

【理论】支持向量机2: Support Vector 介绍支持向量机目标

【原文:http://blog.pluskid.org/?p=682】 上一次介绍支持向量机,结果说到 Maximum Margin Classifier ,到最后都没有说“支持向量”到底是什么东西。不妨回忆一下上次最后一张图: 可以看到两个支撑着中间的 gap 的超平面,它们到中间的 separating hyper
【原文:http://blog.pluskid.org/?p=682】
上一次介绍支持向量机,结果说到 Maximum Margin Classifier ,到最后都没有说“支持向量”到底是什么东西。不妨回忆一下上次最后一张图:

可以看到两个支撑着中间的 gap 的超平面,它们到中间的 separating hyper plane 的距离相等(想想看:为什么一定是相等的?),即我们所能得到的最大的 geometrical margin
很显然,由于这些 supporting vector 刚好在边界上,所以它们是满足
当然,除了从几何直观上之外,支持向量的概念也会从其优化过程的推导中得到。其实上一次还偷偷卖了另一个关子就是虽然给出了目标函数,却没有讲怎么来求解。现在就让我们来处理这个问题。回忆一下之前得到的目标函数:
这个问题等价于(为了方便求解,我在这里加上了平方,还有一个系数,显然这两个问题是等价的,因为我们关心的并不是最优情况下目标函数的具体数值):
到这个形式以后,就可以很明显地看出来,它是一个凸优化问题,或者更具体地说,它是一个二次优化问题——目标函数是二次的,约束条件是线性的。这个问题可以用任何现成的 QP (Quadratic Programming) 的优化包进行求解。所以,我们的问题到此为止就算全部解决了,于是我睡午觉去了~ 
啊?呃,有人说我偷懒不负责任了?好吧,嗯,其实呢,虽然这个问题确实是一个标准的 QP 问题,但是它也有它的特殊结构,通过 Lagrange Duality 变换到对偶变量 (dual variable) 的优化问题之后,可以找到一种更加有效的方法来进行求解——这也是 SVM 盛行的一大原因,通常情况下这种方法比直接使用通用的 QP 优化包进行优化要高效得多。此外,在推导过程中,许多有趣的特征也会被揭露出来,包括刚才提到的 supporting vector 的问题。
关于 Lagrange duality 我没有办法在这里细讲了,可以参考 Wikipedia 。简单地来说,通过给每一个约束条件加上一个 Lagrange multiplier,我们可以将它们融和到目标函数里去
然后我们令
容易验证,当某个约束条件不满足时,例如
这里用
当然,交换以后的问题不再等价于原问题,这个新问题的最优值用 总之,第二个问题的最优值
首先要让
带回
此时我们得到关于 dual variable
如前面所说,这个问题有更加高效的优化算法,不过具体方法在这里先不介绍,让我们先来看看推导过程中得到的一些有趣的形式。首先就是关于我们的 hyper plane ,对于一个数据点
这里的形式的有趣之处在于,对于新点
为什么非支持向量对应的
注意到如果 
嗯,于是呢,把所有的这些东西整合起来,得到的一个 maximum margin hyper plane classifier 就是支持向量机(Support Vector Machine),经过直观的感觉和数学上的推导,为什么叫“支持向量”,应该也就明了了吧?当然,到目前为止,我们的 SVM 还比较弱,只能处理线性的情况,不过,在得到了 dual 形式之后,通过 Kernel 推广到非线性的情况就变成了一件非常容易的事情了。不过,具体细节,还要留到下一次再细说了。

