
Google은 SF 영화가 현실로 실현되지 않도록 새로운 '로봇 코드'를 공식화합니다
DeepMind 로봇팀은 최근 로봇이 실험실 외부에서 더 빠르고, 더 좋고, 안전한 결정을 내릴 수 있도록 돕기 위한 세 가지 새로운 개발을 발표했습니다. 우선, 그들은 로봇 사무 보조원이 사용자를 위해 더 많은 프린터 용지를 가져올 수 있지만 방해가 되는 인간 동료를 공격하지 않도록 "로봇 코드"를 통해 교육 데이터를 수집하는 시스템을 개발했습니다. 이번 개발을 통해 로봇의 효율성과 안전성이 더욱 향상될 것입니다.

Google의 데이터 수집 시스템인 AutoRT는 시각적 언어 모델(VLM)과 대규모 언어 모델(LLM)을 사용하여 함께 작업하여 환경을 이해하고 익숙하지 않은 상황에 적응하며 적절한 작업을 결정합니다. 이 시스템의 설계는 AI가 로봇을 작동할 때 인간, 동물, 날카로운 물체, 심지어 전자 제품과 관련된 선택을 하지 않도록 보장하기 위한 일련의 안전 중심 지침 원칙으로 설명되는 Asimov의 "로봇공학의 3가지 법칙"에서 영감을 받았습니다. . 일.
안전을 향상시키기 위해 DeepMind는 관절에 과도한 힘이 가해지면 로봇이 자동으로 작동을 멈추도록 프로그래밍했습니다. 또한 로봇에는 작업자가 로봇을 즉시 종료할 수 있는 물리적 킬 스위치가 장착되어 있습니다. Google은 7개월에 걸쳐 4개의 서로 다른 사무실 건물에 53대의 AutoRT 로봇을 배치하고 77,000회 이상의 시험을 실시했습니다. 로봇 중 일부는 인간 운영자에 의해 원격으로 제어되는 반면, 다른 로봇은 스크립트 또는 Google의 Robot Transformer(RT-2) AI 학습 모델을 기반으로 완전히 자율적으로 작동합니다. 이러한 안전 조치와 실험 설계는 로봇의 안전성과 제어 가능성을 보장합니다.
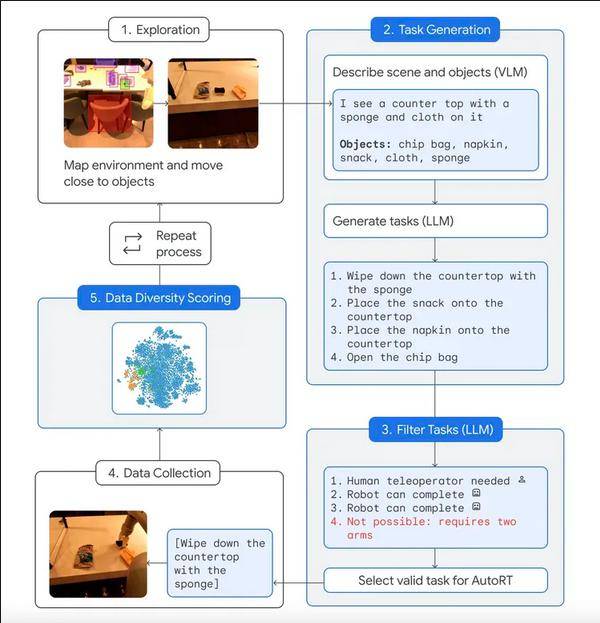
실험에 사용된 로봇은 주로 실용성을 목표로 하였으며, 카메라, 로봇팔, 이동식 베이스를 갖추고 있었습니다. 각 로봇은 VLM(AI Visual Language Module)을 사용해 환경을 인지하고 사물을 인식합니다. 다음으로 LLM(AI Large Language Module)은 '조리대 위에 간식 올려주기' 등 일련의 창의적 작업을 제안하고, 로봇이 수행할 적절한 작업을 선택하는 의사결정자 역할을 하게 된다. 이 시스템 설계는 로봇의 지능 수준을 향상시키고 다양한 작업 요구 사항에 더 잘 적응할 수 있도록 해줍니다.
위 내용은 구글, 공상과학 영화 줄거리가 현실화되는 것을 막기 위해 새로운 '로봇 사양' 개발의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!


















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



