

Nanda Yu Yang의 심층 해석: '세계 모델'이란 무엇입니까?

미디어가 소라를 과대평가하면서 OpenAI의 입문 자료에서는 소라를 '월드 시뮬레이터'라고 부르는데, 월드 모델이라는 용어가 다시 등장했지만, 월드 모델을 소개하는 기사는 거의 없습니다.
여기서 월드 모델이 무엇인지 검토하고 소라가 월드 시뮬레이터인지 논의합니다.
세계 모델/세계 모델이란 무엇입니까
AI 분야에서 세계/세계, 환경/환경이라는 단어를 언급할 때는 일반적으로 에이전트/에이전트와 구별하기 위해 사용합니다.
에이전트에 대해 가장 많이 연구되는 분야는 강화학습과 로봇공학입니다.
그러면 세계 모델과 세계 모델링이 로봇 공학 분야의 논문에 가장 먼저, 가장 자주 등장한다는 것을 알 수 있습니다.
오늘날 가장 큰 영향을 미치는 단어 세계 모델은 Jurgen이 2018년 arxiv에 게시한 "world models"이라는 제목의 기사일 것입니다. 해당 기사는 결국 NeurIPS'18에 게재되었습니다.
이 논문은 세계 모델이 무엇인지 정의하지 않지만, 1971년 문헌을 인용하여 인지 과학에서 인간 두뇌의 정신 모델에 비유합니다.
정신 모델은 주변 세계에 대한 인간 두뇌의 거울 이미지입니다.
