
 pembangunan bahagian belakang
Tutorial Python
Cara Melaksanakan Pengecaman Zon Boleh Baca Mesin (MRZ) dalam Python
pembangunan bahagian belakang
Tutorial Python
Cara Melaksanakan Pengecaman Zon Boleh Baca Mesin (MRZ) dalam Python
Cara Melaksanakan Pengecaman Zon Boleh Baca Mesin (MRZ) dalam Python

機械読み取り可能ゾーン (MRZ) は、現代のパスポート、ビザ、ID カードに採用されている重要な機能です。これには、名前、性別、国コード、文書番号など、文書所有者に関する重要な情報が含まれています。 MRZ の認識は、国境管理、空港のセキュリティ、ホテルのチェックイン プロセスにおいて重要な役割を果たします。このチュートリアルでは、Dynamsoft Capture Vision SDK を利用して、Windows、Linux、および macOS に MRZ 認識を実装する方法を示します。プラットフォーム。このガイドでは、SDK の強力な機能を活用し、クロスプラットフォームの MRZ 検出をシームレスかつ効率的に行うための段階的なアプローチを提供します。
macOS での Python MRZ 認識デモ
前提条件
Dynamsoft Capture Vision トライアル ライセンス: Dynamsoft Capture Vision SDK の 30 日間のトライアル ライセンス キーを取得します。
-
Python パッケージ: 次のコマンドを使用して、必要な Python パッケージをインストールします。
pip install dynamsoft-capture-vision-bundle opencv-python
Salin selepas log masukこれらのパッケージは何のためにありますか?
- dynamsoft-capture-vision-bundle は、Python 用 Dynamsoft Capture Vision SDK です。
- opencv-python はカメラ フレームをキャプチャし、処理された画像結果を表示します。
Dynamsoft Python Capture Vision サンプルの開始
公式 MRZ スキャナーのサンプルは、Dynamsoft Capture Vision SDK を使用して簡単な Python ベースの MRZ リーダーを短時間で作成する方法を示しています。
ソース コードを見て、その機能を分析してみましょう:
import sys
from dynamsoft_capture_vision_bundle import *
import os
class MRZResult:
def __init__(self, item: ParsedResultItem):
self.doc_type = item.get_code_type()
self.raw_text=[]
self.doc_id = None
self.surname = None
self.given_name = None
self.nationality = None
self.issuer = None
self.gender = None
self.date_of_birth = None
self.date_of_expiry = None
if self.doc_type == "MRTD_TD3_PASSPORT":
if item.get_field_value("passportNumber") != None and item.get_field_validation_status("passportNumber") != EnumValidationStatus.VS_FAILED:
self.doc_id = item.get_field_value("passportNumber")
elif item.get_field_value("documentNumber") != None and item.get_field_validation_status("documentNumber") != EnumValidationStatus.VS_FAILED:
self.doc_id = item.get_field_value("documentNumber")
line = item.get_field_value("line1")
if line is not None:
if item.get_field_validation_status("line1") == EnumValidationStatus.VS_FAILED:
line += ", Validation Failed"
self.raw_text.append(line)
line = item.get_field_value("line2")
if line is not None:
if item.get_field_validation_status("line2") == EnumValidationStatus.VS_FAILED:
line += ", Validation Failed"
self.raw_text.append(line)
line = item.get_field_value("line3")
if line is not None:
if item.get_field_validation_status("line3") == EnumValidationStatus.VS_FAILED:
line += ", Validation Failed"
self.raw_text.append(line)
if item.get_field_value("nationality") != None and item.get_field_validation_status("nationality") != EnumValidationStatus.VS_FAILED:
self.nationality = item.get_field_value("nationality")
if item.get_field_value("issuingState") != None and item.get_field_validation_status("issuingState") != EnumValidationStatus.VS_FAILED:
self.issuer = item.get_field_value("issuingState")
if item.get_field_value("dateOfBirth") != None and item.get_field_validation_status("dateOfBirth") != EnumValidationStatus.VS_FAILED:
