
 pembangunan bahagian belakang
Tutorial Python
Membina sistem navigasi dron menggunakan algoritma matplotlib dan A*
pembangunan bahagian belakang
Tutorial Python
Membina sistem navigasi dron menggunakan algoritma matplotlib dan A*
Membina sistem navigasi dron menggunakan algoritma matplotlib dan A*

Pernahkah anda terfikir bagaimana dron menavigasi melalui persekitaran yang kompleks? Dalam blog ini, kami akan mencipta sistem navigasi dron mudah menggunakan Python, Matplotlib dan algoritma A*. Pada akhirnya, anda akan mempunyai sistem kerja yang menggambarkan dron menyelesaikan labirin!
Apa yang Anda Akan Pelajari
- Istilah AI asas seperti "ejen" dan "persekitaran."
- Cara mencipta dan menggambarkan labirin dengan Python.
- Cara algoritma A* berfungsi untuk menyelesaikan masalah navigasi.
- Cara melaksanakan dan menggambarkan laluan dron.
Pengenalan
Untuk membina sistem navigasi dron kami, kami memerlukan perkara berikut:
- Ejen: Drone ?.
- Laluan: Maze 2D yang akan dilalui dron ?️.
- Algoritma carian: Algoritma A* ⭐.
Tetapi pertama, mari kita semak beberapa istilah AI asas untuk mereka yang baharu.
Syarat AI Utama
- Agen: Entiti (seperti dron kami) yang melihat persekitarannya (maze) dan mengambil tindakan untuk mencapai matlamat (mencapai penghujung labirin).
- Persekitaran: Dunia tempat ejen beroperasi, di sini diwakili sebagai labirin 2D.
- Heuristik: Peraturan praktikal atau anggaran yang digunakan untuk membimbing carian (seperti mengukur jarak ke matlamat).
Reka Bentuk Sistem
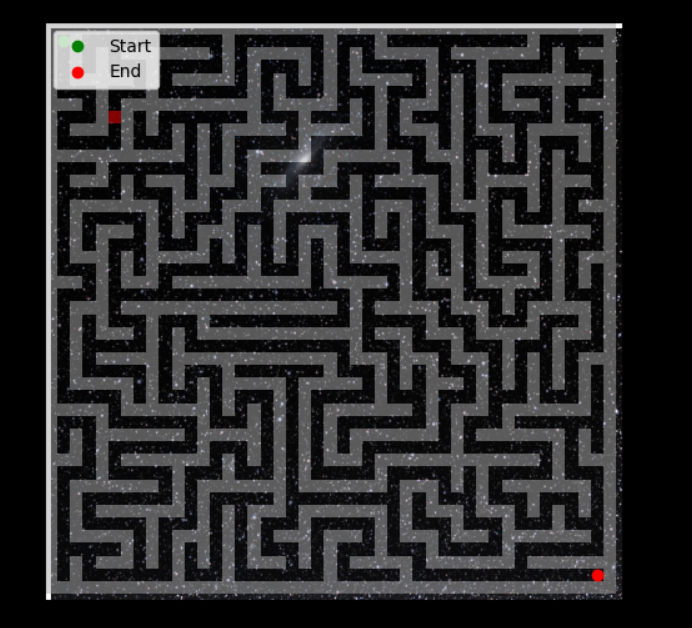
Don kami akan menavigasi maze 2D. Maze akan terdiri daripada:
- Tembok (kawasan tidak boleh dilalui diwakili oleh 1s).
- Laluan (ruang terbuka diwakili oleh 0s).
Objektif dron:
- Elakkan dinding.?
- Sampai penghujung jalan.?
Begini rupa labirin itu:
Langkah 1: Sediakan Maze
Import Perpustakaan Diperlukan
Mula-mula, pasang dan import perpustakaan yang diperlukan:
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
Tentukan Dimensi Maze
Mari tentukan saiz labirin:
ular sawa
LEBAR, TINGGI = 22, 22
Tetapkan Arah dan Berat
Dalam navigasi dunia sebenar, pergerakan ke arah yang berbeza boleh mempunyai kos yang berbeza-beza. Contohnya, bergerak ke utara mungkin lebih sukar daripada bergerak ke timur.
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
Memulakan Grid Maze
Kita mulakan dengan grid yang dipenuhi dengan dinding (1s):
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
The numpy. fungsi ones() digunakan untuk mencipta tatasusunan baharu bagi bentuk dan jenis tertentu, diisi dengan satu... berguna dalam memulakan tatasusunan dengan nilai lalai.