위키피디아에 소개된 정신 모델은 인지, 추론, 의사 결정 과정에 참여할 수 있음을 분명히 지적합니다. 그리고 정신 모델의 경우 주로 정신 표현과 정신 시뮬레이션이라는 두 부분으로 구성됩니다.
인지, 추론 및 의사 결정에 중요한 역할을 한다고 가정된 외부 현실의 내부 표현입니다. 이 용어는 1943년 Kenneth Craik이 만들어낸 용어로, 마음이 현실의 "소규모 모델"을 구성한다고 제안했습니다. 이벤트를 예측하는 데 사용됩니다.
이 시점에서는 여전히 약간 혼란스럽습니다. 하지만 논문의 구조 다이어그램은 세계 모델이 무엇인지 명확하게 설명합니다.
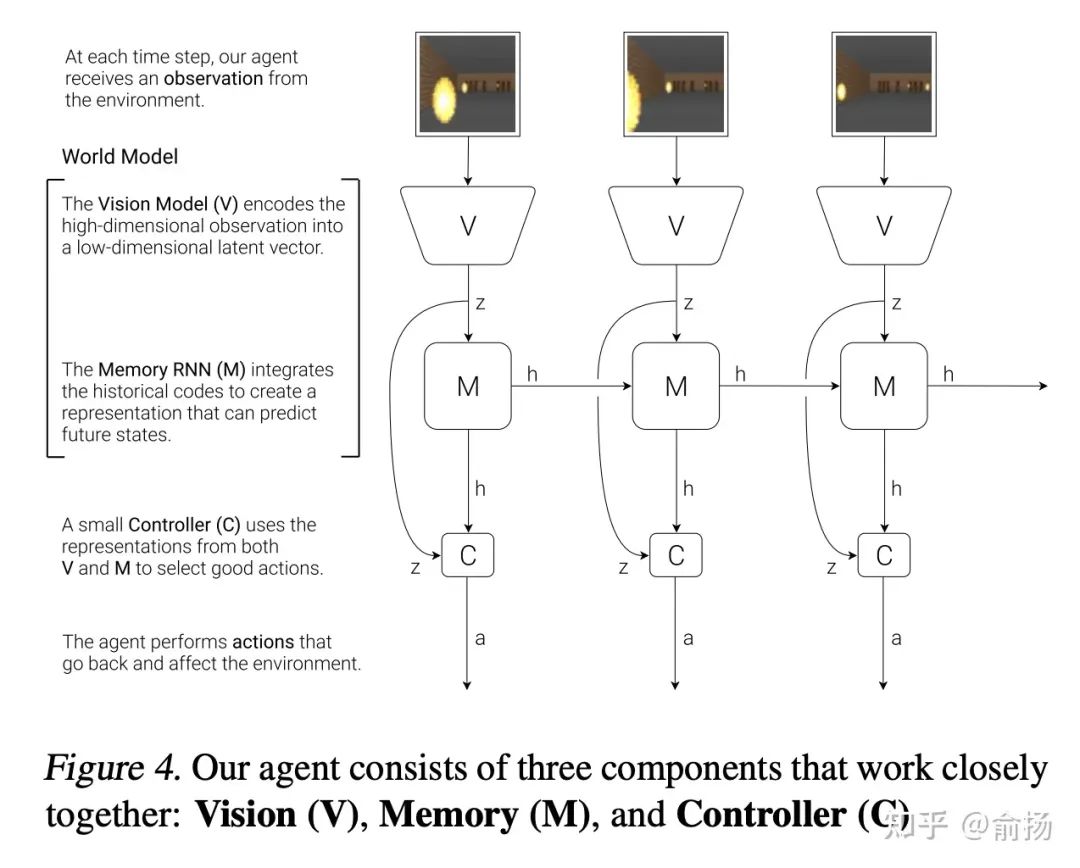
그림에서 수직 V->z는 VAE에 의해 구현된 관측값의 저차원 표현입니다. 수평 M->h->M->h는 다음과 같습니다. RNN으로 구현된 시퀀스의 예측된 다음 순간을 표현하면 두 부분이 합쳐져 World Model이 됩니다.
즉, World 모델은 주로 상태 표현과 전환 모델을 포함하며, 이는 정신적 표현과 정신적 시뮬레이션에도 해당됩니다.
위 사진을 보시면 서열 예측은 모두 세계 모델이 아닌가 하는 생각이 드실 겁니다.
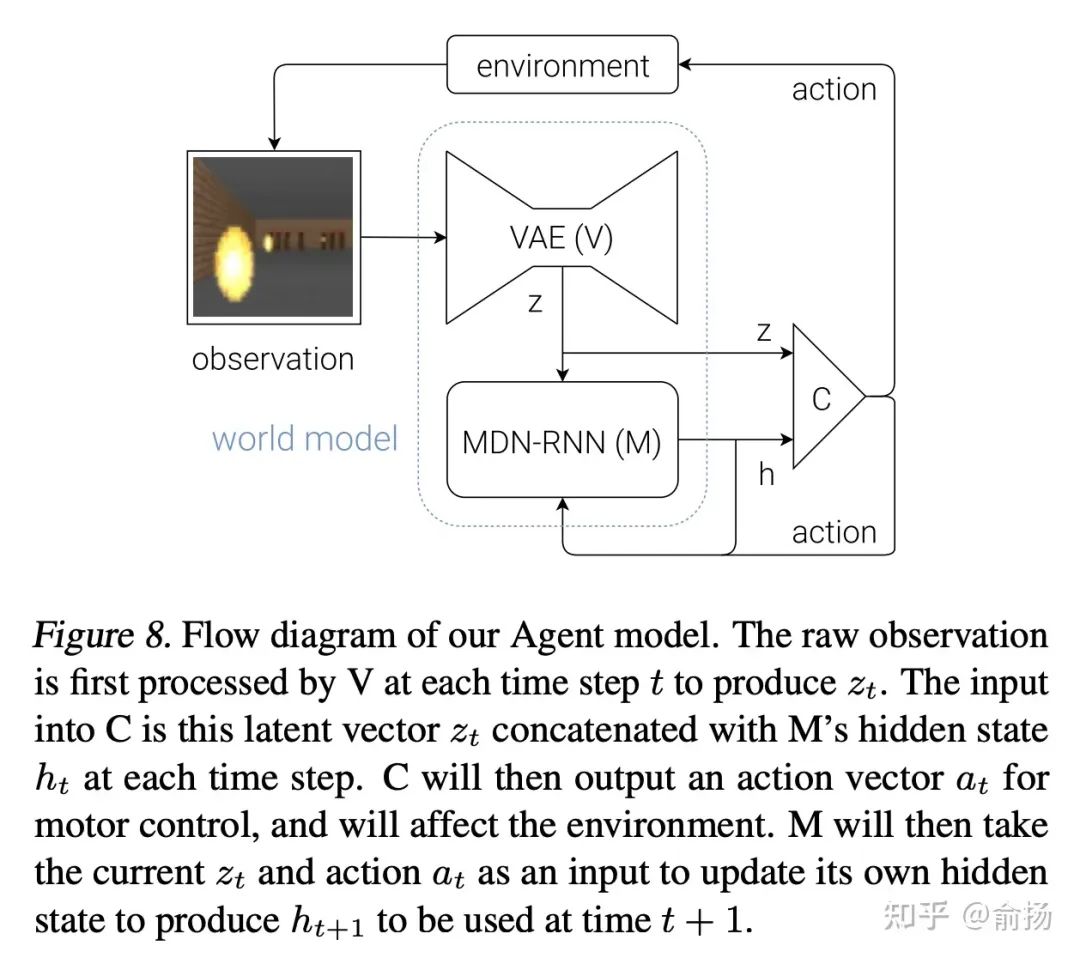
