
 Peranti teknologi
AI
Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi
Peranti teknologi
AI
Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi
Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi

01 Tinjauan Tinjauan
Pada masa ini, sukar untuk mencapai keseimbangan yang tepat antara kecekapan pengesanan dan hasil pengesanan. Kami telah membangunkan algoritma YOLOv5 yang dipertingkatkan untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi, menggunakan piramid ciri berbilang lapisan, strategi kepala pengesanan berbilang dan modul perhatian hibrid untuk meningkatkan kesan rangkaian pengesanan sasaran dalam imej penderiaan jauh optik. Menurut set data SIMD, peta algoritma baharu adalah 2.2% lebih baik daripada YOLOv5 dan 8.48% lebih baik daripada YOLOX, mencapai keseimbangan yang lebih baik antara hasil pengesanan dan kelajuan.
02 Latar Belakang & Motivasi
Dengan perkembangan pesat teknologi penderiaan jauh, imej penderiaan jauh optik resolusi tinggi telah digunakan untuk menggambarkan banyak objek di permukaan bumi, termasuk pesawat, kereta, bangunan, dll. Pengesanan objek memainkan peranan penting dalam tafsiran imej penderiaan jauh dan boleh digunakan untuk pembahagian, penerangan dan penjejakan sasaran imej penderiaan jauh. Walau bagaimanapun, disebabkan medan pandangan yang agak besar dan keperluan altitud tinggi, imej penderiaan jauh optik udara mempamerkan kepelbagaian dalam skala, kekhususan sudut pandangan, orientasi rawak dan kerumitan latar belakang yang tinggi, manakala kebanyakan set data tradisional mengandungi pandangan darat . Akibatnya, teknik yang digunakan untuk membina pengesanan ciri buatan secara tradisinya mempunyai rekod perbezaan besar dalam ketepatan dan kelajuan. Disebabkan keperluan masyarakat dan sokongan pembangunan pembelajaran mendalam, penggunaan rangkaian saraf untuk pengesanan sasaran dalam imej penderiaan jauh optik adalah perlu.
Pada masa ini, algoritma pengesanan sasaran yang menggabungkan pembelajaran mendalam untuk menganalisis foto penderiaan jauh optik boleh dibahagikan kepada tiga jenis: diawasi, tidak diawasi dan diawasi lemah. Walau bagaimanapun, disebabkan oleh kerumitan dan ketidakpastian algoritma yang tidak diselia dan diselia dengan lemah, algoritma yang diselia ialah algoritma yang paling biasa digunakan. Tambahan pula, algoritma pengesanan objek yang diselia boleh dibahagikan kepada satu peringkat atau dua peringkat. Berdasarkan andaian bahawa pesawat biasanya terletak di lapangan terbang dan kapal biasanya terletak di pelabuhan dan lautan, mengesan lapangan terbang dan pelabuhan dalam imej bintang yang dikurangkan dan kemudian memetakan objek yang ditemui kembali kepada imej satelit resolusi ultra tinggi asal boleh mengesan objek saiz yang berbeza secara serentak. Sesetengah penyelidik telah mencadangkan kaedah pengesanan sasaran berputar berdasarkan RCNN, yang meningkatkan ketepatan pengesanan sasaran dalam imej penderiaan jauh dengan menyelesaikan masalah rawak arah sasaran.
03 Penyelidikan algoritma baharu
Kebanyakan kepala pengesanan siri YOLO semasa adalah berdasarkan ciri keluaran FPN dan PAFPN Antaranya, rangkaian berasaskan FPN, seperti YOLOv3, dan variannya ditunjukkan dalam Rajah a di bawah. Mereka secara langsung menggunakan ciri gabungan sehala untuk output. YOLOv4 dan YOLOv5 berdasarkan algoritma PAFPN menambah saluran tahap rendah ke tahap tinggi atas dasar ini, yang secara langsung menghantar isyarat tahap rendah ke atas (b di bawah).
