

OmniDrive: 대형 모델을 3D 운전 작업에 맞추기 위한 프레임워크

희소 쿼리를 사용하여 시각적 표현을 3D로 리프트 및 압축한 다음 LLM에 공급하는 새로운 3D MLLM 아키텍처로 시작하세요.
제목: OmniDrive: 3D 인식 추론 및 계획을 통한 자율 주행을 위한 전체적인 LLM 에이전트 프레임워크
저자 소속: Beijing Institute of Technology, NVIDIA, Huazhong University of Science and Technology
오픈 소스 주소: GitHub - NVlabs/OmniDrive
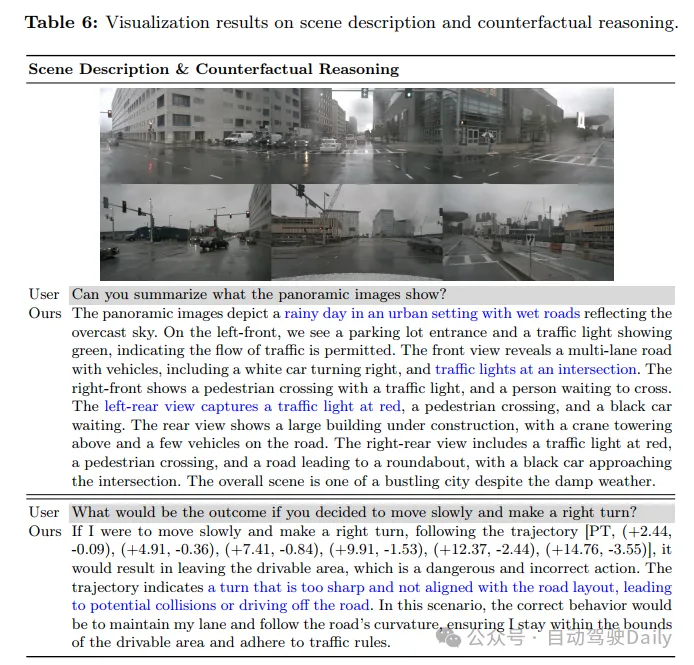
다양성 MLLM(대형 언어 모델)의 개발로 인해 강력한 추론 기능을 활용하는 LLM 기반 자율 주행에 대한 관심이 높아졌습니다. MLLM의 강력한 추론 기능을 활용하여 계획 행동을 개선하는 것은 2D 추론을 넘어 완전한 3D 상황 인식이 필요하기 때문에 어렵습니다. 이러한 과제를 해결하기 위해 이 연구에서는 에이전트 모델과 3D 운전 작업 간의 강력한 정렬을 위한 포괄적인 프레임워크인 OmniDrive를 제안합니다. 프레임워크는 희소 쿼리를 사용하여 관측 표현을 3D로 리프트 및 압축한 다음 LLM에 공급하는 새로운 3D+MLLM 아키텍처로 시작됩니다. 이 쿼리 기반 표현을 사용하면 동적 개체와 정적 지도 요소(예: 교통 도로)를 공동으로 인코딩하여 3D의 인식-동작 정렬을 위한 간결한 세계 모델을 제공할 수 있습니다. 또한 장면 설명, 교통 규칙, 3D 접지, 반사실적 추론, 의사 결정 및 계획을 포함한 포괄적인 시각적 질문 응답(VQA) 작업을 포함하는 새로운 벤치마크를 제안합니다. 광범위한 연구를 통해 복잡한 3D 장면에서 OmniDrive의 뛰어난 추론 및 계획 기능이 입증되었습니다.
네트워크 구조


실험 결과




위 내용은 OmniDrive: 대형 모델을 3D 운전 작업에 맞추기 위한 프레임워크의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)