self.date_of_birth = item.get_field_value("dateOfBirth")
if item.get_field_value("dateOfExpiry") != None and item.get_field_validation_status("dateOfExpiry") != EnumValidationStatus.VS_FAILED:
self.date_of_expiry = item.get_field_value("dateOfExpiry")
if item.get_field_value("sex") != None and item.get_field_validation_status("sex") != EnumValidationStatus.VS_FAILED:
self.gender = item.get_field_value("sex")
if item.get_field_value("primaryIdentifier") != None and item.get_field_validation_status("primaryIdentifier") != EnumValidationStatus.VS_FAILED:
self.surname = item.get_field_value("primaryIdentifier")
if item.get_field_value("secondaryIdentifier") != None and item.get_field_validation_status("secondaryIdentifier") != EnumValidationStatus.VS_FAILED:
self.given_name = item.get_field_value("secondaryIdentifier")
def to_string(self):
msg = (f"Raw Text:\n")
for index, line in enumerate(self.raw_text):
msg += (f"\tLine {index + 1}: {line}\n")
msg+=(f"Parsed Information:\n"
f"\tDocumentType: {self.doc_type or ''}\n"
f"\tDocumentID: {self.doc_id or ''}\n"
f"\tSurname: {self.surname or ''}\n"
f"\tGivenName: {self.given_name or ''}\n"
f"\tNationality: {self.nationality or ''}\n"
f"\tIssuingCountryorOrganization: {self.issuer or ''}\n"
f"\tGender: {self.gender or ''}\n"
f"\tDateofBirth(YYMMDD): {self.date_of_birth or ''}\n"
f"\tExpirationDate(YYMMDD): {self.date_of_expiry or ''}\n")
return msg
def print_results(result: ParsedResult) -> None:
tag = result.get_original_image_tag()
if isinstance(tag, FileImageTag):
print("File:", tag.get_file_path())
if result.get_error_code() != EnumErrorCode.EC_OK:
print("Error:", result.get_error_string())
else:
items = result.get_items()
print("Parsed", len(items), "MRZ Zones.")
for item in items:
mrz_result = MRZResult(item)
print(mrz_result.to_string())
if __name__ == '__main__':
print("**********************************************************")
print("Welcome to Dynamsoft Capture Vision - MRZ Sample")
print("**********************************************************")
error_code, error_message = LicenseManager.init_license("LICENSE-KEY")
if error_code != EnumErrorCode.EC_OK and error_code != EnumErrorCode.EC_LICENSE_CACHE_USED:
print("License initialization failed: ErrorCode:", error_code, ", ErrorString:", error_message)
else:
cvr_instance = CaptureVisionRouter()
while (True):
image_path = input(
">> Input your image full path:\n"
">> 'Enter' for sample image or 'Q'/'q' to quit\n"
).strip('\'"')
if image_path.lower() == "q":
sys.exit(0)
if image_path == "":
image_path = "../Images/passport-sample.jpg"
if not os.path.exists(image_path):
print("The image path does not exist.")
continue
result = cvr_instance.capture(image_path, "ReadPassportAndId")
if result.get_error_code() != EnumErrorCode.EC_OK:
print("Error:", result.get_error_code(), result.get_error_string())
else:
parsed_result = result.get_parsed_result()
if parsed_result is None or len(parsed_result.get_items()) == 0:
print("No parsed results.")
else:
print_results(parsed_result)
input("Press Enter to quit...")
