

효율성이 16배 증가했습니다! VRSO: 순수한 시각적 정적 객체의 3D 주석으로 데이터 폐쇄 루프를 엽니다!

주석
신호등, 안내 표지판, 신호등을 포함한 정적 객체 감지(SOD)의 경우 대부분의 알고리즘은 데이터 기반 심층 신경망이며 많은 양의 훈련 데이터가 필요합니다. 현재 관행에는 일반적으로 롱테일 사례를 수정하기 위해 LiDAR 스캔 포인트 클라우드 데이터에 대한 다수의 훈련 샘플에 대한 수동 주석이 포함됩니다.
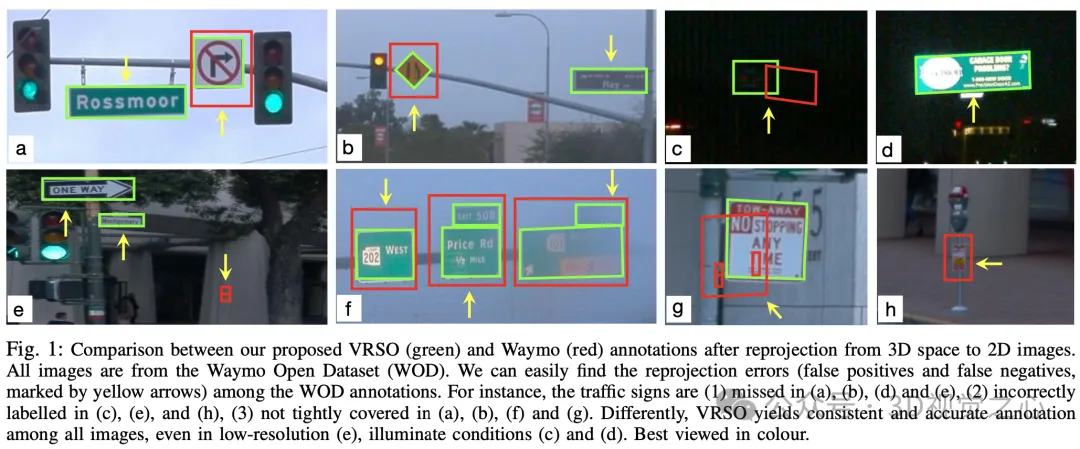
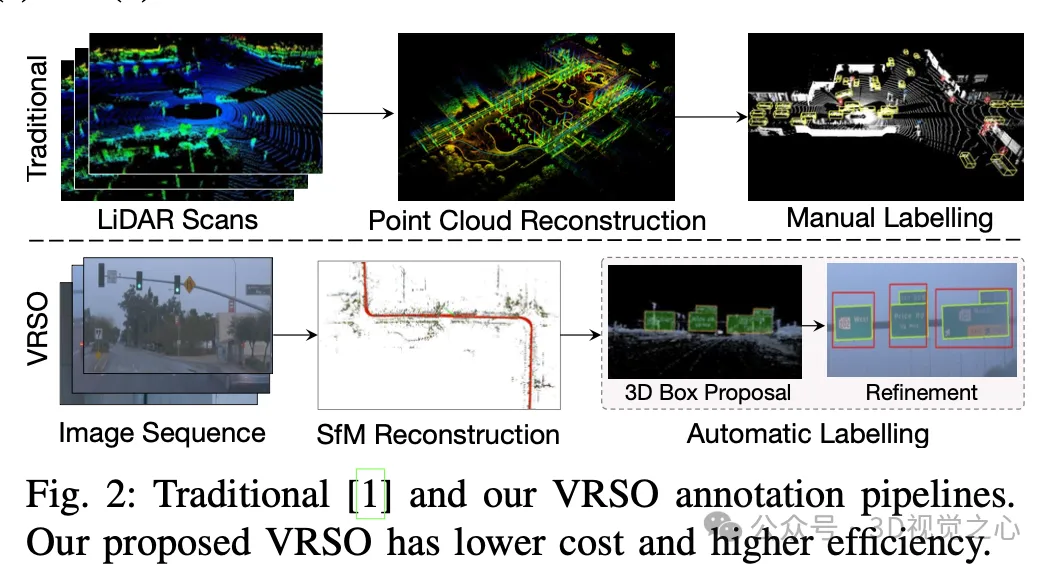
수동 주석은 실제 장면의 가변성과 복잡성을 포착하기 어렵고 종종 폐색, 다양한 조명 조건 및 다양한 시야각을 고려하지 못합니다(그림 1의 노란색 화살표). 전체 프로세스는 긴 링크로 구성되어 있으며 시간이 많이 걸리고 오류가 발생하기 쉬우며 비용이 많이 듭니다(그림 2). 그래서 현재 기업들은 특히 순수한 비전을 기반으로 한 자동 라벨링 솔루션을 찾고 있습니다. 결국 모든 자동차에 LiDAR가 있는 것은 아닙니다.
