
 기술 주변기기
일체 포함
Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.
기술 주변기기
일체 포함
Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.
Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.

VidSGG(비디오 장면 그래프 생성)는 시각적 장면에서 개체를 식별하고 개체 간의 시각적 관계를 추론하는 것을 목표로 합니다.
이 작업을 수행하려면 장면 전체에 흩어져 있는 각 개체에 대한 포괄적인 이해뿐만 아니라 시간에 따른 개체의 움직임과 상호 작용에 대한 심층적인 연구가 필요합니다.
최근 Sun Yat-sen University의 연구자들은 최고의 인공 지능 저널인 IEEE T-IP에 논문을 게재했습니다. 그들은 관련 작업을 탐색한 결과 다음과 같은 사실을 발견했습니다. 각 개체 조합 쌍과 그 관계는 각각 공간 공동이 있습니다. -이미지 내 발생 상관관계, 서로 다른 이미지 간의 시간적 일관성/번역 상관관계.
논문 링크: https://arxiv.org/abs/2309.13237
연구진은 이러한 사전 지식을 바탕으로 사전 시공간 지식을 통합하기 위한 시공간 지식 임베딩 기반의 Transformer(STKET)를 제안했습니다. 지식은 다중 헤드 교차 주의 메커니즘에 통합되어 보다 대표적인 시각적 관계 표현을 학습합니다.
구체적으로, 공간적 동시발생과 시간적 변환 상관관계를 먼저 통계적으로 학습한 다음, 시공간적 지식 임베딩 레이어를 설계하여 시각적 표현과 지식 간의 상호작용을 완전히 탐색하고 각각 공간적 및 시간적 지식 임베딩을 생성합니다. 마지막으로 저자는 이러한 특징을 집계하여 최종 의미 라벨과 시각적 관계를 예측합니다.
많은 실험을 통해 이 기사에서 제안한 프레임워크가 현재 경쟁 알고리즘보다 훨씬 우수하다는 것을 알 수 있습니다. 현재 논문이 승인되었습니다.
논문 개요
장면 이해 분야의 급속한 발전과 함께 많은 연구자들이 장면 그래프 생성(SGG) 작업을 해결하기 위해 다양한 프레임워크를 사용하기 시작했으며 좋은 진전을 이루었습니다.
그러나 이러한 방법은 종종 단일 이미지만 고려하고 시계열에 존재하는 많은 양의 상황 정보를 무시하므로 대부분의 기존 장면 그래프 생성 알고리즘은 특정 비디오에 포함된 콘텐츠를 정확하게 식별할 수 없습니다. 시각적 관계.
따라서 많은 연구자들은 이 문제를 해결하기 위해 VidSGG(비디오 장면 그래프 생성) 알고리즘 개발에 전념하고 있습니다.
현재 작업은 주로 공간적, 시간적 관점에서 객체 수준의 시각적 정보를 수집하여 해당 시각적 관계 표현을 학습하는 데 중점을 두고 있습니다.
다양한 사물의 시각적 외양과 인터랙티브 액션의 큰 차이와 비디오 수집으로 인한 시각적 관계의 상당한 롱테일 분포로 인해 단순히 시각적 정보만 사용하는 것만으로도 모델이 잘못된 시각적인 것을 예측하는 결과를 낳기 쉽습니다. 관계.
위 문제에 대응하여 연구자들은 다음과 같은 두 가지 작업 측면을 수행했습니다.
첫째, 비디오 장면 그래프 생성 분야를 홍보하기 위해 훈련 샘플에 포함된 사전 시공간 지식을 마이닝하는 것이 제안되었습니다. 그중 사전 시공간 지식에는 다음이 포함됩니다.
1) 공간 동시 발생 상관: 특정 객체 범주 간의 관계는 특정 상호 작용으로 이어지는 경향이 있습니다.
2) 시간적 일관성/전환 상관 관계: 주어진 관계 쌍은 연속된 비디오 클립 전체에서 일관성을 유지하는 경향이 있거나 다른 특정 관계로 전환될 가능성이 높습니다.
두 번째로, 시공간 지식 임베딩 기반의 새로운 Transformer(Spatial-Temporal Knowledge-Embedded Transformer, STKET) 프레임워크를 제안합니다.
