

대규모 모델은 간단한 대화만으로 이미 이미지에 주석을 달 수 있습니다! Tsinghua & NUS의 연구 결과

다중 모드 대형 모델에 감지 및 분할 모듈이 통합되면 이미지 컷아웃이 더 쉬워집니다!
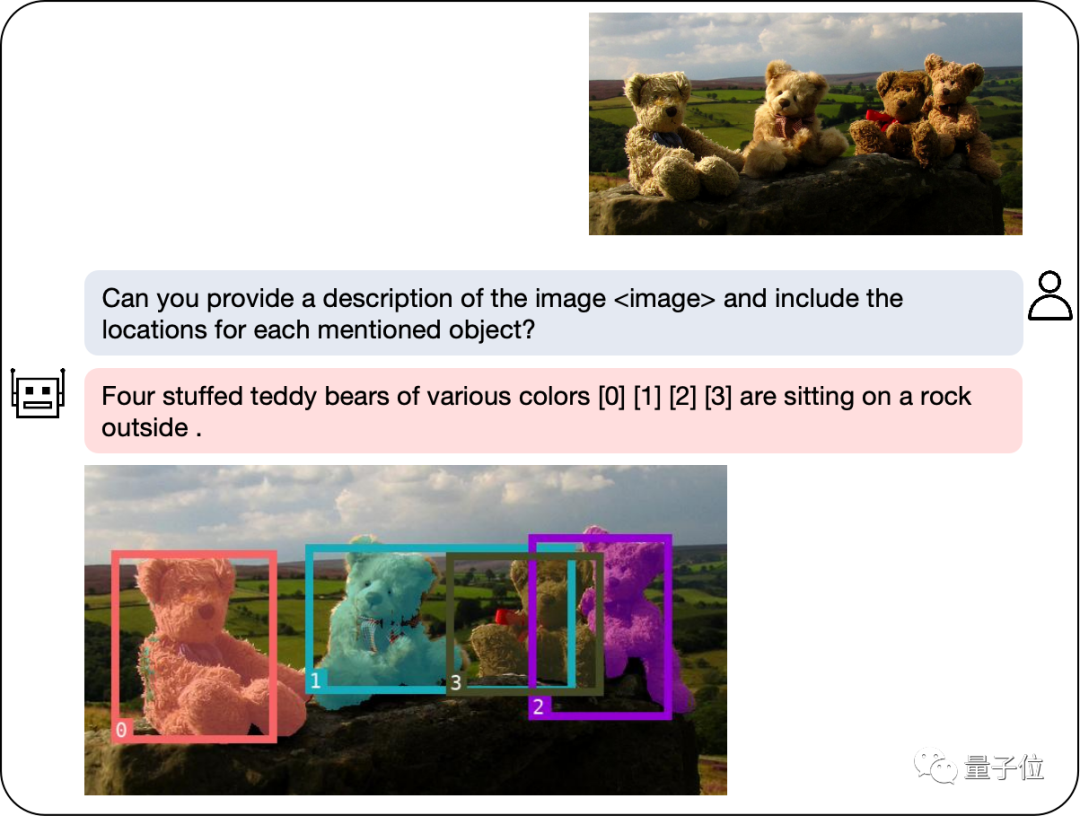
저희 모델은 자연어 설명을 통해 찾고 있는 개체에 빠르게 라벨을 지정하고 텍스트 설명을 제공하여 작업을 쉽게 완료할 수 있도록 도와줍니다.
싱가포르 국립대학교 NExT++ 연구소와 칭화대학교 Liu Zhiyuan 팀이 개발한 새로운 다중 모드 대형 모델은 우리에게 강력한 지원을 제공합니다. 이 모델은 퍼즐 해결 과정에서 플레이어에게 포괄적인 도움과 안내를 제공하기 위해 세심하게 제작되었습니다. 다양한 양식의 정보를 결합하여 플레이어에게 새로운 퍼즐 해결 방법과 전략을 제시합니다. 이 모델을 적용하면 플레이어에게 도움이 됩니다.
GPT-4v 출시로 다중 모드 분야에서는 LLaVA, BLIP-2 등과 같은 일련의 새로운 모델이 등장했습니다. 이러한 모델의 출현은 다중 모드 작업의 성능과 효율성을 향상시키는 데 큰 기여를 했습니다.