VRSO+는 주로 SFM, 2D 객체 감지 및 인스턴스 분할 결과의 정보를 사용하는 비전 기반 주석 시스템입니다.
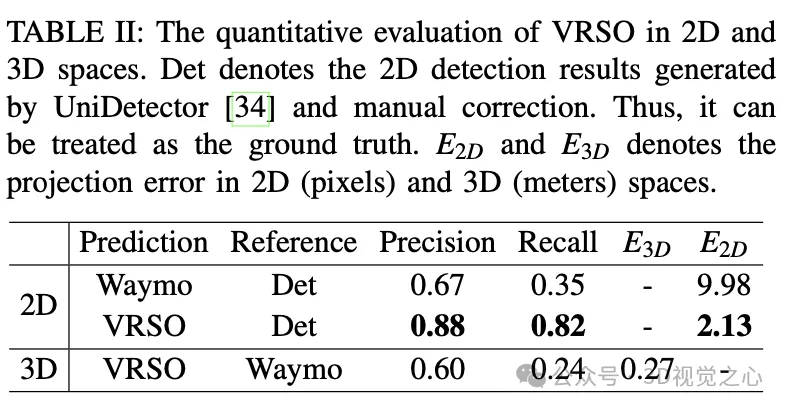
- 주석의 평균 투영 오류는 다음과 같습니다. 2.6픽셀로 Waymo 주석(10.6픽셀)의 4분의 1 정도입니다.
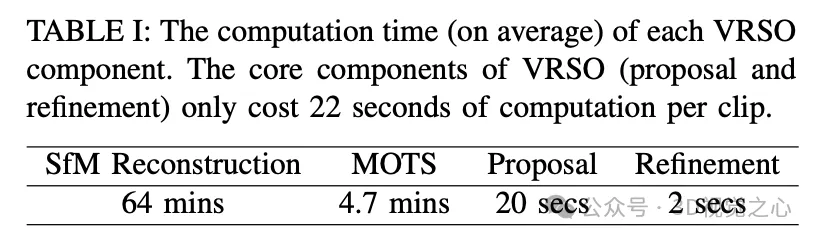
- 수동 주석에 비해 속도가 약 16배 향상됩니다.
정적 객체의 경우 VRSO는 인스턴스 분할을 통해 핵심 포인트를 추출하고 윤곽선 다양한 관점에서 정적 객체를 통합하고 중복 제거해야 하는 과제와 폐색 문제로 인한 관찰 부족으로 인해 주석 정확도가 향상됩니다. 그림 1에서 Waymo Open 데이터 세트의 수동 주석 결과와 비교하여 VRSO는 더 높은 견고성과 기하학적 정확도를 보여줍니다.
(모두 보셨을 텐데요. 엄지 손가락으로 위로 스와이프하고 상단에 있는 카드를 클릭하여 저를 팔로우해 보세요. 전체 작업은 1.328초만 소요되며, 그 다음에는 모든 유용한 정보를 가져옵니다. 미래에 유용할 경우를 대비해~)
문제 해결
VRSO 시스템은 크게 장면 재구성과 정적 객체 주석 두 부분으로 나뉩니다.
재구성 부분은 초점이 아닌 SFM 알고리즘을 기반으로 이미지 포즈와 희박한 3D 키 포인트를 복원합니다.