説明
- LicenseManager.init_license メソッドは、有効なライセンス キーを使用して Dynamsoft Capture Vision SDK を初期化します。
- CaptureVisionRouter クラスは、画像処理タスクを管理し、さまざまな画像処理モジュールを調整します。そのキャプチャ メソッドは入力画像を処理し、結果を返します。
- ReadPassportAndId は、処理モードを指定する組み込みテンプレートです。 SDK は、MRZ 認識、文書端検出、バーコード検出などのさまざまな処理モードをサポートしています。
- get_parsed_result メソッドは、MRZ の認識結果を辞書として取得します。 MRZResult クラスは、関連する MRZ 情報を抽出してラップします。このクラスはさまざまなアプリケーション間で再利用できるため、utils.py ファイルに移動することをお勧めします。
次のセクションでは、OpenCV を使用して MRZ 認識結果を視覚化し、検出された MRZ ゾーンをパスポート画像上に表示します。
Visualizing Machine Readable Zone Location in a Passport Image
In the code above, result is an instance of the CapturedResult class. Calling its get_recognized_text_lines_result() method retrieves a list of TextLineResultItem objects. Each TextLineResultItem object contains the coordinates of the detected text line. Use the following code snippet to extract the coordinates and draw contours on the passport image:
cv_image = cv2.imread(image_path)
line_result = result.get_recognized_text_lines_result()
items = line_result.get_items()
for item in items:
location = item.get_location()
x1 = location.points[0].x
y1 = location.points[0].y
x2 = location.points[1].x
y2 = location.points[1].y
x3 = location.points[2].x
y3 = location.points[2].y
x4 = location.points[3].x
y4 = location.points[3].y
del location
cv2.drawContours(
cv_image, [np.intp([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
cv2.imshow(
"Original Image with Detected MRZ Zone", cv_image)
cv2.waitKey(0)
cv2.destroyAllWindows()

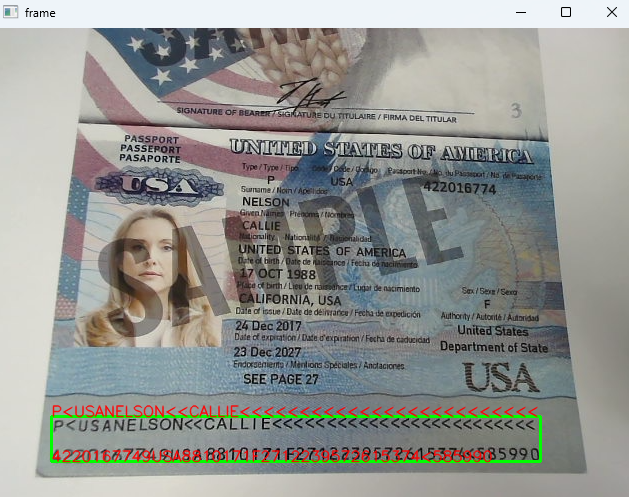
Scanning and Recognizing MRZ in Real-time via Webcam
Scanning and recognizing MRZ in real-time via webcam requires capturing a continuous image stream. We can use the OpenCV library to capture frames from the webcam and process them with the Dynamsoft Capture Vision SDK. The following code snippet demonstrates how to implement real-time MRZ recognition using a webcam:
from dynamsoft_capture_vision_bundle import *
import cv2
import numpy as np
import queue
from utils import *
class FrameFetcher(ImageSourceAdapter):
def has_next_image_to_fetch(self) -> bool:
return True
def add_frame(self, imageData):
self.add_image_to_buffer(imageData)
class MyCapturedResultReceiver(CapturedResultReceiver):
def __init__(self, result_queue):
super().__init__()
self.result_queue = result_queue
def on_captured_result_received(self, captured_result):
self.result_queue.put(captured_result)
if __name__ == '__main__':
errorCode, errorMsg = LicenseManager.init_license(
"LICENSE-KEY")
if errorCode != EnumErrorCode.EC_OK and errorCode != EnumErrorCode.EC_LICENSE_CACHE_USED:
print("License initialization failed: ErrorCode:",
errorCode, ", ErrorString:", errorMsg)
else:
vc = cv2.VideoCapture(0)
if not vc.isOpened():
print("Error: Camera is not opened!")
