

명령 하나만으로 커피를 만들고, 레드와인을 붓고, 못을 박는 등의 작업이 가능한 칭화의 스마트 코파가 출시됐다.

최근에는 체화지능(embodied Intelligence) 방향으로 많은 진전이 있었습니다. Google의 RT-H부터 OpenAI와 Figure가 공동으로 제작한 Figure 01에 이르기까지 로봇은 더욱 상호 작용적이고 다양해지고 있습니다.
미래에 로봇이 사람들의 일상생활에서 보조자가 된다면 로봇이 어떤 작업을 수행할 수 있을 것으로 기대하시나요? 김이 모락모락 나는 손으로 끓인 커피를 만들고, 바탕 화면을 정리하고, 로맨틱한 데이트 준비까지 도와주는 칭화의 새로운 지능 구현 프레임워크인 'CoPa'는 단 하나의 명령으로 이러한 작업을 완료할 수 있습니다.
CoPa(Robotic Manipulation through Spatial Constraints of Parts)는 칭화대학교 로봇공학 연구팀이 Gao Yang 교수가 이끄는 최신 지능형 프레임워크입니다. 이 프레임워크는 다양한 시나리오에서 장거리 작업과 복잡한 3D 동작에 직면할 때 로봇의 일반화 능력을 처음으로 실현합니다.

논문 주소: https://arxiv.org/abs/2403.08248
프로젝트 홈페이지: https://copa-2024.github.io/
대규모 필요로 인해 시각적 언어 모델(VLM)의 고유한 응용 프로그램인 CoPa는 특별한 교육 없이 개방형 시나리오에서 일반화할 수 있으며 복잡한 지침을 처리할 수 있습니다. CoPa의 가장 놀라운 점은 장면 속 물체의 물리적 특성에 대한 깊은 이해와 정확한 계획 및 조작 능력을 보여주는 능력입니다.
예를 들어, CoPa는 연구자들이 손으로 끓인 커피 한 잔을 만드는 데 도움을 줄 수 있습니다. 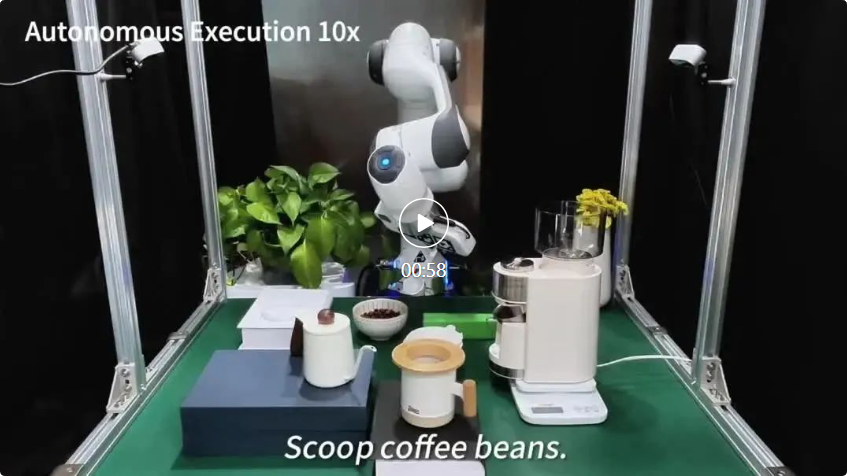
이 작업에서 CoPa는 복잡한 탁상 디스플레이에서 각 개체의 역할을 이해할 수 있을 뿐만 아니라 정확한 제어를 통해 제어를 완료할 수 있습니다. 통제. 예를 들어, "주전자의 물을 깔때기에 붓는다"는 작업에서는 로봇이 주전자를 깔때기 위로 이동시킨 후, 물이 주전자 입구에서 깔때기로 흘러 들어갈 수 있도록 정확한 각도로 회전시킵니다.
CoPa는 로맨틱한 데이트도 신중하게 준비할 수 있습니다. 연구원들의 데이트 요구 사항을 이해한 후 CoPa는 그들이 아름다운 서양식 식탁을 차릴 수 있도록 도와주었습니다. 