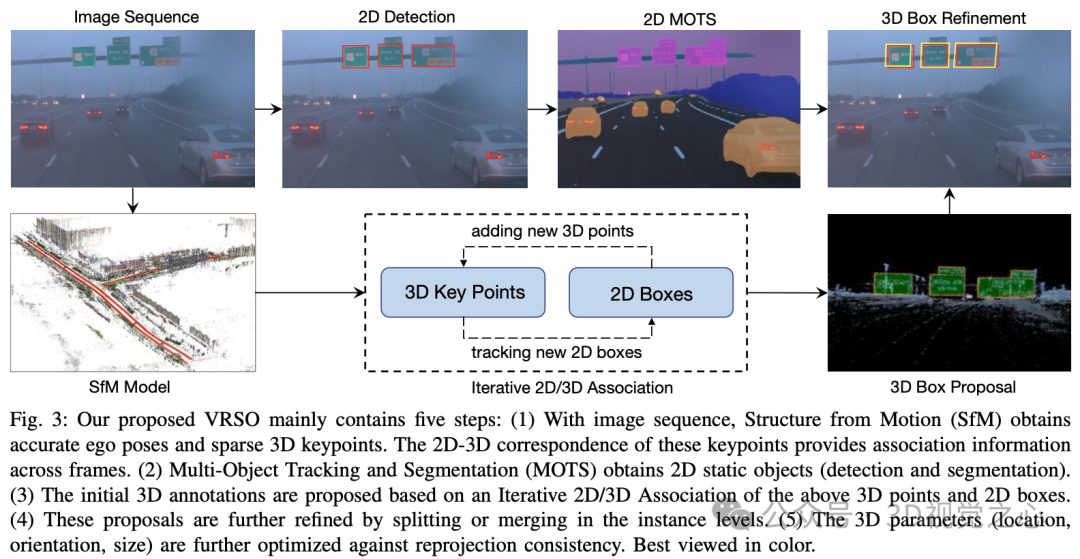
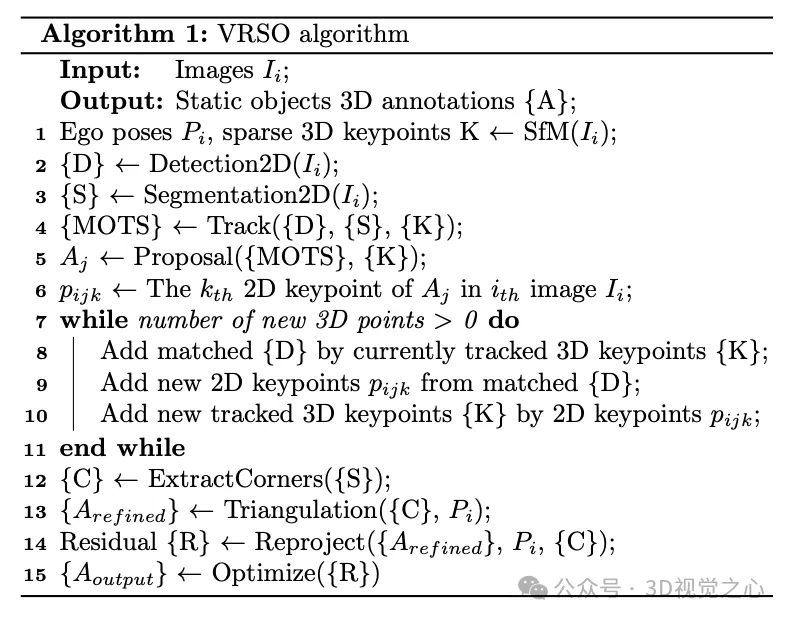
의사 코드와 결합된 정적 개체 주석 알고리즘의 일반적인 프로세스는 다음과 같습니다(다음은 단계별로 자세히 설명됩니다).
- 기성 2D 개체 감지 및 분할 알고리즘을 사용하여 후보 생성
- 3D-2D 사용 SFM 모델의 핵심 대응 관계를 통해 프레임 전반에 걸쳐 2D 인스턴스를 추적합니다.
- 재투영 일관성을 도입하여 정적 객체의 3D 주석 매개변수를 최적화합니다.
1. 관계 추적
- 1단계: 다음을 기반으로 3D 경계 추출 SFM 모델의 핵심 포인트는 상자 내 3D 포인트입니다.
- 2단계: 2D-3D 매칭 관계를 기반으로 2D 지도에서 각 3D 지점의 좌표를 계산합니다.
- 3단계: 2D 지도 좌표와 인스턴스 분할 모서리 지점을 기반으로 현재 2D 지도에서 해당 3D 지점의 인스턴스를 결정합니다.