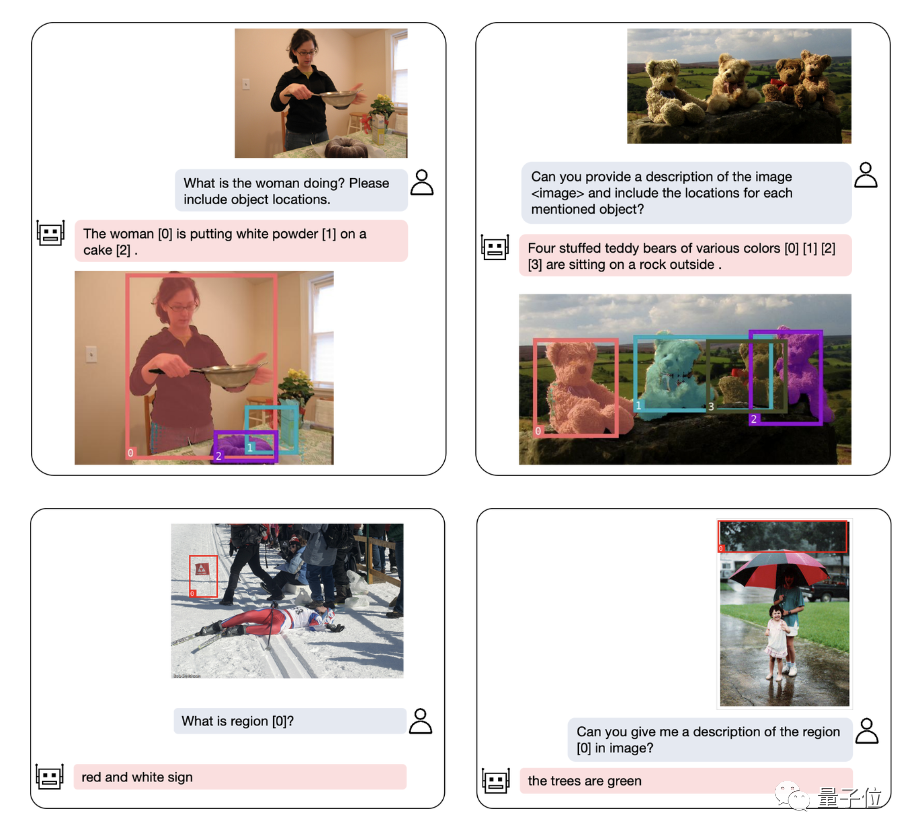
다중 대형 모델의 지역 이해 능력을 더욱 향상시키기 위해 연구팀은 NExT-Chat이라는 다중 모드 모델을 개발했습니다. 이 모델은 대화, 탐지, 분할을 동시에 수행하는 기능을 갖추고 있습니다.
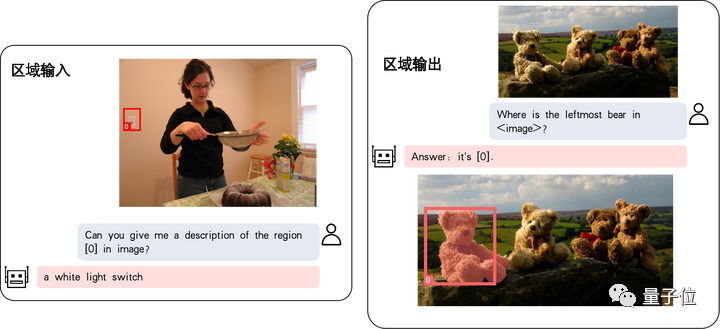
NExT-Chat의 가장 큰 특징은 다중 모드 모델에 위치 입력 및 출력을 도입하는 기능입니다. 이 기능을 통해 NExT-Chat은 상호 작용 중에 사용자 요구를 보다 정확하게 이해하고 대응할 수 있습니다. NExT-Chat은 위치 입력을 통해 사용자의 지리적 위치를 기반으로 관련 정보와 제안을 제공함으로써 사용자 경험을 향상시킬 수 있습니다. NExT-Chat은 위치 출력을 통해 특정 지리적 위치에 대한 관련 정보를 사용자에게 전달하여 사용자에게 더 나은 도움을 줄 수 있습니다.
그 중 위치 입력 기능은 지정된 영역을 기반으로 질문에 답변하는 기능을 말하고 위치 출력 기능은 위치- 특정 대화. 이 두 가지 능력은 퍼즐 게임에서 매우 중요합니다.