CoPa는 사용자의 요구를 깊이 이해하면서도 물체를 정확하게 조작하는 능력도 보여줍니다. 예를 들어 '꽃병에 꽃 꽂기' 작업에서는 로봇이 먼저 꽃 줄기를 잡고 꽃병을 향할 때까지 회전시킨 뒤 마지막으로 꽂는다.

방법 소개
알고리즘 흐름
대부분의 작업 작업은 물체를 잡는 단계와 작업을 완료하는 데 필요한 후속 작업의 두 단계로 나눌 수 있습니다. 예를 들어, 서랍을 열 때는 먼저 서랍 손잡이를 잡고 직선을 따라 서랍을 당겨 빼내야 합니다. 이를 바탕으로 연구진은 먼저 물체를 파는 로봇의 자세를 생성하는 '작업 중심 파악 모듈(Task-Oriented Grasping)'을 통해, 다음으로 '작업 관련 동작 계획'을 통해 두 단계를 설계했다. 모듈(Task-Aware) "Motion Planning)"은 잡은 후 작업을 완료하는 데 필요한 포즈를 생성합니다. 인접한 자세 간 로봇의 이동은 전통적인 경로 계획 알고리즘을 통해 달성될 수 있습니다.
중요 부품 감지 모듈
연구원들은 대부분의 조작 작업에는 장면의 개체에 대한 자세한 "부분 수준 이해"가 필요하다는 사실을 관찰했습니다. 예를 들어, 칼로 자를 때는 칼날 대신 손잡이를 잡고, 안경을 쓸 때는 렌즈 대신 프레임을 잡습니다. 연구팀은 이러한 관찰을 바탕으로 현장에서 작업과 관련된 부분을 찾아내기 위해 '거친 부분부터 미세한 부분까지 접지 모듈'을 설계했습니다. 구체적으로 CoPa는 먼저 대략적인 객체 감지를 통해 장면에서 작업과 관련된 객체를 찾은 다음, 세밀한 부분 감지를 통해 이러한 객체에서 작업과 관련된 부분을 찾습니다.

"작업 지향 그래빙 모듈"에서 CoPa는 먼저 중요한 부품 감지 모듈을 통해 그래빙 위치(예: 도구의 손잡이)를 찾습니다. 이 위치 정보는 GraspNet(할 수 있는 도구)을 필터링하는 데 사용됩니다. 가능한 모든 쥐는 자세의 장면) 모델을 생성한 다음 최종 쥐는 자세를 얻습니다.
작업 관련 모션 기획 모듈
시각 언어의 대형 모델이 로봇의 작동 작업을 돕기 위해 본 연구에서는 대형 모델이 언어로 추론할 수 있을 뿐만 아니라 로봇 작동을 용이하게 하는 인터페이스를 설계해야 합니다. 연구팀은 작업을 실행하는 동안 작업과 관련된 객체가 일반적으로 많은 공간적 기하학적 제약을 받는다는 사실을 발견했습니다. 예를 들어, 휴대폰을 충전할 때는 충전 헤드가 충전 포트를 향해야 하며, 병 뚜껑을 닫을 때는 병 입구에 캡을 똑바로 놓아야 합니다. 연구팀은 이를 바탕으로 시각적 언어 대형 모델과 로봇 사이의 가교로서 공간적 제약을 활용할 것을 제안했다. 구체적으로 CoPa는 먼저 대규모 시각적 언어 모델을 사용하여 작업 관련 개체가 작업을 완료할 때 충족해야 하는 공간 제약 조건을 생성한 다음 해결 모듈을 사용하여 이러한 제약 조건을 기반으로 로봇의 자세를 해결합니다.

실험 결과
CoPa 역량 평가
CoPa는 실제 운영 작업에서 강력한 일반화 역량을 입증했습니다. CoPa는 시각적 언어의 대규모 모델에 내장된 상식적 지식을 사용함으로써 장면에 있는 객체의 물리적 특성을 깊이 이해하고 있습니다.