- 4단계: 각 2D 이미지에 대한 2D 관찰과 3D 경계 상자 간의 대응 관계를 결정합니다.
2.proposal은
을 생성하여 전체 비디오 클립에 대한 정적 개체의 3D 상자 매개변수(위치, 방향, 크기)를 초기화합니다. SFM의 각 핵심 포인트에는 정확한 3D 위치와 해당 2D 이미지가 있습니다. 각 2D 인스턴스에 대해 2D 인스턴스 마스크 내의 특징점이 추출됩니다. 그런 다음 해당 3D 키포인트 집합을 3D 경계 상자의 후보로 간주할 수 있습니다.
거리 표지판은 이동(,,), 방향(θ) 및 크기(너비 및 높이)를 포함하여 6자유도를 갖는 공간 방향의 직사각형으로 표현됩니다. 깊이를 고려하면 신호등의 자유도는 7도입니다. 신호등은 신호등과 유사하게 표시됩니다.
3.proposalfine
- 1단계: 2D 인스턴스 분할에서 각 정적 개체의 윤곽선을 추출합니다.
- 2단계: 윤곽선에 최소 방향 경계 상자(OBB)를 맞춥니다.
- 3단계: 최소 경계 상자의 정점을 추출합니다.
- 4단계: 정점과 중심점을 기준으로 방향을 계산하고 정점 순서를 결정합니다.
- 5단계: 2D 감지 및 인스턴스 분할 결과를 기반으로 분할 및 병합 프로세스가 수행됩니다.
- 6단계: 폐색이 포함된 관찰을 감지하고 거부합니다. 2D 인스턴스 분할 마스크에서 정점을 추출하려면 각 기호의 네 모서리가 모두 표시되어야 합니다. 폐색이 있는 경우 인스턴스 분할에서 AABB(축 정렬 경계 상자)를 추출하고 AABB와 2D 감지 상자 간의 면적 비율을 계산합니다. 폐색이 없는 경우 이 두 가지 면적 계산 방법은 유사해야 합니다.

4. 삼각측량
삼각측량을 통해 3차원 조건에서 정적 객체의 초기 정점값을 구합니다.
장면 재구성 중 SFM 및 인스턴스 분할을 통해 얻은 3D 경계 상자의 키포인트 수를 확인하여 키포인트 수가 임계값을 초과하는 인스턴스만 안정적이고 유효한 관찰로 간주됩니다. 이러한 경우 해당 2D 경계 상자는 유효한 관찰로 간주됩니다. 여러 이미지의 2차원 관찰을 통해 2차원 경계 상자의 꼭지점을 삼각측량하여 경계 상자의 좌표를 얻습니다.
마스크의 "왼쪽 아래, 왼쪽 위, 오른쪽 위, 오른쪽 위, 오른쪽 아래" 정점을 구분하지 않는 원형 기호의 경우 이러한 원형 기호를 식별해야 합니다. 2D 검출 결과는 원형 객체의 관찰로 사용되며, 2D 인스턴스 분할 마스크는 윤곽선 추출에 사용됩니다. 중심점과 반경은 최소 제곱 피팅 알고리즘을 통해 계산됩니다. 원형 기호의 매개변수에는 중심점(,,), 방향(θ), 반경()이 포함됩니다.
5. 추적 개선
SFM 기반의 추적 특징점 매칭. 3D 경계 상자 정점의 유클리드 거리와 2D 경계 상자 투영 IoU를 기반으로 이러한 개별 인스턴스를 병합할지 여부를 결정합니다. 병합이 완료되면 인스턴스 내의 3D 특징점을 클러스터링하여 더 많은 2D 특징점을 연결할 수 있습니다. 2D 특징점을 추가할 수 없을 때까지 반복적인 2D-3D 연관이 수행됩니다.
6. 최종 매개변수 최적화
직사각형 기호를 예로 들면, 최적화할 수 있는 매개변수는 위치(,,), 방향(θ), 크기(,)이며 총 6도입니다. 자유의. 주요 단계는 다음과 같습니다.
- 6개의 자유도를 4개의 3D 점으로 변환하고 회전 행렬을 계산합니다.
- 변환된 4개의 3D 포인트를 2D 이미지에 투사합니다.
- 투영 결과와 인스턴스 분할로 얻은 꼭지점 결과 간의 잔차를 계산합니다.