사실 강화학습에 익숙한 학생들은 이 그림의 구조가 잘못된(불완전) 것을 한 눈에 알 수 있는데, 실제 구조는 아래 그림과 같습니다. RNN의 입력은 z 뿐만 아니라 또한 액션도 일반적인 시퀀스 예측이 아닙니다(액션을 추가하면 큰 차이가 발생합니까? 예, 액션을 추가하면 데이터 배포가 자유롭게 변경될 수 있으므로 큰 문제가 발생합니다).
Jurgen의 논문은 강화 학습 분야에 속합니다.
그렇다면 강화학습에는 모델 기반 RL이 많이 있지 않나요? 모델과 월드 모델의 차이점은 무엇인가요? 대답은 차이가 없고 똑같다는 것입니다. Jurgen이 먼저 말했어요
기본적인 의미는 모델 기반 RL 작업이 아무리 많이 수행되더라도 저는 모델을 하기 위해 RNN을 발명했고 그냥 하고 싶다는 것입니다.
Jurgen의 기사 초기 버전에서 그는 모델 기반 RL을 많이 언급했지만 모델에서 RL을 완전히 훈련하지는 않았습니다.
RL이 모델에서 완전히 훈련되지 않았다는 사실은 실제로 모델 기반 RL과 모델의 차이가 아니라 모델 기반 RL 방향에 대한 오랜 좌절감입니다. 모델이 충분히 정확하지 않고 RL이 완전히 모델로 훈련된 것은 매우 효과적입니다. 이 문제는 최근에야 해결되었습니다.