예를 들어, "망치 못 만들기" 작업에서 CoPa는 먼저 망치의 손잡이를 잡은 다음 망치 머리가 못을 향할 때까지 망치를 회전시킨 다음 마지막으로 아래쪽으로 망치질을 했습니다. 이 작업에는 망치 손잡이, 망치 표면 및 못 표면의 정확한 식별과 공간적 관계에 대한 완전한 이해가 필요했으며, 이는 장면에 있는 물체의 물리적 특성에 대한 CoPa의 심층적인 이해를 입증했습니다.
"지우개를 서랍에 넣는 작업"에서 CoPa는 먼저 지우개의 위치를 알아냈고, 그 후 지우개 부분이 종이에 싸여 있는 것을 발견하고 그 부분을 교묘하게 잡아서 확실하게 지웠는지 확인했습니다. 지우개는 얼룩지지 않을 것입니다.
"숟가락을 컵에 넣기' 작업에서 CoPa는 먼저 숟가락의 손잡이를 잡고 수직 아래로 향하고 컵을 향하도록 회전시킨 다음 마지막으로 컵에 삽입하여 CoPa가 할 수 있음을 증명했습니다. 작업을 완료하기 위해 객체가 충족해야 하는 공간적 기하학적 제약을 쉽게 이해합니다.
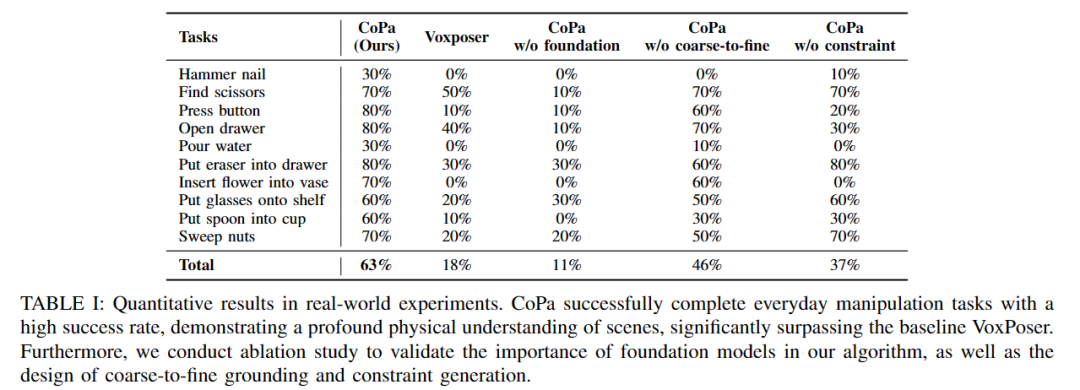
연구팀은 10가지 실제 작업에 대해 충분한 정량적 실험을 수행했습니다. 표 1에서 볼 수 있듯이 CoPa는 이러한 복잡한 작업에 대한 기본 방법뿐만 아니라 많은 절제 변형보다 훨씬 뛰어난 성능을 발휘합니다.
절제 실험
연구원들은 일련의 절제 실험을 통해 CoPa 프레임워크에서 기본 모델, 거친 부품 감지 및 공간 제한 생성이라는 세 가지 구성 요소의 중요성을 입증했습니다. 실험 결과를 위의 표 1에 나타내었다.
기본 모델
표의 기초 절제 실험이 없는 CoPa는 CoPa에서 기본 모델의 사용을 제거하고 대신 감지 모델을 사용하여 물체를 찾고 규칙 기반 방법을 사용하여 공간 제약 조건을 생성합니다. 실험 결과에 따르면 이 절제 변형의 성공률은 매우 낮으며 이는 CoPa의 기본 모델에 포함된 풍부한 상식 지식의 중요한 역할을 입증합니다. 예를 들어, "Sweeping Nuts" 작업에서 절제 변형은 장면의 어떤 도구가 청소에 적합한지 알 수 없습니다.
거친 부분부터 미세한 부분까지 감지
표의 CoPa w/o 거친 부분부터 미세한 부분까지 제거 실험은 CoPa 거친 부분부터 미세한 부분까지 감지 설계를 제거하고 대신 세밀한 분할을 직접 사용하여 개체를 찾습니다. 이 변형은 객체의 중요한 부분을 찾는 상대적으로 어려운 작업에서 성능을 크게 저하시킵니다. 예를 들어, "망치 못" 작업에서는 "거친 것부터 미세한 것까지" 디자인이 부족하여 망치 표면을 식별하기가 어렵습니다.