- Huber를 사용하여 최적화 및 경계 상자 매개변수 업데이트
주석 효과
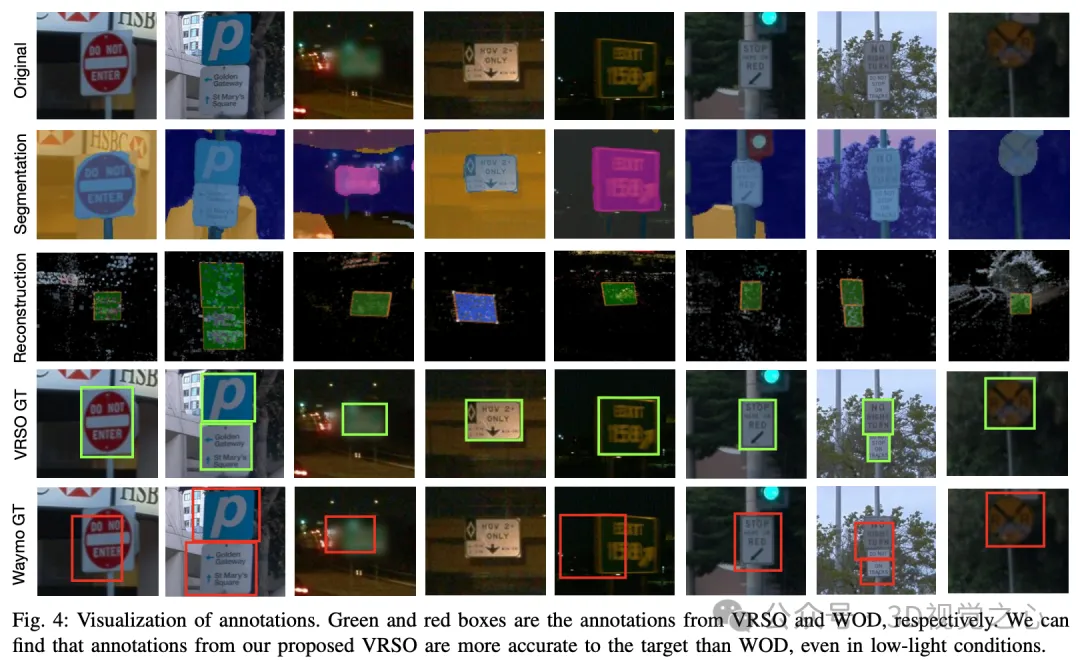
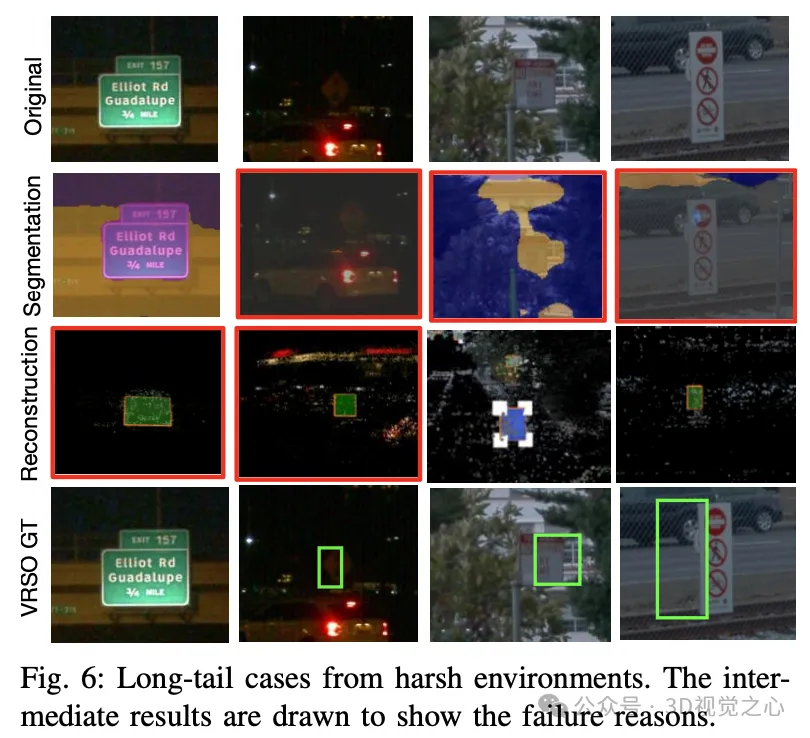
매우 낮은 해상도 및 조명 부족과 같은 까다로운 롱테일 사례도 있습니다.
