
 Peranti teknologi
AI
Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci
Peranti teknologi
AI
Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci
Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci



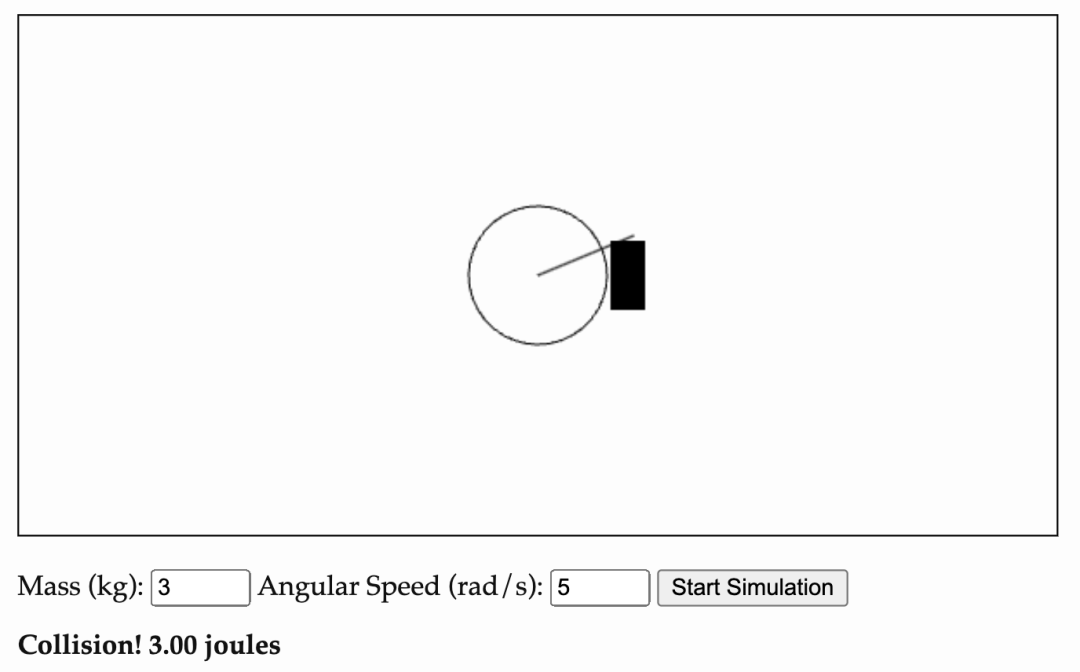
 によると、I は慣性モーメント、ω は角速度です。レバーには質量がないと想定されているため、システムの慣性は固定シリンダーの慣性と同等です:
によると、I は慣性モーメント、ω は角速度です。レバーには質量がないと想定されているため、システムの慣性は固定シリンダーの慣性と同等です:  。値を代入すると、I = 0.24 kg⋅m^2 となります。したがって、このシステムの回転運動エネルギーはさらに 3 ジュールと計算できます。
。値を代入すると、I = 0.24 kg⋅m^2 となります。したがって、このシステムの回転運動エネルギーはさらに 3 ジュールと計算できます。 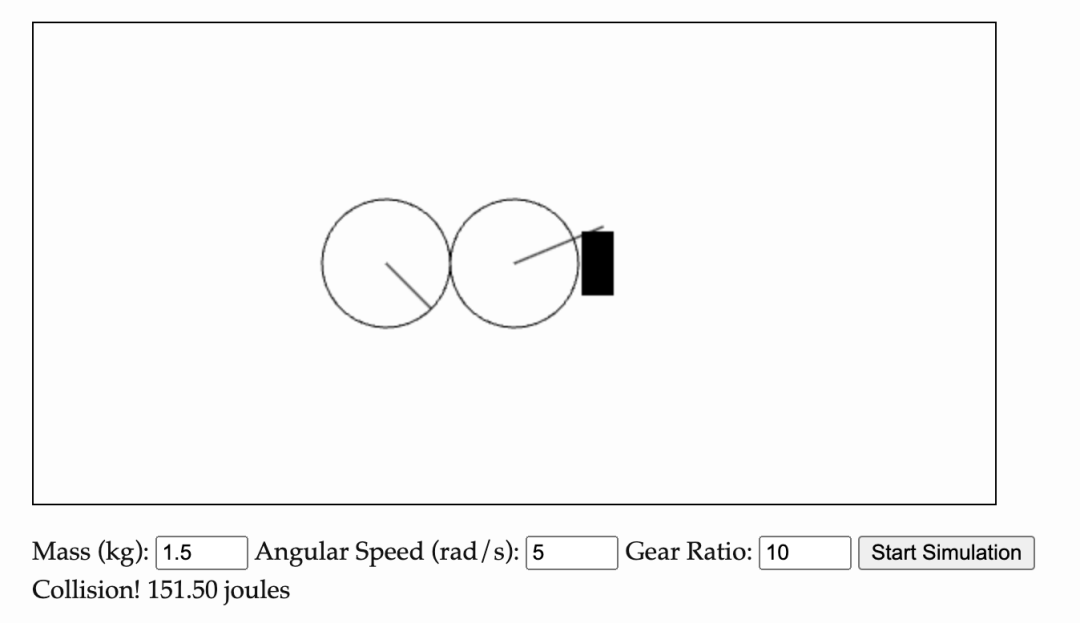

その理由は、ギアボックスが重要な機械的レバレッジを提供するためです。多くのモーターは単独で動作すると十分なトルクを提供できないため、エンジニアは高速モーターにギアを取り付けます。必要なトルクを犠牲にしています。
この種の歯車システムは「剛性」があり、一度回転し始めると歯車がしっかりと噛み合い、逆駆動することが困難になります。引き返してください。そのため、ギアボックスのもう一方の端では、高速モーターによって生成される回転力に抵抗するために、より多くの力を加える必要があります。
上記の考慮事項に基づいて、1X Technologies は過去 10 年間、トランスミッション システムの安全性を最大限に高めるために高トルク、低速モーターの製造に取り組んできました。 NEO ロボットは、ギア比が小さく軽量なモーターと駆動システムを採用しているため、家庭環境に安全に組み込むことができる初の真の家庭用ロボットとなっています。
1.一般的なロボットの進歩がボトルネックになっている。ロボットのハードウェアは高価ですが、かさばるハードウェアを使用してタスクを実行するために人間のリモート オペレーターを雇うのも同様に高価です。さらに、遠隔操作の効率は非常に低く、人間が直接タスクを完了できる速度よりもはるかに遅いです。
2. ヘッドマウント カメラを人々にストラップで固定し、肉を覆う大きなゴム手袋を着用してもらうと、さまざまな雑用を行っている人々の大規模なデータセットをすぐに収集できます。そしてタスク。普通の人は、日常生活の中で無意識のうちにさまざまな動作や操作タスクを実行します。生のモーション出力を直接認識することは困難ですが、ビデオ内のポーズの変化を分析することでアクションを推測できます。このタイプのデータ収集は、より高度なハードウェアが利用可能になるまで、汎用ロボットの開発の障壁を取り除くのに役立つ可能性があります。
3. インターネット上には一人称および三人称のビデオが多数あり、これらをロボットに訓練して、ビデオ内で人間が行うさまざまなアクティビティを認識および学習させることで、さらに拡張することができます。データサイズ。