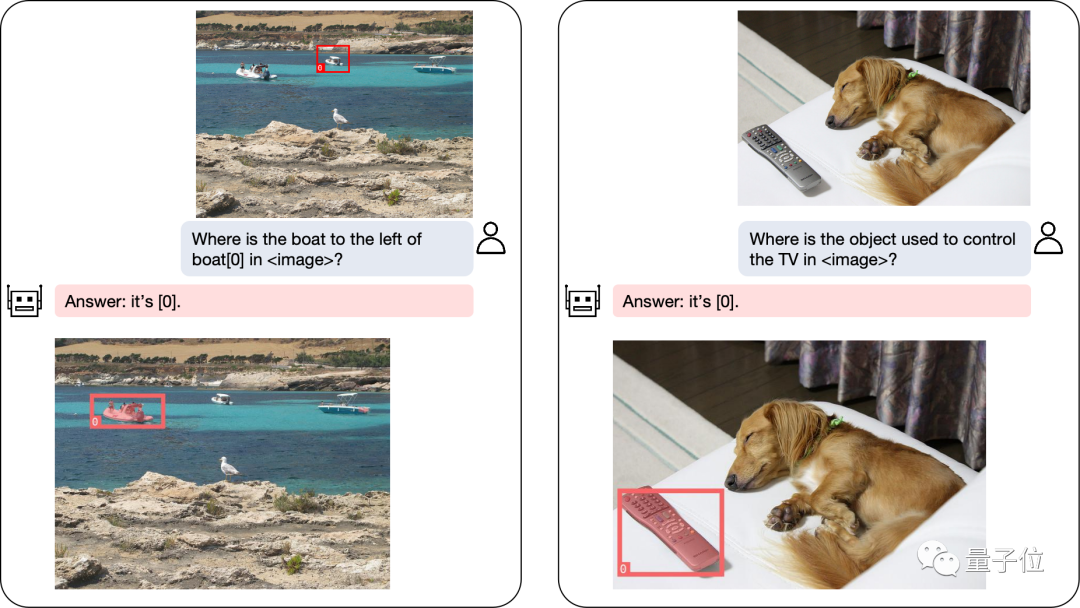
복잡한 위치 지정 문제도 쉽게 해결할 수 있습니다.
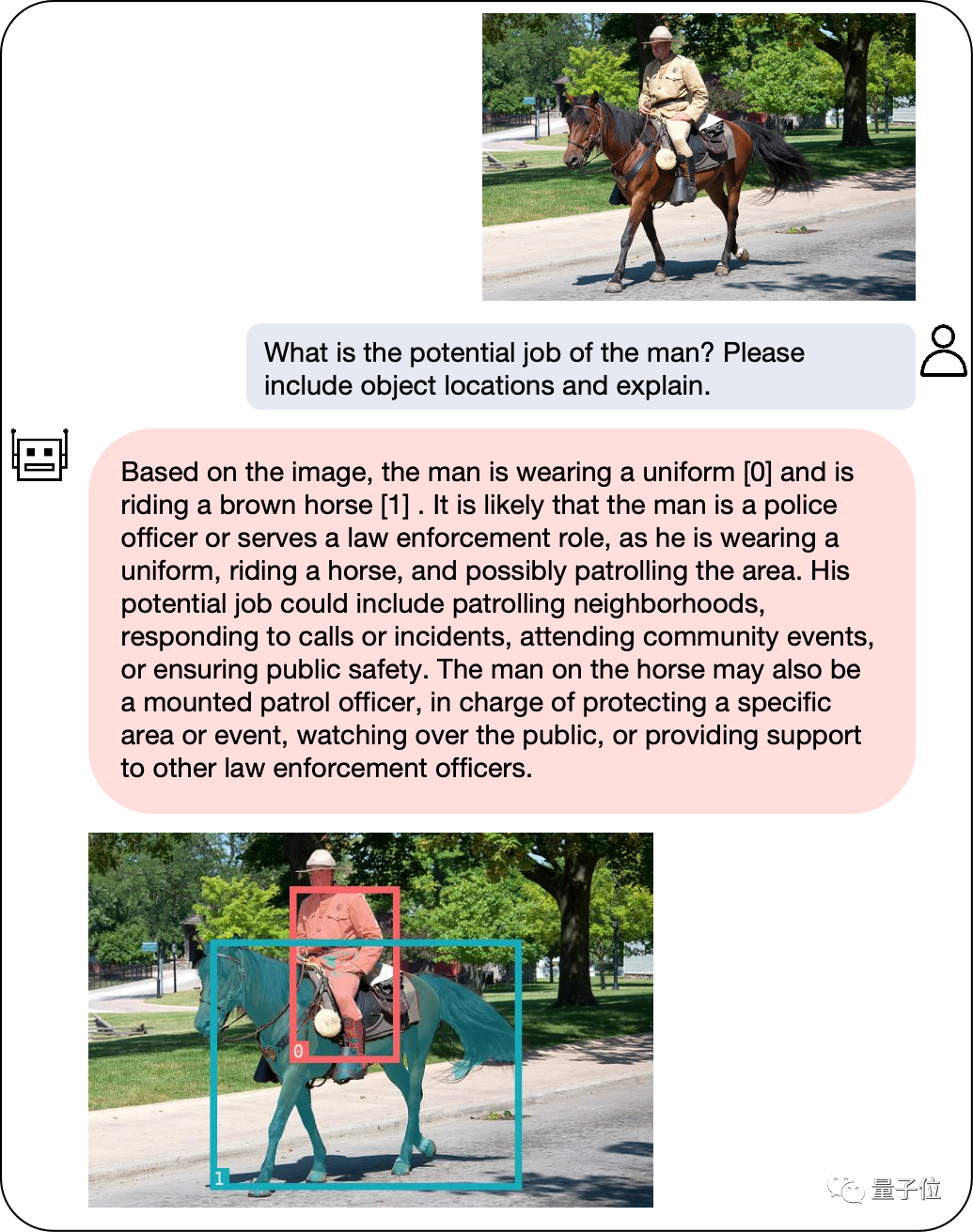
물체 위치 지정 외에도 NExT-Chat은 이미지나 이미지의 특정 부분을 설명할 수도 있습니다.