이 프레임워크는 사전 시공간 지식을 다중 헤드 교차 주의 메커니즘에 통합하여 보다 대표적인 시각적 관계 표현을 학습합니다. 테스트 벤치마크에서 얻은 비교 결과에 따르면, 연구진이 제안한 STKET 프레임워크가 기존의 최신 방법보다 성능이 우수하다는 것을 알 수 있습니다.
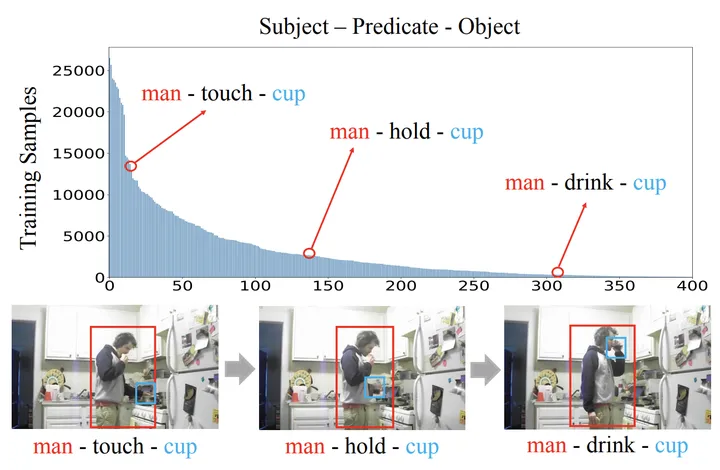
그림 1: 가변적인 시각적 외관과 시각적 관계의 롱테일 분포로 인해 비디오 장면 그래프 생성은 어려움으로 가득 차 있습니다.
시공간 지식 임베딩 기반 트랜스포머
공간 및 시간 지식 표현
시각적 관계를 추론할 때 인간은 시각적 단서뿐만 아니라 축적된 사전 지식도 활용합니다[1, 2]. 이에 영감을 받아 연구자들은 비디오 장면 그래프 생성 작업을 용이하게 하기 위해 훈련 세트에서 직접 사전 시공간 지식을 추출할 것을 제안합니다.
그 중에서 공간적 동시발생 상관관계는 주어진 물체가 결합될 때 그 시각적 관계 분포가 매우 편향된다는 점에서 구체적으로 나타납니다. (예를 들어 "사람"과 "컵" 사이의 시각적 관계 분포는 "개" 및 "개"와는 분명히 다름) "장난감" 간의 분포와 시간 전달 상관관계는 이전 순간의 시각적 관계가 주어지면 각 시각적 관계의 전환 확률이 크게 변경된다는 점에서 구체적으로 나타납니다. 예를 들어, 이전 순간의 시각적 관계가 "먹다"로 알려졌을 때, 다음 순간에 시각적 관계가 "쓰기"로 전환될 확률은 크게 감소합니다.
그림 2와 같이 주어진 사물의 조합이나 이전의 시각적 관계를 직관적으로 느낀 후에는 예측 공간이 크게 줄어들 수 있습니다.
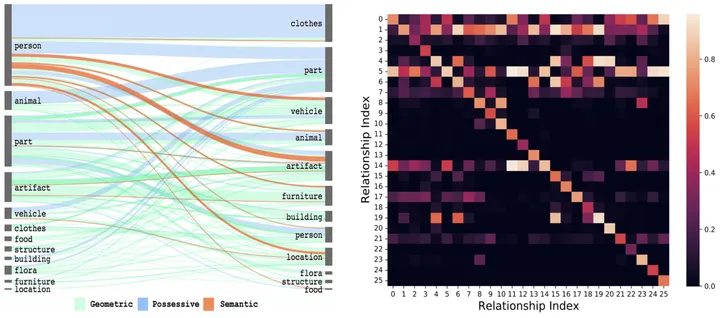
그림 2: 시각적 관계의 공간적 동시 발생 확률[3]과 시간적 전이 확률
구체적으로 i번째 유형 객체와 j번째 유형 객체의 조합에 대해, 그리고 이전 순간 x번째 유형의 관계에 대해 먼저 통계를 통해 해당 공간 동시 발생 확률 행렬 E^{i,j}와 시간 전이 확률 행렬 Ex^{i,j}를 구합니다.
그런 다음 이를 완전 연결 계층에 입력하여 해당 특징 표현을 얻고, 해당 목적 함수를 사용하여 모델이 학습한 지식 표현에 해당 사전 시공간 지식이 포함되어 있는지 확인합니다.
