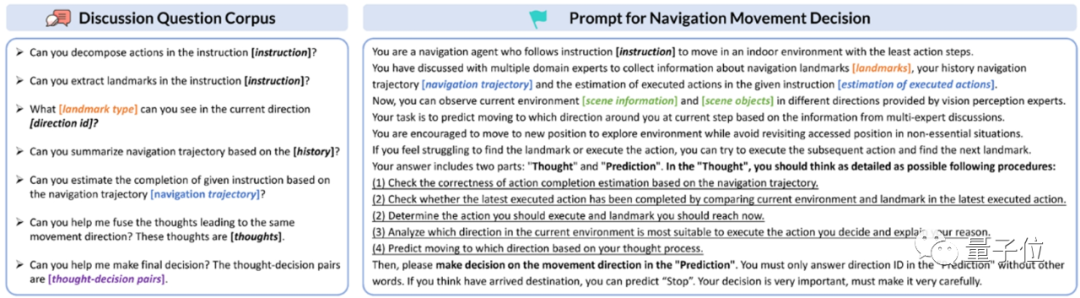
각 이동 전에 내비게이션 로봇은 전문가와 논의하여 필요한 조치와 인간 지침에 언급된 물체 기호를 이해합니다.
그런 다음 이러한 물체 기호의 유형을 기반으로 주변 환경을 인식하고 지시 완료를 추정하고 사전 움직임 결정을 내리는 경향이 있습니다.

내비게이션 로봇은 의사결정 과정에서 사고 사슬(사고 사슬)을 기반으로 N개의 독립적인 예측 결과를 동시에 생성합니다. 로봇이 의사 결정 과정을 테스트합니다. 전문가의 도움을 받아 최종 모바일 결정을 검토해 보세요.
이 과정에서 알 수 있듯이 추가적인 사전 훈련이 필요한 기존 방법에 비해 이 방법은 대규모 모델 전문가와 상호 작용하여 로봇이 인간의 지시에 따라 움직이도록 유도하고 로봇 내비게이션 훈련의 부족 문제를 직접적으로 해결합니다. 데이터.
더 나아가서, 위의 논의 프로세스를 따르는 한, 이 기능으로 인해 제로 샘플 기능도 달성할 수 있습니다. 다양한 탐색 지침을 따를 수 있습니다.
다음은 고전적인 시각적 언어 탐색 데이터 세트 Room2Room에 대한 DiscussionNav의 성능입니다.

보시다시피, 이 은 모든 제로샷 방법보다 훨씬 더 높으며, 훈련된 두 가지 방법 보다 훨씬 더 높습니다.
저자는 Turtlebot4 모바일 로봇을 대상으로 실제 실내 장면 탐색 실험을 추가로 수행했습니다.
전문 롤플레잉 및 토론에서 영감을 받은 대형 모델의 강력한 언어 및 시각적 일반화 기능을 통해 DiscussNav의 실제 성능은 이전의 최적 제로샷 방법 및 사전 훈련된 미세 조정 방법보다 훨씬 우수하여 우수한 성능을 보여줍니다. Sim-to-real 마이그레이션 기능.

실험을 통해 저자는 DiscussNav가 4가지 강력한 능력을 생성한다는 사실을 추가로 발견했습니다.
1. "흰색 테이블 위의 로봇 팔", "의자 위의 테디베어"와 같은 오픈 월드 개체를 인식합니다.
2. "주방 카운터 위의 식물" 및 "테이블 위의 상자"와 같은 세밀한 탐색 랜드마크 개체를 식별합니다.
3. 토론에서 다른 전문가가 답변한 잘못된 정보 수정 예를 들어, 로고 추출 전문가는 내비게이션 액션 시퀀스에서 내비게이션 로고를 추출하기 전에 잘못 분해된 액션 시퀀스를 확인하고 수정합니다.
4. 예를 들어 결정 테스트 전문가는 현재 환경 정보를 기반으로 DiscussNav가 예측한 여러 가지 불일치 동작 결정 중에서 가장 합리적인 결정을 최종 동작 결정으로 선택할 수 있습니다.