해당 내용을 분석한 후 image 이후 NExT-Chat은 획득한 정보를 사용하여 추론을 수행할 수 있습니다.
NExT-Chat의 성능을 정확하게 평가하기 위해 연구팀은 여러 작업 데이터 세트에 대한 테스트를 수행했습니다.
여러 데이터 세트에서 SOTA 달성
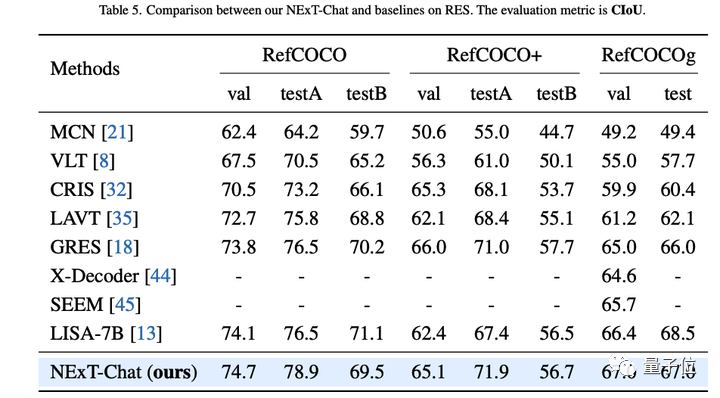
저자는 먼저 RES(Reference Expression Segmentation) 작업에 대한 NExT-Chat의 실험 결과를 보여주었습니다.
매우 적은 양의 분할 데이터만 사용하지만 NExT-Chat은 일련의 지도 모델(예: MCN, VLT 등)을 물리치고 분할 마스크를 5배 이상 사용하는 등 우수한 참조 분할 기능을 보여주었습니다. . 주석이 달린 LISA 방법.
ΔRES 작업에 대한 NExT-Chat 결과
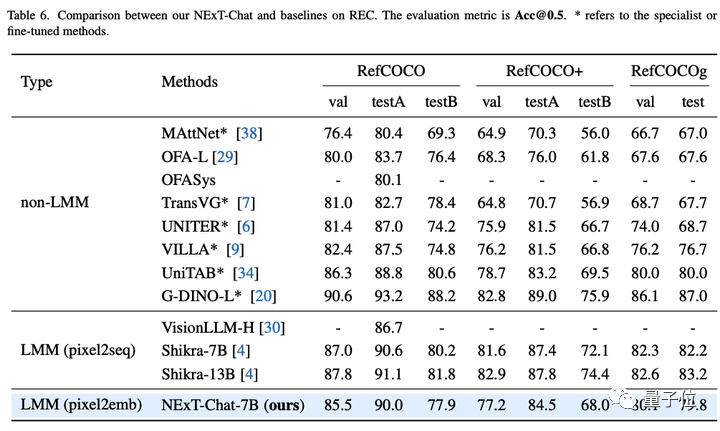
그리고 연구팀은 REC 작업에 대한 NExT-Chat의 실험 결과를 보여주었습니다.
아래 표에서 볼 수 있듯이 일련의 감독 방법(예: UNITER)에 비해 NExT-Chat은 더 나은 결과를 얻을 수 있습니다.
흥미로운 발견은 NExT-Chat이 유사한 박스 트레이닝 데이터를 사용하는 Shikra보다 약간 덜 효과적이라는 것입니다.
저자는 이는 pix2emb 방식에서 LM 손실과 검출 손실의 균형을 맞추기가 더 어렵고, Shikra가 기존 일반 텍스트 대형 모델의 사전 학습 형태에 더 가깝기 때문이라고 추측합니다.