この種のデータ収集を拡大する前に、5000 RPM で回転するモーターと比較して、私たちの身体には高速回転する部品がないことに注意することも重要です。 、筋肉の運動エネルギーは非常に低く、私たちが移動するときに運ぶ有効質量もはるかに小さいため、ロボットの関節角度は人間のそれとほぼ同じであっても、回転モーターによって提供される有効質量は、器用にタスクを実行するには大きすぎます。
効率的な動作制御戦略を開発したとしても、ロボットは、照明を簡単にオン/オフしたり、優雅に走ったりするなどの動作を実行する際に、依然として人間の速度と流暢さに達することはできません。これは、ロボットが物体に触れたときにかかる力が人間とは大きく異なるためです。
人間のビデオをロボットの動作戦略にすばやく変換したい場合は、次のメソッドが必要です:
1. NEO
のような非常に従順で柔軟なロボット 2. 「 」を直接コピーするのではなく、ロボットにビデオのモーション軌跡を 1 倍よりも遅い速度で追跡させます。ヒューマンハードウェア」のダイナミクス。ただし、これは静的な操作タスクにのみ適しており、衣服をたたむ、キッチンで食事を準備するなど、多くの物体との接触が必要なタスクには適していません。
3. 動作計画と動的計画を分離することで、動作計画は目標位置に到達することに重点を置き、動的計画は衝突時の力の制御に重点を置くことができます。
Atas ialah kandungan terperinci Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1667
1667
 14
1426
52
1328
25
1273
29
1255
24
14
1426
52
1328
25
1273
29
1255
24

 Robot DeepMind bermain pingpong, dan pukulan depan dan pukulan kilasnya tergelincir ke udara, mengalahkan manusia pemula sepenuhnya
Aug 09, 2024 pm 04:01 PM
Robot DeepMind bermain pingpong, dan pukulan depan dan pukulan kilasnya tergelincir ke udara, mengalahkan manusia pemula sepenuhnya
Aug 09, 2024 pm 04:01 PM
Tetapi mungkin dia tidak dapat mengalahkan lelaki tua di taman itu? Sukan Olimpik Paris sedang rancak berlangsung, dan pingpong telah menarik perhatian ramai. Pada masa yang sama, robot juga telah membuat penemuan baru dalam bermain pingpong. Sebentar tadi, DeepMind mencadangkan ejen robot pembelajaran pertama yang boleh mencapai tahap pemain amatur manusia dalam pingpong yang kompetitif. Alamat kertas: https://arxiv.org/pdf/2408.03906 