

Python使用OpenCV进行标定

这篇文章主要介绍了关于Python使用OpenCV进行标定,有着一定的参考价值,现在分享给大家,有需要的朋友可以参考一下
本文结合OpenCV官方样例,对官方样例中的代码进行修改,使其能够正常运行,并对自己采集的数据进行实验和讲解。
一、准备
OpenCV使用棋盘格板进行标定,如下图所示。为了标定相机,我们需要输入一系列三维点和它们对应的二维图像点。在黑白相间的棋盘格上,二维图像点很容易通过角点检测找到。而对于真实世界中的三维点呢?由于我们采集中,是将相机放在一个地方,而将棋盘格定标板进行移动变换不同的位置,然后对其进行拍摄。所以我们需要知道(X,Y,Z)的值。但是简单来说,我们定义棋盘格所在平面为XY平面,即Z=0。对于定标板来说,我们可以知道棋盘格的方块尺寸,例如30mm,这样我们就可以把棋盘格上的角点坐标定义为(0,0,0),(30,0,0),(60,0,0),···,这个结果的单位是mm。
3D点称为object points,2D图像点称为image points。
二、检测棋盘格角点
为了找到棋盘格模板,我们使用openCV中的函数cv2.findChessboardCorners()。我们也需要告诉程序我们使用的模板是什么规格的,例如8*8的棋盘格或者5*5棋盘格等,建议使用x方向和y方向个数不相等的棋盘格模板。下面实验中,我们使用的是10*7的棋盘格,每个方格边长是20mm,即含有9*6的内部角点。这个函数如果检测到模板,会返回对应的角点,并返回true。当然不一定所有的图像都能找到需要的模板,所以我们可以使用多幅图像进行定标。除了使用棋盘格,我们还可以使用圆点阵,对应的函数为cv2.findCirclesGrid()。
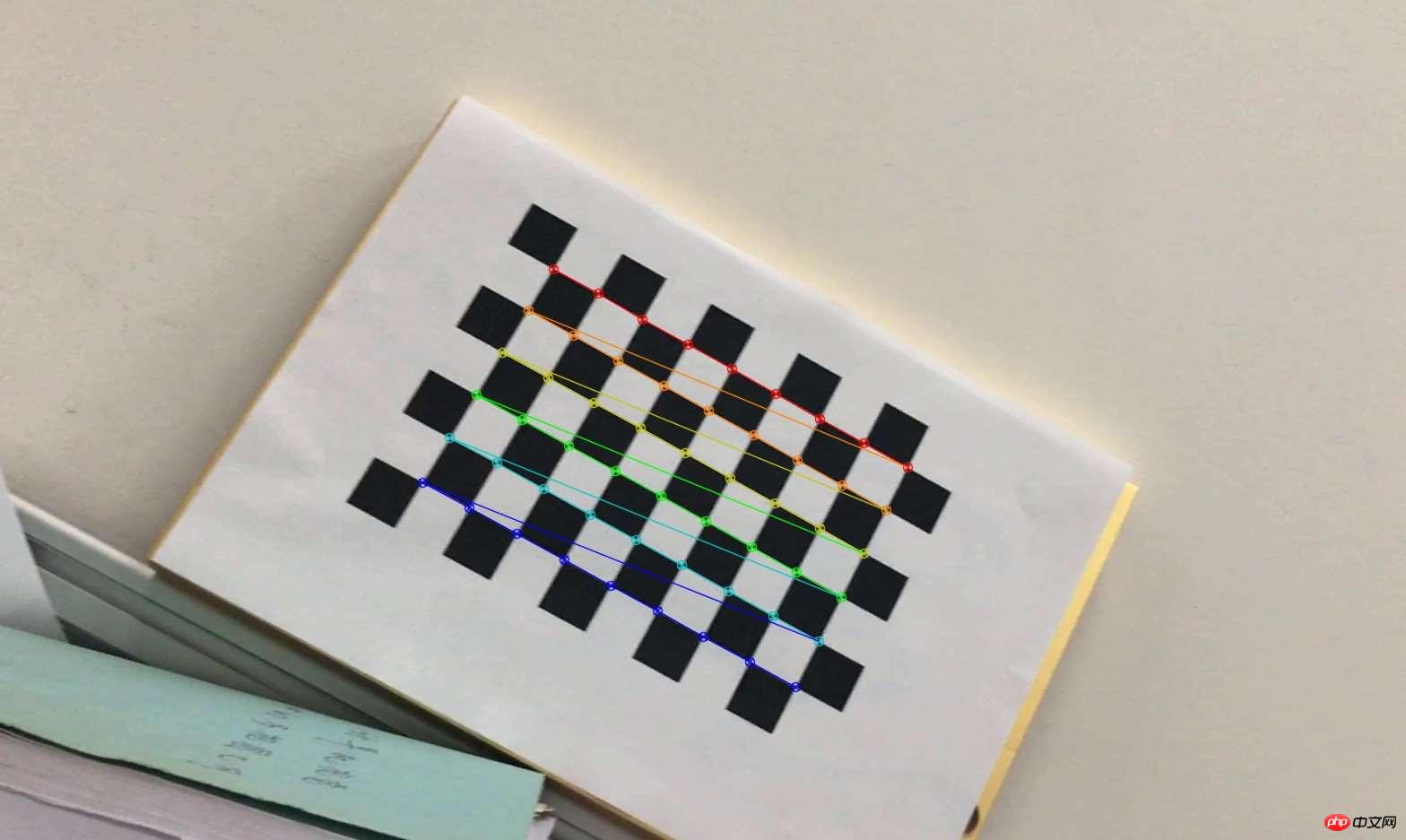
找到角点后,我们可以使用cv2.cornerSubPix()可以得到更为准确的角点像素坐标。我们也可以使用cv2.drawChessboardCorners()将角点绘制到图像上显示。如下图所示:
三、标定
通过上面的步骤,我们得到了用于标定的三维点和与其对应的图像上的二维点对。我们使用cv2.calibrateCamera()进行标定,这个函数会返回标定结果、相机的内参数矩阵、畸变系数、旋转矩阵和平移向量。
四、去畸变
第三步我们已经得到了相机内参和畸变系数,在将图像去畸变之前,我们还可以使用cv.getOptimalNewCameraMatrix()优化内参数和畸变系数,通过设定自由自由比例因子alpha。当alpha设为0的时候,将会返回一个剪裁过的将去畸变后不想要的像素去掉的内参数和畸变系数;当alpha设为1的时候,将会返回一个包含额外黑色像素点的内参数和畸变系数,并返回一个ROI用于将其剪裁掉。
然后我们就可以使用新得到的内参数矩阵和畸变系数对图像进行去畸变了。有两种方法进行去畸变:
(1)使用cv2.undistort()
这是一个最直接的办法,只用直接调用函数就可以得到去畸变的图像,使用上面的ROI可以对其进行剪裁。代码如下:
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
下图显示将一张图片去畸变后,保留黑色像素的结果:
(2)使用remmaping
这是一个分两步的方法,首先计算一个从畸变图像到非畸变图像的映射,然后使用这个映射关系对图像进行去畸变。
代码如下:
# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