ΔNExT-Chat의 REC 작업 결과
이미지 환상 작업에서 표 3과 같이 NExT-Chat은 Random 및 Popular 데이터 세트에서 최고의 정확도를 달성할 수 있습니다.
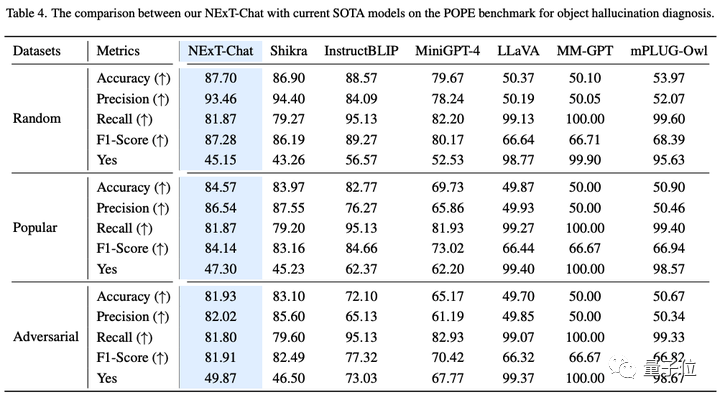
ΔPOPE 데이터 세트에 대한 NExT-Chat 결과
영역 설명 작업에서도 NExT-Chat은 최고의 CIDEr 성능을 달성했으며 이 지표의 4샷 사례에서 Kosmos-2를 능가했습니다.
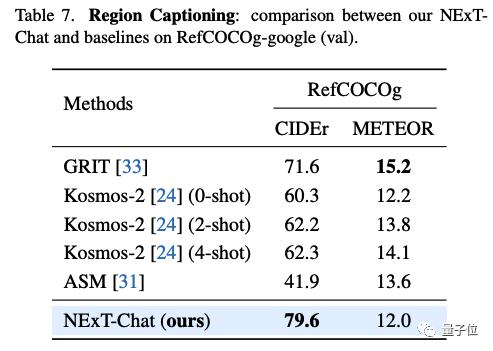
ΔRefCOCOg 데이터 세트의 NExT-Chat 결과
그렇다면 NExT-Chat에는 어떤 방법이 사용됩니까?
이미지 코딩의 새로운 방법을 제안합니다
기존 방법의 단점
기존 모델은 주로 pix2seq를 통해 LLM 관련 위치 모델링을 수행합니다.
예를 들어 Kosmos-2는 이미지를 32x32 블록으로 나누고 각 블록의 id를 사용하여 점의 좌표를 나타냅니다. Shikra는 LLM이 좌표를 이해할 수 있도록 개체 프레임의 좌표를 일반 텍스트로 변환합니다.
그러나 pix2seq 방법을 사용한 모델 출력은 주로 상자, 점과 같은 단순한 형식으로 제한되며 분할 마스크와 같은 밀도가 높은 다른 위치 표현 형식으로 일반화하기 어렵습니다.
이 문제를 해결하기 위해 이 기사에서는 새로운 임베딩 기반 위치 모델링 방법인 pix2emb를 제안합니다.
pix2emb 방법
pix2seq와 달리 pix2emb의 모든 위치 정보는 LLM 자체의 텍스트 예측 헤더에 의존하지 않고 해당 인코더 및 디코더를 통해 인코딩 및 디코딩됩니다.
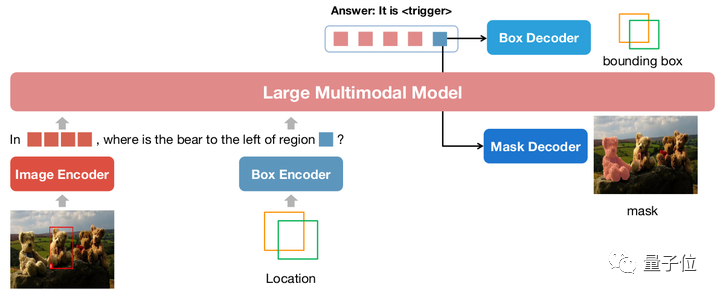
Δpix2emb 방식의 간단한 예
위 그림과 같이 위치 입력은 해당 인코더에 의해 위치 임베딩으로 인코딩되고, 출력 위치 임베딩은 Box Decoder와 Mask Decoder를 거쳐 박스와 마스크로 변환됩니다. .
이렇게 하면 두 가지 이점이 있습니다.
- 모델의 출력 형식을 분할 마스크와 같은 더 복잡한 형태로 쉽게 확장할 수 있습니다.