공간 제약 생성
표의 CoPa w/o 제약 절제 실험은 CoPa의 공간 제약 생성 모듈을 제거하고 대신 대형 시각적 언어 모델에서 로봇의 특정 값을 직접 출력할 수 있도록 합니다. 타겟 포즈. 실험을 통해 현장 사진을 기반으로 로봇 타겟 포즈를 직접 출력하는 것은 매우 어렵다는 것을 보여줍니다. 예를 들어, "물 붓기" 작업에서는 주전자를 특정 각도로 기울여야 하는데 이 변형은 현재 로봇의 자세를 전혀 생성할 수 없습니다.
자세한 내용은 원문을 참고해주세요.
위 내용은 명령 하나만으로 커피를 만들고, 레드와인을 붓고, 못을 박는 등의 작업이 가능한 칭화의 스마트 코파가 출시됐다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7476
7476
 15
1377
52
77
11
49
19
19
32
15
1377
52
77
11
49
19
19
32

 딥마인드 로봇이 탁구를 치는데 포핸드와 백핸드가 공중으로 미끄러져 인간 초보자를 완전히 제압했다.
Aug 09, 2024 pm 04:01 PM
딥마인드 로봇이 탁구를 치는데 포핸드와 백핸드가 공중으로 미끄러져 인간 초보자를 완전히 제압했다.
Aug 09, 2024 pm 04:01 PM
하지만 공원에 있는 노인을 이길 수는 없을까요? 파리올림픽이 본격화되면서 탁구가 많은 주목을 받고 있다. 동시에 로봇은 탁구 경기에서도 새로운 돌파구를 마련했습니다. 방금 DeepMind는 탁구 경기에서 인간 아마추어 선수 수준에 도달할 수 있는 최초의 학습 로봇 에이전트를 제안했습니다. 논문 주소: https://arxiv.org/pdf/2408.03906 DeepMind 로봇은 탁구를 얼마나 잘 치나요? 아마도 인간 아마추어 선수들과 동등할 것입니다: 포핸드와 백핸드 모두: 상대는 다양한 플레이 스타일을 사용하고 로봇도 견딜 수 있습니다: 다양한 스핀으로 서브를 받습니다. 그러나 게임의 강도는 그만큼 강렬하지 않은 것 같습니다. 공원에 있는 노인. 로봇용, 탁구용
 최초의 기계식 발톱! Yuanluobao는 2024년 세계 로봇 회의에 등장하여 집에 들어갈 수 있는 최초의 체스 로봇을 출시했습니다.
Aug 21, 2024 pm 07:33 PM
최초의 기계식 발톱! Yuanluobao는 2024년 세계 로봇 회의에 등장하여 집에 들어갈 수 있는 최초의 체스 로봇을 출시했습니다.
Aug 21, 2024 pm 07:33 PM
8월 21일, 2024년 세계로봇대회가 베이징에서 성대하게 개최되었습니다. SenseTime의 홈 로봇 브랜드 "Yuanluobot SenseRobot"은 전체 제품군을 공개했으며, 최근에는 Yuanluobot AI 체스 두는 로봇인 체스 프로페셔널 에디션(이하 "Yuanluobot SenseRobot")을 출시하여 세계 최초의 A 체스 로봇이 되었습니다. 집. Yuanluobo의 세 번째 체스 게임 로봇 제품인 새로운 Guoxiang 로봇은 AI 및 엔지니어링 기계 분야에서 수많은 특별한 기술 업그레이드와 혁신을 거쳤으며 처음으로 3차원 체스 말을 집는 능력을 실현했습니다. 가정용 로봇의 기계 발톱을 통해 체스 게임, 모두 체스 게임, 기보 복습 등과 같은 인간-기계 기능을 수행합니다.