"시뮬레이션 및 대형 모델 사전 지식은 공짜 점심"
교신저자인 동하오는 이전 보고서에서 대규모 데이터로부터 사전 지식을 학습하기 위해 시뮬레이션 데이터와 대형 모델을 효과적으로 활용하는 방법에 대한 심층 탐구가 미래의 구현이라고 제안했습니다. 지능 연구의 발전 방향.
현재 데이터 규모와 실제 환경 탐색에 드는 높은 비용으로 인해 제한되는 구현 지능 연구는 여전히 시뮬레이션 플랫폼 실험과 시뮬레이션 데이터 교육에 중점을 둘 것입니다.
최근 대형 모델의 발전은 체화된 지능의 새로운 방향을 제시합니다. 대형 모델의 언어적 상식과 물리적 세계의 사전 지식을 적절히 탐구하고 활용하면 체화된 지능의 발전이 촉진될 것입니다.

논문 주소: https://arxiv.org/abs/2309.11382
위 내용은 북경대학교의 체화된 지능의 새로운 성과: 교육이 필요하지 않으며 지시에 따라 유연하게 이동할 수 있습니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7552
7552
 15
1382
52
83
11
59
19
22
96
15
1382
52
83
11
59
19
22
96

 ORB-SLAM3를 넘어! SL-SLAM: 저조도, 심한 흔들림, 약한 텍스처 장면을 모두 처리합니다.
May 30, 2024 am 09:35 AM
ORB-SLAM3를 넘어! SL-SLAM: 저조도, 심한 흔들림, 약한 텍스처 장면을 모두 처리합니다.
May 30, 2024 am 09:35 AM
이전에 작성했던 오늘은 딥 러닝 기술이 복잡한 환경에서 비전 기반 SLAM(동시 위치 파악 및 매핑)의 성능을 향상할 수 있는 방법에 대해 논의합니다. 심층 특징 추출과 깊이 일치 방법을 결합하여 저조도 조건, 동적 조명, 질감이 약한 영역 및 심한 지터와 같은 까다로운 시나리오에서 적응을 향상하도록 설계된 다목적 하이브리드 시각적 SLAM 시스템을 소개합니다. 우리 시스템은 확장 단안, 스테레오, 단안 관성 및 스테레오 관성 구성을 포함한 여러 모드를 지원합니다. 또한 시각적 SLAM을 딥러닝 방법과 결합하여 다른 연구에 영감을 주는 방법도 분석합니다. 공개 데이터 세트 및 자체 샘플링 데이터에 대한 광범위한 실험을 통해 위치 정확도 및 추적 견고성 측면에서 SL-SLAM의 우수성을 입증합니다.
 2세대 아메카가 왔습니다! 그는 청중과 유창하게 소통할 수 있고, 표정이 더욱 사실적이며, 수십 개 언어를 구사할 수 있다.
Mar 04, 2024 am 09:10 AM
2세대 아메카가 왔습니다! 그는 청중과 유창하게 소통할 수 있고, 표정이 더욱 사실적이며, 수십 개 언어를 구사할 수 있다.
Mar 04, 2024 am 09:10 AM
휴머노이드 로봇 아메카가 2세대로 업그레이드 되었습니다! 최근 세계이동통신학회(MWC2024)에서 세계 최고 수준의 로봇 아메카(Ameca)가 다시 등장했다. 행사장 주변에는 아메카가 많은 관중을 끌어 모았습니다. GPT-4의 축복으로 Ameca는 다양한 문제에 실시간으로 대응할 수 있습니다. "춤을 추자." 감정이 있느냐는 질문에 아메카는 매우 생생해 보이는 일련의 표정으로 대답했습니다. 불과 며칠 전, Ameca의 뒤를 잇는 영국 로봇 회사인 EngineeredArts는 팀의 최신 개발 결과를 시연했습니다. 영상 속 로봇 아메카는 시각 능력을 갖고 있어 방 전체와 특정 사물을 보고 묘사할 수 있다. 가장 놀라운 점은 그녀도 할 수 있다는 것입니다.
 AI는 어떻게 로봇을 보다 자율적이고 적응력 있게 만들 수 있습니까?