- 모델은 작업에서 기존의 실제 방법을 쉽게 찾을 수 있습니다. 예를 들어 이 기사의 감지 손실은 L1 손실과 GIoU 손실을 사용합니다(pix2seq는 손실을 생성하기 위해 텍스트만 사용할 수 있음). 초기화를 수행합니다.
pix2seq와 pix2emb를 결합하여 저자는 새로운 NExT-Chat 모델을 교육했습니다.
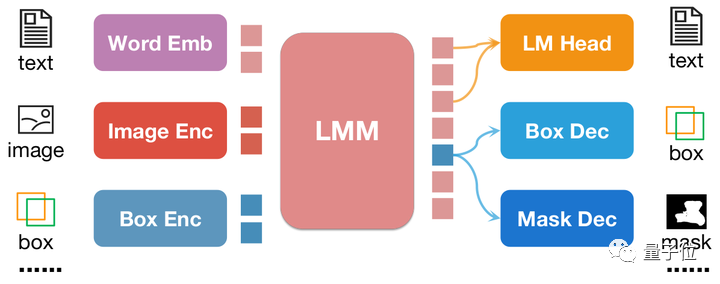
NExT-Chat 모델
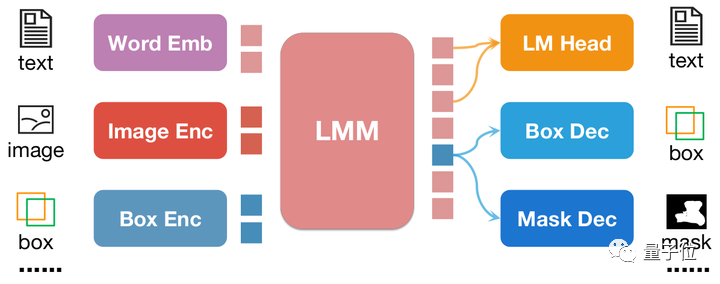
ΔNExT-Chat 모델 아키텍처
NExT-Chat은 전체적으로 LLaVA 아키텍처를 채택하고 있습니다. 즉, Image Encoder를 통해 이미지 정보를 인코딩하고 LLM에 입력하여 이해하게 되며, 이에 대해 기본적으로 Box Encoder와 Two Position Output Decoder가 대응됩니다.
언어의 LM 헤드나 위치 디코더를 언제 사용해야 할지 모르는 LLM의 문제를 해결하기 위해 NExT-Chat에서는 위치 정보를 식별할 수 있는 새로운 토큰 유형을 추가로 도입합니다.
모델이 출력되면 토큰 임베딩이 언어 디코더 대신 디코딩을 위해 해당 위치 디코더로 전송됩니다.
또한, 입력 단계와 출력 단계 사이의 위치 정보의 일관성을 유지하기 위해 NExT-Chat은 추가 정렬 제약 조건을 도입합니다.
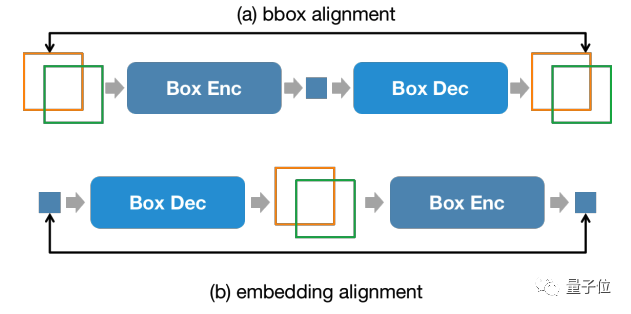
Δ위치 입력 및 출력 제약
그림과 같이 위의 박스 임베딩과 포지션 임베딩은 각각 디코더, 인코더, 디코더-인코더로 결합되며 전후에는 변경되지 않아야 합니다.
저자는 이 방법이 위치 입력 기능의 융합을 크게 촉진할 수 있다는 것을 발견했습니다.
NExT-Chat의 모델 훈련은 주로 3단계로 구성됩니다.
- 첫 번째 단계: 모델 훈련 기본 상자 입력 및 출력 기능. NExT-Chat은 사전 훈련을 위해 Flickr-30K, RefCOCO, VisualGenome 및 상자 입력 및 출력이 포함된 기타 데이터 세트를 사용합니다. 훈련 과정에서 모든 LLM 매개변수가 훈련됩니다.
- 두 번째 단계: LLM의 지시 따르기 능력을 조정합니다. 일부 Shikra-RD, LLaVA-instruct 및 기타 지침을 통해 데이터를 미세 조정하면 모델이 인간의 요구 사항에 더 잘 대응하고 보다 인간적인 결과를 출력할 수 있습니다.