exit(1)
cvr = CaptureVisionRouter()
fetcher = FrameFetcher()
cvr.set_input(fetcher)
# Create a thread-safe queue to store captured items
result_queue = queue.Queue()
receiver = MyCapturedResultReceiver(result_queue)
cvr.add_result_receiver(receiver)
errorCode, errorMsg = cvr.start_capturing("ReadPassportAndId")
if errorCode != EnumErrorCode.EC_OK:
print("error:", errorMsg)
while True:
ret, frame = vc.read()
if not ret:
print("Error: Cannot read frame!")
break
fetcher.add_frame(convertMat2ImageData(frame))
if not result_queue.empty():
captured_result = result_queue.get_nowait()
items = captured_result.get_items()
for item in items:
if item.get_type() == EnumCapturedResultItemType.CRIT_TEXT_LINE:
text = item.get_text()
line_results = text.split('\n')
location = item.get_location()
x1 = location.points[0].x
y1 = location.points[0].y
x2 = location.points[1].x
y2 = location.points[1].y
x3 = location.points[2].x
y3 = location.points[2].y
x4 = location.points[3].x
y4 = location.points[3].y
cv2.drawContours(
frame, [np.intp([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
delta = y3 - y1
for line_result in line_results:
cv2.putText(
frame, line_result, (x1, y1), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 1, cv2.LINE_AA)
y1 += delta
del location
elif item.get_type() == EnumCapturedResultItemType.CRIT_PARSED_RESULT:
mrz_result = MRZResult(item)
print(mrz_result.to_string())
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.imshow('frame', frame)
cvr.stop_capturing()
vc.release()
cv2.destroyAllWindows()
Explanation
- The FrameFetcher class implements the ImageSourceAdapter interface to feed frame data into the built-in buffer.
- The MyCapturedResultReceiver class implements the CapturedResultReceiver interface. The on_captured_result_received method runs on a native C++ worker thread, sending CapturedResult objects to the main thread where they are stored in a thread-safe queue for further use.
- A CapturedResult contains several CapturedResultItem objects. The CRIT_TEXT_LINE type represents recognized text lines, while the CRIT_PARSED_RESULT type represents parsed MRZ data.
Running the Real-time MRZ Recognition Demo on Windows
Source Code
https://github.com/yushulx/python-mrz-scanner-sdk/tree/main/examples/official
Atas ialah kandungan terperinci Cara Melaksanakan Pengecaman Zon Boleh Baca Mesin (MRZ) dalam Python. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1668
1668
 14
1427
52
1329
25
1273
29
1256
24
14
1427
52
1329
25
1273
29
1256
24

 Python: Permainan, GUI, dan banyak lagi
Apr 13, 2025 am 12:14 AM
Python: Permainan, GUI, dan banyak lagi
Apr 13, 2025 am 12:14 AM
Python cemerlang dalam permainan dan pembangunan GUI. 1) Pembangunan permainan menggunakan pygame, menyediakan lukisan, audio dan fungsi lain, yang sesuai untuk membuat permainan 2D. 2) Pembangunan GUI boleh memilih tkinter atau pyqt. TKInter adalah mudah dan mudah digunakan, PYQT mempunyai fungsi yang kaya dan sesuai untuk pembangunan profesional.
 Python vs C: Lengkung pembelajaran dan kemudahan penggunaan
Apr 19, 2025 am 12:20 AM
Python vs C: Lengkung pembelajaran dan kemudahan penggunaan
Apr 19, 2025 am 12:20 AM
Python lebih mudah dipelajari dan digunakan, manakala C lebih kuat tetapi kompleks. 1. Sintaks Python adalah ringkas dan sesuai untuk pemula. Penaipan dinamik dan pengurusan memori automatik menjadikannya mudah digunakan, tetapi boleh menyebabkan kesilapan runtime. 2.C menyediakan kawalan peringkat rendah dan ciri-ciri canggih, sesuai untuk aplikasi berprestasi tinggi, tetapi mempunyai ambang pembelajaran yang tinggi dan memerlukan memori manual dan pengurusan keselamatan jenis.
