
Linux 드라이버를 작성하는 과정에서 비동기 알림 기술은 매우 중요한 기술입니다. 효율적인 이벤트 처리 및 데이터 전송을 달성하여 시스템 성능과 응답 속도를 향상시킬 수 있습니다. 이번 글에서는 리눅스 드라이버 기술(4)_비동기 알림 기술의 구현 원리와 관련 기술에 대해 알아보겠습니다.
비동기 알림의 전체 이름은 "신호 기반 비동기 IO"입니다. "신호" 방법을 통해 획득할 것으로 예상되는 리소스를 사용할 수 있을 때 드라이버는 "신호"에 해당하는 지정된 애플리케이션에 적극적으로 알립니다. 여기서 사용된 애플리케이션 레이어는 “SIGIO” 신호입니다. 단계는
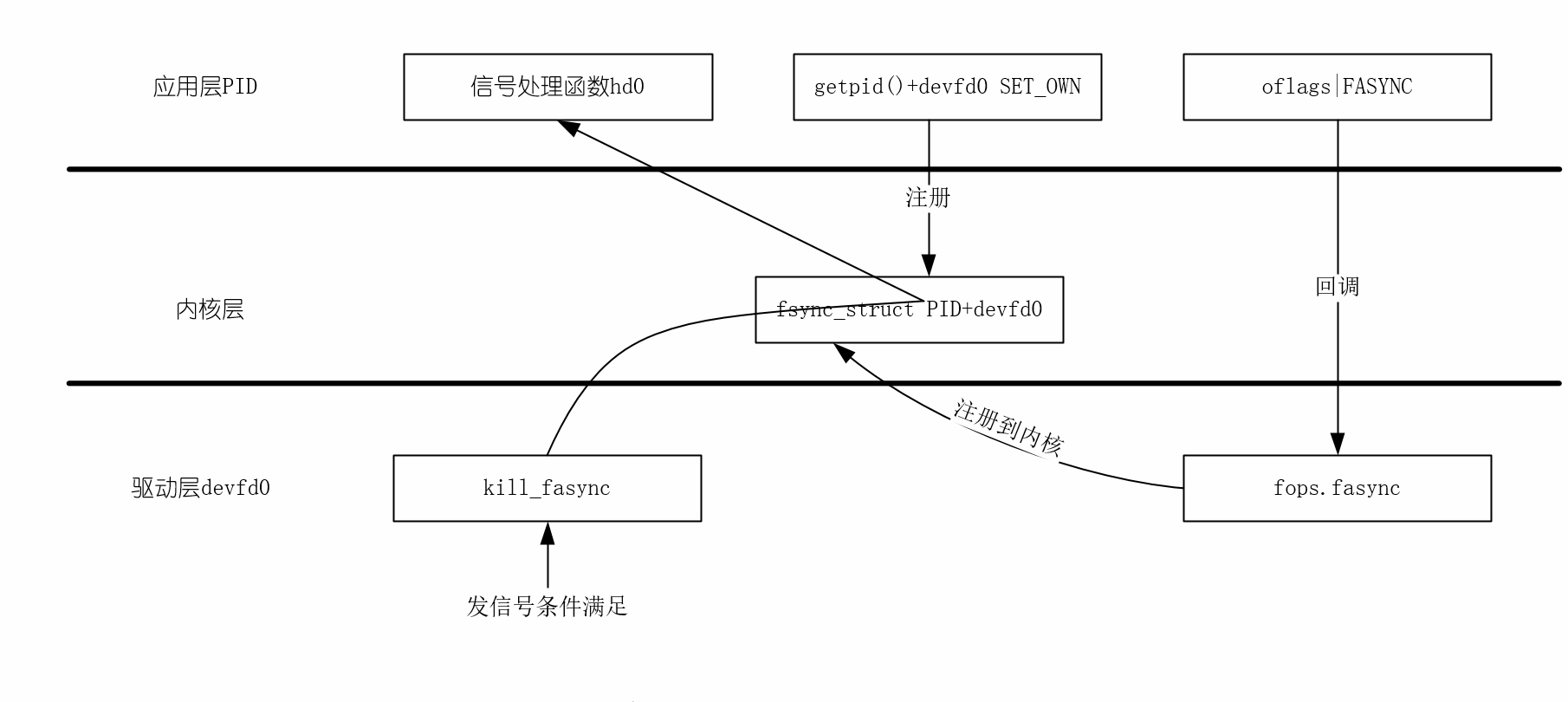
전체 메커니즘의 프레임워크:
“
”
다른 신호와 마찬가지로 응용 계층에서는 신호 처리 기능을 등록해야 합니다.
등록 방법은 여전히 signal() 또는 sigaction()
또한 애플리케이션 레이어도 운전자의 알림 체인 목록에 추가되어야 합니다. 추가된 코드는 다음과 같습니다
으아아아위 작업을 완료한 후 애플리케이션 계층 프로그램은 SIGIO 도착을 기다릴 수 있습니다.
애플리케이션 계층이 등록된 후 최종 전송은 장치 드라이버의 처리 방법에 따라 달라집니다. 장치가 비동기 알림 메커니즘을 지원하도록 하기 위해 애플리케이션 계층의 인터페이스를 참조하면 드라이버는 세 가지 작업을 수행합니다.
를 사용해야 하며 구조는 struct fasync_struct이고 함수는 fasync_helper() 및 kill_fasync()입니다. 으아아아
fasync_helper()의 기능은 fasync_struct 객체를 커널에 등록하는 것입니다. 애플리케이션 계층이 **fcntl(dev_fd, F_SETFL, oflags|FASYNC)를 실행할 때 드라이버의 fops를 콜백합니다. fasync(), 그래서 일반적으로 fasync()** 구현에 fasync_helper()를 넣습니다. 으아아아 다음 API는 SIGIO를 출시하고 다양한 필요에 따라 다양한 위치에 배치하는 것입니다.
으아아아 드라이버 템플릿static struct fasync_struct *fasync = NULL;
static irqreturn_t handler(int irq, void *dev)
{
kill_fasync(&fasync, SIGIO, POLLIN);
return IRQ_HANDLED;
}
static int demo_fasync(int fd, struct file *filp, int mode)
{
return fasync_helper(fd, filp, mode, &fasync);
}
struct file_operations fops = {
...
.fasync = demo_fasync,
...
}
static int __init demo_init(void)
{
...
request_irq(irq, handler, IRQF_TRIGGER_RISING, "demo", NULL);
...
}
总之,异步通知技术是Linux驱动程序编写过程中不可或缺的一部分。它可以实现高效的事件处理和数据传输,提高系统的性能和响应速度。希望本文能够帮助读者更好地理解Linux驱动技术(四) _异步通知技术的实现原理和相关技术。
위 내용은 리눅스 드라이버 기술 심층 고찰(4)_비동기 알림 기술의 구현 원리 및 관련 기술의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