 GIT 프로젝트를 로컬로 다운로드하는 방법
Apr 17, 2025 pm 04:36 PM
GIT 프로젝트를 로컬로 다운로드하는 방법
Apr 17, 2025 pm 04:36 PM
GIT를 통해 로컬로 프로젝트를 다운로드하려면 다음 단계를 따르십시오. GIT를 설치하십시오. 프로젝트 디렉토리로 이동하십시오. 다음 명령을 사용하여 원격 저장소 클로닝 : git 클론 https://github.com/username/repository-name.git
 git에서 코드를 업데이트하는 방법
Apr 17, 2025 pm 04:45 PM
git에서 코드를 업데이트하는 방법
Apr 17, 2025 pm 04:45 PM
GIT 코드를 업데이트하는 단계 : 코드 확인 : git 클론 https://github.com/username/repo.git 최신 변경 사항 가져 오기 : Git Fetch Merge 변경 사항 : GIT 병합 원산지/마스터 푸시 변경 (옵션) : Git Push Origin Master
 git에서 코드를 병합하는 방법
Apr 17, 2025 pm 04:39 PM
git에서 코드를 병합하는 방법
Apr 17, 2025 pm 04:39 PM
GIT 코드 병합 프로세스 : 충돌을 피하기 위해 최신 변경 사항을 가져옵니다. 병합하려는 지점으로 전환하십시오. 병합을 시작하고 병합을 지정합니다. 병합 충돌을 해결하십시오 (있는 경우). 커밋 메시지를 제공하여 병합을 준비하고 커밋합니다.
 GIT 다운로드가 활성화되지 않은 경우해야 할 일
Apr 17, 2025 pm 04:54 PM
GIT 다운로드가 활성화되지 않은 경우해야 할 일
Apr 17, 2025 pm 04:54 PM
해결 : GIT 다운로드 속도가 느리면 다음 단계를 수행 할 수 있습니다. 네트워크 연결을 확인하고 연결 방법을 전환하십시오. GIT 구성 최적화 : 포스트 버퍼 크기를 늘리고 (GIT 구성-글로벌 http.postBuffer 524288000) 저속 제한 (git config --global http.lowspeedlimit 1000)을 줄입니다. git 프록시 (예 : git-proxy 또는 git-lfs-proxy)를 사용하십시오. 다른 git 클라이언트 (예 : Sourcetree 또는 Github 데스크탑)를 사용해보십시오. 화재 보호를 확인하십시오
 PHP 프로젝트에서 효율적인 검색 문제를 해결하는 방법은 무엇입니까? Typesense는이를 달성하는 데 도움이됩니다!
Apr 17, 2025 pm 08:15 PM
PHP 프로젝트에서 효율적인 검색 문제를 해결하는 방법은 무엇입니까? Typesense는이를 달성하는 데 도움이됩니다!
Apr 17, 2025 pm 08:15 PM
전자 상거래 웹 사이트를 개발할 때 어려운 문제가 발생했습니다. 대량의 제품 데이터에서 효율적인 검색 기능을 달성하는 방법은 무엇입니까? 기존 데이터베이스 검색은 비효율적이며 사용자 경험이 좋지 않습니다. 일부 연구 후, 나는 검색 엔진 타입을 발견하고 공식 PHP 클라이언트 Typeense/Typeense-PHP를 통해이 문제를 해결하여 검색 성능을 크게 향상 시켰습니다.
 Git Commit을 사용하는 방법
Apr 17, 2025 pm 03:57 PM
Git Commit을 사용하는 방법
Apr 17, 2025 pm 03:57 PM
Git Commit은 프로젝트의 현재 상태에 대한 스냅 샷을 저장하기 위해 파일 변경을 GIT 저장소에 기록하는 명령입니다. 사용 방법은 다음과 같습니다. 임시 저장 영역에 변경 사항 추가 제출 메시지를 저장하고 종료하기 위해 간결하고 유익한 제출 메시지를 작성하여 제출을 완료하기 위해 제출물을 완료하십시오. 제출자에 서명을 추가하여 제출 내용을보기 위해 GIT 로그를 사용하십시오.
 Git에서 로컬 코드를 업데이트하는 방법
Apr 17, 2025 pm 04:48 PM
Git에서 로컬 코드를 업데이트하는 방법
Apr 17, 2025 pm 04:48 PM
로컬 git 코드를 업데이트하는 방법은 무엇입니까? Git Fetch를 사용하여 원격 저장소에서 최신 변경 사항을 가져옵니다. Git Merge Origin/& Lt; 원격 지점 이름 & gt; 합병으로 인해 발생하는 갈등을 해결합니다. git commit -m "merge branch & lt; 원격 브랜치 이름 & gt;" 병합 변경 사항을 제출하고 업데이트를 적용합니다.
 git로 저장소를 삭제하는 방법
Apr 17, 2025 pm 04:03 PM
git로 저장소를 삭제하는 방법
Apr 17, 2025 pm 04:03 PM
git 저장소를 삭제하려면 다음 단계를 따르십시오. 삭제하려는 저장소를 확인하십시오. 로컬 리포지토리 삭제 : rm -rf 명령을 사용하여 폴더를 삭제하십시오. 원격으로 창고 삭제 : 창고 설정으로 이동하고 "창고 삭제"옵션을 찾은 후 작동을 확인하십시오.