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1371
1371
 52
52

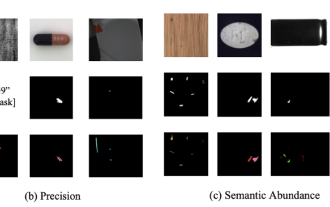 Menerobos sempadan pengesanan kecacatan tradisional, 'Spektrum Kecacatan' mencapai ketepatan ultra tinggi dan pengesanan kecacatan industri semantik yang kaya buat kali pertama.
Jul 26, 2024 pm 05:38 PM
Menerobos sempadan pengesanan kecacatan tradisional, 'Spektrum Kecacatan' mencapai ketepatan ultra tinggi dan pengesanan kecacatan industri semantik yang kaya buat kali pertama.
Jul 26, 2024 pm 05:38 PM
Dalam pembuatan moden, pengesanan kecacatan yang tepat bukan sahaja kunci untuk memastikan kualiti produk, tetapi juga teras untuk meningkatkan kecekapan pengeluaran. Walau bagaimanapun, set data pengesanan kecacatan sedia ada selalunya tidak mempunyai ketepatan dan kekayaan semantik yang diperlukan untuk aplikasi praktikal, menyebabkan model tidak dapat mengenal pasti kategori atau lokasi kecacatan tertentu. Untuk menyelesaikan masalah ini, pasukan penyelidik terkemuka yang terdiri daripada Universiti Sains dan Teknologi Hong Kong Guangzhou dan Teknologi Simou telah membangunkan set data "DefectSpectrum" secara inovatif, yang menyediakan anotasi berskala besar yang kaya dengan semantik bagi kecacatan industri. Seperti yang ditunjukkan dalam Jadual 1, berbanding set data industri lain, set data "DefectSpectrum" menyediakan anotasi kecacatan yang paling banyak (5438 sampel kecacatan) dan klasifikasi kecacatan yang paling terperinci (125 kategori kecacatan
 Model dialog NVIDIA ChatQA telah berkembang kepada versi 2.0, dengan panjang konteks disebut pada 128K
Jul 26, 2024 am 08:40 AM
Model dialog NVIDIA ChatQA telah berkembang kepada versi 2.0, dengan panjang konteks disebut pada 128K
Jul 26, 2024 am 08:40 AM
Komuniti LLM terbuka ialah era apabila seratus bunga mekar dan bersaing Anda boleh melihat Llama-3-70B-Instruct, QWen2-72B-Instruct, Nemotron-4-340B-Instruct, Mixtral-8x22BInstruct-v0.1 dan banyak lagi. model yang cemerlang. Walau bagaimanapun, berbanding dengan model besar proprietari yang diwakili oleh GPT-4-Turbo, model terbuka masih mempunyai jurang yang ketara dalam banyak bidang. Selain model umum, beberapa model terbuka yang mengkhusus dalam bidang utama telah dibangunkan, seperti DeepSeek-Coder-V2 untuk pengaturcaraan dan matematik, dan InternVL untuk tugasan bahasa visual.
 Google AI memenangi pingat perak IMO Mathematical Olympiad, model penaakulan matematik AlphaProof telah dilancarkan dan pembelajaran pengukuhan kembali
Jul 26, 2024 pm 02:40 PM
Google AI memenangi pingat perak IMO Mathematical Olympiad, model penaakulan matematik AlphaProof telah dilancarkan dan pembelajaran pengukuhan kembali
Jul 26, 2024 pm 02:40 PM
Bagi AI, Olimpik Matematik tidak lagi menjadi masalah. Pada hari Khamis, kecerdasan buatan Google DeepMind menyelesaikan satu kejayaan: menggunakan AI untuk menyelesaikan soalan sebenar IMO Olimpik Matematik Antarabangsa tahun ini, dan ia hanya selangkah lagi untuk memenangi pingat emas. Pertandingan IMO yang baru berakhir minggu lalu mempunyai enam soalan melibatkan algebra, kombinatorik, geometri dan teori nombor. Sistem AI hibrid yang dicadangkan oleh Google mendapat empat soalan dengan betul dan memperoleh 28 mata, mencapai tahap pingat perak. Awal bulan ini, profesor UCLA, Terence Tao baru sahaja mempromosikan Olimpik Matematik AI (Anugerah Kemajuan AIMO) dengan hadiah berjuta-juta dolar Tanpa diduga, tahap penyelesaian masalah AI telah meningkat ke tahap ini sebelum Julai. Lakukan soalan secara serentak pada IMO Perkara yang paling sukar untuk dilakukan dengan betul ialah IMO, yang mempunyai sejarah terpanjang, skala terbesar dan paling negatif
 Pandangan alam semula jadi: Ujian kecerdasan buatan dalam perubatan berada dalam keadaan huru-hara Apa yang perlu dilakukan?
Aug 22, 2024 pm 04:37 PM
Pandangan alam semula jadi: Ujian kecerdasan buatan dalam perubatan berada dalam keadaan huru-hara Apa yang perlu dilakukan?
Aug 22, 2024 pm 04:37 PM
Editor |. ScienceAI Berdasarkan data klinikal yang terhad, beratus-ratus algoritma perubatan telah diluluskan. Para saintis sedang membahaskan siapa yang harus menguji alat dan cara terbaik untuk melakukannya. Devin Singh menyaksikan seorang pesakit kanak-kanak di bilik kecemasan mengalami serangan jantung semasa menunggu rawatan untuk masa yang lama, yang mendorongnya untuk meneroka aplikasi AI untuk memendekkan masa menunggu. Menggunakan data triage daripada bilik kecemasan SickKids, Singh dan rakan sekerja membina satu siri model AI untuk menyediakan potensi diagnosis dan mengesyorkan ujian. Satu kajian menunjukkan bahawa model ini boleh mempercepatkan lawatan doktor sebanyak 22.3%, mempercepatkan pemprosesan keputusan hampir 3 jam bagi setiap pesakit yang memerlukan ujian perubatan. Walau bagaimanapun, kejayaan algoritma kecerdasan buatan dalam penyelidikan hanya mengesahkan perkara ini