요약하자면
VRSO 프레임워크는 고정밀 객체에 대해 일관된 3D 주석을 달성하고 감지, 분할 및 SFM 알고리즘을 긴밀하게 통합하고 지능형 운전 주석에서 수동 개입을 제거하며 비교할 수 있는 LiDAR 기반 결과를 제공합니다. 수동 주석으로. 널리 알려진 Waymo Open Dataset을 사용하여 정성적, 정량적 평가를 수행했습니다. 수동 주석에 비해 속도는 약 16배 향상되었으며 최고의 일관성과 정확성을 유지했습니다.
위 내용은 효율성이 16배 증가했습니다! VRSO: 순수한 시각적 정적 객체의 3D 주석으로 데이터 폐쇄 루프를 엽니다!의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)
뜨거운 주제
 7547
7547
 15
1382
52
83
11
57
19
22
90
15
1382
52
83
11
57
19
22
90

 헌팅 슈트 디자인, 새로운 스마트 럭셔리 플래그십 세단: DENZA Z9GT 실사
Apr 22, 2024 pm 02:10 PM
헌팅 슈트 디자인, 새로운 스마트 럭셔리 플래그십 세단: DENZA Z9GT 실사
Apr 22, 2024 pm 02:10 PM
4월 22일자 뉴스에 따르면 오늘 아침 Denza의 새로운 플래그십 모델인 Z9GT가 데뷔했습니다. 공식 소개에 따르면 신차는 전장 5180mm로 D클래스 럭셔리 세단 수준에 도달해 스마트 럭셔리 플래그십 세단으로 자리매김했다. 거의 천 마력을 갖춘 "e³" 블랙 기술, 다중 LiDAR 및 기타 구성을 갖추고 있습니다. 디자인 측면에서 Denza Z9GT는 동양과 서양의 미학을 완벽하게 혼합하여 시선을 사로잡는 전면 디자인을 자랑합니다. 차체 측면에는 "Z"자 모양의 장식 라인이 정교하고 매끄럽고 차체의 무게 중심이 상대적으로 뒤로 젖혀져 뒤로 기울어지는 자세가 매우 스포티합니다. 차량 후면은 둥글고 꽉 차 있으며, 미등은 중앙에서 양쪽으로 뻗어 있어 전동식 테일 윙을 반영해 차량 전체에 대한 높은 인지도를 가져옵니다. 가치
 탱크 300Hi4-T가 강력한 데뷔를 합니다: 오프로드와 지능의 완벽한 조합
Apr 23, 2024 pm 06:16 PM
탱크 300Hi4-T가 강력한 데뷔를 합니다: 오프로드와 지능의 완벽한 조합
Apr 23, 2024 pm 06:16 PM
4월 23일 뉴스에 따르면 최근 많은 기대를 모았던 Great Wall Tank 300Hi4-T가 마침내 공식적으로 시장에 출시되었습니다. 이 모델은 독특한 구성과 한정된 희소성으로 인해 많은 주목을 받았습니다. 이번에는 Tank 300Hi4-T의 한 가지 구성만 출시되었으며 권장 소매가는 269,800위안이며 판매 가능한 수량은 3,000대만인 것으로 알려졌습니다. 외관 디자인 측면에서 탱크 300Hi4-T는 강렬한 오프로드 분위기를 보여준다. 하중을 지지하지 않는 차체를 갖춘 전문적인 오프로드 섀시를 채택하여 차량의 안정성과 오프로드 성능이 향상되었음을 보여줍니다. 차량 전면부에는 아이코닉한 원형 라이트 세트가 3프레임 수평 그릴을 보완하고, 실버 크롬 도금 전면 그릴이 차량을 더욱 강인하고 강력해 보이게 합니다. 차체와 동일한 색상의 휠 아치와 외부 미러가 이 차의 품격을 더욱 돋보이게 합니다.
 Xiangjie S9가 베이징 오토쇼에서 첫 선을 보이고, Huawei와 BAIC Blue Valley의 첫 번째 순수 전기 세단이 곧 데뷔할 예정입니다.