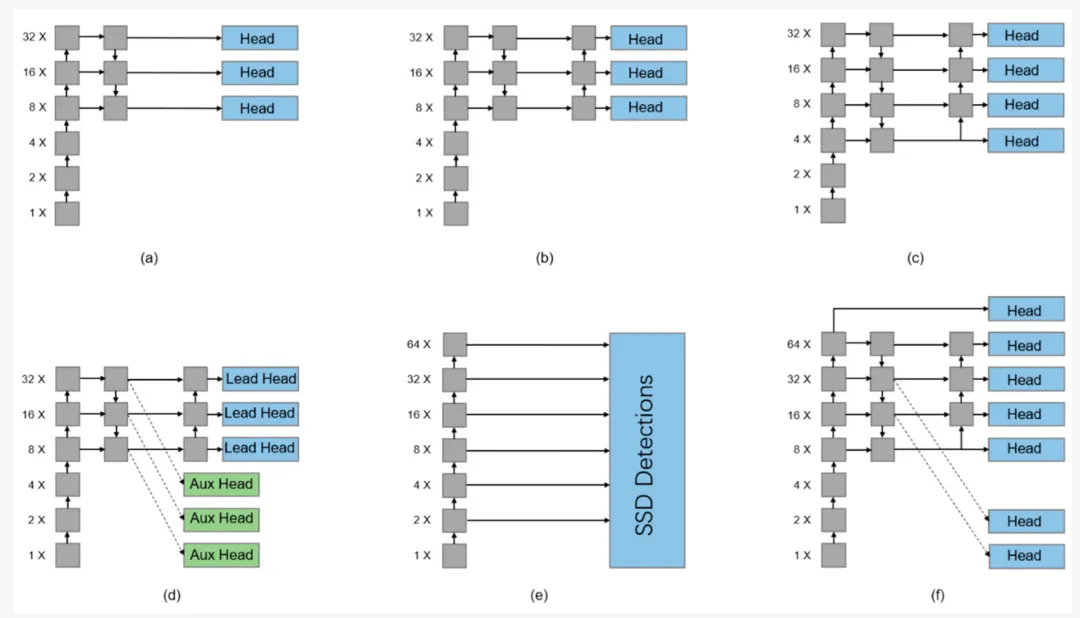
Seperti yang ditunjukkan dalam rajah di atas, dalam beberapa kajian, kepala pengesan telah ditambahkan untuk tugas pengesanan khusus dalam model TPH-YOLOv5. Dalam Rajah b dan c di atas, hanya fungsi PAFPN boleh digunakan untuk output, manakala fungsi FPN tidak digunakan sepenuhnya. Oleh itu, YOLOv7 menghubungkan tiga kepala tambahan kepada output FPN, seperti yang ditunjukkan dalam Rajah d di atas, walaupun kepala tambahan hanya digunakan untuk "pemilihan kasar" dan mempunyai penilaian berat yang lebih rendah. Ketua pengesan SSD dicadangkan untuk menambah baik reka bentuk rangkaian YOLO yang terlalu kasar bagi set penambat, dan mencadangkan reka bentuk penambat padat berdasarkan pelbagai skala. Seperti yang ditunjukkan dalam Rajah f, strategi ini boleh menggunakan maklumat ciri PANet dan FPN secara serentak. Di samping itu, terdapat proses pensampelan turun 64x yang secara langsung menambah output, yang menjadikan rangkaian mengandungi maklumat global sebelumnya.
Kaedah kepala pengesanan berbilang boleh menggunakan ciri keluaran rangkaian dengan berkesan. YOLO yang dipertingkatkan ialah rangkaian pengesanan objek untuk foto penderiaan jauh resolusi tinggi. Seperti yang ditunjukkan dalam rajah di bawah:

Struktur asas rangkaian tulang belakang ialah rangkaian padat CSP dengan C3 dan modul konvolusi sebagai teras. Selepas penambahan data, imej dimasukkan ke dalam rangkaian dan selepas pencampuran saluran oleh modul Conv dengan saiz kernel 6, banyak modul konvolusi melakukan pengambilan ciri. Selepas modul peningkatan ciri yang dipanggil SPPF, ia disambungkan ke PANet Neck. Untuk meningkatkan keupayaan pengesanan rangkaian, gabungan ciri dua hala dilakukan. Conv2d digunakan untuk mengembangkan lapisan ciri bercantum secara bebas untuk menjana output berbilang lapisan. Seperti yang ditunjukkan dalam rajah di bawah, algoritma NMS menggabungkan output semua pengesan satu lapisan untuk menjana bingkai pengesanan akhir.