 Latihan dengan berjuta-juta data kristal untuk menyelesaikan masalah fasa kristalografi, kaedah pembelajaran mendalam PhAI diterbitkan dalam Sains
Aug 08, 2024 pm 09:22 PM
Latihan dengan berjuta-juta data kristal untuk menyelesaikan masalah fasa kristalografi, kaedah pembelajaran mendalam PhAI diterbitkan dalam Sains
Aug 08, 2024 pm 09:22 PM
Editor |KX Sehingga hari ini, perincian dan ketepatan struktur yang ditentukan oleh kristalografi, daripada logam ringkas kepada protein membran yang besar, tidak dapat ditandingi oleh mana-mana kaedah lain. Walau bagaimanapun, cabaran terbesar, yang dipanggil masalah fasa, kekal mendapatkan maklumat fasa daripada amplitud yang ditentukan secara eksperimen. Penyelidik di Universiti Copenhagen di Denmark telah membangunkan kaedah pembelajaran mendalam yang dipanggil PhAI untuk menyelesaikan masalah fasa kristal Rangkaian saraf pembelajaran mendalam yang dilatih menggunakan berjuta-juta struktur kristal tiruan dan data pembelauan sintetik yang sepadan boleh menghasilkan peta ketumpatan elektron yang tepat. Kajian menunjukkan bahawa kaedah penyelesaian struktur ab initio berasaskan pembelajaran mendalam ini boleh menyelesaikan masalah fasa pada resolusi hanya 2 Angstrom, yang bersamaan dengan hanya 10% hingga 20% daripada data yang tersedia pada resolusi atom, manakala Pengiraan ab initio tradisional
 Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Editor |ScienceAI Question Answering (QA) set data memainkan peranan penting dalam mempromosikan penyelidikan pemprosesan bahasa semula jadi (NLP). Set data QA berkualiti tinggi bukan sahaja boleh digunakan untuk memperhalusi model, tetapi juga menilai dengan berkesan keupayaan model bahasa besar (LLM), terutamanya keupayaan untuk memahami dan menaakul tentang pengetahuan saintifik. Walaupun pada masa ini terdapat banyak set data QA saintifik yang meliputi bidang perubatan, kimia, biologi dan bidang lain, set data ini masih mempunyai beberapa kekurangan. Pertama, borang data adalah agak mudah, kebanyakannya adalah soalan aneka pilihan. Ia mudah dinilai, tetapi mengehadkan julat pemilihan jawapan model dan tidak dapat menguji sepenuhnya keupayaan model untuk menjawab soalan saintifik. Sebaliknya, Soal Jawab terbuka
 Mengenal pasti molekul terbaik secara automatik dan mengurangkan kos sintesis MIT membangunkan rangka kerja algoritma pembuatan keputusan reka bentuk molekul
Jun 22, 2024 am 06:43 AM
Mengenal pasti molekul terbaik secara automatik dan mengurangkan kos sintesis MIT membangunkan rangka kerja algoritma pembuatan keputusan reka bentuk molekul
Jun 22, 2024 am 06:43 AM
Editor |. Penggunaan Ziluo AI dalam memperkemas penemuan dadah semakin meletup. Skrin berbilion molekul calon untuk mereka yang mungkin mempunyai sifat yang diperlukan untuk membangunkan ubat baharu. Terdapat begitu banyak pembolehubah untuk dipertimbangkan, daripada harga material kepada risiko kesilapan, sehingga menimbang kos mensintesis molekul calon terbaik bukanlah tugas yang mudah, walaupun saintis menggunakan AI. Di sini, penyelidik MIT membangunkan SPARROW, rangka kerja algoritma membuat keputusan kuantitatif, untuk mengenal pasti calon molekul terbaik secara automatik, dengan itu meminimumkan kos sintesis sambil memaksimumkan kemungkinan calon mempunyai sifat yang diingini. Algoritma juga menentukan bahan dan langkah eksperimen yang diperlukan untuk mensintesis molekul ini. SPARROW mengambil kira kos mensintesis sekumpulan molekul sekaligus, memandangkan berbilang molekul calon selalunya tersedia
 Prestasi SOTA, kaedah AI ramalan pertalian protein-ligan pelbagai mod Xiamen, menggabungkan maklumat permukaan molekul buat kali pertama
Jul 17, 2024 pm 06:37 PM
Prestasi SOTA, kaedah AI ramalan pertalian protein-ligan pelbagai mod Xiamen, menggabungkan maklumat permukaan molekul buat kali pertama
Jul 17, 2024 pm 06:37 PM
Editor |. KX Dalam bidang penyelidikan dan pembangunan ubat, meramalkan pertalian pengikatan protein dan ligan dengan tepat dan berkesan adalah penting untuk pemeriksaan dan pengoptimuman ubat. Walau bagaimanapun, kajian semasa tidak mengambil kira peranan penting maklumat permukaan molekul dalam interaksi protein-ligan. Berdasarkan ini, penyelidik dari Universiti Xiamen mencadangkan rangka kerja pengekstrakan ciri berbilang mod (MFE) novel, yang buat pertama kalinya menggabungkan maklumat mengenai permukaan protein, struktur dan jujukan 3D, dan menggunakan mekanisme perhatian silang untuk membandingkan ciri modaliti yang berbeza penjajaran. Keputusan eksperimen menunjukkan bahawa kaedah ini mencapai prestasi terkini dalam meramalkan pertalian mengikat protein-ligan. Tambahan pula, kajian ablasi menunjukkan keberkesanan dan keperluan maklumat permukaan protein dan penjajaran ciri multimodal dalam rangka kerja ini. Penyelidikan berkaitan bermula dengan "S