 클로드도 게으르게 됐어요! 네티즌 : 휴가를 보내는 법을 배우십시오
Sep 02, 2024 pm 01:56 PM
클로드도 게으르게 됐어요! 네티즌 : 휴가를 보내는 법을 배우십시오
Sep 02, 2024 pm 01:56 PM
개학이 코앞으로 다가왔습니다. 새 학기를 앞둔 학생들뿐만 아니라 대형 AI 모델도 스스로 관리해야 합니다. 얼마 전 레딧에는 클로드가 게으르다고 불평하는 네티즌들이 붐볐습니다. "레벨이 많이 떨어졌고, 자주 멈췄고, 심지어 출력도 매우 짧아졌습니다. 출시 첫 주에는 4페이지 전체 문서를 한 번에 번역할 수 있었지만 지금은 반 페이지도 출력하지 못합니다. !" https://www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/ "클로드에게 완전히 실망했습니다"라는 제목의 게시물에
 세계로봇컨퍼런스에서 '미래 노인돌봄의 희망'을 담은 국산 로봇이 포위됐다.
Aug 22, 2024 pm 10:35 PM
세계로봇컨퍼런스에서 '미래 노인돌봄의 희망'을 담은 국산 로봇이 포위됐다.
Aug 22, 2024 pm 10:35 PM
베이징에서 열린 세계로봇컨퍼런스에서는 휴머노이드 로봇의 전시가 현장의 절대 화두가 됐다. 스타더스트 인텔리전트 부스에서는 AI 로봇 어시스턴트 S1이 덜시머, 무술, 서예 3대 퍼포먼스를 선보였다. 문학과 무술을 모두 갖춘 하나의 전시 공간은 수많은 전문 관객과 미디어를 끌어 모았습니다. 탄력 있는 현의 우아한 연주를 통해 S1은 정밀한 작동과 속도, 힘, 정밀성을 갖춘 절대적인 제어력을 보여줍니다. CCTV 뉴스는 '서예'의 모방 학습 및 지능형 제어에 대한 특별 보도를 진행했습니다. 회사 설립자 Lai Jie는 부드러운 움직임 뒤에 하드웨어 측면이 최고의 힘 제어와 가장 인간과 유사한 신체 지표(속도, 하중)를 추구한다고 설명했습니다. 등)이지만 AI측에서는 사람의 실제 움직임 데이터를 수집해 로봇이 강한 상황에 직면했을 때 더욱 강해지고 빠르게 진화하는 방법을 학습할 수 있다. 그리고 민첩하다
 ACL 2024 시상식 발표: HuaTech의 Oracle 해독에 관한 최고의 논문 중 하나, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
ACL 2024 시상식 발표: HuaTech의 Oracle 해독에 관한 최고의 논문 중 하나, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
참가자들은 이번 ACL 컨퍼런스에서 많은 것을 얻었습니다. ACL2024는 6일간 태국 방콕에서 개최됩니다. ACL은 전산언어학 및 자연어 처리 분야 최고의 국제학술대회로 국제전산언어학회(International Association for Computational Linguistics)가 주최하고 매년 개최된다. ACL은 NLP 분야에서 학술 영향력 1위를 항상 차지하고 있으며, CCF-A 추천 컨퍼런스이기도 합니다. 올해로 62회째를 맞이하는 ACL 컨퍼런스에는 NLP 분야의 최신 저서가 400편 이상 접수됐다. 어제 오후 컨퍼런스에서는 최우수 논문과 기타 상을 발표했습니다. 이번에 최우수논문상 7개(미출판 2개), 우수주제상 1개, 우수논문상 35개가 있다. 이 컨퍼런스에서는 또한 3개의 리소스 논문상(ResourceAward)과 사회적 영향상(Social Impact Award)을 수상했습니다.
