
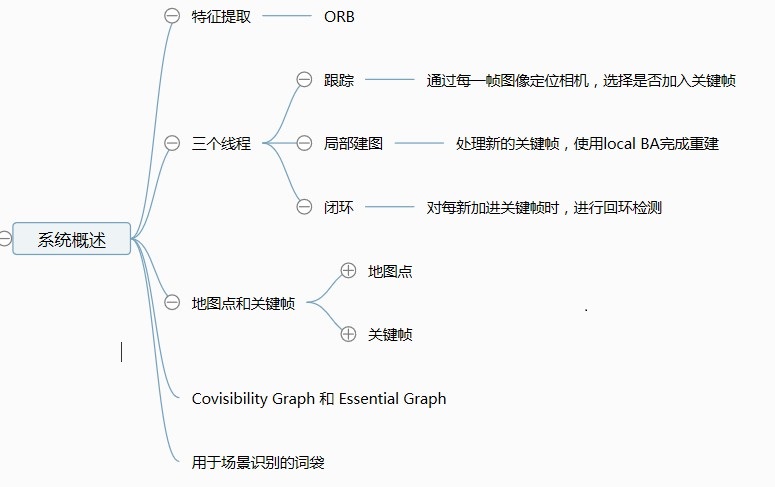
ORB-SLAM은 주로 Tracking, LocalMapping 및 LoopClosing의 세 가지 스레드로 나뉩니다
세 개의 스레드는 세 개의 해당 파일, 즉 Tracking.cpp, LocalMapping.cpp 및 LoopClosing.cpp 파일에 저장됩니다.
(1) 추적(Tracking)
이 부분의 주요 작업은 이미지에서 ORB 특징을 추출하고, 이전 프레임을 기반으로 포즈 추정을 수행하거나 전역 재배치를 통해 포즈를 초기화한 다음 재구성된 로컬 맵을 추적하고 포즈를 최적화한 다음 그에 따라 새로운 핵심 포인트를 결정하는 것입니다. 어떤 규칙에.
(2)매핑(LocalMapping)
이 부분은 주로 지역지도 구축을 완료합니다. 여기에는 키프레임 삽입, 최근 생성된 맵 포인트 확인 및 필터링, 새 맵 포인트 생성, 로컬 번들 조정(로컬 BA) 사용, 마지막으로 삽입된 키프레임 필터링을 통해 중복 키프레임 제거가 포함됩니다.
(3)폐쇄 루프 감지(LoopClosing)
이 부분은 주로 폐쇄 루프 감지와 폐쇄 루프 수정이라는 두 가지 프로세스로 나뉩니다. 폐루프 탐지는 먼저 WOB를 탐지에 사용한 후 Sim3 알고리즘을 통해 유사성 변환을 계산합니다. 폐쇄 루프 수정은 주로 Essential Graph의 폐쇄 루프 융합 및 그래프 최적화입니다.
위 내용은 ORB-SLAM2 초보자 노트의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