Rajah b di bawah menerangkan komposisi struktur setiap modul rangkaian YOLO yang dipertingkatkan.

Penukaran termasuk lapisan lilitan 2D, normalisasi kelompok lapisan BN dan fungsi pengaktifan Silu, C3 termasuk dua lapisan lilitan 2D dan lapisan bottleneck, dan Upsample ialah lapisan upsample. Modul SPPF ialah versi dipercepatkan bagi modul SPP, modul MAB adalah seperti yang dinyatakan di atas, dan ECA adalah seperti yang ditunjukkan di sudut kiri bawah. Selepas pengumpulan purata global peringkat saluran tanpa pengurangan dimensi, lilitan 1D yang pantas bersaiz k digunakan untuk menangkap maklumat interaksi merentas saluran tempatan, dengan mengambil kira hubungan setiap saluran dengan jiran knya, dengan itu melaksanakan ECA dengan cekap. Dua transformasi di atas mengumpul ciri di sepanjang dua arah spatial untuk menghasilkan sepasang peta ciri sedar arah, yang kemudiannya digabungkan dan diubah suai menggunakan fungsi lilitan dan sigmoid untuk memberikan output perhatian.
04 Eksperimen dan Visualisasi
Set data SIMD ialah set data pengesanan objek penderiaan jauh berbilang kategori, sumber terbuka, resolusi tinggi, yang mengandungi sejumlah 15 kategori, seperti yang ditunjukkan dalam Rajah 4. Di samping itu, set data SIMD lebih banyak diedarkan dalam sasaran kecil dan sederhana (w


Anda boleh menyambungkan output modul SPPF ke pengepala output untuk mengenal pasti sasaran besar dalam imej. Walau bagaimanapun, output modul SPPF mempunyai berbilang sambungan dan melibatkan sasaran pada pelbagai skala, jadi menggunakannya secara langsung untuk kepala pengesanan untuk mengenal pasti objek besar akan mengakibatkan perwakilan model yang lemah, seperti yang ditunjukkan dalam rajah di atas, menunjukkan sebelum dan selepas menambah Modul MAB Perbandingan visual peta haba bagi beberapa hasil pengesanan. Selepas menambah modul MAB, kepala pengesanan memfokuskan pada pengesanan sasaran besar, dan memperuntukkan ramalan sasaran kecil kepada kepala ramalan lain, yang meningkatkan kesan ekspresi model dan lebih selaras dengan keperluan pembahagian kepala pengesanan berdasarkan sasaran saiz dalam algoritma YOLO.

Beberapa keputusan ujian ditunjukkan dalam gambar di atas. Berdasarkan setiap hasil pengesanan, tidak terdapat banyak perbezaan daripada algoritma lain Namun, berbanding dengan algoritma lain, algoritma yang kami pelajari meningkatkan kesan pengesanan model sambil memastikan penggunaan masa tidak meningkat dengan ketara, dan menggunakan mekanisme perhatian untuk. meningkatkan Kesan ekspresi model.