 홍멍 스마트 트래블 S9과 풀시나리오 신제품 출시 컨퍼런스, 다수의 블록버스터 신제품이 함께 출시됐다
Aug 08, 2024 am 07:02 AM
홍멍 스마트 트래블 S9과 풀시나리오 신제품 출시 컨퍼런스, 다수의 블록버스터 신제품이 함께 출시됐다
Aug 08, 2024 am 07:02 AM
오늘 오후 Hongmeng Zhixing은 공식적으로 새로운 브랜드와 신차를 환영했습니다. 8월 6일, Huawei는 Hongmeng Smart Xingxing S9 및 Huawei 전체 시나리오 신제품 출시 컨퍼런스를 개최하여 파노라마식 스마트 플래그십 세단 Xiangjie S9, 새로운 M7Pro 및 Huawei novaFlip, MatePad Pro 12.2인치, 새로운 MatePad Air, Huawei Bisheng을 선보였습니다. 레이저 프린터 X1 시리즈, FreeBuds6i, WATCHFIT3 및 스마트 스크린 S5Pro를 포함한 다양한 새로운 올-시나리오 스마트 제품, 스마트 여행, 스마트 오피스, 스마트 웨어에 이르기까지 화웨이는 풀 시나리오 스마트 생태계를 지속적으로 구축하여 소비자에게 스마트한 경험을 제공합니다. 만물인터넷. Hongmeng Zhixing: 스마트 자동차 산업의 업그레이드를 촉진하기 위한 심층적인 권한 부여 화웨이는 중국 자동차 산업 파트너와 손을 잡고
 Li Feifei 팀은 로봇에 공간 지능을 제공하고 GPT-4o를 통합하기 위해 ReKep을 제안했습니다.
Sep 03, 2024 pm 05:18 PM
Li Feifei 팀은 로봇에 공간 지능을 제공하고 GPT-4o를 통합하기 위해 ReKep을 제안했습니다.
Sep 03, 2024 pm 05:18 PM
비전과 로봇 학습의 긴밀한 통합. 최근 화제를 모으고 있는 1X 휴머노이드 로봇 네오(NEO)와 두 개의 로봇 손이 원활하게 협력해 옷 개기, 차 따르기, 신발 싸기 등을 하는 모습을 보면 마치 로봇 시대로 접어들고 있다는 느낌을 받을 수 있다. 실제로 이러한 부드러운 움직임은 첨단 로봇 기술 + 정교한 프레임 디자인 + 다중 모드 대형 모델의 산물입니다. 우리는 유용한 로봇이 종종 환경과 복잡하고 절묘한 상호작용을 요구한다는 것을 알고 있으며, 환경은 공간적, 시간적 영역에서 제약으로 표현될 수 있습니다. 예를 들어, 로봇이 차를 따르도록 하려면 먼저 로봇이 찻주전자 손잡이를 잡고 차를 흘리지 않고 똑바로 세운 다음, 주전자 입구와 컵 입구가 일치할 때까지 부드럽게 움직여야 합니다. 을 누른 다음 주전자를 특정 각도로 기울입니다. 이것
 AI 사용 | Microsoft 사장의 미친 Amway AI 게임이 나를 수천 번 고문했습니다.
Aug 14, 2024 am 12:00 AM
AI 사용 | Microsoft 사장의 미친 Amway AI 게임이 나를 수천 번 고문했습니다.
Aug 14, 2024 am 12:00 AM
Machine Power Report 편집자: Yang Wen 대형 모델과 AIGC로 대표되는 인공지능의 물결은 우리가 살고 일하는 방식을 조용히 변화시키고 있지만, 대부분의 사람들은 여전히 그것을 어떻게 사용하는지 모릅니다. 이에 직관적이고 흥미롭고 간결한 인공지능 활용 사례를 통해 AI 활용 방법을 자세히 소개하고 모두의 사고를 자극하고자 'AI in Use' 칼럼을 론칭하게 됐다. 또한 독자들이 혁신적인 실제 사용 사례를 제출하는 것을 환영합니다. 맙소사 AI가 정말 천재가 되었네요. 최근에는 AI가 생성한 사진의 진위 판별이 어렵다는 점이 화제가 되고 있다. (자세한 내용은 AI 사용 | 3단계로 AI 미녀 되기, 1초 만에 AI에 의해 원래 모습으로 돌아가기 참조) 인터넷에서 인기 있는 AI Google lady 외에도 다양한 FLUX 생성기가 있습니다. 소셜 플랫폼에 등장