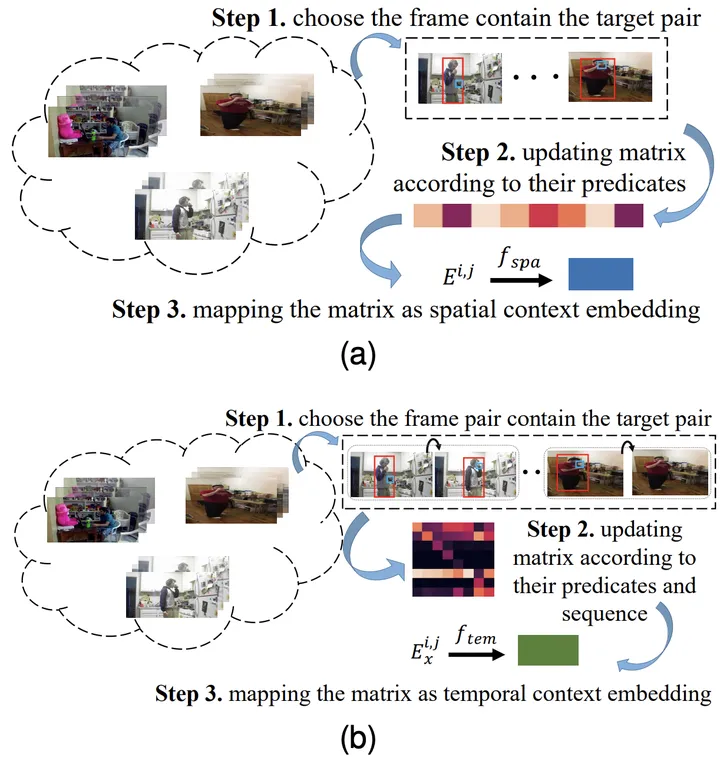
그림 3: 공간(a) 및 시간(b) 지식 표현을 학습하는 과정
Knowledge Embedding Attention Layer
공간 지식은 일반적으로 개체 정보 간의 위치, 거리 및 관계에 대한 정보를 포함합니다. . 반면에 시간적 지식은 행동 사이의 순서, 기간, 간격을 포함합니다.
고유한 특성을 고려하여 개별적으로 처리하면 전문적인 모델링을 통해 고유한 패턴을 보다 정확하게 포착할 수 있습니다.
따라서 연구자들은 시각적 표현과 시공간 지식 간의 상호 작용을 철저하게 탐색하기 위해 시공간 지식 임베딩 레이어를 설계했습니다.
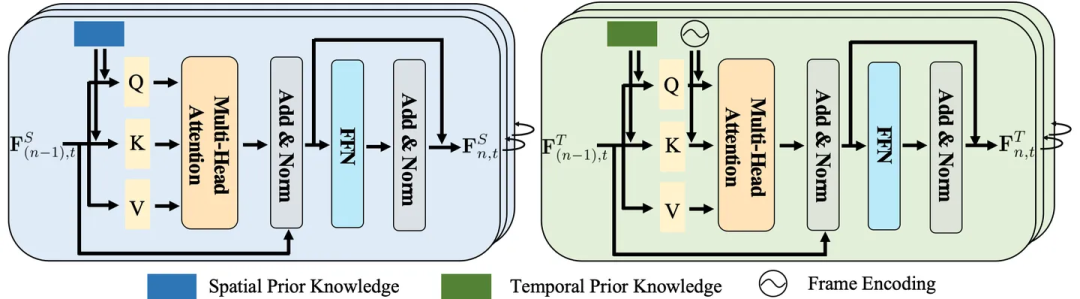
그림 4: 공간(왼쪽) 및 시간(오른쪽) 지식 임베딩 레이어
공간-시간 집계 모듈
앞서 언급한 것처럼 공간 지식 임베딩 레이어는 각 이미지 내의 공간적 일관성을 탐색합니다. 시간 지식 임베딩 레이어는 서로 다른 이미지 간의 시간 전달 상관 관계를 탐색하여 시각적 표현과 시공간 지식 간의 상호 작용을 완전히 탐색합니다.
그럼에도 불구하고 이 두 레이어는 가장 동적으로 변화하는 시각적 관계를 식별하는 데 도움이 되는 장기적인 상황 정보를 무시합니다.