Jun 03, 2024 pm 07:18 PM
AI는 어떻게 로봇을 보다 자율적이고 적응력 있게 만들 수 있습니까?
Jun 03, 2024 pm 07:18 PM
산업자동화 기술 분야에서 최근 무시하기 어려운 두 핫스팟이 있는데 바로 인공지능(AI)과 엔비디아다. 원본 콘텐츠의 의미를 바꾸지 말고, 콘텐츠를 미세 조정하고, 콘텐츠를 다시 작성하고, 계속하지 마세요. “그뿐만 아니라 Nvidia가 원래 그래픽 처리 장치(GPU)에만 국한되지 않기 때문에 둘은 밀접하게 관련되어 있습니다. 엔비디아는 최근 GPU를 확장해 디지털 트윈 분야까지 확장하고 있으며, 최근 떠오르는 AI 기술과도 긴밀하게 연결돼 있다”고 말했다. Schneider Electric, Teradyne Robotics, MiR 및 Universal Robots 회사도 포함됩니다. 최근 엔비디아(Nvidia)는
 2개월 만에 휴머노이드 로봇 '워커S' 옷 개기 가능
Apr 03, 2024 am 08:01 AM
2개월 만에 휴머노이드 로봇 '워커S' 옷 개기 가능
Apr 03, 2024 am 08:01 AM
기계력 보고서 편집자: 우신(Wu Xin) 국내판 휴머노이드 로봇+대형 모델팀이 옷 접기 등 복잡하고 유연한 재료의 작업 작업을 처음으로 완료했습니다. OpenAI 멀티모달 대형 모델을 접목한 Figure01이 공개되면서 국내 동종업체들의 관련 진전이 주목받고 있다. 바로 어제, 중국의 "1위 휴머노이드 로봇 주식"인 UBTECH는 Baidu Wenxin의 대형 모델과 긴밀하게 통합되어 몇 가지 흥미로운 새로운 기능을 보여주는 휴머노이드 로봇 WalkerS의 첫 번째 데모를 출시했습니다. 이제 Baidu Wenxin의 대형 모델 역량을 활용한 WalkerS의 모습은 이렇습니다. Figure01과 마찬가지로 WalkerS는 움직이지 않고 책상 뒤에 서서 일련의 작업을 완료합니다. 인간의 명령을 따르고 옷을 접을 수 있습니다.
 다섯 개의 유연한 손가락과 초인적인 속도를 갖춘 인간 작업을 자율적으로 완료하는 최초의 로봇 등장, 가상 공간 훈련을 지원하는 대형 모델
Mar 11, 2024 pm 12:10 PM
다섯 개의 유연한 손가락과 초인적인 속도를 갖춘 인간 작업을 자율적으로 완료하는 최초의 로봇 등장, 가상 공간 훈련을 지원하는 대형 모델
Mar 11, 2024 pm 12:10 PM
이번 주, 오픈AI(OpenAI), 마이크로소프트(Microsoft), 베조스(Bezos), 엔비디아(Nvidia)가 투자한 로봇 회사인 FigureAI는 약 7억 달러의 자금 조달을 받았으며 내년 내에 독립적으로 걸을 수 있는 휴머노이드 로봇을 개발할 계획이라고 발표했습니다. 그리고 Tesla의 Optimus Prime은 계속해서 좋은 소식을 받았습니다. 올해가 휴머노이드 로봇이 폭발하는 해가 될 것이라는 데는 누구도 의심하지 않는다. 캐나다에 본사를 둔 로봇 회사인 SanctuaryAI는 최근 새로운 휴머노이드 로봇인 Phoenix를 출시했습니다. 관계자들은 이 로봇이 인간과 같은 속도로 자율적으로 많은 작업을 완료할 수 있다고 주장한다. 인간의 속도로 자동으로 작업을 완료할 수 있는 세계 최초의 로봇인 Pheonix는 각 물체를 부드럽게 잡고 움직이며 우아하게 왼쪽과 오른쪽에 배치할 수 있습니다. 자동으로 물체를 식별할 수 있습니다.