- 세 번째 단계: NExT-Chat 모델 분할 기능을 제공. 위의 두 가지 훈련 단계를 통해 모델은 이미 좋은 위치 모델링 기능을 갖추고 있습니다. 저자는 이 기능을 더욱 확장하여 출력을 마스크합니다. 실험 결과 NExT-Chat은 매우 적은 양의 마스크 주석 데이터와 훈련 시간(약 3시간)을 사용하여 우수한 분할 기능을 빠르게 달성할 수 있는 것으로 나타났습니다.
이러한 훈련 프로세스의 장점은 감지 프레임 데이터가 풍부하고 훈련 오버헤드가 더 적다는 것입니다.
NExT-Chat은 풍부한 감지 프레임 데이터에 대한 기본 위치 모델링 기능을 교육한 후 더 어렵고 주석이 부족한 분할 작업으로 빠르게 확장할 수 있습니다.
위 내용은 대규모 모델은 간단한 대화만으로 이미 이미지에 주석을 달 수 있습니다! Tsinghua & NUS의 연구 결과의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7715
7715
 15
1641
14
1395
52
1289
25
1232
29
15
1641
14
1395
52
1289
25
1232
29

 Worldcoin (WLD) 가격 예측 2025-2031 : WLD가 2031 년까지 4 달러에 도달 할 것인가?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD) 가격 예측 2025-2031 : WLD가 2031 년까지 4 달러에 도달 할 것인가?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD)은 Cryptocurrency 시장에서 고유 한 생체 인정 및 개인 정보 보호 메커니즘으로 눈에 띄고 많은 투자자의 관심을 끌고 있습니다. WLD는 혁신적인 기술, 특히 OpenAi 인공 지능 기술과 함께 Altcoins에서 뛰어난 성과를 거두었습니다. 그러나 향후 몇 년 안에 디지털 자산은 어떻게 행동 할 것인가? WLD의 미래 가격을 함께 예측합시다. 2025 WLD 가격 예측은 2025 년 WLD에서 상당한 성장을 달성 할 것으로 예상됩니다. 시장 분석에 따르면 평균 WLD 가격은 최대 $ 1.36로 $ 1.31에 도달 할 수 있습니다. 그러나 곰 시장에서 가격은 약 $ 0.55로 떨어질 수 있습니다. 이러한 성장 기대는 주로 WorldCoin2에 기인합니다.
 크로스 체인 거래는 무엇을 의미합니까? 크로스 체인 거래는 무엇입니까?
Apr 21, 2025 pm 11:39 PM
크로스 체인 거래는 무엇을 의미합니까? 크로스 체인 거래는 무엇입니까?
Apr 21, 2025 pm 11:39 PM
크로스 체인 거래를 지원하는 교환 : 1. Binance, 2. Uniswap, 3. Sushiswap, 4. Curve Finance, 5. Thorchain, 6. 1inch Exchange, 7. DLN 거래,이 플랫폼은 다양한 기술을 통해 다중 체인 자산 거래를 지원합니다.
 Aavenomics는 AAVE 프로토콜 토큰을 수정하고 쿼럼 수의 사람들에게 도달 한 토큰 재구매를 소개하는 권장 사항입니다.
Apr 21, 2025 pm 06:24 PM
Aavenomics는 AAVE 프로토콜 토큰을 수정하고 쿼럼 수의 사람들에게 도달 한 토큰 재구매를 소개하는 권장 사항입니다.
Apr 21, 2025 pm 06:24 PM
Aavenomics는 AAVE 프로토콜 토큰을 수정하고 Aavedao의 쿼럼을 구현 한 Token Repos를 소개하는 제안입니다. AAVE 프로젝트 체인 (ACI)의 설립자 인 Marc Zeller는 X에서 이것을 발표하여 계약의 새로운 시대를 표시한다고 지적했습니다. AAVE 체인 이니셔티브 (ACI)의 설립자 인 Marc Zeller는 AAVENOMICS 제안서에 AAVE 프로토콜 토큰 수정 및 토큰 리포지션 도입이 포함되어 있다고 X에서 AAVEDAO에 대한 쿼럼을 달성했다고 발표했습니다. Zeller에 따르면, 이것은 계약의 새로운 시대를 나타냅니다. Aavedao 회원국은 수요일에 주당 100 인 제안을지지하기 위해 압도적으로 투표했습니다.
 하이브리드 블록 체인 거래 플랫폼은 무엇입니까?
Apr 21, 2025 pm 11:36 PM
하이브리드 블록 체인 거래 플랫폼은 무엇입니까?