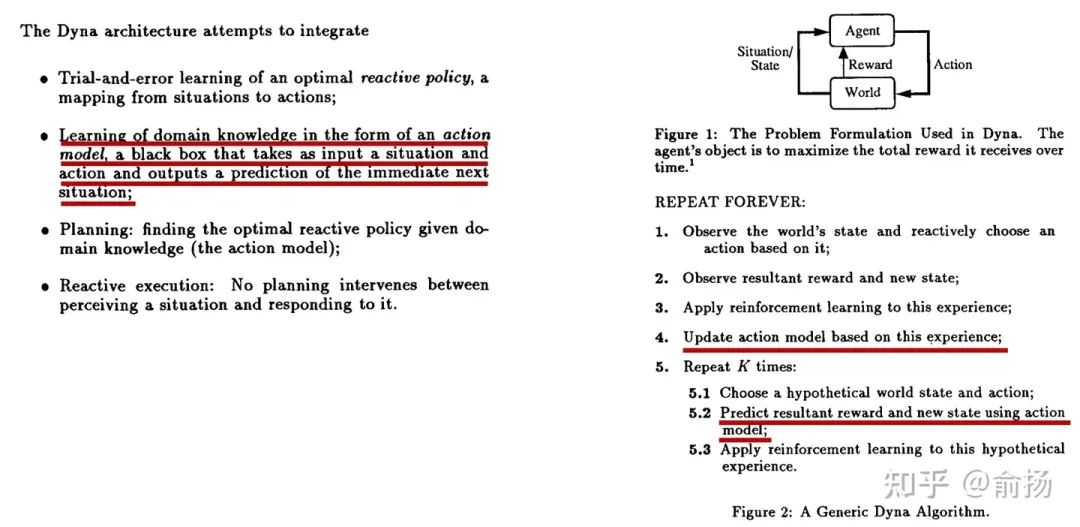
Smart Sutton은 오래전부터 부정확한 모델의 문제를 깨달았습니다. 1990년 Dyna 프레임워크를 제안한 동적 프로그래밍 기반 학습, 계획 및 반응을 위한 통합 아키텍처(Integrated Architectures for Learning, Planning and Reacting based on Dynamic Programming)(컨퍼런스가 된 최초의 워크숍인 ICML에 게시됨)에서는 이 모델을 액션 모델이라고 부르며 결과 예측을 강조했습니다. 행동 실행.
RL은 잘못된 전략으로 인한 부정확한 모델 학습을 방지하기 위해 모델(5행)에서 학습하는 동안 실제 데이터(3행)에서 학습합니다.
세계 모델이 의사 결정에 매우 중요하다는 것을 알 수 있습니다. 정확한 세계 모델을 얻을 수 있다면 세계 모델에 대한 시행착오를 통해 현실에서 최적의 결정을 찾을 수 있습니다.
이것이 바로 세계 모델의 핵심 기능입니다. 즉, 반사실 추론, 즉 데이터에서 볼 수 없는 결정에 대해서도 결정의 결과를 세계 모델에서 추론할 수 있다는 것입니다.
인과 추론을 이해하는 학생들은 반사실 추론이라는 용어에 익숙할 것입니다. Turing Award 수상자인 Judea Pearl의 인기 과학 책인 Why 책에서는 인과 관계 사다리가 그려져 있는데, 이것이 바로 오늘날입니다. 대부분의 예측 모델이 주로 수행하는 작업은 중간 계층이며, 강화 학습의 탐색은 전형적인 개입이며, 상상을 통해 가정에 대한 질문에 대답합니다. 반사실 추론을 위해 Judea가 그린 도식 다이어그램은 과학자들이 두뇌에서 상상하는 것이며, 이는 Jurgen이 그의 논문에서 사용한 도식 다이어그램과 유사합니다.