 미래를 만들어가는 10대의 휴머노이드 로봇
Mar 22, 2024 pm 08:51 PM
미래를 만들어가는 10대의 휴머노이드 로봇
Mar 22, 2024 pm 08:51 PM
다음 10가지 휴머노이드 로봇이 우리의 미래를 형성하고 있습니다. 1. ASIMO: Honda가 개발한 ASIMO는 가장 잘 알려진 휴머노이드 로봇 중 하나입니다. 높이 4피트, 무게 119파운드의 ASIMO는 복잡한 환경을 탐색하고 인간과 상호 작용할 수 있는 고급 센서와 인공 지능 기능을 갖추고 있습니다. ASIMO의 다재다능함은 장애인 지원부터 이벤트 프레젠테이션 제공까지 다양한 작업에 적합합니다. 2. 페퍼(Pepper): 소프트뱅크 로보틱스가 만든 페퍼는 인간의 사회적 동반자가 되는 것을 목표로 한다. 표현력이 풍부한 얼굴과 감정을 인식하는 능력을 갖춘 Pepper는 대화에 참여하고, 소매업 환경을 돕고, 교육 지원도 제공할 수 있습니다. 피망
 인간형 로봇은 마술을 할 수 있습니다. 봄 축제 갈라 프로그램 팀에서 자세히 알아보세요.
Feb 04, 2024 am 09:03 AM
인간형 로봇은 마술을 할 수 있습니다. 봄 축제 갈라 프로그램 팀에서 자세히 알아보세요.
Feb 04, 2024 am 09:03 AM
눈 깜짝할 사이에 로봇이 마법을 배웠다고? 먼저 테이블 위의 물숟가락을 집어서 관객들에게 아무것도 없다는 것을 증명하는 모습이 보였고... 그리고 달걀 같은 물체를 손에 쥐고 다시 물숟가락을 테이블 위에 올려 놓았습니다. 그리고 "주문을 걸기" 시작했습니다... ...다시 물숟가락을 집었을 때 기적이 일어났습니다. 원래 넣었던 알은 사라지고, 튀어나온 것은 농구공으로 변해버렸는데... 연속적인 동작을 다시 살펴보자: △ 이 애니메이션은 2배속으로 일련의 동작을 보여주며, 보기만 해도 부드럽게 흘러간다. 0.5배속으로 반복해서 영상을 보면, 마침내 단서를 발견했습니다. 내 손의 속도가 더 빨랐다면 적에게 숨길 수도 있었을 것입니다. 일부 네티즌들은 로봇의 마법 실력이 자신보다 훨씬 높다고 한탄했습니다. 이 마법을 우리를 위해 수행한 사람은 매그였습니다.
 구름고래 Xiaoyao 001 청소 및 걸레질 로봇에는 '뇌'가 있습니다! 경험 |
Apr 26, 2024 pm 04:22 PM
구름고래 Xiaoyao 001 청소 및 걸레질 로봇에는 '뇌'가 있습니다! 경험 |
Apr 26, 2024 pm 04:22 PM
쓸고 닦는 로봇은 최근 소비자들 사이에서 가장 인기 있는 스마트 가전제품 중 하나입니다. 그것이 가져오는 조작의 편리함, 심지어 조작이 필요하지 않은 것만으로도 게으른 사람들이 손을 자유롭게 할 수 있게 되어 소비자는 일상적인 집안일에서 "해방"되고 위장된 형태로 삶의 질이 향상됩니다. 이러한 열풍에 힘입어 시중에 나와 있는 거의 모든 가전제품 브랜드가 자체적으로 청소, 물걸레 로봇을 제작하고 있어 전체 청소, 물걸레 로봇 시장이 매우 활발해지고 있습니다. 그러나 시장의 급속한 확장은 필연적으로 숨겨진 위험을 가져올 것입니다. 많은 제조업체가 더 많은 시장 점유율을 빠르게 점유하기 위해 바다의 전술을 사용할 것이며 결과적으로 업그레이드 포인트 없이 많은 신제품이 나올 것이라고도 합니다. '마트료시카' 모델이라고 해도 과언이 아닙니다. 그러나 모든 청소 및 걸레질 로봇이 그런 것은 아닙니다.