Sejauh manakah robot DeepMind bermain pingpong? Mungkin setanding dengan pemain amatur manusia: kedua-dua pukulan depan dan pukulan kilas: pihak lawan menggunakan pelbagai gaya permainan, dan robot juga boleh bertahan: servis menerima dengan putaran yang berbeza: Walau bagaimanapun, keamatan permainan nampaknya tidak begitu sengit seperti lelaki tua di taman itu. Untuk robot, pingpong
 Cakar mekanikal pertama! Yuanluobao muncul di Persidangan Robot Dunia 2024 dan mengeluarkan robot catur pertama yang boleh memasuki rumah
Aug 21, 2024 pm 07:33 PM
Cakar mekanikal pertama! Yuanluobao muncul di Persidangan Robot Dunia 2024 dan mengeluarkan robot catur pertama yang boleh memasuki rumah
Aug 21, 2024 pm 07:33 PM
Pada 21 Ogos, Persidangan Robot Dunia 2024 telah diadakan dengan megah di Beijing. Jenama robot rumah SenseTime "Yuanluobot SenseRobot" telah memperkenalkan seluruh keluarga produknya, dan baru-baru ini mengeluarkan robot permainan catur AI Yuanluobot - Edisi Profesional Catur (selepas ini dirujuk sebagai "Yuanluobot SenseRobot"), menjadi robot catur A pertama di dunia untuk rumah. Sebagai produk robot permainan catur ketiga Yuanluobo, robot Guoxiang baharu telah melalui sejumlah besar peningkatan teknikal khas dan inovasi dalam AI dan jentera kejuruteraan Buat pertama kalinya, ia telah menyedari keupayaan untuk mengambil buah catur tiga dimensi melalui cakar mekanikal pada robot rumah, dan melaksanakan Fungsi mesin manusia seperti bermain catur, semua orang bermain catur, semakan notasi, dsb.