이를 위해 연구원들은 각 객체 쌍의 이러한 표현을 집계하여 최종 의미 라벨과 그 관계를 예측하는 시공간 집계(STA) 모듈을 추가로 설계했습니다. 이는 서로 다른 프레임에 있는 동일한 주체-객체 쌍의 입력 공간적 및 시간적 내장 관계 표현으로 사용됩니다.
특히 연구원들은 동일한 개체 쌍의 이러한 표현을 연결하여 상황별 표현을 생성합니다.
그런 다음 서로 다른 프레임에서 동일한 주체-객체 쌍을 찾기 위해 예측 객체 레이블과 IoU(즉, Intersection over Union)를 채택하여 프레임에서 감지된 동일한 주체-객체 쌍을 일치시킵니다.
마지막으로 프레임 내 관계가 배치별로 서로 다른 표현을 갖는다는 점을 고려하여 슬라이딩 윈도우에서 가장 빠른 표현을 선택합니다.
실험 결과
제안한 프레임워크의 성능을 종합적으로 평가하기 위해 연구진은 기존의 영상 장면 그래프 생성 방식(STTran, TPI, APT)과의 비교 외에 고급 이미지 장면 그래프 생성 방식도 선택했습니다. (KERN, VCTREE, ReIDN, GPS-Net)을 비교합니다.
그 중 공정한 비교를 보장하기 위해 이미지 장면 그래프 생성 방법은 이미지의 각 프레임을 식별하여 특정 비디오에 해당하는 장면 그래프를 생성하는 목표를 달성합니다.
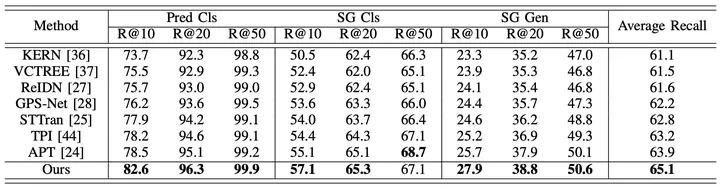
그림 5: Action Genome 데이터 세트에 대한 평가 지표로 Recall을 사용한 실험 결과

그림 6: Action Genome 데이터 세트에 대한 평가 지표로 Mean Recall을 사용한 실험 결과
위 내용은 Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7569
7569
 15
1386
52
87
11
61
19
28
107
15
1386
52
87
11
61
19
28
107

 Centos HDFS 구성을 확인하는 방법
Apr 14, 2025 pm 07:21 PM
Centos HDFS 구성을 확인하는 방법
Apr 14, 2025 pm 07:21 PM
CentOS 시스템에서 HDFS 구성 확인에 대한 완전한 안내서이 기사에서는 CentOS 시스템에서 HDF의 구성 및 실행 상태를 효과적으로 확인하는 방법을 안내합니다. 다음 단계는 HDF의 설정 및 작동을 완전히 이해하는 데 도움이됩니다. Hadoop 환경 변수 확인 : 먼저 Hadoop 환경 변수가 올바르게 설정되어 있는지 확인하십시오. 터미널에서 다음 명령을 실행하여 Hadoop이 올바르게 설치되고 구성되었는지 확인하십시오. Hadoopversion Check HDFS 구성 파일 : HDFS의 Core 구성 파일은/etc/hadoop/conf/directory에 있으며 Core-Site.xml 및 HDFS-Site.xml이 중요합니다. 사용
 Centos Shutdown 명령 줄
Apr 14, 2025 pm 09:12 PM
Centos Shutdown 명령 줄
Apr 14, 2025 pm 09:12 PM
CentOS 종료 명령은 종료이며 구문은 종료 [옵션] 시간 [정보]입니다. 옵션은 다음과 같습니다. -H 시스템 중지 즉시 옵션; -P 종료 후 전원을 끕니다. -R 다시 시작; -대기 시간. 시간은 즉시 (현재), 분 (분) 또는 특정 시간 (HH : MM)으로 지정할 수 있습니다. 추가 정보는 시스템 메시지에 표시 될 수 있습니다.
 Centos 설치 MySQL
Apr 14, 2025 pm 08:09 PM
Centos 설치 MySQL
Apr 14, 2025 pm 08:09 PM
Centos에 MySQL을 설치하려면 다음 단계가 필요합니다. 적절한 MySQL Yum 소스 추가. mysql 서버를 설치하려면 yum install mysql-server 명령을 실행하십시오. mysql_secure_installation 명령을 사용하여 루트 사용자 비밀번호 설정과 같은 보안 설정을 작성하십시오. 필요에 따라 MySQL 구성 파일을 사용자 정의하십시오. MySQL 매개 변수를 조정하고 성능을 위해 데이터베이스를 최적화하십시오.