Langkah 2: Mengukir Maze
Sekarang mari kita tentukan fungsi yang akan "mengukir" laluan dalam mez anda yang kini dimulakan dengan hanya dinding
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
Tentukan Titik Mula dan Tamat
maze = np.ones((2 * WIDTH + 1, 2 * HEIGHT + 1), dtype=int)
Langkah 3: Memvisualisasikan Maze
Gunakan Matplotlib untuk memaparkan maze:
def carve(x, y):
maze[2 * x + 1, 2 * y + 1] = 0 # Mark current cell as a path
directions = list(DIRECTIONS.items())
random.shuffle(directions) # Randomize directions
for _, (dx, dy) in directions:
nx, ny = x + dx, y + dy
if 0 <= nx < WIDTH and 0 <= ny < HEIGHT and maze[2 * nx + 1, 2 * ny + 1] == 1:
maze[2 * x + 1 + dx, 2 * y + 1 + dy] = 0
carve(nx, ny)
carve(0, 0) # Start carving from the top-left corner
Langkah 4: Menyelesaikan Maze dengan A*
Algoritma A* mencari laluan terpendek dalam maze berwajaran menggunakan gabungan kos laluan dan heuristik.
Takrifkan Heuristik
Kami menggunakan jarak Euclidean sebagai heuristik kami:
start = (1, 1) end = (2 * WIDTH - 1, 2 * HEIGHT - 1) maze[start] = 0 maze[end] = 0
A* Pelaksanaan Algoritma
fig, ax = plt.subplots(figsize=(8, 6))
ax.imshow(maze, cmap='binary', interpolation='nearest')
ax.set_title("2D Maze")
plt.show()
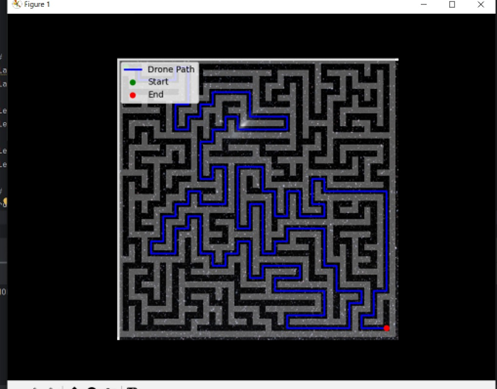
Langkah 5: Visualisasikan Penyelesaian
Kami mempunyai labirin tetapi anda masih belum dapat melihat laluan dron itu.
Mari kita bayangkan laluan dron:
def heuristic(a, b):
return math.sqrt((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2)
Kesimpulan
Tahniah! ? Anda telah membina sistem navigasi dron yang berfungsi:
- Menghasilkan labirin 2D.
- Selesaikannya menggunakan algoritma A*.
- Membayangkan laluan terpendek.

Langkah Seterusnya
- Percubaan dengan saiz dan berat labirin yang berbeza.
- Cuba heuristik lain seperti jarak Manhattan.
- Visualkan labirin 3D untuk lebih kerumitan!
Jangan ragu untuk berkongsi keputusan anda atau bertanya soalan dalam ulasan di bawah.
Ke infiniti dan seterusnya ?
Atas ialah kandungan terperinci Membina sistem navigasi dron menggunakan algoritma matplotlib dan A*. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1668
1668
 14
1426
52
1328
25
1273
29
1255
24
14
1426
52
1328
25
1273
29
1255
24

 Python: Permainan, GUI, dan banyak lagi
Apr 13, 2025 am 12:14 AM
Python: Permainan, GUI, dan banyak lagi
Apr 13, 2025 am 12:14 AM
Python cemerlang dalam permainan dan pembangunan GUI. 1) Pembangunan permainan menggunakan pygame, menyediakan lukisan, audio dan fungsi lain, yang sesuai untuk membuat permainan 2D. 2) Pembangunan GUI boleh memilih tkinter atau pyqt. TKInter adalah mudah dan mudah digunakan, PYQT mempunyai fungsi yang kaya dan sesuai untuk pembangunan profesional.