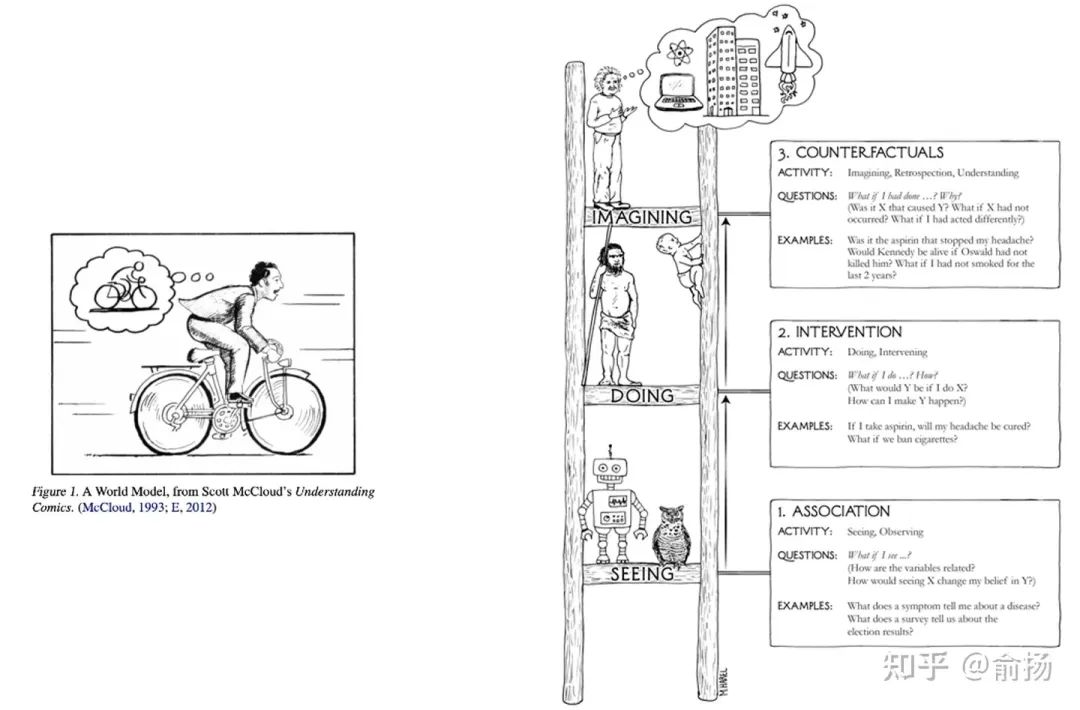
왼쪽: Jurgen의 논문에 있는 세계 모델의 개략도. 오른쪽: 유대서에 나오는 원인과 결과의 사다리.
이 시점에서 AI 연구자들이 추구하는 세계 모델은 데이터를 초월하여 반사실적 추론을 수행하고, 만약 질문에 대답하는 능력을 추구하는 것이라고 요약할 수 있습니다. 이는 인간이 타고난 능력이지만, 현재의 AI는 아직 이 능력이 매우 부족합니다. 획기적인 발전이 이루어지면 AI 의사결정 능력이 크게 향상되어 완전 자율주행과 같은 시나리오 적용이 가능해진다.
소라는 월드 시뮬레이터인가
시뮬레이터라는 단어는 엔지니어링 분야에서 더 많이 사용되는데요. 월드 모델처럼 기능하며, 현장에서 구현하기 어려운 고비용, 고위험 시행착오를 시도합니다. 현실 세계. OpenAI는 문구를 재구성하려는 것 같지만 의미는 그대로 유지됩니다.
소라가 생성한 영상은 모호한 프롬프트 단어로만 안내할 수 있어 정확한 제어가 어렵습니다. 따라서 이는 비디오 도구에 가깝고 What If 질문에 정확하게 답하기 위한 반사실적 추론 도구로 사용하기가 어렵습니다.
데모 영상이 훈련 데이터와 얼마나 다른지 완전히 불분명하기 때문에 소라의 생성 능력이 얼마나 강한지 평가하기조차 어렵습니다.
더 실망스러운 점은 이 데모를 보면 소라가 물리 법칙을 정확하게 배우지 못했다는 점입니다. 소라가 생성한 영상에서 물리법칙과의 불일치를 지적하는 사람을 본 적이 있습니다. [OpenAI가 빈센트 영상 모델을 출시했습니다. 소라, AI는 움직이는 물리적 세계를 이해할 수 있습니다. 이것이 세계 모델인가요? 무슨 뜻이에요? ]
OpenAI에서 출시하는 데모는 CG에서 생성된 데이터를 포함하여 매우 충분한 교육 데이터를 기반으로 해야 한다고 생각합니다. 그러나 그럼에도 불구하고 소수의 변수를 갖는 방정식으로 설명할 수 있는 물리법칙은 아직 파악되지 않고 있다.