Atas ialah kandungan terperinci Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas



 Penyelesaian kepada i7-7700 tidak dapat menaik taraf kepada Windows 11
Dec 26, 2023 pm 06:52 PM
Penyelesaian kepada i7-7700 tidak dapat menaik taraf kepada Windows 11
Dec 26, 2023 pm 06:52 PM
Prestasi i77700 adalah mencukupi untuk menjalankan win11, tetapi pengguna mendapati bahawa i77700 mereka tidak boleh dinaik taraf kepada win11 Ini terutamanya disebabkan oleh sekatan yang dikenakan oleh Microsoft, jadi mereka boleh memasangnya selagi mereka melangkau sekatan ini. i77700 tidak boleh dinaik taraf kepada win11: 1. Kerana Microsoft mengehadkan versi CPU. 2. Hanya Intel generasi kelapan dan versi ke atas boleh terus menaik taraf kepada win11 3. Sebagai generasi ke-7, i77700 tidak dapat memenuhi keperluan naik taraf win11. 4. Walau bagaimanapun, i77700 benar-benar mampu menggunakan win11 dengan lancar dari segi prestasi. 5. Jadi anda boleh menggunakan sistem pemasangan langsung win11 laman web ini. 6. Selepas muat turun selesai, klik kanan fail dan "muat"nya. 7. Klik dua kali untuk menjalankan "Satu klik
 CLIP-BEVFormer: Selia secara eksplisit struktur BEVFormer untuk meningkatkan prestasi pengesanan ekor panjang
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer: Selia secara eksplisit struktur BEVFormer untuk meningkatkan prestasi pengesanan ekor panjang
Mar 26, 2024 pm 12:41 PM
Ditulis di atas & pemahaman peribadi penulis: Pada masa ini, dalam keseluruhan sistem pemanduan autonomi, modul persepsi memainkan peranan penting Hanya selepas kenderaan pemanduan autonomi yang memandu di jalan raya memperoleh keputusan persepsi yang tepat melalui modul persepsi boleh Peraturan hiliran dan. modul kawalan dalam sistem pemanduan autonomi membuat pertimbangan dan keputusan tingkah laku yang tepat pada masanya dan betul. Pada masa ini, kereta dengan fungsi pemanduan autonomi biasanya dilengkapi dengan pelbagai penderia maklumat data termasuk penderia kamera pandangan sekeliling, penderia lidar dan penderia radar gelombang milimeter untuk mengumpul maklumat dalam modaliti yang berbeza untuk mencapai tugas persepsi yang tepat. Algoritma persepsi BEV berdasarkan penglihatan tulen digemari oleh industri kerana kos perkakasannya yang rendah dan penggunaan mudah, dan hasil keluarannya boleh digunakan dengan mudah untuk pelbagai tugas hiliran.
 Melaksanakan Algoritma Pembelajaran Mesin dalam C++: Cabaran dan Penyelesaian Biasa
Jun 03, 2024 pm 01:25 PM
Melaksanakan Algoritma Pembelajaran Mesin dalam C++: Cabaran dan Penyelesaian Biasa
Jun 03, 2024 pm 01:25 PM
Cabaran biasa yang dihadapi oleh algoritma pembelajaran mesin dalam C++ termasuk pengurusan memori, multi-threading, pengoptimuman prestasi dan kebolehselenggaraan. Penyelesaian termasuk menggunakan penunjuk pintar, perpustakaan benang moden, arahan SIMD dan perpustakaan pihak ketiga, serta mengikuti garis panduan gaya pengekodan dan menggunakan alat automasi. Kes praktikal menunjukkan cara menggunakan perpustakaan Eigen untuk melaksanakan algoritma regresi linear, mengurus memori dengan berkesan dan menggunakan operasi matriks berprestasi tinggi.
 Terokai prinsip asas dan pemilihan algoritma bagi fungsi isihan C++
Apr 02, 2024 pm 05:36 PM
Terokai prinsip asas dan pemilihan algoritma bagi fungsi isihan C++
Apr 02, 2024 pm 05:36 PM
Lapisan bawah fungsi C++ sort menggunakan isihan gabungan, kerumitannya ialah O(nlogn), dan menyediakan pilihan algoritma pengisihan yang berbeza, termasuk isihan pantas, isihan timbunan dan isihan stabil.