Apr 23, 2024 pm 01:13 PM
Xiangjie S9가 베이징 오토쇼에서 첫 선을 보이고, Huawei와 BAIC Blue Valley의 첫 번째 순수 전기 세단이 곧 데뷔할 예정입니다.
Apr 23, 2024 pm 01:13 PM
4월 23일 최신 보도에 따르면, 많은 기대를 모았던 순수 전기 세단 엔조이 S9이 다가오는 베이징 오토쇼에서 대중을 처음으로 만날 예정이다. 이 자동차는 BAIC Blue Valley와 Huawei가 업계 거대 기업을 위해 공동으로 만든 걸작으로 중대형 세단 시장에 자리잡고 있으며 50만 위안 이상에 판매될 것으로 예상됩니다. S9은 최근 산업정보기술부와 관련 신청 절차를 완료해 정식 출시를 앞두고 있음을 알렸다. 공개된 정보에 따르면 신차는 헤드라이트 그룹에 3세트의 광원이 섬세하게 분산된 현대적인 관통형 LED 조명 그룹을 사용하여 눈에 띄는 외관 디자인을 갖추고 있습니다. 닫힌 전면 그릴과 시선을 사로잡는 전면 서라운드 방열 벤트 디자인이 함께 안정적이면서도 패셔너블한 분위기를 연출합니다. 데이터 에디터는 S9 차체의 우아한 측면 라인을 이해하고 즐깁니다.
 차세대 Great Wall Haval H6 및 H9가 2024년 베이징 오토쇼에서 공개될 예정입니다.
Apr 25, 2024 pm 07:07 PM
차세대 Great Wall Haval H6 및 H9가 2024년 베이징 오토쇼에서 공개될 예정입니다.
Apr 25, 2024 pm 07:07 PM
2024년 4월 25일, Great Wall Haval은 차세대 Haval H6, 차세대 Haval H9, 2024 Haval Raptor 및 기타 스타 모델과 함께 제18회 베이징 국제 자동차 전시회에서 성대하게 모습을 드러냈습니다. China Haval은 전 세계의 신뢰를 받고 있으며 Haval 브랜드는 글로벌 시장 추구에 박차를 가하고 있습니다. 이번 모터쇼에서 Great Wall Haval은 "세계가 신뢰하는 중국 Haval"을 주제로 삼아 Haval 브랜드의 탄탄함을 충분히 설명합니다. '글로벌 SUV 전문가'로서 사용자를 향한 약속. Great Wall Haval은 기술 혁신을 통해 13년 동안 SUV 분야에 깊이 관여해 왔으며 하드 코어 제품 기능과 신뢰할 수 있는 서비스를 사용하여 소비자에게 고품질 SUV 제품을 제공했습니다. 중국을 선도하는 것에서 세계로 나아가는 것까지, Great Wall Haval은 계속해서 뛰어난 SUV 제품 경험을 창조하고, 더 많은 사용자의 기대와 신뢰에 부응하며, 중국 브랜드의 세계화를 써 나가고 있습니다.
 옥스포드 대학의 최신 소식! 미키: 3D SOTA로 2D 이미지 매칭! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
옥스포드 대학의 최신 소식! 미키: 3D SOTA로 2D 이미지 매칭! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
앞에 적힌 프로젝트 링크: https://nianticlabs.github.io/mickey/ 두 장의 사진이 주어지면 사진 간의 대응 관계를 설정하여 두 장의 사진 사이의 카메라 포즈를 추정할 수 있습니다. 일반적으로 이러한 대응은 2D에서 2D로 이루어지며 추정된 포즈는 규모에 따라 결정되지 않습니다. 언제 어디서나 즉각적인 증강 현실과 같은 일부 애플리케이션은 규모 측정항목의 포즈 추정이 필요하므로 규모를 복구하기 위해 외부 깊이 추정기에 의존합니다. 본 논문에서는 3차원 카메라 공간에서 메트릭 일치성을 예측할 수 있는 키포인트 매칭 프로세스인 MicKey를 제안합니다. 이미지 전반에 걸쳐 3D 좌표 매칭을 학습함으로써 측정 기준을 추론할 수 있습니다.