 Python dan Masa: Memanfaatkan masa belajar anda
Apr 14, 2025 am 12:02 AM
Python dan Masa: Memanfaatkan masa belajar anda
Apr 14, 2025 am 12:02 AM
Untuk memaksimumkan kecekapan pembelajaran Python dalam masa yang terhad, anda boleh menggunakan modul, masa, dan modul Python. 1. Modul DateTime digunakan untuk merakam dan merancang masa pembelajaran. 2. Modul Masa membantu menetapkan kajian dan masa rehat. 3. Modul Jadual secara automatik mengatur tugas pembelajaran mingguan.
 Python vs C: Meneroka Prestasi dan Kecekapan
Apr 18, 2025 am 12:20 AM
Python vs C: Meneroka Prestasi dan Kecekapan
Apr 18, 2025 am 12:20 AM
Python lebih baik daripada C dalam kecekapan pembangunan, tetapi C lebih tinggi dalam prestasi pelaksanaan. 1. Sintaks ringkas Python dan perpustakaan yang kaya meningkatkan kecekapan pembangunan. 2. Ciri-ciri jenis kompilasi dan kawalan perkakasan meningkatkan prestasi pelaksanaan. Apabila membuat pilihan, anda perlu menimbang kelajuan pembangunan dan kecekapan pelaksanaan berdasarkan keperluan projek.
 Yang merupakan sebahagian daripada Perpustakaan Standard Python: Senarai atau Array?
Apr 27, 2025 am 12:03 AM
Yang merupakan sebahagian daripada Perpustakaan Standard Python: Senarai atau Array?
Apr 27, 2025 am 12:03 AM
Pythonlistsarepartofthestandardlibrary, sementara
 Pembelajaran Python: Adakah 2 jam kajian harian mencukupi?
Apr 18, 2025 am 12:22 AM
Pembelajaran Python: Adakah 2 jam kajian harian mencukupi?
Apr 18, 2025 am 12:22 AM
Adakah cukup untuk belajar Python selama dua jam sehari? Ia bergantung pada matlamat dan kaedah pembelajaran anda. 1) Membangunkan pelan pembelajaran yang jelas, 2) Pilih sumber dan kaedah pembelajaran yang sesuai, 3) mengamalkan dan mengkaji semula dan menyatukan amalan tangan dan mengkaji semula dan menyatukan, dan anda secara beransur-ansur boleh menguasai pengetahuan asas dan fungsi lanjutan Python dalam tempoh ini.
 Python: Automasi, skrip, dan pengurusan tugas
Apr 16, 2025 am 12:14 AM
Python: Automasi, skrip, dan pengurusan tugas
Apr 16, 2025 am 12:14 AM
Python cemerlang dalam automasi, skrip, dan pengurusan tugas. 1) Automasi: Sandaran fail direalisasikan melalui perpustakaan standard seperti OS dan Shutil. 2) Penulisan Skrip: Gunakan Perpustakaan Psutil untuk memantau sumber sistem. 3) Pengurusan Tugas: Gunakan perpustakaan jadual untuk menjadualkan tugas. Kemudahan penggunaan Python dan sokongan perpustakaan yang kaya menjadikannya alat pilihan di kawasan ini.
 Python vs C: Memahami perbezaan utama
Apr 21, 2025 am 12:18 AM
Python vs C: Memahami perbezaan utama
Apr 21, 2025 am 12:18 AM
Python dan C masing -masing mempunyai kelebihan sendiri, dan pilihannya harus berdasarkan keperluan projek. 1) Python sesuai untuk pembangunan pesat dan pemprosesan data kerana sintaks ringkas dan menaip dinamik. 2) C sesuai untuk prestasi tinggi dan pengaturcaraan sistem kerana menaip statik dan pengurusan memori manual.