 Bolehkah kecerdasan buatan meramalkan jenayah? Terokai keupayaan CrimeGPT
Mar 22, 2024 pm 10:10 PM
Bolehkah kecerdasan buatan meramalkan jenayah? Terokai keupayaan CrimeGPT
Mar 22, 2024 pm 10:10 PM
Konvergensi kecerdasan buatan (AI) dan penguatkuasaan undang-undang membuka kemungkinan baharu untuk pencegahan dan pengesanan jenayah. Keupayaan ramalan kecerdasan buatan digunakan secara meluas dalam sistem seperti CrimeGPT (Teknologi Ramalan Jenayah) untuk meramal aktiviti jenayah. Artikel ini meneroka potensi kecerdasan buatan dalam ramalan jenayah, aplikasi semasanya, cabaran yang dihadapinya dan kemungkinan implikasi etika teknologi tersebut. Kecerdasan Buatan dan Ramalan Jenayah: Asas CrimeGPT menggunakan algoritma pembelajaran mesin untuk menganalisis set data yang besar, mengenal pasti corak yang boleh meramalkan di mana dan bila jenayah mungkin berlaku. Set data ini termasuk statistik jenayah sejarah, maklumat demografi, penunjuk ekonomi, corak cuaca dan banyak lagi. Dengan mengenal pasti trend yang mungkin terlepas oleh penganalisis manusia, kecerdasan buatan boleh memperkasakan agensi penguatkuasaan undang-undang
 Karya terbaharu MIT: menggunakan GPT-3.5 untuk menyelesaikan masalah pengesanan anomali siri masa
Jun 08, 2024 pm 06:09 PM
Karya terbaharu MIT: menggunakan GPT-3.5 untuk menyelesaikan masalah pengesanan anomali siri masa
Jun 08, 2024 pm 06:09 PM
Hari ini saya ingin memperkenalkan kepada anda artikel yang diterbitkan oleh MIT minggu lepas, menggunakan GPT-3.5-turbo untuk menyelesaikan masalah pengesanan anomali siri masa, dan pada mulanya mengesahkan keberkesanan LLM dalam pengesanan anomali siri masa. Tiada penalaan dalam keseluruhan proses, dan GPT-3.5-turbo digunakan secara langsung untuk pengesanan anomali Inti artikel ini ialah cara menukar siri masa kepada input yang boleh dikenali oleh GPT-3.5-turbo, dan cara mereka bentuk. gesaan atau saluran paip untuk membenarkan LLM menyelesaikan tugas pengesanan anomali. Izinkan saya memperkenalkan karya ini kepada anda secara terperinci. Tajuk kertas imej: Largelanguagemodelscanbezero-shotanomalydete
 Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi
Jun 06, 2024 pm 12:33 PM
Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi
Jun 06, 2024 pm 12:33 PM
01Garis prospek Pada masa ini, sukar untuk mencapai keseimbangan yang sesuai antara kecekapan pengesanan dan hasil pengesanan. Kami telah membangunkan algoritma YOLOv5 yang dipertingkatkan untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi, menggunakan piramid ciri berbilang lapisan, strategi kepala pengesanan berbilang dan modul perhatian hibrid untuk meningkatkan kesan rangkaian pengesanan sasaran dalam imej penderiaan jauh optik. Menurut set data SIMD, peta algoritma baharu adalah 2.2% lebih baik daripada YOLOv5 dan 8.48% lebih baik daripada YOLOX, mencapai keseimbangan yang lebih baik antara hasil pengesanan dan kelajuan. 02 Latar Belakang & Motivasi Dengan perkembangan pesat teknologi penderiaan jauh, imej penderiaan jauh optik resolusi tinggi telah digunakan untuk menggambarkan banyak objek di permukaan bumi, termasuk pesawat, kereta, bangunan, dll. Pengesanan objek dalam tafsiran imej penderiaan jauh
 Aplikasi algoritma dalam pembinaan 58 platform potret
May 09, 2024 am 09:01 AM
Aplikasi algoritma dalam pembinaan 58 platform potret
May 09, 2024 am 09:01 AM
1. Latar Belakang Pembinaan 58 Portrait Platform Pertama sekali, saya ingin berkongsi dengan anda latar belakang pembinaan 58 Portrait Platform. 1. Pemikiran tradisional platform pemprofilan tradisional tidak lagi mencukupi Membina platform pemprofilan pengguna bergantung pada keupayaan pemodelan gudang data untuk menyepadukan data daripada pelbagai barisan perniagaan untuk membina potret pengguna yang tepat untuk memahami tingkah laku, minat pengguna dan keperluan, dan menyediakan keupayaan sampingan, akhirnya, ia juga perlu mempunyai keupayaan platform data untuk menyimpan, bertanya dan berkongsi data profil pengguna dan menyediakan perkhidmatan profil dengan cekap. Perbezaan utama antara platform pemprofilan perniagaan binaan sendiri dan platform pemprofilan pejabat pertengahan ialah platform pemprofilan binaan sendiri menyediakan satu barisan perniagaan dan boleh disesuaikan atas permintaan platform pertengahan pejabat berkhidmat berbilang barisan perniagaan, mempunyai kompleks pemodelan, dan menyediakan lebih banyak keupayaan umum. 2.58 Potret pengguna latar belakang pembinaan potret di platform tengah 58