 Docker 원리에 대한 자세한 설명
Apr 14, 2025 pm 11:57 PM
Docker 원리에 대한 자세한 설명
Apr 14, 2025 pm 11:57 PM
Docker는 Linux 커널 기능을 사용하여 효율적이고 고립 된 응용 프로그램 실행 환경을 제공합니다. 작동 원리는 다음과 같습니다. 1. 거울은 읽기 전용 템플릿으로 사용되며, 여기에는 응용 프로그램을 실행하는 데 필요한 모든 것을 포함합니다. 2. Union 파일 시스템 (Unionfs)은 여러 파일 시스템을 스택하고 차이점 만 저장하고 공간을 절약하고 속도를 높입니다. 3. 데몬은 거울과 컨테이너를 관리하고 클라이언트는 상호 작용을 위해 사용합니다. 4. 네임 스페이스 및 CGroup은 컨테이너 격리 및 자원 제한을 구현합니다. 5. 다중 네트워크 모드는 컨테이너 상호 연결을 지원합니다. 이러한 핵심 개념을 이해 함으로써만 Docker를 더 잘 활용할 수 있습니다.
 Centos에서 Pytorch 버전을 선택하는 방법
Apr 14, 2025 pm 06:51 PM
Centos에서 Pytorch 버전을 선택하는 방법
Apr 14, 2025 pm 06:51 PM
CentOS 시스템에 Pytorch를 설치할 때는 적절한 버전을 신중하게 선택하고 다음 주요 요소를 고려해야합니다. 1. 시스템 환경 호환성 : 운영 체제 : CentOS7 이상을 사용하는 것이 좋습니다. Cuda 및 Cudnn : Pytorch 버전 및 Cuda 버전은 밀접하게 관련되어 있습니다. 예를 들어, pytorch1.9.0은 cuda11.1을 필요로하고 Pytorch2.0.1은 cuda11.3을 필요로합니다. CUDNN 버전도 CUDA 버전과 일치해야합니다. Pytorch 버전을 선택하기 전에 호환 CUDA 및 CUDNN 버전이 설치되었는지 확인하십시오. 파이썬 버전 : Pytorch 공식 지점
 VSCODE 용 헤더 파일을 정의하는 방법
Apr 15, 2025 pm 09:09 PM
VSCODE 용 헤더 파일을 정의하는 방법
Apr 15, 2025 pm 09:09 PM
Visual Studio 코드를 사용하여 헤더 파일을 정의하는 방법은 무엇입니까? .h 또는 .hpp 접미사 이름 (예 : 클래스, 함수, 변수)을 사용하여 헤더 파일을 만들고 기호를 선언합니다. 소스 파일에 헤더 파일을 포함시키기 위해 #include 지시문을 사용하여 프로그램을 컴파일합니다. 헤더 파일이 포함되어 있고 선언 된 기호를 사용할 수 있습니다.
 CentOS8은 ssh를 다시 시작합니다
Apr 14, 2025 pm 09:00 PM
CentOS8은 ssh를 다시 시작합니다
Apr 14, 2025 pm 09:00 PM
SSH 서비스를 다시 시작하라는 명령은 SystemCTL SSHD를 다시 시작합니다. 자세한 단계 : 1. 터미널에 액세스하고 서버에 연결; 2. 명령을 입력하십시오 : SystemCTL SSHD 재시작; 3. 서비스 상태를 확인하십시오 : SystemCTL 상태 SSHD.
 Docker는 Yaml을 사용합니다
Apr 15, 2025 am 07:21 AM
Docker는 Yaml을 사용합니다
Apr 15, 2025 am 07:21 AM
Yaml은 Docker의 컨테이너, 이미지 및 서비스를 구성하는 데 사용됩니다. 구성하려면 : 컨테이너의 경우 Docker-Compose.yml에 이름, 이미지, 포트 및 환경 변수를 지정하십시오. 이미지의 경우 기본 이미지, 빌드 명령 및 기본 명령이 DockerFile에 제공됩니다. 서비스의 경우 Docker-Compose.service.yml에 이름, 미러, 포트, 볼륨 및 환경 변수를 설정하십시오.