OpenAI는 소라가 물리적 세계의 시뮬레이터로 가는 길을 증명했다고 믿지만 단순히 데이터를 쌓는 것은 더 발전된 지능 기술로 가는 길이 아닌 것 같습니다.
위 내용은 Nanda Yu Yang의 심층 해석: '세계 모델'이란 무엇입니까?의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7476
7476
 15
1377
52
77
11
49
19
19
32
15
1377
52
77
11
49
19
19
32

 MySQL을 해결하는 방법을 시작할 수 없습니다
Apr 08, 2025 pm 02:21 PM
MySQL을 해결하는 방법을 시작할 수 없습니다
Apr 08, 2025 pm 02:21 PM
MySQL 시작이 실패하는 데는 여러 가지 이유가 있으며 오류 로그를 확인하여 진단 할 수 있습니다. 일반적인 원인에는 포트 충돌 (포트 점유 체크 및 구성 수정), 권한 문제 (서비스 실행 사용자 권한 실행), 구성 파일 오류 (파라미터 설정 확인), 데이터 디렉토리 손상 (데이터 복원 또는 테이블 공간 재건), IBDATA 테이블 공간 문제 (IBDATA1 파일 확인), 플러그로드 (확인 오류 로그)가 포함됩니다. 문제를 해결할 때 오류 로그를 기반으로 문제를 분석하고 문제의 근본 원인을 찾고 문제를 방지하고 해결하기 위해 정기적으로 데이터를 백업하는 습관을 개발해야합니다.
 MySQL이 JSON을 반환 할 수 있습니다
Apr 08, 2025 pm 03:09 PM
MySQL이 JSON을 반환 할 수 있습니다
Apr 08, 2025 pm 03:09 PM
MySQL은 JSON 데이터를 반환 할 수 있습니다. json_extract 함수는 필드 값을 추출합니다. 복잡한 쿼리의 경우 where 절을 사용하여 JSON 데이터를 필터링하지만 성능 영향에주의하십시오. JSON에 대한 MySQL의 지원은 지속적으로 증가하고 있으며 최신 버전 및 기능에주의를 기울이는 것이 좋습니다.
 산성 특성 이해 : 신뢰할 수있는 데이터베이스의 기둥
Apr 08, 2025 pm 06:33 PM
산성 특성 이해 : 신뢰할 수있는 데이터베이스의 기둥
Apr 08, 2025 pm 06:33 PM
데이터베이스 산 속성에 대한 자세한 설명 산 속성은 데이터베이스 트랜잭션의 신뢰성과 일관성을 보장하기위한 일련의 규칙입니다. 데이터베이스 시스템이 트랜잭션을 처리하는 방법을 정의하고 시스템 충돌, 전원 중단 또는 여러 사용자의 동시 액세스가 발생할 경우에도 데이터 무결성 및 정확성을 보장합니다. 산 속성 개요 원자력 : 트랜잭션은 불가분의 단위로 간주됩니다. 모든 부분이 실패하고 전체 트랜잭션이 롤백되며 데이터베이스는 변경 사항을 유지하지 않습니다. 예를 들어, 은행 송금이 한 계정에서 공제되지만 다른 계정으로 인상되지 않은 경우 전체 작업이 취소됩니다. BeginTransaction; updateAccountssetBalance = Balance-100WH
 마스터 SQL 한계 절 항의 : 쿼리의 행 수 제어
Apr 08, 2025 pm 07:00 PM
마스터 SQL 한계 절 항의 : 쿼리의 행 수 제어
Apr 08, 2025 pm 07:00 PM
sqllimit 절 : 쿼리 결과의 행 수를 제어하십시오. SQL의 한계 절은 쿼리에서 반환 된 행 수를 제한하는 데 사용됩니다. 이것은 대규모 데이터 세트, 페이지 진화 디스플레이 및 테스트 데이터를 처리 할 때 매우 유용하며 쿼리 효율성을 효과적으로 향상시킬 수 있습니다. 구문의 기본 구문 : SelectColumn1, Collect2, ... Fromtable_namelimitnumber_of_rows; 번호_of_rows : 반환 된 행 수를 지정하십시오. 오프셋이있는 구문 : SelectColumn1, Column2, ... Fromtable_namelimitOffset, number_of_rows; 오프셋 : skip
 고로드 애플리케이션의 MySQL 성능을 최적화하는 방법은 무엇입니까?
