


Algoritma kawalan MPC, nama penuhnya ialah Model Predictive Control (Model Predictive Control), ialah teknologi kawalan berdasarkan model dinamik sistem. Ia berfungsi dengan meramalkan kelakuan masa depan sistem melalui model matematik dan mengoptimumkan input kawalan sistem berdasarkan ramalan ini untuk mencapai output yang diingini. Idea teras algoritma kawalan MPC adalah untuk mendapatkan input kawalan terbaik dengan mengoptimumkan keputusan ramalan untuk satu tempoh masa pada masa hadapan dalam setiap kitaran kawalan. Pengoptimuman ini adalah berdasarkan beberapa keputusan ramalan untuk mengoptimumkan input kawalan sistem untuk mencapai output yang dikehendaki. Algoritma kawalan MPC digunakan secara meluas dan amat sesuai untuk sistem kawalan yang perlu memenuhi beberapa kekangan. Dengan menggabungkan model sistem dan teknik pengoptimuman, MPC boleh digunakan dalam industri yang berbeza Teras algoritma kawalan MPC terletak pada model ramalannya, yang boleh meramalkan keadaan sistem masa hadapan berdasarkan maklumat keadaan semasa sistem. Bentuk model ramalan tidak tetap dan boleh menjadi persamaan ruang keadaan, fungsi pemindahan, model tindak balas langkah, model tindak balas impuls, model kabur, dll. Bentuk khusus bergantung kepada objek terkawal dan keadaan yang perlu diramalkan.
TinyMPC ialah penyelesai sumber terbuka yang disesuaikan untuk kawalan ramalan model cembung, memberikan pengiraan berkelajuan tinggi. TinyMPC dilaksanakan dalam C++ dengan kebergantungan yang minimum dan amat sesuai untuk kawalan terbenam dan aplikasi robotik pada platform yang dikekang aset. TinyMPC boleh mengendalikan sempadan keadaan dan input serta kekangan tertib kedua. Antara muka Python, Julia dan MATLAB tersedia untuk membantu menjana kod untuk sistem terbenam.
Bot Demo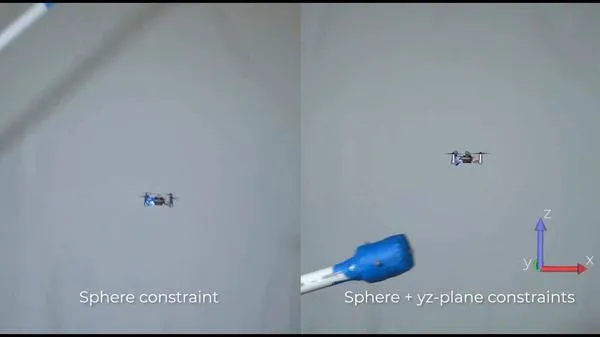
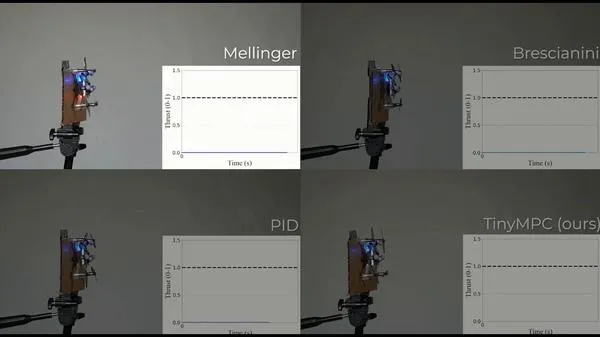
Kawalan masa nyata memerlukan penyelesai untuk mengembalikan penyelesaian dalam tetingkap masa yang ketat. Prestasi pengesanan trajektori TinyMPC dibandingkan dengan SCS dan ECOS pada masalah pendaratan lembut roket sambil mengubah secara buatan jumlah masa yang tersedia untuk setiap penyelesaian. TinyMPC mempunyai lebih sedikit pelanggaran kekangan dan ralat penjejakan yang lebih rendah daripada SCS dan ECOS merentas semua tempoh kawalan. 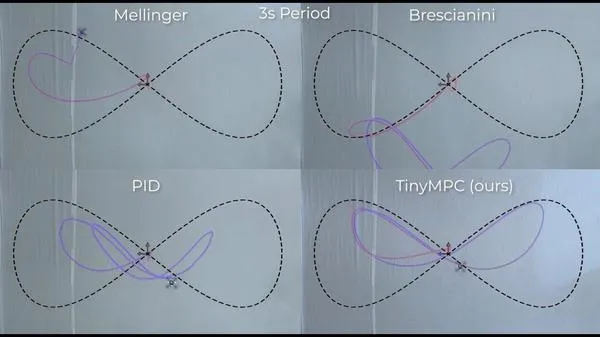
Alamat pemerolehan kod:
GitHub - TinyMPC/TinyMPC: Kawalan ramalan model untuk mikropengawal
Atas ialah kandungan terperinci Algoritma kawalan yang lebih sutera daripada PID & Carnegie Mellon University. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