 Claude pun dah jadi malas! Netizen: Belajar untuk memberi percutian kepada diri sendiri
Sep 02, 2024 pm 01:56 PM
Claude pun dah jadi malas! Netizen: Belajar untuk memberi percutian kepada diri sendiri
Sep 02, 2024 pm 01:56 PM
Permulaan sekolah akan bermula, dan bukan hanya pelajar yang akan memulakan semester baharu yang harus menjaga diri mereka sendiri, tetapi juga model AI yang besar. Beberapa ketika dahulu, Reddit dipenuhi oleh netizen yang mengadu Claude semakin malas. "Tahapnya telah banyak menurun, ia sering berhenti seketika, malah output menjadi sangat singkat. Pada minggu pertama keluaran, ia boleh menterjemah dokumen penuh 4 halaman sekaligus, tetapi kini ia tidak dapat mengeluarkan separuh halaman pun. !" https:// www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/ dalam siaran bertajuk "Totally disappointed with Claude", penuh dengan
 Pada Persidangan Robot Sedunia, robot domestik yang membawa 'harapan penjagaan warga tua masa depan' ini telah dikepung
Aug 22, 2024 pm 10:35 PM
Pada Persidangan Robot Sedunia, robot domestik yang membawa 'harapan penjagaan warga tua masa depan' ini telah dikepung
Aug 22, 2024 pm 10:35 PM
Pada Persidangan Robot Dunia yang diadakan di Beijing, paparan robot humanoid telah menjadi tumpuan mutlak di gerai Stardust Intelligent, pembantu robot AI S1 mempersembahkan tiga persembahan utama dulcimer, seni mempertahankan diri dan kaligrafi dalam. satu kawasan pameran, berkebolehan kedua-dua sastera dan seni mempertahankan diri, menarik sejumlah besar khalayak profesional dan media. Permainan elegan pada rentetan elastik membolehkan S1 menunjukkan operasi halus dan kawalan mutlak dengan kelajuan, kekuatan dan ketepatan. CCTV News menjalankan laporan khas mengenai pembelajaran tiruan dan kawalan pintar di sebalik "Kaligrafi Pengasas Syarikat Lai Jie menjelaskan bahawa di sebalik pergerakan sutera, bahagian perkakasan mengejar kawalan daya terbaik dan penunjuk badan yang paling menyerupai manusia (kelajuan, beban). dll.), tetapi di sisi AI, data pergerakan sebenar orang dikumpulkan, membolehkan robot menjadi lebih kuat apabila ia menghadapi situasi yang kuat dan belajar untuk berkembang dengan cepat. Dan tangkas
 Anugerah ACL 2024 Diumumkan: Salah satu Kertas Terbaik mengenai Pentafsiran Oracle oleh HuaTech, Anugerah Ujian Masa GloVe
Aug 15, 2024 pm 04:37 PM
Anugerah ACL 2024 Diumumkan: Salah satu Kertas Terbaik mengenai Pentafsiran Oracle oleh HuaTech, Anugerah Ujian Masa GloVe
Aug 15, 2024 pm 04:37 PM
Pada persidangan ACL ini, para penyumbang telah mendapat banyak keuntungan. ACL2024 selama enam hari diadakan di Bangkok, Thailand. ACL ialah persidangan antarabangsa teratas dalam bidang linguistik pengiraan dan pemprosesan bahasa semula jadi Ia dianjurkan oleh Persatuan Antarabangsa untuk Linguistik Pengiraan dan diadakan setiap tahun. ACL sentiasa menduduki tempat pertama dalam pengaruh akademik dalam bidang NLP, dan ia juga merupakan persidangan yang disyorkan CCF-A. Persidangan ACL tahun ini adalah yang ke-62 dan telah menerima lebih daripada 400 karya termaju dalam bidang NLP. Petang semalam, persidangan itu mengumumkan kertas kerja terbaik dan anugerah lain. Kali ini, terdapat 7 Anugerah Kertas Terbaik (dua tidak diterbitkan), 1 Anugerah Kertas Tema Terbaik, dan 35 Anugerah Kertas Cemerlang. Persidangan itu turut menganugerahkan 3 Anugerah Kertas Sumber (ResourceAward) dan Anugerah Impak Sosial (
 1X Technologies mengumumkan Neo bipedal humanoid adalah satu langkah lebih dekat untuk mengambil alih tugas rumah
Sep 07, 2024 pm 03:31 PM
1X Technologies mengumumkan Neo bipedal humanoid adalah satu langkah lebih dekat untuk mengambil alih tugas rumah
Sep 07, 2024 pm 03:31 PM
1X Technologies telah mengumumkan robot humanoid Neo bipedal sedang memasuki ujian beta di rumah terpilih tahun ini berikutan pelancarannya sebelum ini. Tidak seperti robot humanoid pertama mereka, Eve, yang bergolek di atas roda, Neo berjalan seperti manusia di atas robot.