Apr 08, 2025 pm 06:03 PM
고로드 애플리케이션의 MySQL 성능을 최적화하는 방법은 무엇입니까?
Apr 08, 2025 pm 06:03 PM
MySQL 데이터베이스 성능 최적화 안내서 리소스 집약적 응용 프로그램에서 MySQL 데이터베이스는 중요한 역할을 수행하며 대규모 트랜잭션 관리를 담당합니다. 그러나 응용 프로그램 규모가 확장됨에 따라 데이터베이스 성능 병목 현상은 종종 제약이됩니다. 이 기사는 일련의 효과적인 MySQL 성능 최적화 전략을 탐색하여 응용 프로그램이 고 부하에서 효율적이고 반응이 유지되도록합니다. 실제 사례를 결합하여 인덱싱, 쿼리 최적화, 데이터베이스 설계 및 캐싱과 같은 심층적 인 주요 기술을 설명합니다. 1. 데이터베이스 아키텍처 설계 및 최적화 된 데이터베이스 아키텍처는 MySQL 성능 최적화의 초석입니다. 몇 가지 핵심 원칙은 다음과 같습니다. 올바른 데이터 유형을 선택하고 요구 사항을 충족하는 가장 작은 데이터 유형을 선택하면 저장 공간을 절약 할 수있을뿐만 아니라 데이터 처리 속도를 향상시킬 수 있습니다.
 MySQL의 주요 키는 Null 일 수 있습니다
Apr 08, 2025 pm 03:03 PM
MySQL의 주요 키는 Null 일 수 있습니다
Apr 08, 2025 pm 03:03 PM
기본 키는 데이터베이스의 각 행을 고유하게 식별하는 키 속성이기 때문에 MySQL 기본 키는 비어있을 수 없습니다. 기본 키가 비어 있으면 레코드를 고유하게 식별 할 수 없으므로 데이터 혼동으로 이어질 수 있습니다. 자체 점수 정수 열 또는 UUID를 기본 키로 사용하는 경우 효율성 및 우주 점유와 같은 요소를 고려하고 적절한 솔루션을 선택해야합니다.
 MongoDB 데이터베이스 비밀번호를 보는 Navicat의 방법
Apr 08, 2025 pm 09:39 PM
MongoDB 데이터베이스 비밀번호를 보는 Navicat의 방법
Apr 08, 2025 pm 09:39 PM
해시 값으로 저장되기 때문에 MongoDB 비밀번호를 Navicat을 통해 직접 보는 것은 불가능합니다. 분실 된 비밀번호 검색 방법 : 1. 비밀번호 재설정; 2. 구성 파일 확인 (해시 값이 포함될 수 있음); 3. 코드를 점검하십시오 (암호 하드 코드 메일).
 Prometheus MySQL Expler를 사용하여 MySQL 및 MariaDB 액 적을 모니터링하십시오
Apr 08, 2025 pm 02:42 PM
Prometheus MySQL Expler를 사용하여 MySQL 및 MariaDB 액 적을 모니터링하십시오
Apr 08, 2025 pm 02:42 PM
MySQL 및 MariaDB 데이터베이스의 효과적인 모니터링은 최적의 성능을 유지하고 잠재적 인 병목 현상을 식별하며 전반적인 시스템 신뢰성을 보장하는 데 중요합니다. Prometheus MySQL Expler는 능동적 인 관리 및 문제 해결에 중요한 데이터베이스 메트릭에 대한 자세한 통찰력을 제공하는 강력한 도구입니다.