五、反投影误差
通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
代码
所有步骤的代码如下所示:
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
相关推荐:
Atas ialah kandungan terperinci Python使用OpenCV进行标定. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1382
1382
 52
52

 PHP dan Python: Contoh dan perbandingan kod
Apr 15, 2025 am 12:07 AM
PHP dan Python: Contoh dan perbandingan kod
Apr 15, 2025 am 12:07 AM
PHP dan Python mempunyai kelebihan dan kekurangan mereka sendiri, dan pilihannya bergantung kepada keperluan projek dan keutamaan peribadi. 1.PHP sesuai untuk pembangunan pesat dan penyelenggaraan aplikasi web berskala besar. 2. Python menguasai bidang sains data dan pembelajaran mesin.
 Python vs JavaScript: Komuniti, Perpustakaan, dan Sumber
Apr 15, 2025 am 12:16 AM
Python vs JavaScript: Komuniti, Perpustakaan, dan Sumber
Apr 15, 2025 am 12:16 AM
Python dan JavaScript mempunyai kelebihan dan kekurangan mereka sendiri dari segi komuniti, perpustakaan dan sumber. 1) Komuniti Python mesra dan sesuai untuk pemula, tetapi sumber pembangunan depan tidak kaya dengan JavaScript. 2) Python berkuasa dalam bidang sains data dan perpustakaan pembelajaran mesin, sementara JavaScript lebih baik dalam perpustakaan pembangunan dan kerangka pembangunan depan. 3) Kedua -duanya mempunyai sumber pembelajaran yang kaya, tetapi Python sesuai untuk memulakan dengan dokumen rasmi, sementara JavaScript lebih baik dengan MDNWebDocs. Pilihan harus berdasarkan keperluan projek dan kepentingan peribadi.