 Python vs C: Lengkung pembelajaran dan kemudahan penggunaan
Apr 19, 2025 am 12:20 AM
Python vs C: Lengkung pembelajaran dan kemudahan penggunaan
Apr 19, 2025 am 12:20 AM
Python lebih mudah dipelajari dan digunakan, manakala C lebih kuat tetapi kompleks. 1. Sintaks Python adalah ringkas dan sesuai untuk pemula. Penaipan dinamik dan pengurusan memori automatik menjadikannya mudah digunakan, tetapi boleh menyebabkan kesilapan runtime. 2.C menyediakan kawalan peringkat rendah dan ciri-ciri canggih, sesuai untuk aplikasi berprestasi tinggi, tetapi mempunyai ambang pembelajaran yang tinggi dan memerlukan memori manual dan pengurusan keselamatan jenis.
 Python dan Masa: Memanfaatkan masa belajar anda
Apr 14, 2025 am 12:02 AM
Python dan Masa: Memanfaatkan masa belajar anda
Apr 14, 2025 am 12:02 AM
Untuk memaksimumkan kecekapan pembelajaran Python dalam masa yang terhad, anda boleh menggunakan modul, masa, dan modul Python. 1. Modul DateTime digunakan untuk merakam dan merancang masa pembelajaran. 2. Modul Masa membantu menetapkan kajian dan masa rehat. 3. Modul Jadual secara automatik mengatur tugas pembelajaran mingguan.
 Python vs C: Meneroka Prestasi dan Kecekapan
Apr 18, 2025 am 12:20 AM
Python vs C: Meneroka Prestasi dan Kecekapan
Apr 18, 2025 am 12:20 AM
Python lebih baik daripada C dalam kecekapan pembangunan, tetapi C lebih tinggi dalam prestasi pelaksanaan. 1. Sintaks ringkas Python dan perpustakaan yang kaya meningkatkan kecekapan pembangunan. 2. Ciri-ciri jenis kompilasi dan kawalan perkakasan meningkatkan prestasi pelaksanaan. Apabila membuat pilihan, anda perlu menimbang kelajuan pembangunan dan kecekapan pelaksanaan berdasarkan keperluan projek.
 Yang merupakan sebahagian daripada Perpustakaan Standard Python: Senarai atau Array?
Apr 27, 2025 am 12:03 AM
Yang merupakan sebahagian daripada Perpustakaan Standard Python: Senarai atau Array?
Apr 27, 2025 am 12:03 AM
Pythonlistsarepartofthestandardlibrary, sementara
 Python: Automasi, skrip, dan pengurusan tugas
Apr 16, 2025 am 12:14 AM
Python: Automasi, skrip, dan pengurusan tugas
Apr 16, 2025 am 12:14 AM
Python cemerlang dalam automasi, skrip, dan pengurusan tugas. 1) Automasi: Sandaran fail direalisasikan melalui perpustakaan standard seperti OS dan Shutil. 2) Penulisan Skrip: Gunakan Perpustakaan Psutil untuk memantau sumber sistem. 3) Pengurusan Tugas: Gunakan perpustakaan jadual untuk menjadualkan tugas. Kemudahan penggunaan Python dan sokongan perpustakaan yang kaya menjadikannya alat pilihan di kawasan ini.
 Pembelajaran Python: Adakah 2 jam kajian harian mencukupi?
Apr 18, 2025 am 12:22 AM
Pembelajaran Python: Adakah 2 jam kajian harian mencukupi?
Apr 18, 2025 am 12:22 AM
Adakah cukup untuk belajar Python selama dua jam sehari? Ia bergantung pada matlamat dan kaedah pembelajaran anda. 1) Membangunkan pelan pembelajaran yang jelas, 2) Pilih sumber dan kaedah pembelajaran yang sesuai, 3) mengamalkan dan mengkaji semula dan menyatukan amalan tangan dan mengkaji semula dan menyatukan, dan anda secara beransur-ansur boleh menguasai pengetahuan asas dan fungsi lanjutan Python dalam tempoh ini.
 Python vs C: Memahami perbezaan utama
Apr 21, 2025 am 12:18 AM
Python vs C: Memahami perbezaan utama
Apr 21, 2025 am 12:18 AM
Python dan C masing -masing mempunyai kelebihan sendiri, dan pilihannya harus berdasarkan keperluan projek. 1) Python sesuai untuk pembangunan pesat dan pemprosesan data kerana sintaks ringkas dan menaip dinamik. 2) C sesuai untuk prestasi tinggi dan pengaturcaraan sistem kerana menaip statik dan pengurusan memori manual.