 사진에 없는 도시의 NOA 지원, 만리장성 웨이 브랜드 블루마운틴 스마트 드라이빙 에디션, 6월 공식 출시 예정
May 09, 2024 pm 09:10 PM
사진에 없는 도시의 NOA 지원, 만리장성 웨이 브랜드 블루마운틴 스마트 드라이빙 에디션, 6월 공식 출시 예정
May 09, 2024 pm 09:10 PM
2024년 5월 9일 보도에 따르면, 올해 베이징국제오토쇼에서 만리장성자동차(Great Wall Motors)의 자회사 웨이브랜드(Wei Brand)가 새로운 모델인 블루마운틴 스마트 드라이빙 에디션(Blue Mountain Smart Driving Edition)을 출시해 많은 관람객들의 관심을 끌었다. '아는 차 황제의 비전'에 따르면 많은 기대를 모으고 있는 이 신차는 올해 6월 정식 출시될 예정이다. 블루마운틴 스마트 드라이빙 에디션의 디자인은 현재 판매 중인 블루마운틴 DHT-PHEV의 클래식한 모습을 이어가면서도 지능형 주행 인식 측면에서 대폭 업그레이드됐다. 가장 눈길을 끄는 점은 지붕에 감시탑형 라이더가 설치되는 것과 동시에 3밀리파 레이더와 12개의 초음파 레이더, 11개의 고화질 시각 인식 카메라도 탑재됐다는 점이다. 총 27개의 주행 보조 센서가 차량의 환경 인식 능력을 크게 향상시킵니다. ~에 따르면
 Denza Z9GT는 2024년 베이징 모터쇼에서 데뷔할 예정이며, 해외 가격은 100만 위안을 넘을 수도 있습니다.
Apr 25, 2024 pm 07:52 PM
Denza Z9GT는 2024년 베이징 모터쇼에서 데뷔할 예정이며, 해외 가격은 100만 위안을 넘을 수도 있습니다.
Apr 25, 2024 pm 07:52 PM
4월 25일, 2024년 제18회 베이징 국제 자동차 전시회가 공식적으로 개막했습니다. Denza Motors는 역사상 가장 강력한 스마트 럭셔리 제품 매트릭스로 W4 홀에 멋진 모습을 보여 사람들로 붐비며 가장 인기 있는 체크인 장소가 되었습니다. 이번 베이징 오토쇼를 주목해 보세요! 그 중 Denza Z9GT는 지능형 럭셔리 플래그십 세단으로 자리매김했으며, 이는 BYD 그룹의 디자인 디렉터인 볼프강 에거(Wolfgang Egger)의 또 다른 정점에 있는 작품이기도 합니다. 럭셔리 자동차 전동화의 새로운 트렌드를 선도하는 이산팡. Iger가 주도하고 파괴적인 기술을 적용한 Denza Z9GT는 올해 오토쇼의 초점입니다. Denza의 새로운 디자인 컨셉인 "Elegance in Motion"의 첫 번째 모델인 Denza Z9GT의 외관은 Iger가 주도하고 완벽하게 디자인되었습니다. .
 LLM이 모두 완료되었습니다! OmniDrive: 3D 인식 및 추론 계획 통합(NVIDIA 최신)
May 09, 2024 pm 04:55 PM
LLM이 모두 완료되었습니다! OmniDrive: 3D 인식 및 추론 계획 통합(NVIDIA 최신)
May 09, 2024 pm 04:55 PM
위에 작성됨 및 저자의 개인적 이해: 이 문서는 자율 주행 애플리케이션에서 현재 다중 모드 대형 언어 모델(MLLM)의 주요 과제를 해결하는 데 전념하고 있습니다. 이는 MLLM을 2D 이해에서 3D 공간으로 확장하는 문제입니다. 자율주행차(AV)가 3D 환경에 대해 정확한 결정을 내려야 하기 때문에 이러한 확장은 특히 중요합니다. 3D 공간 이해는 정보에 입각한 결정을 내리고 미래 상태를 예측하며 환경과 안전하게 상호 작용하는 차량의 능력에 직접적인 영향을 미치기 때문에 AV에 매우 중요합니다. 현재 다중 모드 대형 언어 모델(예: LLaVA-1.5)은 시각적 인코더의 해상도 제한, LLM 시퀀스 길이 제한으로 인해 저해상도 이미지 입력(예:)만 처리할 수 있는 경우가 많습니다. 하지만 자율주행 애플리케이션에는