 Bagaimana sokongan GPU untuk Pytorch di CentOS
Apr 14, 2025 pm 06:48 PM
Bagaimana sokongan GPU untuk Pytorch di CentOS
Apr 14, 2025 pm 06:48 PM
Membolehkan pecutan GPU pytorch pada sistem CentOS memerlukan pemasangan cuda, cudnn dan GPU versi pytorch. Langkah-langkah berikut akan membimbing anda melalui proses: Pemasangan CUDA dan CUDNN Tentukan keserasian versi CUDA: Gunakan perintah NVIDIA-SMI untuk melihat versi CUDA yang disokong oleh kad grafik NVIDIA anda. Sebagai contoh, kad grafik MX450 anda boleh menyokong CUDA11.1 atau lebih tinggi. Muat turun dan pasang Cudatoolkit: Lawati laman web rasmi Nvidiacudatoolkit dan muat turun dan pasang versi yang sepadan mengikut versi CUDA tertinggi yang disokong oleh kad grafik anda. Pasang Perpustakaan Cudnn:
 Penjelasan terperinci mengenai Prinsip Docker
Apr 14, 2025 pm 11:57 PM
Penjelasan terperinci mengenai Prinsip Docker
Apr 14, 2025 pm 11:57 PM
Docker menggunakan ciri -ciri kernel Linux untuk menyediakan persekitaran berjalan yang cekap dan terpencil. Prinsip kerjanya adalah seperti berikut: 1. Cermin digunakan sebagai templat baca sahaja, yang mengandungi semua yang anda perlukan untuk menjalankan aplikasi; 2. Sistem Fail Kesatuan (Unionfs) menyusun pelbagai sistem fail, hanya menyimpan perbezaan, menjimatkan ruang dan mempercepatkan; 3. Daemon menguruskan cermin dan bekas, dan pelanggan menggunakannya untuk interaksi; 4. Ruang nama dan cgroups melaksanakan pengasingan kontena dan batasan sumber; 5. Pelbagai mod rangkaian menyokong interkoneksi kontena. Hanya dengan memahami konsep -konsep teras ini, anda boleh menggunakan Docker dengan lebih baik.
 Keserasian Centos Miniopen
Apr 14, 2025 pm 05:45 PM
Keserasian Centos Miniopen
Apr 14, 2025 pm 05:45 PM
Penyimpanan Objek Minio: Penyebaran berprestasi tinggi di bawah CentOS System Minio adalah prestasi tinggi, sistem penyimpanan objek yang diedarkan yang dibangunkan berdasarkan bahasa Go, serasi dengan Amazons3. Ia menyokong pelbagai bahasa pelanggan, termasuk Java, Python, JavaScript, dan GO. Artikel ini akan memperkenalkan pemasangan dan keserasian minio pada sistem CentOS. Keserasian versi CentOS Minio telah disahkan pada pelbagai versi CentOS, termasuk tetapi tidak terhad kepada: CentOS7.9: Menyediakan panduan pemasangan lengkap yang meliputi konfigurasi kluster, penyediaan persekitaran, tetapan fail konfigurasi, pembahagian cakera, dan mini
 Cara Mengendalikan Latihan Pittorch Diagihkan di Centos
Apr 14, 2025 pm 06:36 PM
Cara Mengendalikan Latihan Pittorch Diagihkan di Centos
Apr 14, 2025 pm 06:36 PM
Latihan yang diedarkan Pytorch pada sistem CentOS memerlukan langkah -langkah berikut: Pemasangan Pytorch: Premisnya ialah Python dan PIP dipasang dalam sistem CentOS. Bergantung pada versi CUDA anda, dapatkan arahan pemasangan yang sesuai dari laman web rasmi Pytorch. Untuk latihan CPU sahaja, anda boleh menggunakan arahan berikut: PipinstallToRchTorchVisionTorchaudio Jika anda memerlukan sokongan GPU, pastikan versi CUDA dan CUDNN yang sama dipasang dan gunakan versi pytorch yang sepadan untuk pemasangan. Konfigurasi Alam Sekitar Teragih: Latihan yang diedarkan biasanya memerlukan pelbagai mesin atau mesin berbilang mesin tunggal. Tempat
 Cara Memilih Versi PyTorch di CentOS
Apr 14, 2025 pm 06:51 PM
Cara Memilih Versi PyTorch di CentOS
Apr 14, 2025 pm 06:51 PM
Apabila memasang pytorch pada sistem CentOS, anda perlu dengan teliti memilih versi yang sesuai dan pertimbangkan faktor utama berikut: 1. Keserasian Persekitaran Sistem: Sistem Operasi: Adalah disyorkan untuk menggunakan CentOS7 atau lebih tinggi. CUDA dan CUDNN: Versi Pytorch dan versi CUDA berkait rapat. Sebagai contoh, Pytorch1.9.0 memerlukan CUDA11.1, manakala Pytorch2.0.1 memerlukan CUDA11.3. Versi CUDNN juga mesti sepadan dengan versi CUDA. Sebelum memilih versi PyTorch, pastikan anda mengesahkan bahawa versi CUDA dan CUDNN yang serasi telah dipasang. Versi Python: Cawangan Rasmi Pytorch
 Python: Automasi, skrip, dan pengurusan tugas
Apr 16, 2025 am 12:14 AM
Python: Automasi, skrip, dan pengurusan tugas
Apr 16, 2025 am 12:14 AM
Python cemerlang dalam automasi, skrip, dan pengurusan tugas. 1) Automasi: Sandaran fail direalisasikan melalui perpustakaan standard seperti OS dan Shutil. 2) Penulisan Skrip: Gunakan Perpustakaan Psutil untuk memantau sumber sistem. 3) Pengurusan Tugas: Gunakan perpustakaan jadual untuk menjadualkan tugas. Kemudahan penggunaan Python dan sokongan perpustakaan yang kaya menjadikannya alat pilihan di kawasan ini.