 Pasukan Li Feifei mencadangkan ReKep untuk memberi robot kecerdasan spatial dan mengintegrasikan GPT-4o
Sep 03, 2024 pm 05:18 PM
Pasukan Li Feifei mencadangkan ReKep untuk memberi robot kecerdasan spatial dan mengintegrasikan GPT-4o
Sep 03, 2024 pm 05:18 PM
Penyepaduan mendalam penglihatan dan pembelajaran robot. Apabila dua tangan robot bekerja bersama-sama dengan lancar untuk melipat pakaian, menuang teh dan mengemas kasut, ditambah pula dengan 1X robot humanoid NEO yang telah menjadi tajuk berita baru-baru ini, anda mungkin mempunyai perasaan: kita seolah-olah memasuki zaman robot. Malah, pergerakan sutera ini adalah hasil teknologi robotik canggih + reka bentuk bingkai yang indah + model besar berbilang modal. Kami tahu bahawa robot yang berguna sering memerlukan interaksi yang kompleks dan indah dengan alam sekitar, dan persekitaran boleh diwakili sebagai kekangan dalam domain spatial dan temporal. Sebagai contoh, jika anda ingin robot menuang teh, robot terlebih dahulu perlu menggenggam pemegang teko dan memastikannya tegak tanpa menumpahkan teh, kemudian gerakkannya dengan lancar sehingga mulut periuk sejajar dengan mulut cawan. , dan kemudian condongkan teko pada sudut tertentu. ini
 Persidangan Kecerdasan Buatan Teragih DAI 2024 Call for Papers: Hari Agen, Richard Sutton, bapa pembelajaran pengukuhan, akan hadir! Yan Shuicheng, Sergey Levine dan saintis DeepMind akan memberikan ucaptama
Aug 22, 2024 pm 08:02 PM
Persidangan Kecerdasan Buatan Teragih DAI 2024 Call for Papers: Hari Agen, Richard Sutton, bapa pembelajaran pengukuhan, akan hadir! Yan Shuicheng, Sergey Levine dan saintis DeepMind akan memberikan ucaptama
Aug 22, 2024 pm 08:02 PM
Pengenalan Persidangan Dengan perkembangan pesat sains dan teknologi, kecerdasan buatan telah menjadi kuasa penting dalam menggalakkan kemajuan sosial. Dalam era ini, kami bertuah untuk menyaksikan dan mengambil bahagian dalam inovasi dan aplikasi Kecerdasan Buatan Teragih (DAI). Kecerdasan buatan yang diedarkan adalah cabang penting dalam bidang kecerdasan buatan, yang telah menarik lebih banyak perhatian dalam beberapa tahun kebelakangan ini. Agen berdasarkan model bahasa besar (LLM) tiba-tiba muncul Dengan menggabungkan pemahaman bahasa yang kuat dan keupayaan penjanaan model besar, mereka telah menunjukkan potensi besar dalam interaksi bahasa semula jadi, penaakulan pengetahuan, perancangan tugas, dsb. AIAgent mengambil alih model bahasa besar dan telah menjadi topik hangat dalam kalangan AI semasa. Au