Apr 21, 2025 pm 11:36 PM
cryptocurrency 교환 선택에 대한 제안 : 1. 유동성 요구 사항의 경우 우선 순위는 순서 깊이와 강한 변동성 저항으로 인해 Binance, Gate.io 또는 Okx입니다. 2. 규정 준수 및 보안, 코인베이스, 크라켄 및 쌍둥이 자리는 엄격한 규제 승인을 받았습니다. 3. Kucoin의 소프트 스테이 킹 및 Bybit의 파생 설계 혁신적인 기능은 고급 사용자에게 적합합니다.
 Binance 전체 프로세스 전략에 대한 커널 에어 드롭 보상을받는 방법
Apr 21, 2025 pm 01:03 PM
Binance 전체 프로세스 전략에 대한 커널 에어 드롭 보상을받는 방법
Apr 21, 2025 pm 01:03 PM
암호 화폐의 번화 한 세계에서는 새로운 기회가 항상 나타납니다. 현재 Kerneldao (Kernel) 에어 드롭 활동은 많은 관심을 끌고 많은 투자자들의 관심을 끌고 있습니다. 그렇다면이 프로젝트의 기원은 무엇입니까? BNB 보유자는 어떤 이점을 얻을 수 있습니까? 걱정하지 마십시오. 다음은 당신을 위해 하나씩 공개 할 것입니다.
 'Black Monday Sell'은 Cryptocurrency 업계의 힘든 날입니다.
Apr 21, 2025 pm 02:48 PM
'Black Monday Sell'은 Cryptocurrency 업계의 힘든 날입니다.
Apr 21, 2025 pm 02:48 PM
cryptocurrency 시장의 급락으로 인해 투자자들 사이에 공황이 발생했으며 Dogecoin (Doge)은 가장 어려운 지역 중 하나가되었습니다. 가격은 급격히 하락했으며 분산 금융 (DEFI) (TVL)의 총 가치 잠금 장치도 크게 감소했습니다. "Black Monday"의 판매 물결은 cryptocurrency 시장을 휩쓸었고 Dogecoin은 처음으로 타격을 받았습니다. DefitVl은 2023 년 수준으로 떨어졌고 지난 달 통화 가격은 23.78% 하락했습니다. Dogecoin의 Defitvl은 주로 SOSO 가치 지수의 26.37% 감소로 인해 272 만 달러로 떨어졌습니다. 지루한 Dao 및 Thorchain과 같은 다른 주요 Defi 플랫폼도 TVL도 각각 24.04% 및 20으로 떨어졌습니다.
 가상 통화 가격의 상승 또는 하락은 왜입니까? 가상 통화 가격의 상승 또는 하락은 왜입니까?
Apr 21, 2025 am 08:57 AM
가상 통화 가격의 상승 또는 하락은 왜입니까? 가상 통화 가격의 상승 또는 하락은 왜입니까?
Apr 21, 2025 am 08:57 AM
가상 통화 가격 상승의 요인은 다음과 같습니다. 1. 시장 수요 증가, 2. 공급 감소, 3. 긍정적 인 뉴스, 4. 낙관적 시장 감정, 5. 거시 경제 환경; 감소 요인에는 다음이 포함됩니다. 1. 시장 수요 감소, 2. 공급 증가, 3. 부정적인 뉴스의 파업, 4. 비관적 시장 감정, 5. 거시 경제 환경.
 통화에서 레버리지 교환 순위 순위 서클 통화 서클에서 상위 10 개의 레버리지 거래소의 최신 권장 사항
Apr 21, 2025 pm 11:24 PM
통화에서 레버리지 교환 순위 순위 서클 통화 서클에서 상위 10 개의 레버리지 거래소의 최신 권장 사항
Apr 21, 2025 pm 11:24 PM
2025 년에 레버리지 거래, 보안 및 사용자 경험에서 뛰어난 성능을 보이는 플랫폼은 다음과 같습니다. 1. OKX, 고주파 거래자에게 적합하여 최대 100 배의 레버리지를 제공합니다. 2. Binance, 전 세계의 다중 통화 거래자에게 적합하며 125 배 높은 레버리지를 제공합니다. 3. Gate.io, 전문 파생 상품 플레이어에게 적합하며 100 배의 레버리지를 제공합니다. 4. 초보자 및 소셜 트레이더에게 적합한 Bitget, 최대 100 배의 레버리지를 제공합니다. 5. 크라켄은 꾸준한 투자자에게 적합하며 5 배의 레버리지를 제공합니다. 6. Bybit, Altcoin Explorers에 적합하며 20 배의 레버리지를 제공합니다. 7. 저비용 거래자에게 적합한 Kucoin, 10 배의 레버리지를 제공합니다. 8. 비트 피 넥스, 시니어 플레이에 적합합니다
